2. Solar-Powered HAP Energy Ecosystem
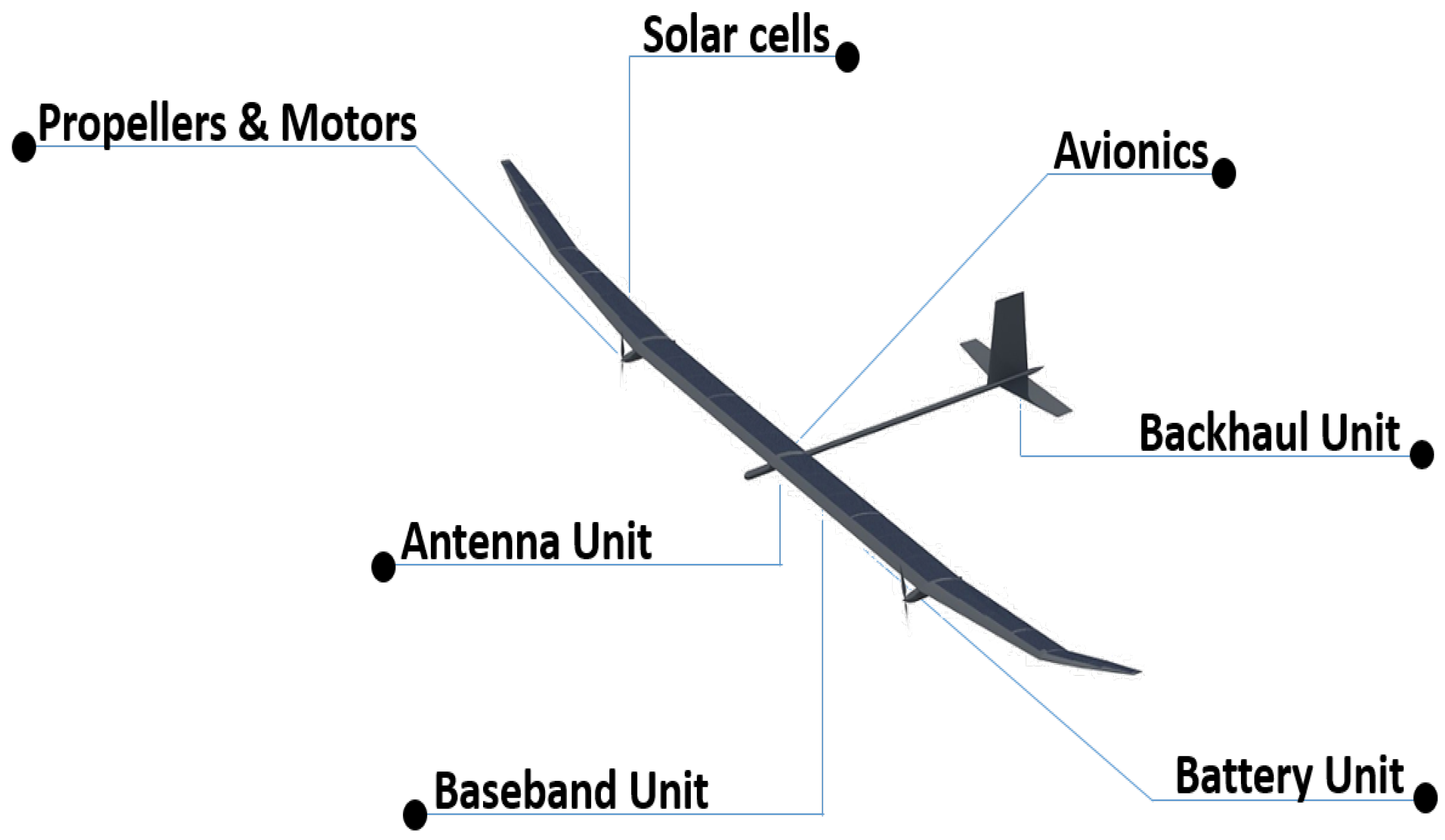
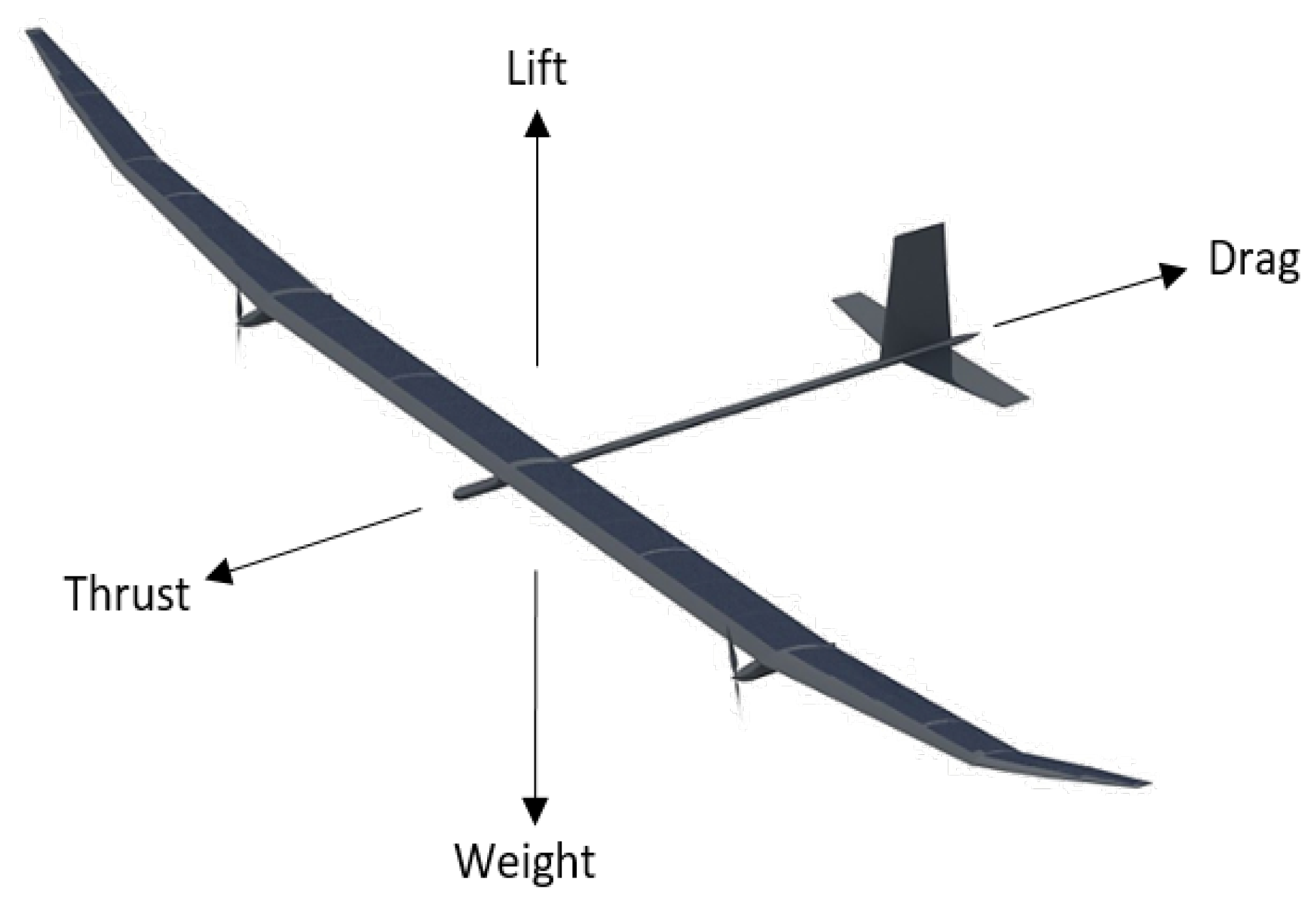
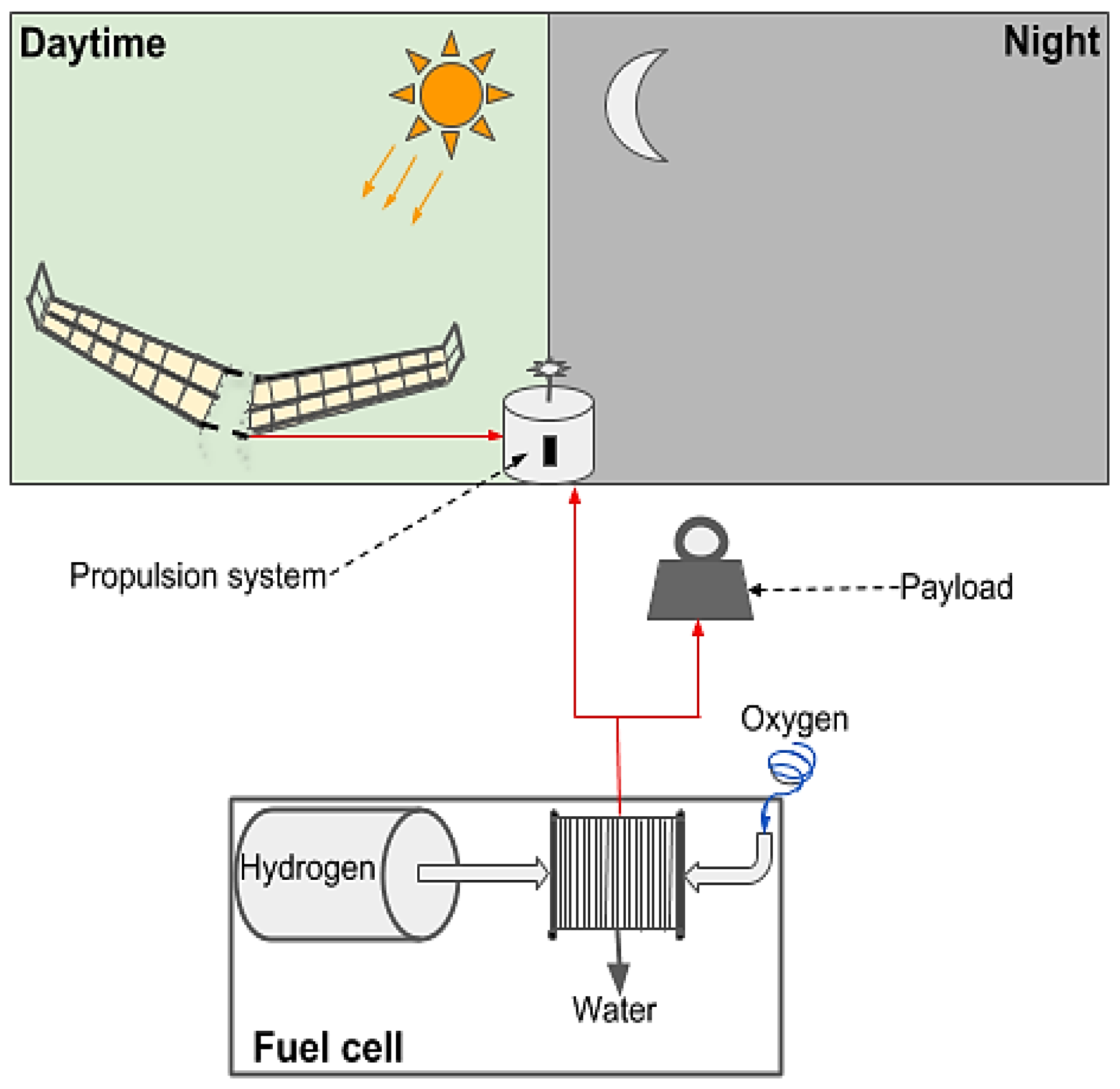
The major components of a HAP energy ecosystem are shown in
Figure 1. The total energy that can be harvested is limited by the aircraft wing area which limits the solar cell area in order not to undermine the aeronautical design integrity of the aircraft [
8]. The energy consumption on the other hand involves the platform propulsion system, avionics and payload. Consumption by the propulsion system is affected by factors including payload and platform weight. The baseband, RF, antenna, energy storage and backhaul units all contribute to the payload weight, while the platform frame and the avionics system contribute to the platform weight. The feasibility of the aircraft is not significantly affected by the weight of the solar cells [
8] especially as high efficiency ultra-thin solar cells are already commercially available.
For the backhaul network, free space optical (FSO) and mmWave technologies can potentially be used. The choice depends on the compromise between the weight and the required data rate. The antenna unit comprises of antenna arrays operating at V-band frequencies (e.g., 47/48 GHz allocated for HAPs by the ITU-R [
21]), which are expectedly small in size compared to other components in the ecosystem. A typical implementation of a HAP backhaul network at V-band frequency can therefore integrate the RF, BBU and antenna functionalities in a single unit.
The modularity of the components in the ecosystem is important for multi-mission solutions that require minimal reconfiguration for each mission. In [
22], the authors propose an architecture for the electrical power system of a UAV, which separates the power system into solar module, battery module and payload module. This allows for scalability if the modules are properly designed. The Solar and energy storage modules, which are some of the main components of the solar-powered HAP energy ecosystem, are briefly discussed below:
Ultra-thin solar cells—Single crystalline based solar cell technology has been used over the years. The cost of silicon Si, which dominates single crystalline based solar cells, catalysed the studies for alternatives. This resulted in two-compound technologies like Gallium Arsenide (GaAs). Thin film solar cells are a good technology for weight limited HAP applications. Different technologies like the ultra-thin crystalline silicon (c-Si) [
23] have also been used to produced ultra-thin solar cells. Unfortunately, c-Si suffer from other factors such as poor light absorption.
