A Recent Electronic Control Circuit to a Throttle Device



Abstract
:1. Introduction
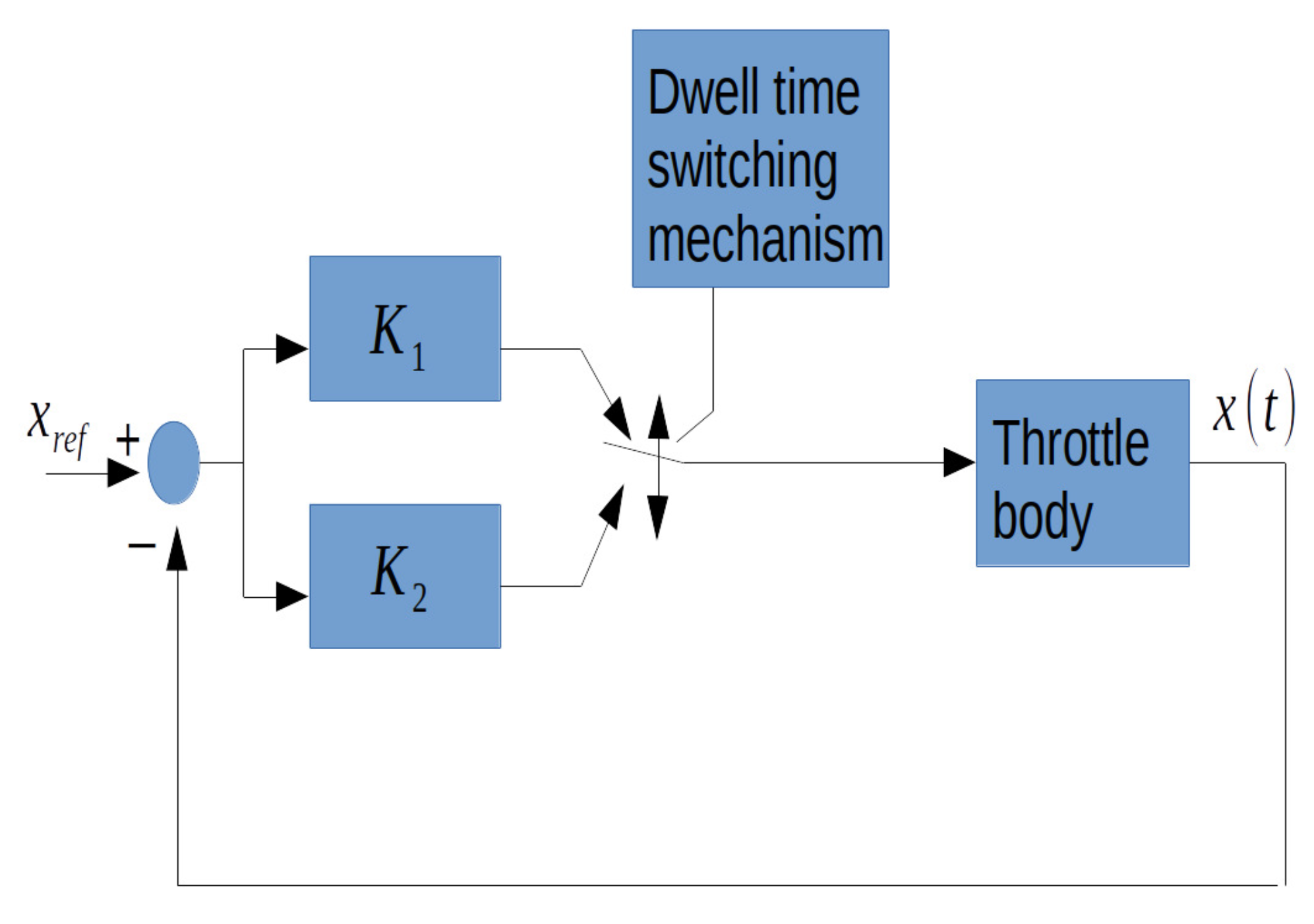
2. Theoretical Framework of the