Unsupervised Adversarial Defense through Tandem Deep Image Priors


Abstract
:1. Introduction
- This paper proposes the t-DIPs, an unsupervised generative model to defend adversarial examples. The first DIP network captures the main information of image. The second DIP network recovers clean-version image based on the output of the first DIP network.
- The proposed method serves as a preprocessing module and does not require pre-training. Therefore, it reduces the time and computation cost and can be applied to any image classification network without modification.
- The proposed method can achieve higher accuracy than the current state-of-the-art defense on a variety of adversarial attacks.
2. Background and Related Works
2.1. Definitions and Notations
2.2. Methods for Generating Adversarial Examples
2.3. Defense Against Adversarial Examples
3. Methods
3.1. The Basic Idea of Tandem Deep Image Priors
3.2. Network Structure of Tandem Deep Image Priors
3.2.1. The First Deep Image Prior Network
3.2.2. The Second Deep Image Prior Network
3.3. Loss Functions
4. Experimental Results and Discussion
4.1. Adversarial Examples
4.2. DIP vs. t-DIPs
4.3. Comparisons with Other Defensive Methods
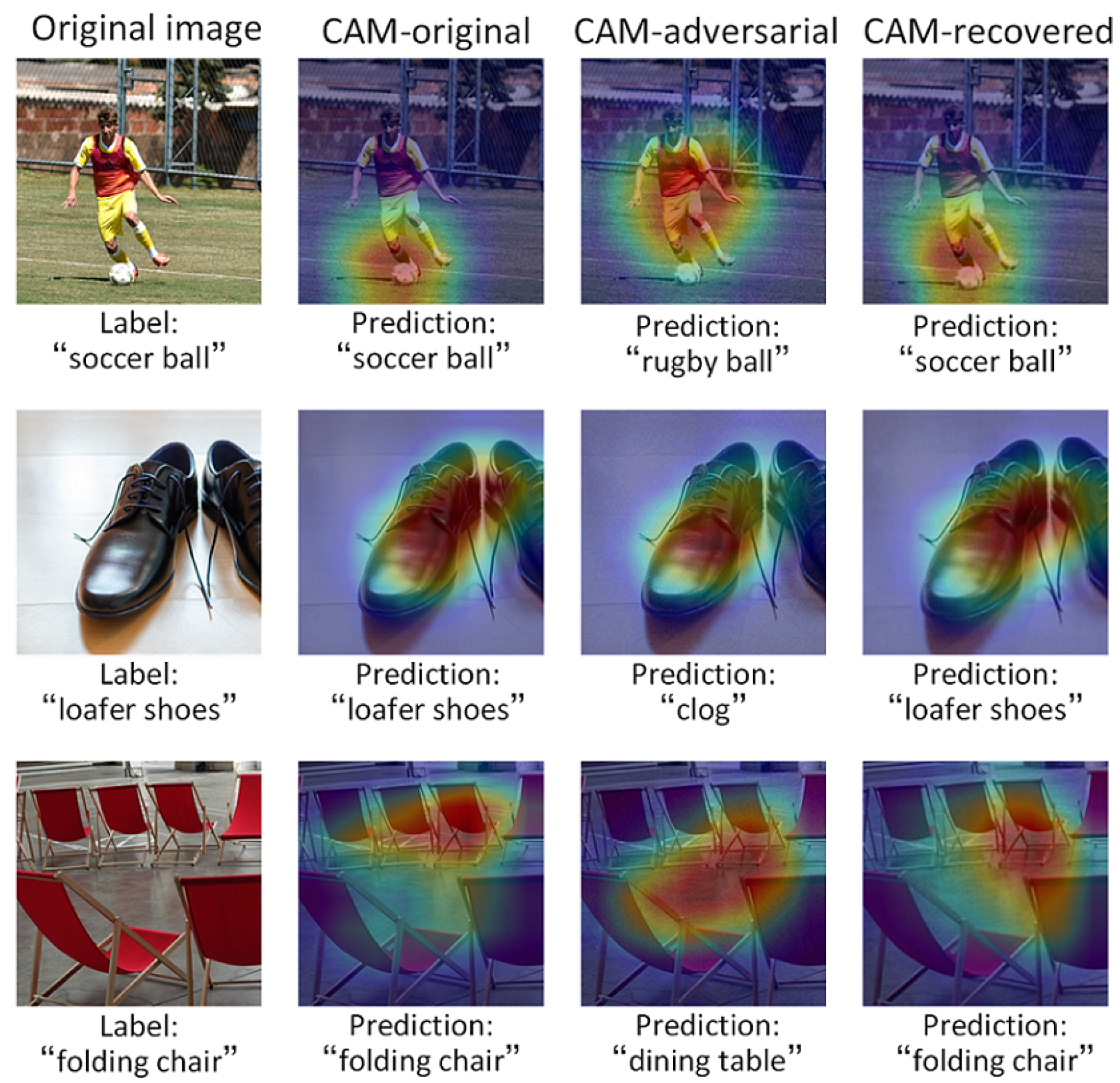
4.4. Analysis of the Proposed Method
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lecun, Y.; Bengio, Y.; Hinton, G.E. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Hinton, G.E.; Deng, L.; Yu, D.; Dahl, G.E.; Mohamed, A.; Jaitly, N.; Senior, A.W.; Vanhoucke, V.; Nguyen, P.; Sainath, T.N.; et al. Deep Neural Networks for Acoustic Modeling in Speech Recognition: The Shared Views of Four Research Groups. IEEE Signal Process. Mag. 2012, 29, 82–97. [Google Scholar] [CrossRef]
- Collobert, R.; Weston, J. A unified architecture for natural language processing: Deep neural networks with multitask learning. In Proceedings of the 25th International Conference on Machine Learning, Helsinki, Finland, 5–9 July 2008; pp. 160–167. [Google Scholar]
- Szegedy, C.; Zaremba, W.; Sutskever, I.; Bruna, J.; Erhan, D.; Goodfellow, I.; Fergus, R. Intriguing properties of neural networks. arXiv 2013, arXiv:1312.6199. [Google Scholar]
- Goodfellow, I.; Shlens, J.; Szegedy, C. Explaining and Harnessing Adversarial Examples. arXiv 2014, arXiv:1412.6572. [Google Scholar]
- Kwon, H.; Kim, Y.; Yoon, H.; Choi, D. Random untargeted adversarial example on deep neural network. Symmetry 2018, 10, 738. [Google Scholar] [CrossRef] [Green Version]
- Kurakin, A.; Goodfellow, I.; Bengio, S. Adversarial examples in the physical world. arXiv 2016, arXiv:1607.02533. [Google Scholar]
- Evtimov, I.; Eykholt, K.; Fernandes, E.; Kohno, T.; Li, B.; Prakash, A.; Rahmati, A.; Song, D. Robust Physical- World Attacks on Deep Learning Models. Cryptogr. Secur. 2017, 2, 4. [Google Scholar]
- Athalye, A.; Engstrom, L.; Ilyas, A.; Kwok, K. Synthesizing robust adversarial examples. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; pp. 284–293. [Google Scholar]
- Xu, X.; Zhao, H.; Jia, J. Dynamic Divide-and-Conquer Adversarial Training for Robust Semantic Segmentation. In Proceedings of the Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–20 June 2020. [Google Scholar]