Energy Storage—The most common energy storage systems proposed for HAPs are batteries and fuel cells. Typical examples of these systems usable in solar-powered HAPs are Lithium-Sulphur (Li-S) batteries and hydrogen fuel cells (HFC). The ideal storage system for a given mission depends on location, platform characteristics, weight, specific energy and system deployment scenario, etc. Some commercially available systems such as Zephyr-S use Li-S battery storage. Presently, battery-based storage systems are often the limiting factor for long-endurance wireless communication missions given the current state-of-the-art in battery technology and the weight constraints of HAPs. Alternatively, HFCs with significantly higher specific energy present a more feasible energy storage system. HFCs can provide continuous energy in the presence of hydrogen fuel, and a conventional HFC does not require charging. Adequate power for a given application is delivered by an appropriate stack of HFCs [
24]. The technology has been researched over the years and has been used in space missions. In [
25], the optimal sizing of a photovoltaic/hydrogen system ideal for HAP applications is proposed using a particle swarm optimizer (PSO).
The energy storage system is an essential component in solar-powered aircraft-based HAP and must be critically considered for any application. Since continuous operation of the wireless communication system is required, an adequate amount of energy is required for night-time operation especially. This can potentially increase the required energy storage weight which means a larger wingspan is needed. Therefore, appropriate sizing of the storage system can allow for the use of a smaller aircraft and an increase in mission endurance. It is shown in [
26] that the maximum achievable mission endurance can be increased by methodically sizing the battery system. In [
25], studies show that optimal sizing of a photovoltaic HFC increases the efficiency of the energy system. Lee et al. [
27] apply an active power management method, which determines the power output for aerial vehicles powered by solar cells, fuel cells and batteries. The proposed method facilitates adequate power supply during the continuously changing flight conditions, keeping power sources within their proper operational bounds. In general, effective energy management strategies can ensure better energy system performance of a solar-powered aircraft-based HAP. This can involve path planning by allowing the aircraft to climb to a maximum altitude during sunrise, storing energy and gliding after sunset as studies [
6,
8,
25] show. However, this will undoubtedly increase the complexity of the communication system, as adequate compensation for the increased propagation loss at the maximum height needs to be taken into consideration. However, the total collected energy can be increased significantly by ensuring that the sun’s rays are perpendicular to the cell surface. The efficiency of some of the components of the energy management system, which includes MPPT, power converter, battery management, etc., is beyond the scope of this work. However, they have to be considered in practical systems. A number of mathematical symbols, which are defined in
Table A1 in the
Appendix A, are used in the analysis in this paper.
3. Energy Collection Model
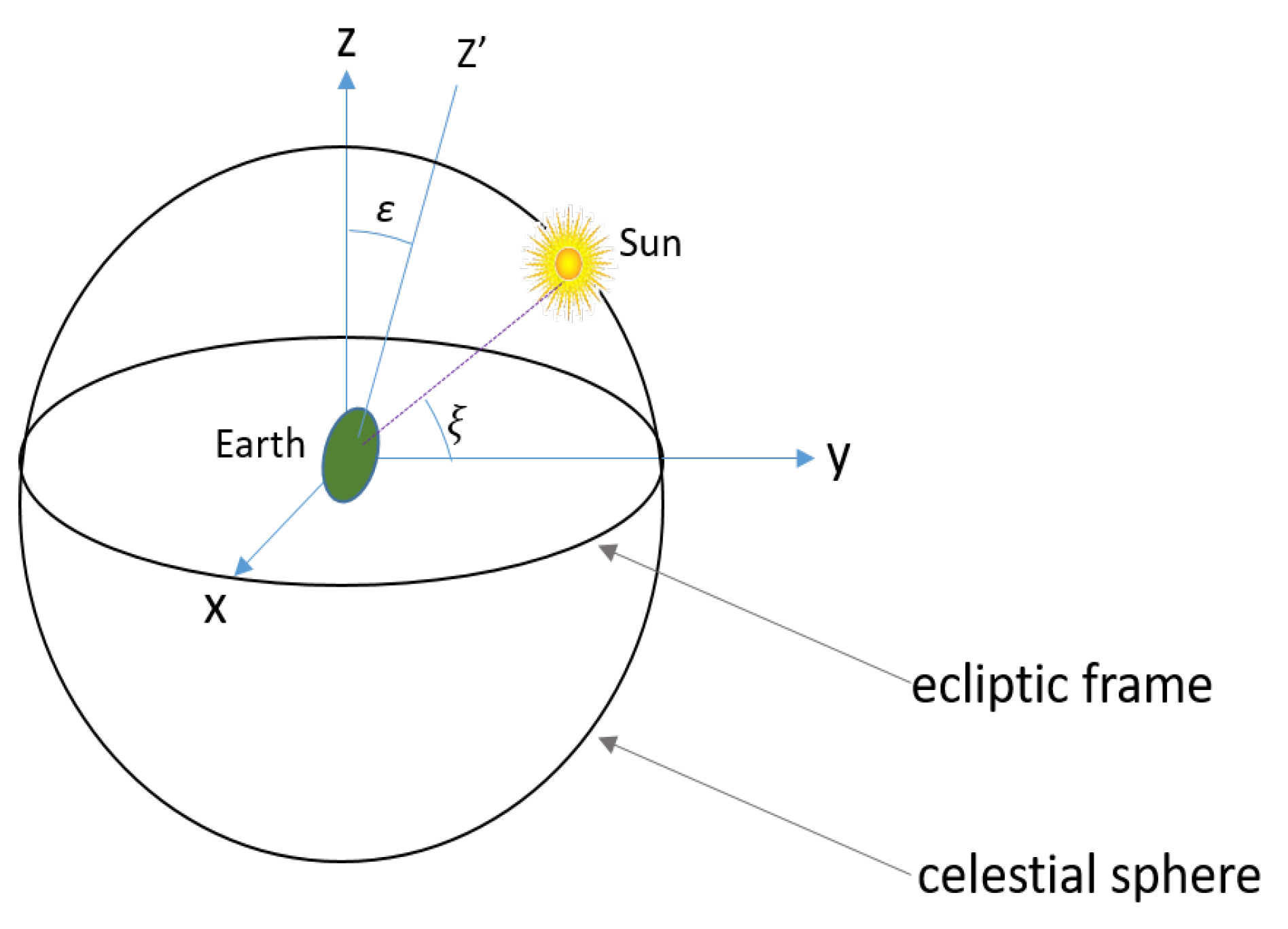
The intensity of solar radiation impinging on a horizontal surface is dependent on latitude and the position of the sun in the sky. While observing the sun from the earth, it appears to move along a great circle on the celestial sphere concentric to earth called the ecliptic as shown in
Figure 2. The celestial sphere is an imaginary sphere of an arbitrarily large radius. Realistically, the earth is rotating around an axis z’, tilted by and angle of obliquity ε = 23.44° = 0.4093 with respect to the ecliptic frame [
28]. On the ecliptic frame, the sun’s latitude is
.