Electronic Control Circuit Design for the Mechanical Throttle System and the Main Control Problem Statement
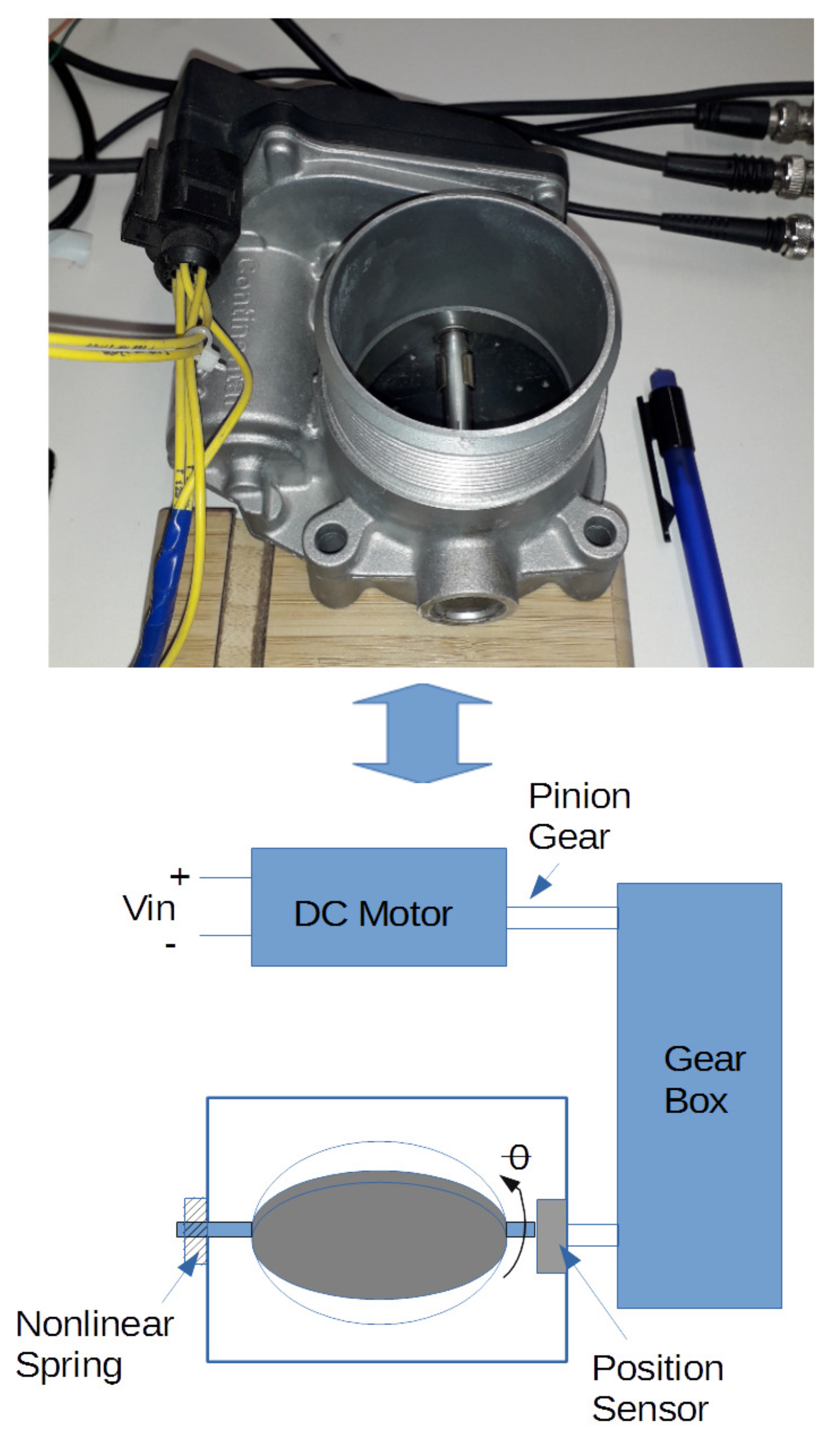