- Du, X.; Yu, J.; Yi, Z.; Li, S.; Ma, J.; Tan, Y.; Wu, Q. A Hybrid Adversarial Attack for Different Application Scenarios. Appl. Sci. 2020, 10, 3559. [Google Scholar] [CrossRef]
- Xie, C.; Wang, J.; Zhang, Z.; Ren, Z.; Yuille, A. Mitigating adversarial effects through randomization. arXiv 2017, arXiv:1711.01991. [Google Scholar]
- Zhou, Y.; Kantarcioglu, M.; Xi, B. Efficacy of defending deep neural networks against adversarial attacks with randomization. In Proceedings of the Artificial Intelligence and Machine Learning for Multi-Domain Operations Applications II, Bellingham, WA, USA, 27 April–8 May 2020; Volume 11413, p. 114130Q. [Google Scholar]
- Liao, F.; Liang, M.; Dong, Y.; Pang, T.; Hu, X.; Zhu, J. Defense against adversarial attacks using high-level representation guided denoiser. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 1778–1787. [Google Scholar]
- Jia, X.; Wei, X.; Cao, X.; Foroosh, H. Comdefend: An efficient image compression model to defend adversarial examples. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 6084–6092. [Google Scholar]
- Madry, A.; Makelov, A.; Schmidt, L.; Tsipras, D.; Vladu, A. Towards Deep Learning Models Resistant to Adversarial Attacks. arXiv 2017, arXiv:1706.06083. [Google Scholar]
- Tramer, F.; Kurakin, A.; Papernot, N.; Goodfellow, I.; Boneh, D.; Mcdaniel, P. Ensemble Adversarial Training: Attacks and Defenses. arXiv 2017, arXiv:1705.07204. [Google Scholar]
- Kannan, H.; Kurakin, A.; Goodfellow, I. Adversarial Logit Pairing. arXiv 2018, arXiv:1803.06373. [Google Scholar]
- Grosse, K.; Manoharan, P.; Papernot, N.; Backes, M.; Mcdaniel, P. On the (Statistical) Detection of Adversarial Examples. arXiv 2017, arXiv:1702.06280. [Google Scholar]
- Gong, Z.; Wang, W.; Ku, W. Adversarial and Clean Data Are Not Twins. arXiv 2017, arXiv:1704.04960. [Google Scholar]
- Frosst, N.; Sabour, S.; Hinton, G.E. DARCCC: Detecting Adversaries by Reconstruction from Class Conditional Capsules. arXiv 2018, arXiv:1811.06969. [Google Scholar]
- Ulyanov, D.; Vedaldi, A.; Lempitsky, V. Deep image prior. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 9446–9454. [Google Scholar]
- Kurakin, A.; Goodfellow, I.; Bengio, S. Adversarial Machine Learning at Scale. In Proceedings of the Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Dong, Y.; Liao, F.; Pang, T.; Su, H.; Zhu, J.; Hu, X.; Li, J. Boosting adversarial attacks with momentum. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 9185–9193. [Google Scholar]
- Carlini, N.; Wagner, D. Towards evaluating the robustness of neural networks. In Proceedings of the 2017 IEEE Symposium on Security and Privacy (sp), San Jose, CA, USA, 25 May 2017; pp. 39–57. [Google Scholar]
- Fan, W.; Sun, G.; Deng, X. RGN-Defense: Erasing adversarial perturbations using deep residual generative network. J. Electron. Imaging 2019, 28, 013027. [Google Scholar] [CrossRef]
- Entezari, N.; Papalexakis, E.E. TensorShield: Tensor-based Defense Against Adversarial Attacks on Images. arXiv 2020, arXiv:2002.10252. [Google Scholar]