The solar radiation detected above the atmosphere is referred to as extra-terrestrial solar radiation. This is higher than that detected at the surface of the earth because of gaseous and water vapour absorption of radiation at some wavelengths in the atmosphere. Fortunately, in stratosphere, the amount of water vapour is less than
of the amount on the Earth’s surface [
17]. The expression for the instantaneous extra-terrestrial solar intensity,
is given as follows [
25]:
where
= 1366.1 W/m
is a standard solar constant at zero air mass defined by American Society Testing and Materials ASTM E490,
is the solar declination angle, which is a function of day
d of the year,
L is the latitude and
h is the solar hour angle.
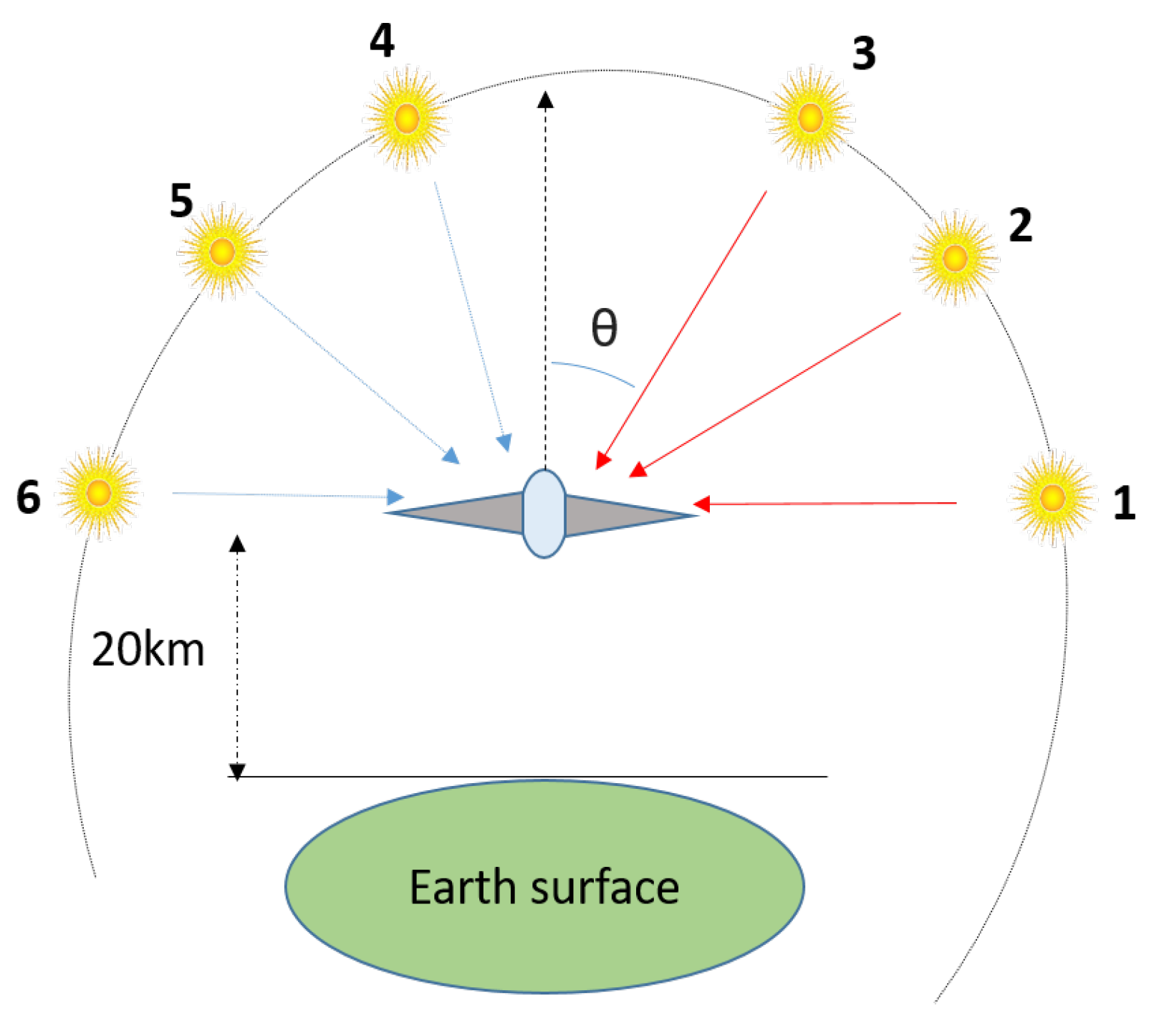
Assuming that the HAP is maintained horizontally throughout its mission duration, the solar irradiance on a plane horizontal to the surface of the earth is the sum of the direct, diffuse and reflected components of the solar radiation intensity. In the stratosphere, with very low levels of aerosols and water vapour resulting in a negligible probability of scattering, the Rayleigh distributed diffuse components can be neglected. It is assumed that the solar cells are deployed on the parts of the platform facing the sky, hence the reflected component is also neglected. Therefore, only the direct component is considered. Additionally, we assume that the HAP is horizontal and parallel to the surface of the earth. We also assume that the sun ‘rises’ from one side of the horizontal plane with respect to the HAP and ‘sets’ on the other side of the plane as depicted in
Figure 3, the sun is seen to be rising at position 1, its trajectory is depicted in between its setting position at 6. Note that the motion of the sun is continuous, and the numbering is just for clarity. The angle
is the solar zenith angle, which is a function of the position of the sun. It is important to note that the sun never really gets to an elevation angle of
−
, zenith angle of
) in most cases. This only occurs occasionally at the equator.