Remarks on the Mathematical Model of the Throttle Mechanism
- The throttle mechanical dynamic friction.
- The gearbox non-linearity disturbance.
- The complex return spring torque and non-linear behavior.
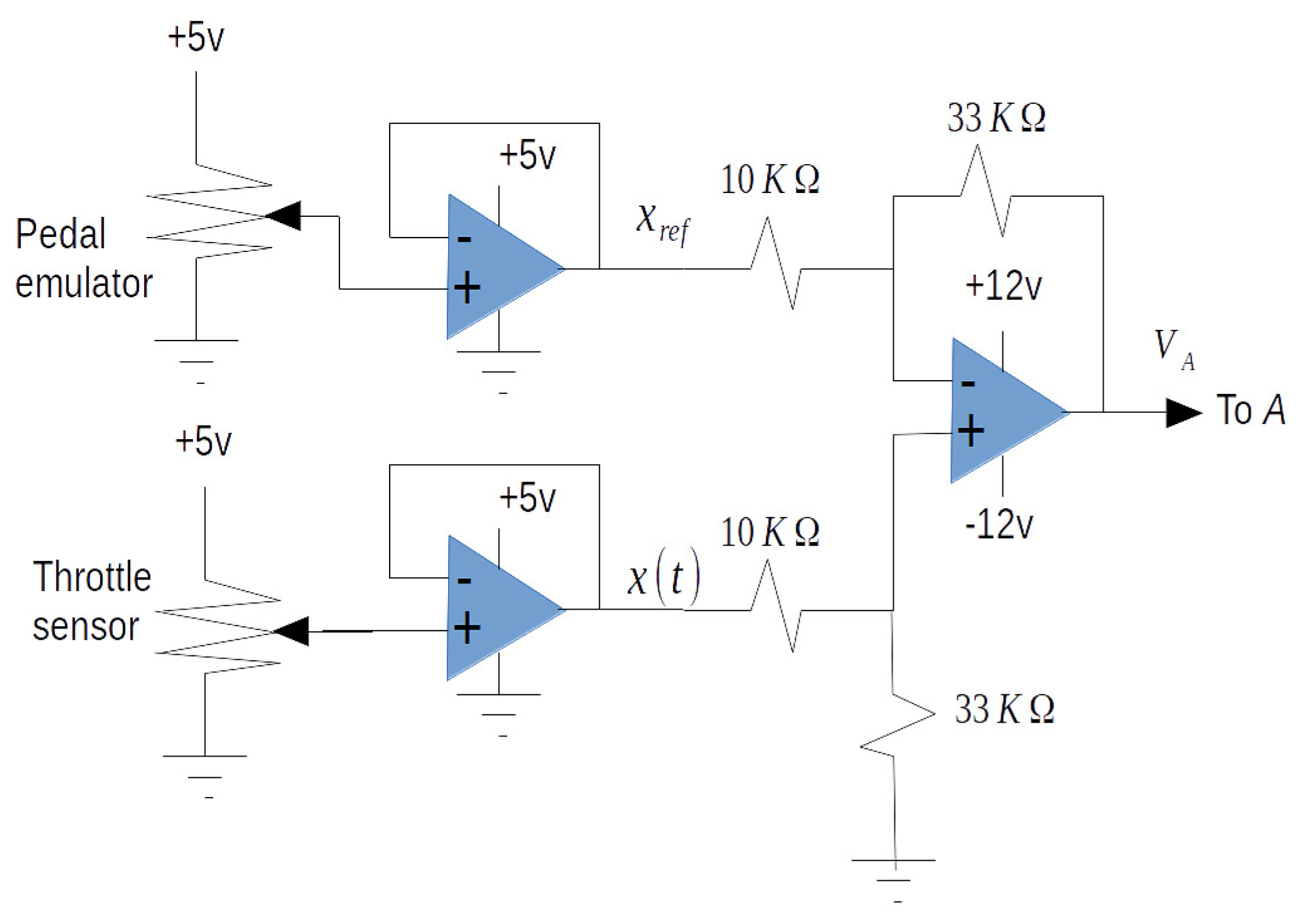
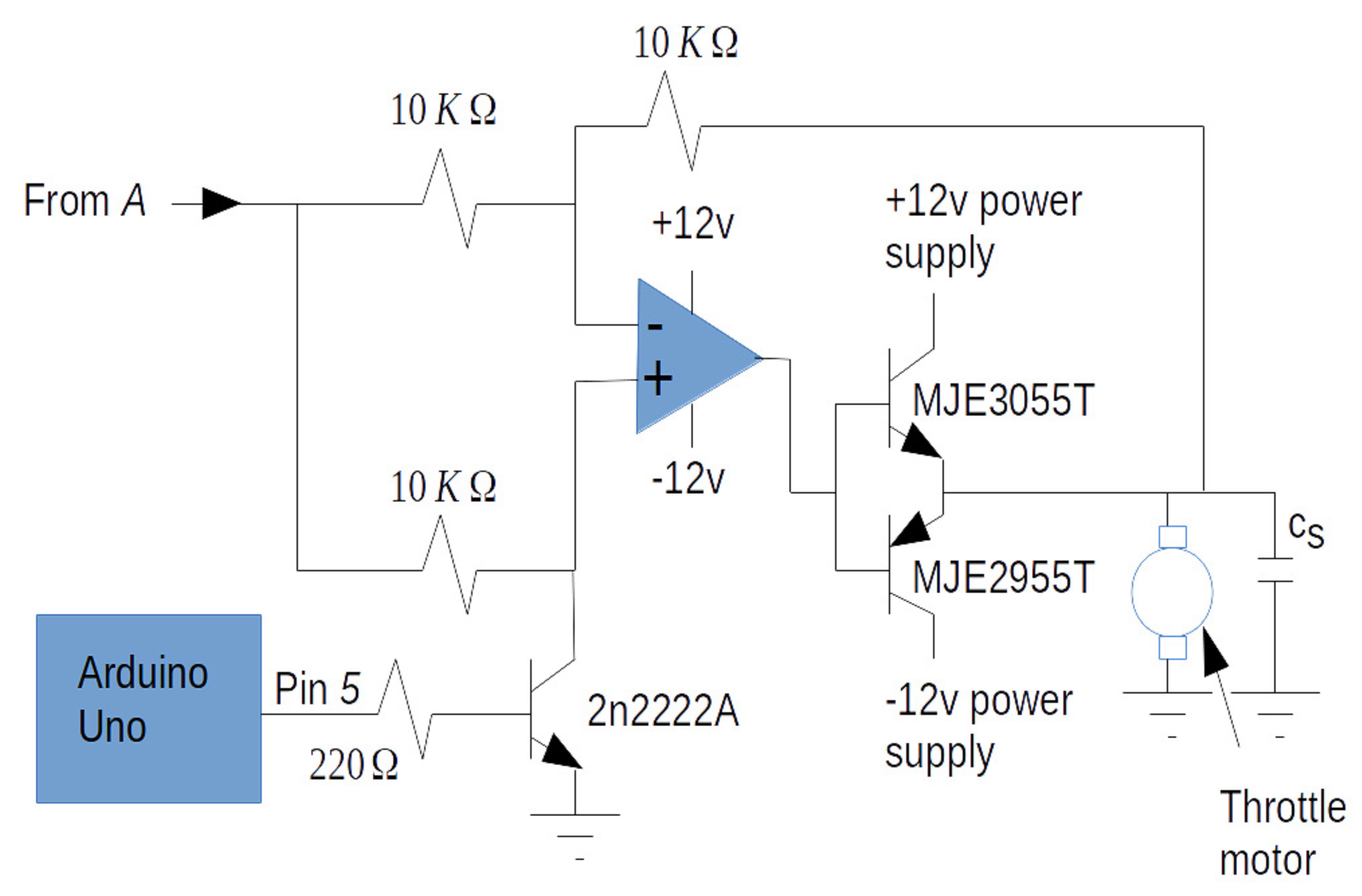
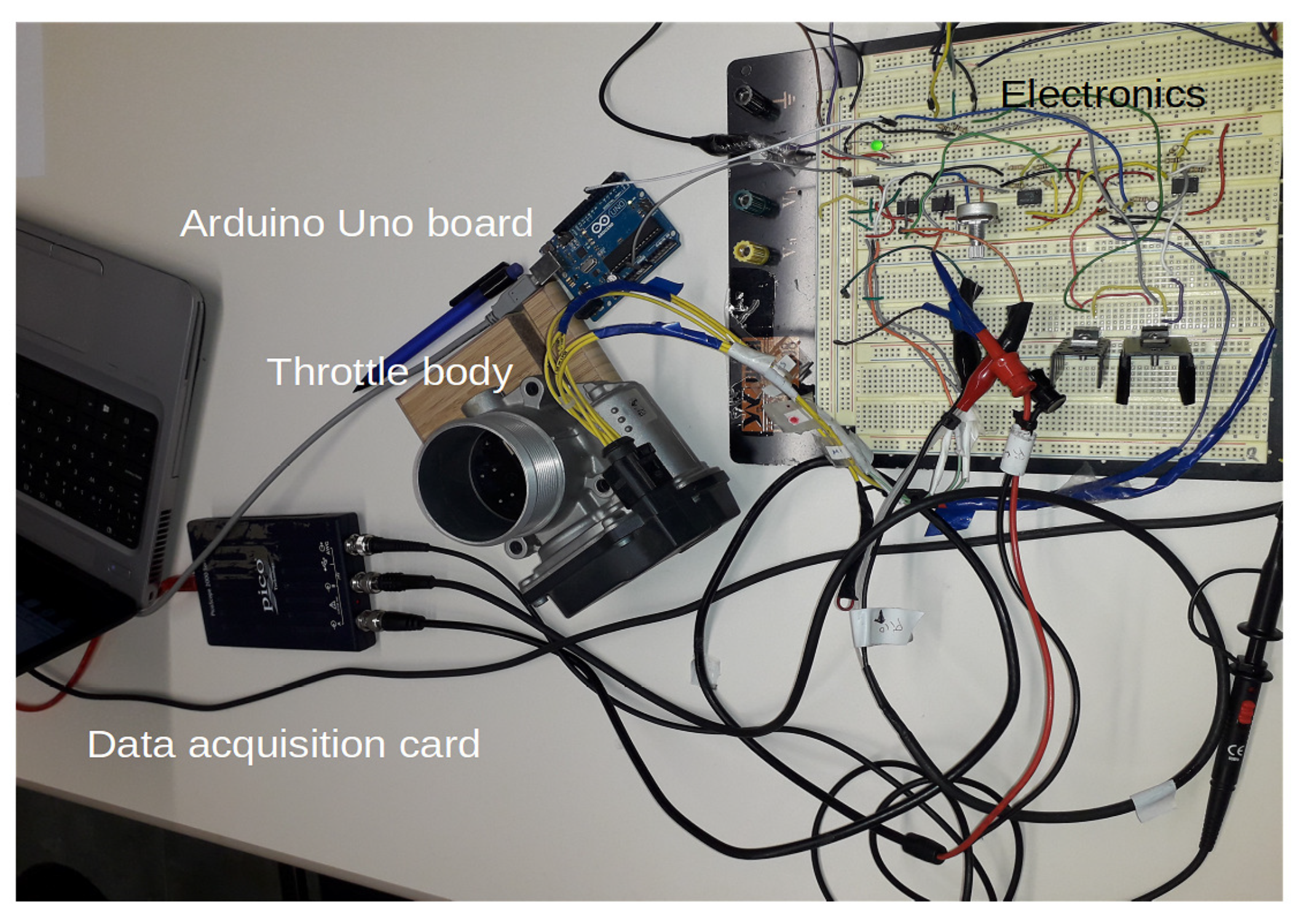