- Xie, C.; Wu, Y.; Der Maaten, L.V.; Yuille, A.L.; He, K. Feature Denoising for Improving Adversarial Robustness. In Proceedings of the Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–20 June 2018. [Google Scholar]
- Jeddi, A.; Shafiee, M.J.; Karg, M.; Scharfenberger, C.; Wong, A. Learn2Perturb: An End-to-end Feature Perturbation Learning to Improve Adversarial Robustness. In Proceedings of the Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–20 June 2020. [Google Scholar]
- Freitas, S.; Chen, S.; Wang, Z.; Chau, D.H. UnMask: Adversarial Detection and Defense Through Robust Feature Alignment. In Proceedings of the Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–20 June 2020. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Kurakin, A.; Goodfellow, I.; Bengio, S.; Dong, Y.; Liao, F.; Liang, M.; Pang, T.; Zhu, J.; Hu, X.; Xie, C.; et al. Adversarial Attacks and Defences Competition. In Proceedings of the Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 195–231. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Rauber, J.; Brendel, W.; Bethge, M. Foolbox v0.8.0: A Python toolbox to benchmark the robustness of machine learning models. arXiv 2017, arXiv:1707.04131. [Google Scholar]
- Zhou, B.; Khosla, A.; Lapedriza, A.; Oliva, A.; Torralba, A. Learning deep features for discriminative localization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2921–2929. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Defense | Clean | FGSM | DeepFool | BIM | MI-FGSM | C&W |
|---|---|---|---|---|---|---|
| Inception-v3 | ||||||
| No Defense | 86.4% | 10.9% | 1% | 0% | 0% | 0% |
| HGD | 81.7% | 61.2% | 80.8% | 0.8% | 0.4% | 15.3% |
| ComDefend | 63.3% | 61.2% | 63.4% | 34% | 40.2% | 60.7% |
| Our method | 67.2% | 67.3% | 68.1% | 47.2% | 53.6% | 65.2% |
| ResNet152 | ||||||
| No Defense | 82.7% | 3.4% | 1.8% | 0% | 0% | 0% |
| HGD | 77.8% | 50.5% | 76.3% | 3.4% | 4% | 37.2% |
| ComDefend | 62% | 51.9% | 54.3% | 26.4% | 34.7% | 50.8% |
| Our method | 64.6% | 60.7% | 63.2% | 39% | 45.9% | 60.8% |
| DenseNet161 | ||||||
| No Defense | 79.6% | 1.3% | 1.5% | 0% | 0% | 0% |
| HGD | 73.7% | 41.4% | 71.3% | 2.6% | 2.8% | 28.8% |
| ComDefend | 61% | 50.8% | 52.3% | 23.5% | 28.7% | 50.1% |
| Our method | 60.8% | 56% | 59.2% | 24.6% | 33.8% | 52.4% |
| ResNet50 | ||||||
| No Defense | 76.7% | 1.9% | 1.4% | 0% | 0% | 0% |
| HGD | 72.5% | 46% | 70.3% | 3.8% | 4.2% | 32.9% |
| ComDefend | 55% | 44.5% | 46.3% | 22.1% | 28.2% | 44.4% |
| Our method | 59.2% | 56% | 55.3% | 32.5% | 40.6% | 54.4% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Fan, C.; Zou, L.; Sun, C.; Liu, Y. Unsupervised Adversarial Defense through Tandem Deep Image Priors. Electronics 2020, 9, 1957. https://doi.org/10.3390/electronics9111957
Shi Y, Fan C, Zou L, Sun C, Liu Y. Unsupervised Adversarial Defense through Tandem Deep Image Priors. Electronics. 2020; 9(11):1957. https://doi.org/10.3390/electronics9111957
Chicago/Turabian StyleShi, Yu, Cien Fan, Lian Zou, Caixia Sun, and Yifeng Liu. 2020. "Unsupervised Adversarial Defense through Tandem Deep Image Priors" Electronics 9, no. 11: 1957. https://doi.org/10.3390/electronics9111957