The radiation intensity given in Equation (
1), which is a function of the solar hour angle requires computation of the intensity at any particular time, and the solar hour angle must be known. This increases the necessary computations. To simplify, it is assumed that the maximum radiation intensity
that can be experienced at any latitude is detected at the equator at solar noon (i.e., hour angle,
) and given as
where the solar declination angle
expressed as a function of day of the year [
26] is given in radians as
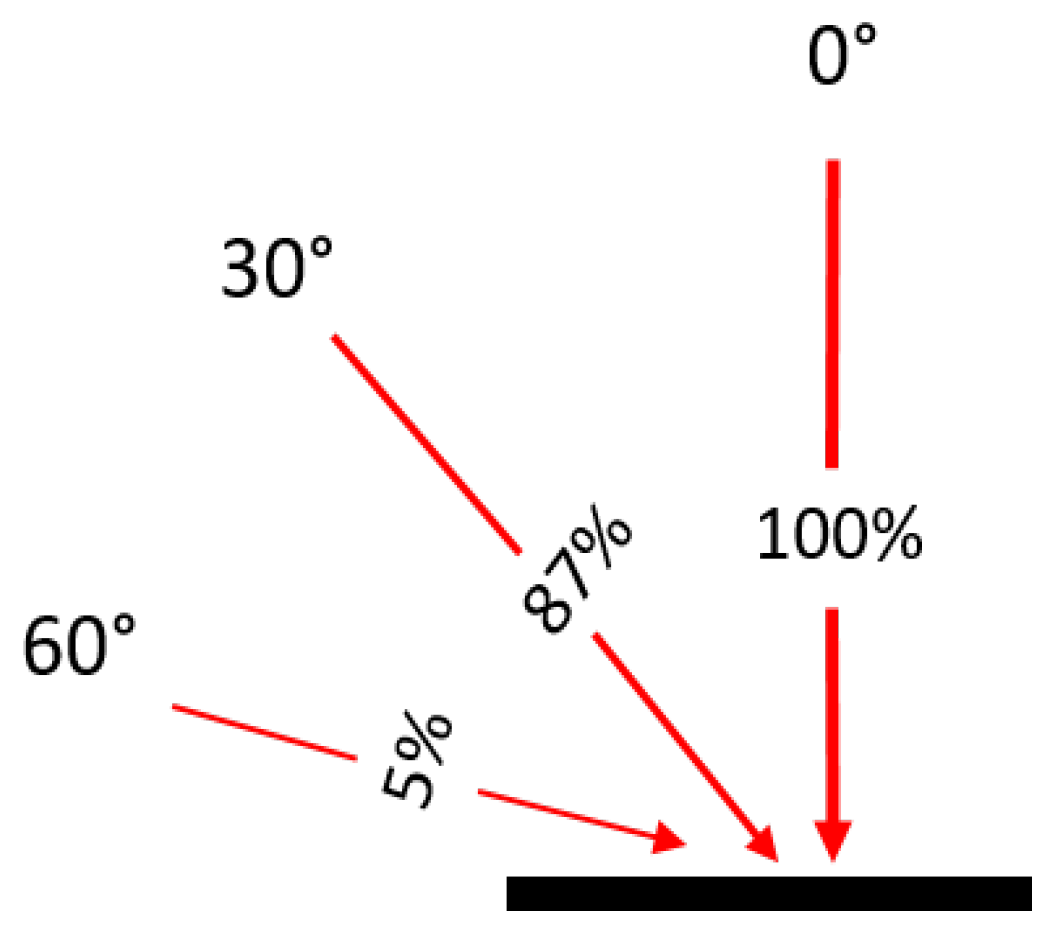
Introducing Lambert’s cosine law (which states that the irradiance measured on a plane will vary with respect to the cosine of the angle between the optical axis of the source and normal to the detector (see
Figure 4)), combining (1) and (2), the following is obtained:
where
is the elevation angle of the sun.
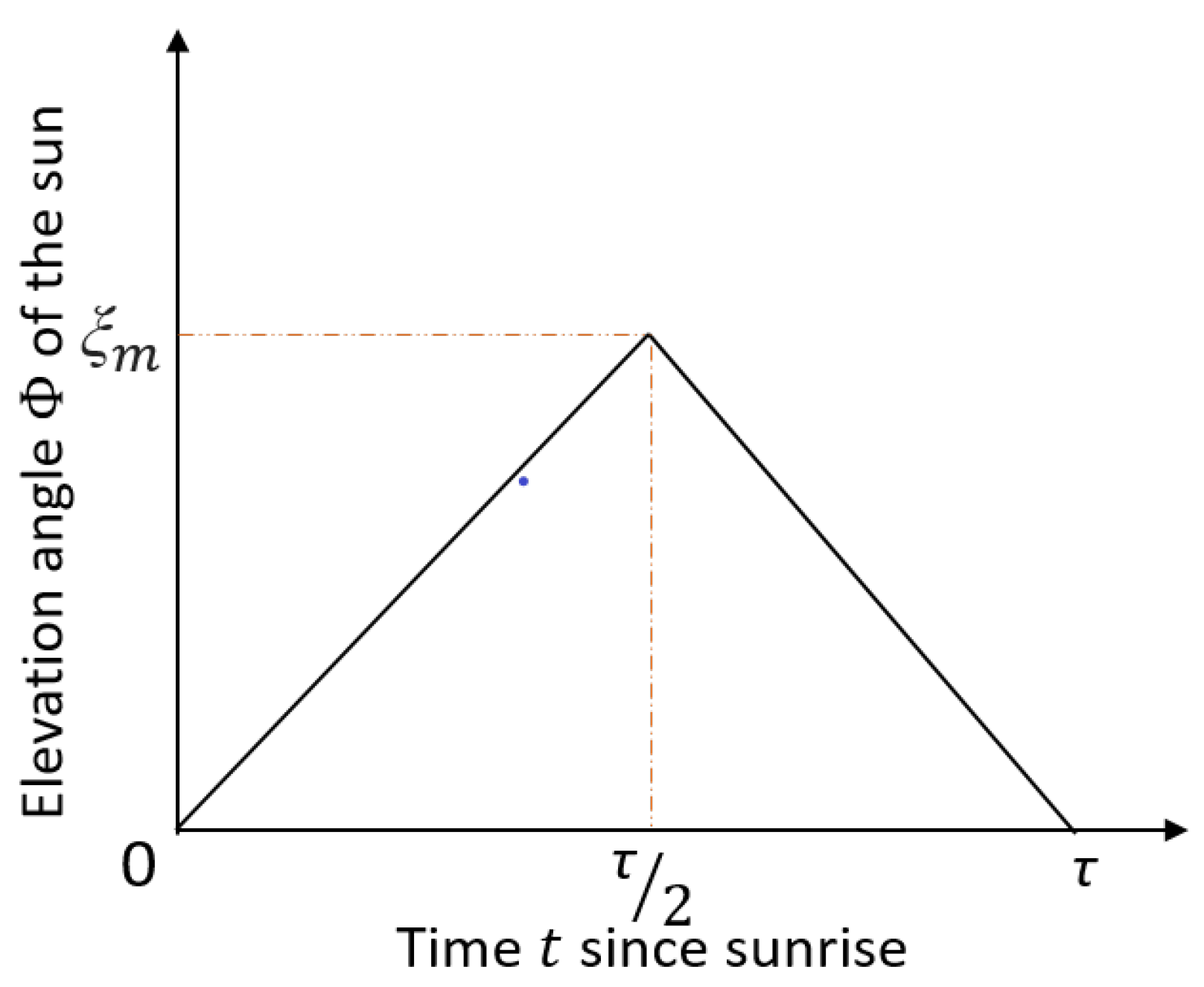
The radiation intensity of the sun varies with the incidence angle on the plane of the platform, while the total energy collected on a given day of the year is also dependent on the number of daylight hours. The total irradiance per m
on a given day is collected between sunrise and sunset. Since the elevation angle, as observed at the HAP, varies with time resulting in a varying solar radiation intensity, the sun’s elevation angle as a function of time duration since sunrise on a typical day, which can be referred to as elevation angle time series function, is defined. An approximate elevation angle time series is derived to facilitate the formulation of an expression to calculate the total solar irradiance per m
on a given day. In deriving the elevation angle time series function for a typical day, we assume that at sunrise the elevation angle as observed from the HAP is zero (i.e., the sun is in line with the HAP) and that the sun’s elevation angle is consistently increasing afterwards. There is a direct proportionality between time duration since sunrise
t and the elevation angle at that particular duration
. For instance, if sunrise is 6.00 a.m., then
at this time, while 8.00 a.m.