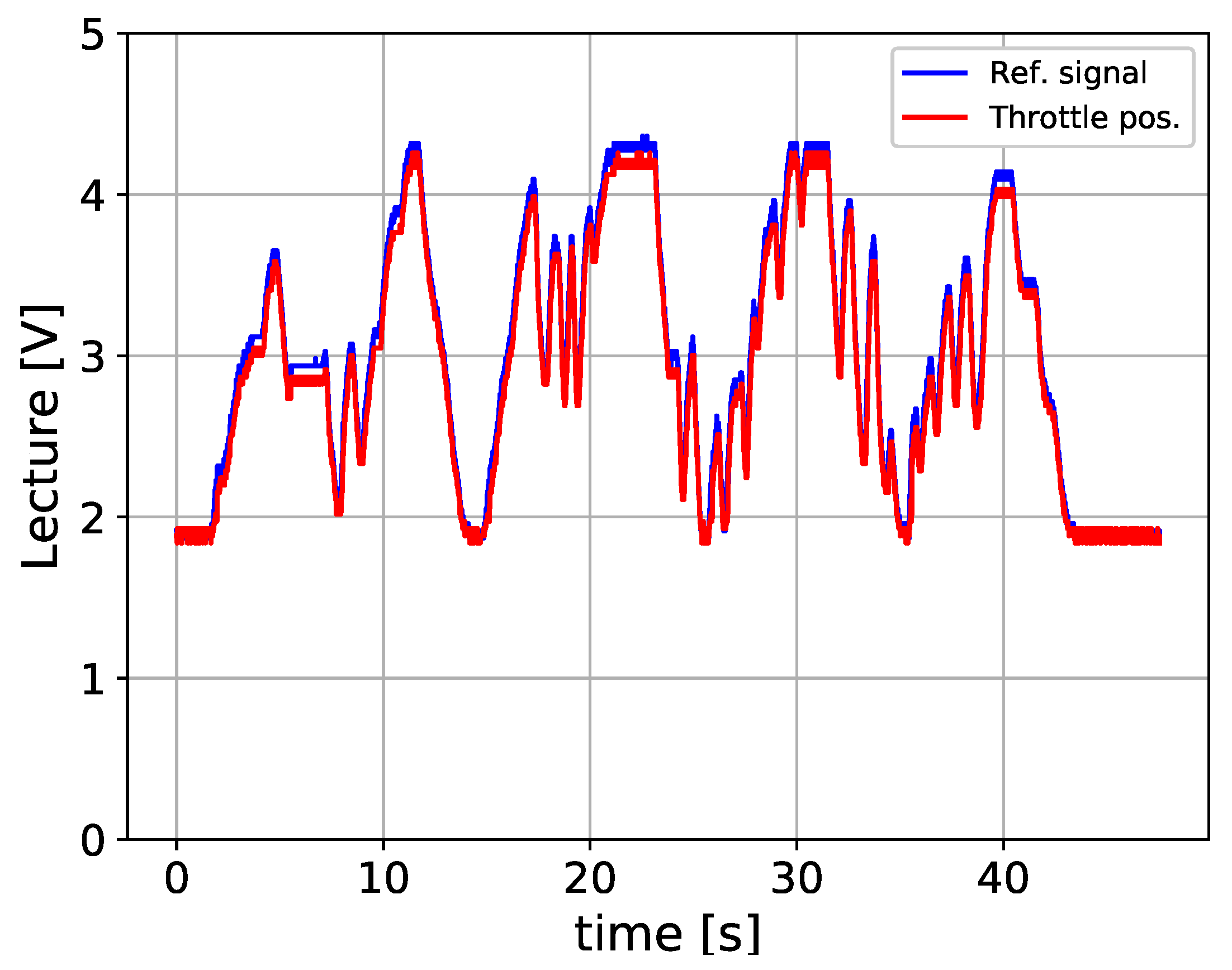
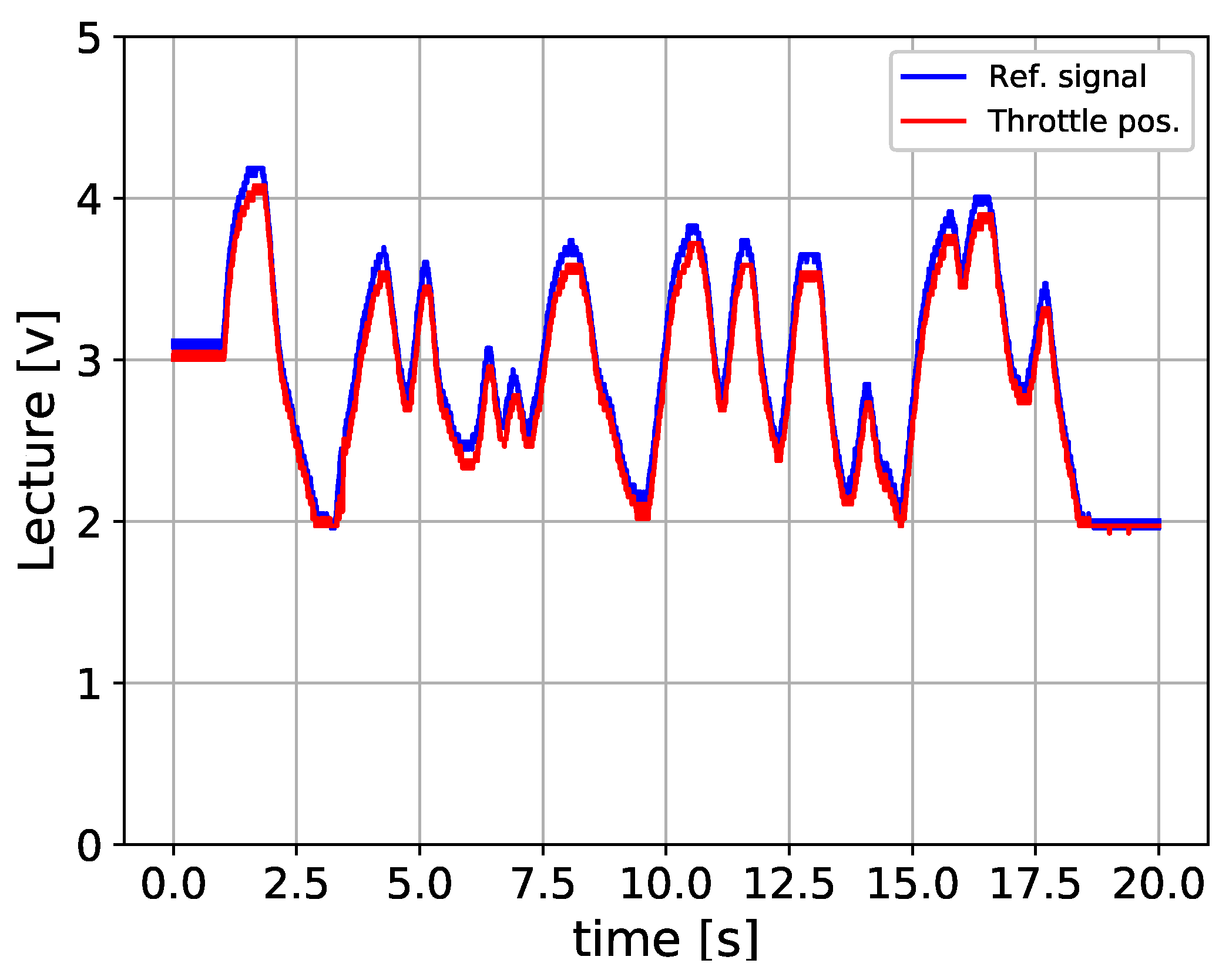
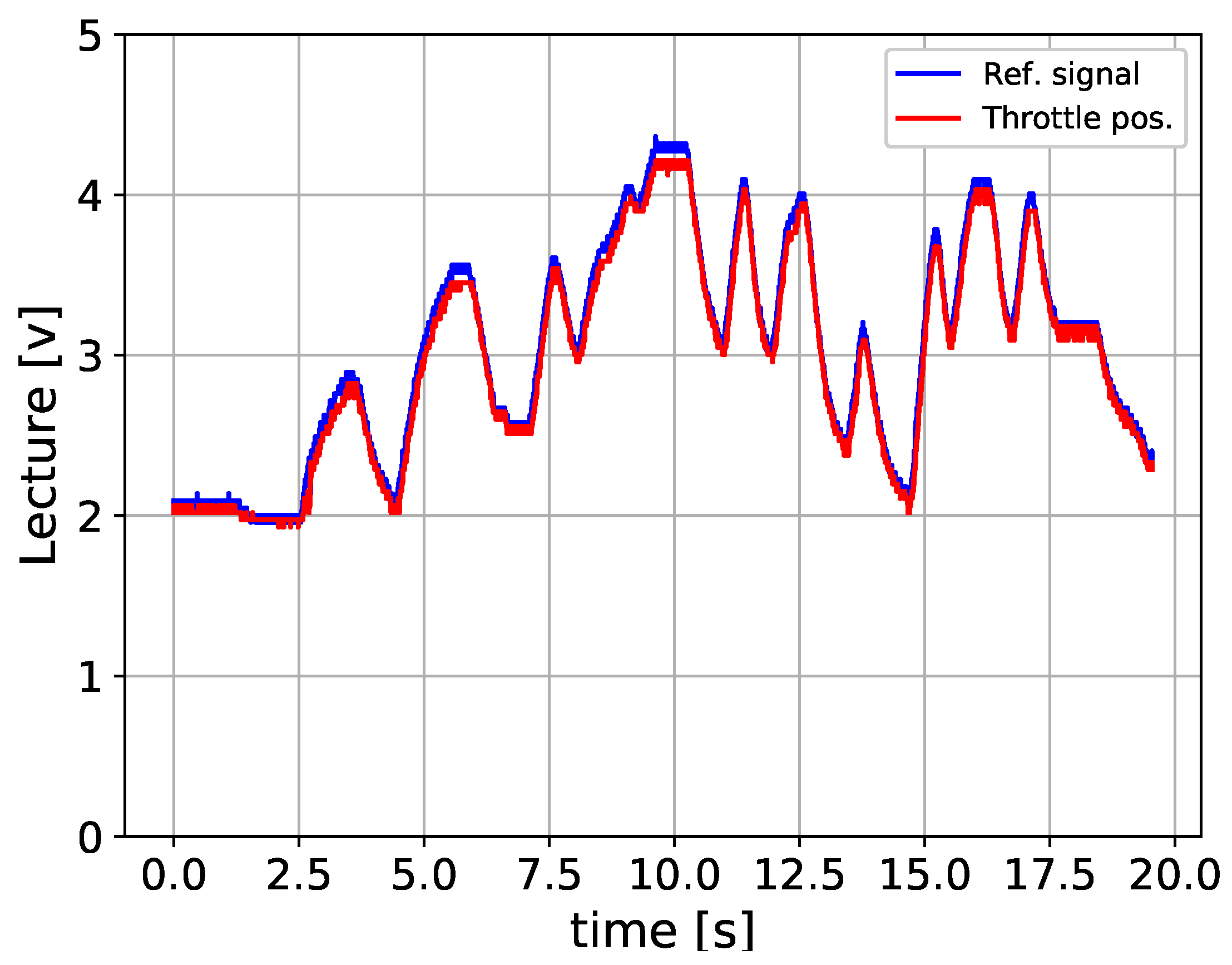
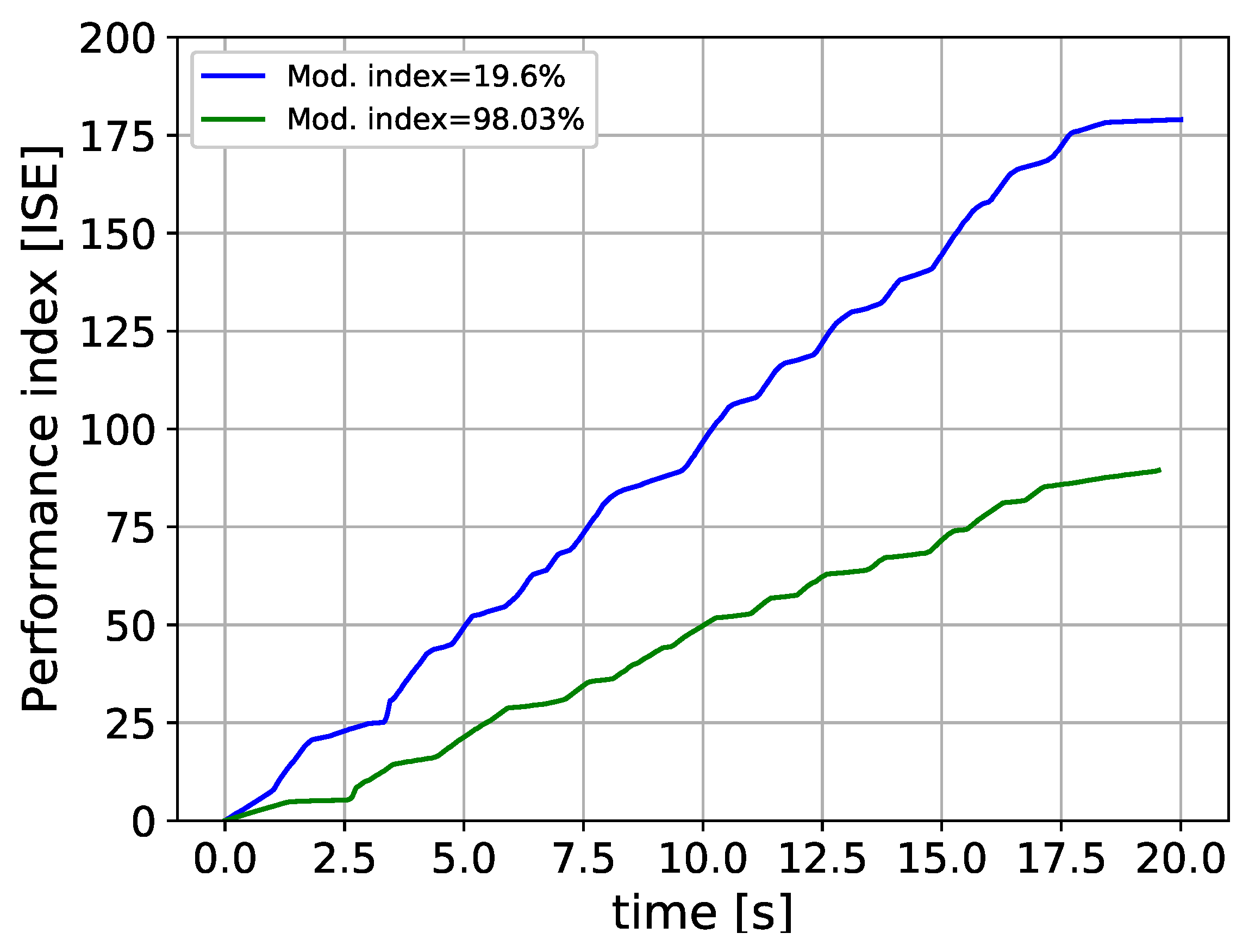
3. Electronic Control Circuit Design, Experimental Results, and Discussions
- Our control approach is well-situated for electronic realization.