h. The elevation angle continues increasing slowly with
t until noon at which point the maximum elevation angle for the day has been attained. The elevation angle then starts decreasing at a similar rate until sunset when it equals zero. This results in a triangular elevation angle time series function given in (
5) and
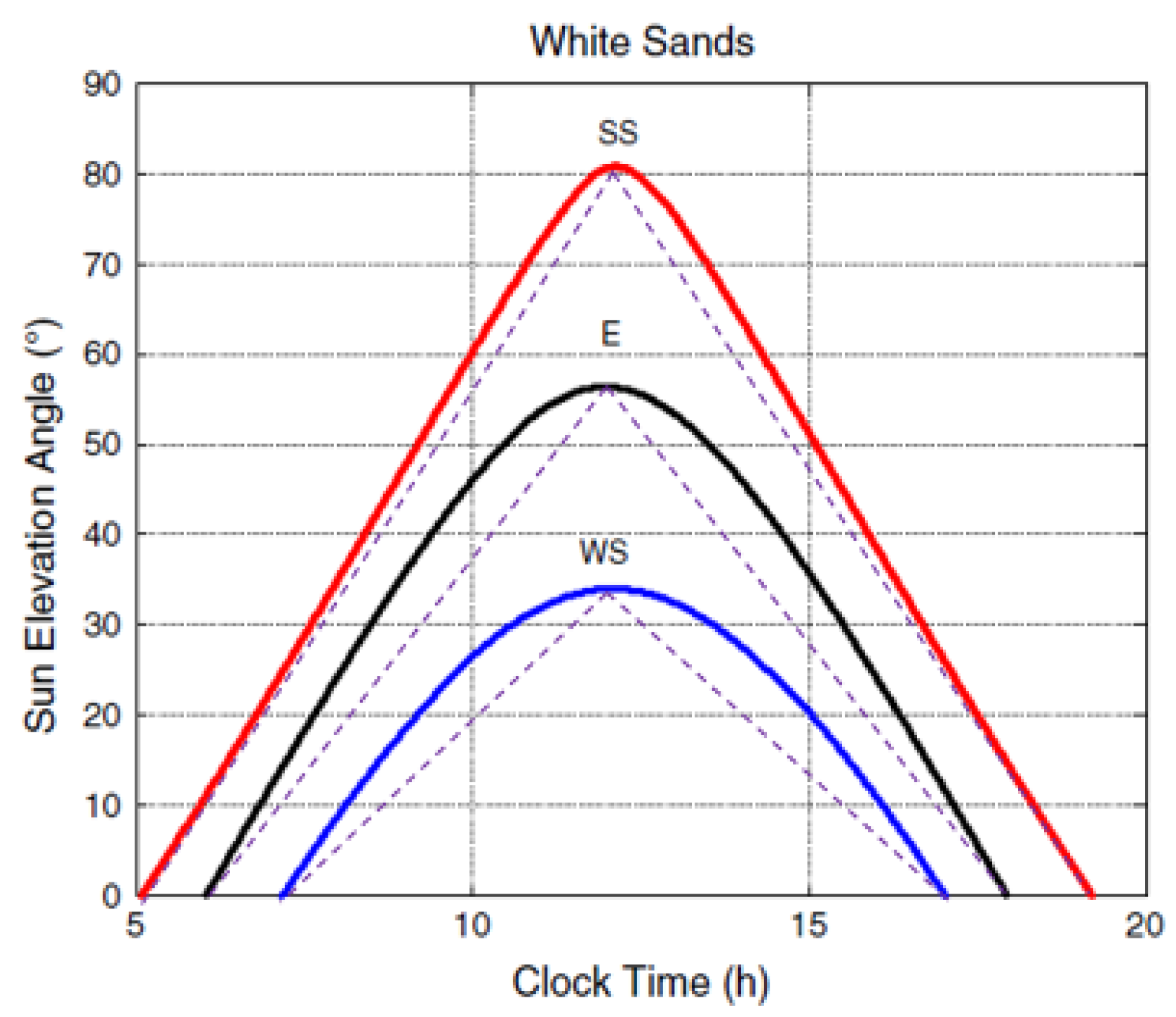
Figure 5. Actually, Matricciani in [
29] show that the elevation angle time series heuristically determined for some select days in a year is not exactly represented by a triangular function. Matricciani shows that elevation angle time series function is almost parabolic in shape. However, (
5) is a pessimistic approximation of the elevation angle time series. The accuracy of the function increases with increasing maximum elevation angles as depicted in
Figure 6. This is particularly significant as HAPs are expected to operate mainly in regions with high maximum elevation angle. It is important to note that the triangular function potentially leads to a point of singularity at noon. However, this does not affect total solar irradiance calculation, which is analogous to evaluating the area under the triangle. This can be achieved straightforwardly irrespective of the singularity.