- Our control design does not use a dense data flow algorithm. For instance, in [7], its basic genetic algorithm (GA) requires a fitness calculation and selecting some GA individual objects.
- Our control structure has fewer control parameters to tune. For instance, in [7], there are 14 parameters to adjust.
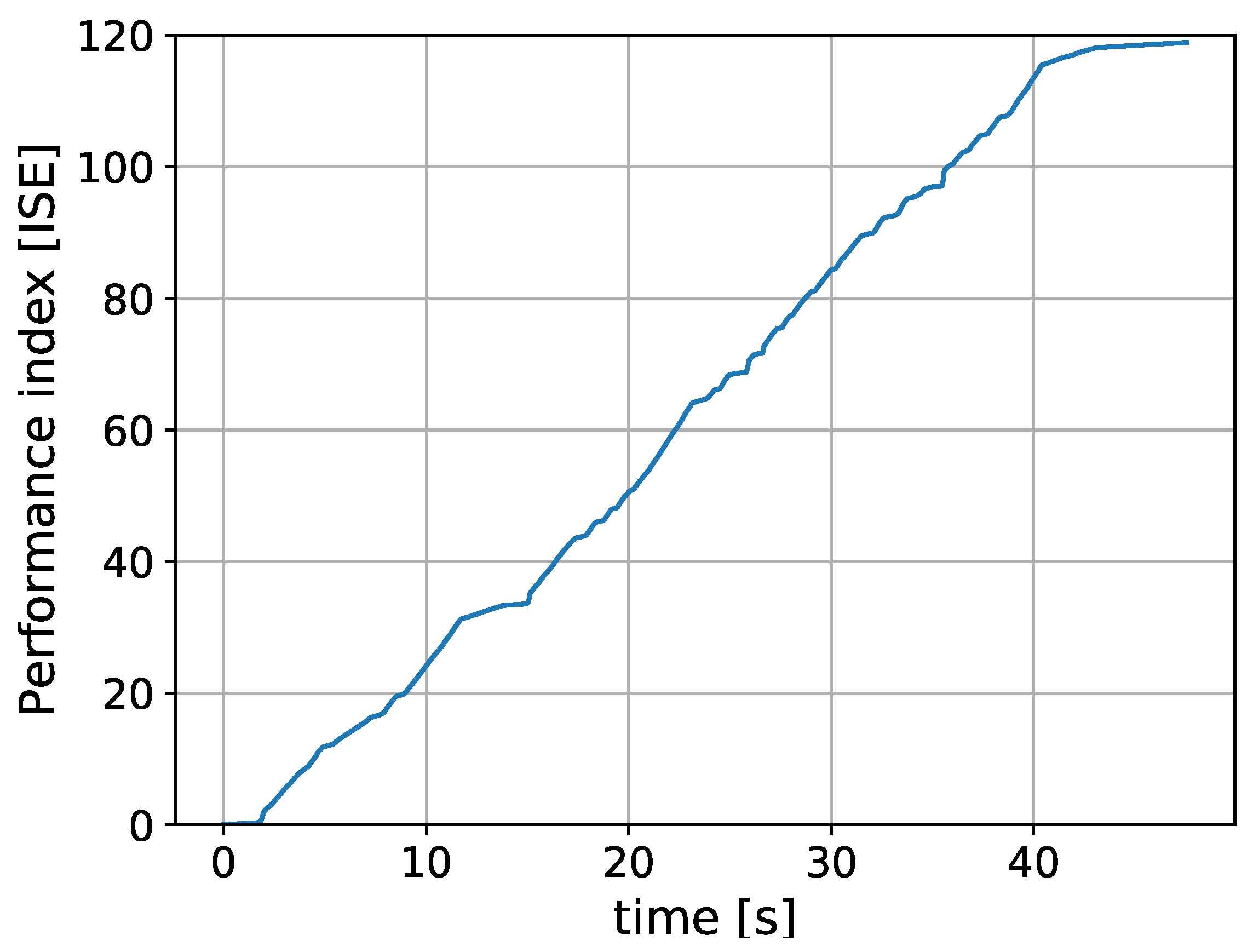
- In [7], the next performance index on the tracking error during the experiment-time action can be read as:However, in other experiments realized in [7], this error was about Rad. In our case, we have:The above number could be a disadvantage of our control design. However, a human outer-control loop exists in real automotive control driving to overcome this disadvantage.
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liberzon, D. Switching in Systems and Control; Springer Science & Business Media: New York, NY, USA, 2003. [Google Scholar]
- Skafidas, E.; Evans, R.J.; Savkin, A.V.; Petersen, I.R. Stability results for switched controller systems. Automatica 1999, 35, 553–564. [Google Scholar] [CrossRef]
- Zhai, G.; Hu, B.; Yasuda, K.; Michel, A.N. Piecewise Lyapunov functions for switched systems with average dwell time. Asian J. Control 2000, 2, 192–197. [Google Scholar] [CrossRef]
- Zhai, G.; Li, W.; Huang, C.; Xiao, M. Quadratic Stabilization of Uncertain Switched Affine Systems: An Observer-Based Approach. In Proceedings of the IEEE 2018 57th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Nara, Japan, 11–14 September 2018; pp. 362–367. [Google Scholar]
- Li, J.; Pan, K.; Zhang, D.; Su, Q. Robust fault detection and estimation observer design for switched systems. Nonlinear Anal. Hybrid Syst. 2019, 34, 30–42. [Google Scholar] [CrossRef]
- Xiong, J.; Sun, Z. An improved combined switching strategy for switched linear systems. In Proceedings of the 2010 IEEE 26-th Convention of Electrical and Electronics Engineers in Israel, Eliat, Israel, 17–20 November 2010; pp. 406–410. [Google Scholar]
- Ye, M.; Wang, H. A Robust Adaptive Chattering-free Sliding Mode Control Strategy for Automotive Electronic Throttle System via Genetic Algorithm. IEEE Access 2019, 8, 68–80. [Google Scholar] [CrossRef]
- Vargas, A.N.; Menegaz, H.M.; Ishihara, J.Y.; Acho, L. Unscented Kalman filters for estimating the position of an automotive electronic throttle valve. IEEE Trans. Veh. Technol. 2016, 65, 4627–4632. [Google Scholar] [CrossRef]
- Vidal Seguí, Y.; Acho Zuppa, L.; Pozo Montero, F. Robust control of an electronic throttle system via switched chattering control: Benchmark experiments. In IFAC Workshop on Engine and Powertrain Control, Simulation and Modeling; IFAC: Paris, France, 2009. [Google Scholar]
- Pujol, G.; Vidal, Y.; Acho, L.; Vargas, A.N. Asymmetric modelling and control of an electronic throttle. Int. J. Numer. Model. Electron. Netw. Devices Fields 2016, 29, 192–204. [Google Scholar] [CrossRef]
- Acho, L. A proportional plus a hysteretic term control design: a throttle experimental emulation to wind turbines pitch control. Energies 2019, 12, 1961. [Google Scholar] [CrossRef] [Green Version]
- Pavković, D.; Deur, J.; Jansz, M.; Perić, N. Adaptive control of automotive electronic throttle. Control. Eng. Pract. 2006, 14, 121–136. [Google Scholar] [CrossRef]
- Xiaofang, Y.; Yaonan, W.; Wei, S.; Lianghong, W. RBF networks-based adaptive inverse model control system for electronic throttle. IEEE Trans. Control. Syst. Technol. 2009, 18, 750–756. [Google Scholar] [CrossRef]
- Li, Y.; Yang, B.; Zheng, T.; Li, Y.; Cui, M.; Peeta, S. Extended-state-observer-based double-loop integral sliding-mode control of electronic throttle valve. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2501–2510. [Google Scholar] [CrossRef]
- Muske, K.R.; Jones, J.C.P.; Franceschi, E. Adaptive analytical model-based control for SI engine air–fuel ratio. IEEE Trans. Control. Syst. Technol. 2008, 16, 763–768. [Google Scholar] [CrossRef]
- Sheng, W.; Bao, Y. Fruit fly optimization algorithm based fractional order fuzzy-PID controller for electronic throttle. Nonlinear Dyn. 2013, 73, 611–619. [Google Scholar] [CrossRef]
- Honek, M.; Wojnar, S.; Simoncic, P.; Rohar-Hkiv, B. Control of electronic throttle valve position of SI engine. In Proceedings of the International Conference February, Vyšná Boca, Slovak, 10–13 February 2010; Volume 10, p. 13. [Google Scholar]
- Jiao, X.; Zhang, J.; Shen, T. An adaptive servo control strategy for automotive electronic throttle and experimental validation. IEEE Trans. Ind. Electron. 2014, 61, 6275–6284. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, H. Robust tracking control for vehicle electronic throttle using adaptive dynamic sliding mode and extended state observer. Mech. Syst. Signal Process. 2020, 135, 106375. [Google Scholar] [CrossRef]
- Baotic, M.; Vasak, M.; Morari, M.; Peric, N. Hybrid system theory based optimal control of an electronic throttle. In Proceedings of the 2003 IEEE American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 5209–5214. [Google Scholar]
- Guerra, R.; Acho, L.; Aguilar, L. Adaptive friction compensation for mechanisms: A new perspective. Int. J. Robot. Autom. 2007, 22, 155–159. [Google Scholar] [CrossRef]
- Guerra, R.; Acho, L. Adaptive friction compensation for tracking control of mechanisms. Asian J. Control 2007, 9, 422–425. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PWM Frequency [Hz] | PWM Duty Cycle [%] | ISE |
|---|---|---|
| 976.56 | 86.27 | 119.5 |
| 7812.50 | 19.6 | 178.6 |
| 7812.50 | 98.03 | 88.8 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Acho, L.; Pujol-Vázquez, G.; Gibergans-Báguena, J. A Recent Electronic Control Circuit to a Throttle Device. Electronics 2020, 9, 191. https://doi.org/10.3390/electronics9010191
Acho L, Pujol-Vázquez G, Gibergans-Báguena J. A Recent Electronic Control Circuit to a Throttle Device. Electronics. 2020; 9(1):191. https://doi.org/10.3390/electronics9010191
Chicago/Turabian StyleAcho, Leonardo, Gisela Pujol-Vázquez, and José Gibergans-Báguena. 2020. "A Recent Electronic Control Circuit to a Throttle Device" Electronics 9, no. 1: 191. https://doi.org/10.3390/electronics9010191