The elevation angle time series function is expressed mathematically as
Substituting (5) into (4) yields
The total extra-terrestrial solar irradiance
per
on the surface of a high altitude platform at stratospheric altitude on a given day of the year at a particular latitude is therefore computed by integrating (6) over the duration between sunrise and sunset as shown below:
Integrating the triangular function over the entire range 0 –
is equivalent to integrating only half, e.g., 0 –
, and multiplying the result by 2. Therefore, (7) can be simplified as follows:
Evaluating the integral in (8) yields the expression for
, which is given in the following equation:
Using (9) requires the knowledge of the time duration
from sunrise to sunset at a particular latitude, and the maximum elevation of the sun on a given day of the year. In [
28], closed form expressions of the daylight time duration,
as a function of the azimuthal angle,
of the sun and mean anomaly
(the angular distance of the sun) are given as follows:
The following equation expresses the daylight time duration.
The maximum elevation of the sun
on a given day of the year is a function of latitude and declination angle [
28], which varies with day of the year. It can be estimated in radians using the following equation [
30]:
where
is the latitude in radians, which can be positive or negative, depending on whether it is referencing the northern or southern hemisphere, respectively.
Energy Collection Model Application
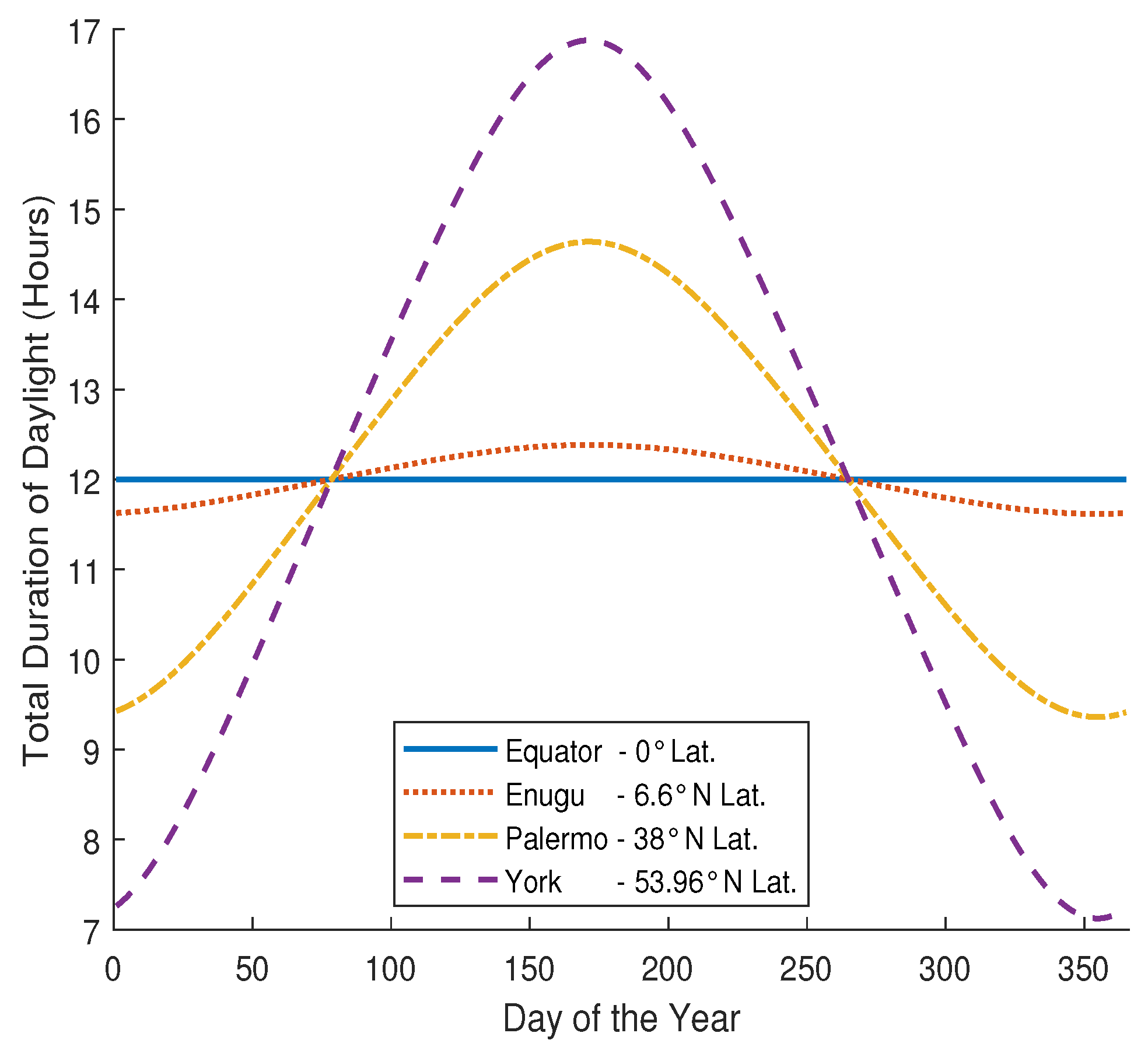
Using (10)–(13), the daylight time duration at different locations with varying latitudes over the duration of 1 year are computed and plotted as shown in
Figure 7. The locations near the equator have an approximately constant time duration of daylight from sunrise to sunset. Moving north of the equator, the longest duration of daylight is witnessed on the day of the mid-year solstice which occurs on 21st June (i.e.,
). This can be as long as 17 h of daylight in York, United Kingdom (Lat: 53.96°N) for instance. Conversely, the shortest day witnessed at all locations north of the equator occurs on the year-end solstice (i.e., 21st December,
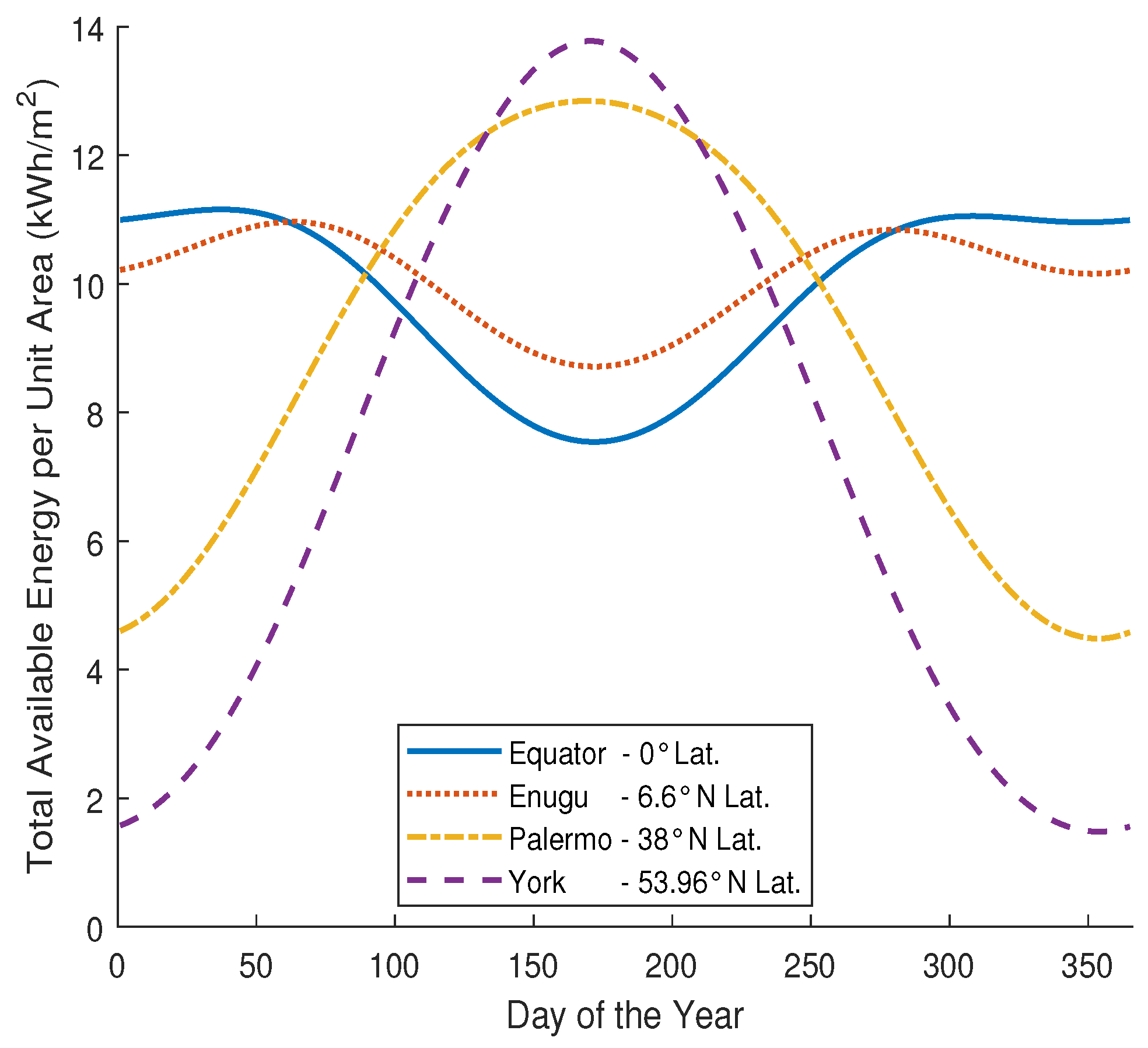
). In addition, in York for instance, this could be as short as just 7 h. The total solar irradiance per m
,
at locations as in
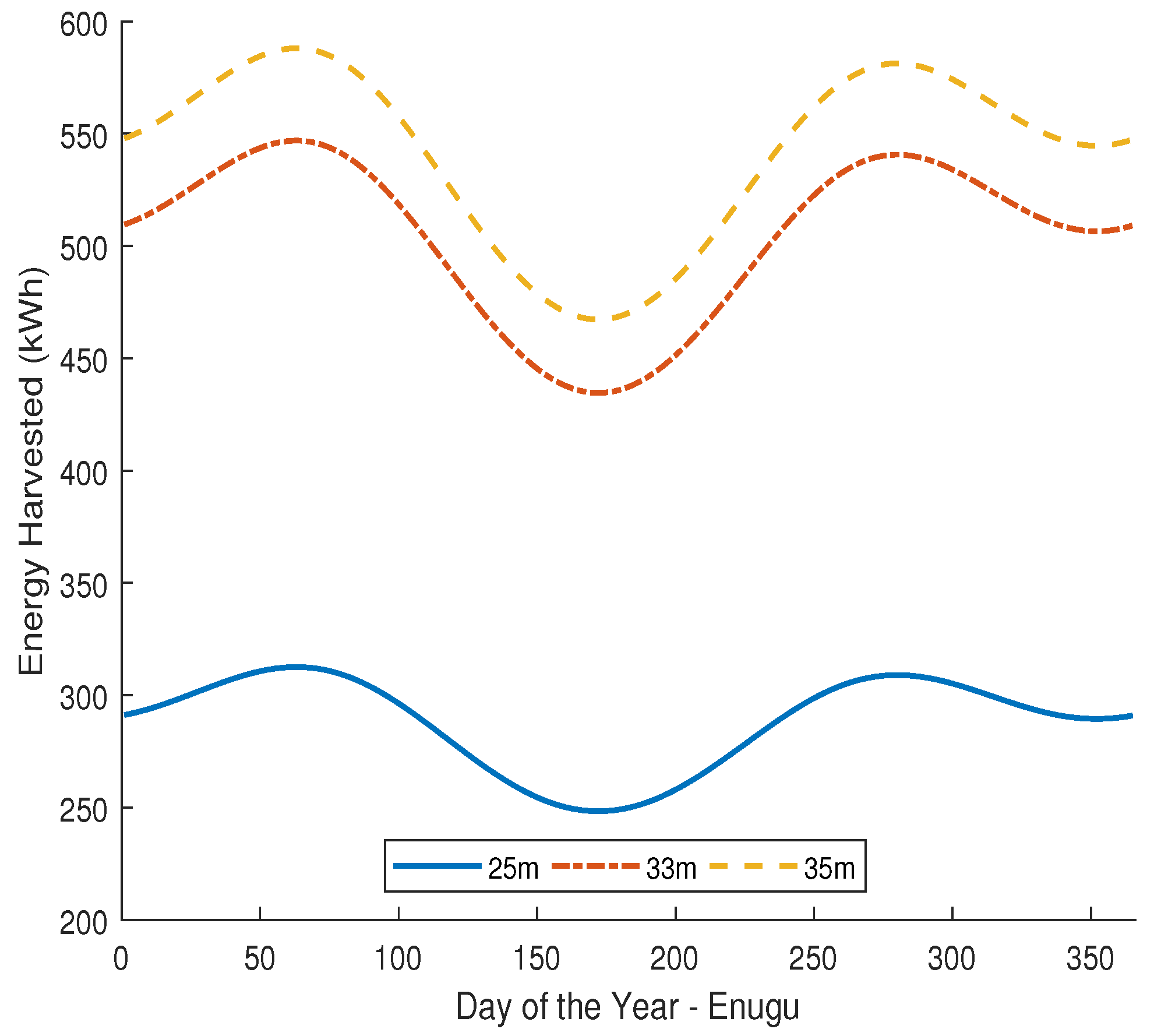
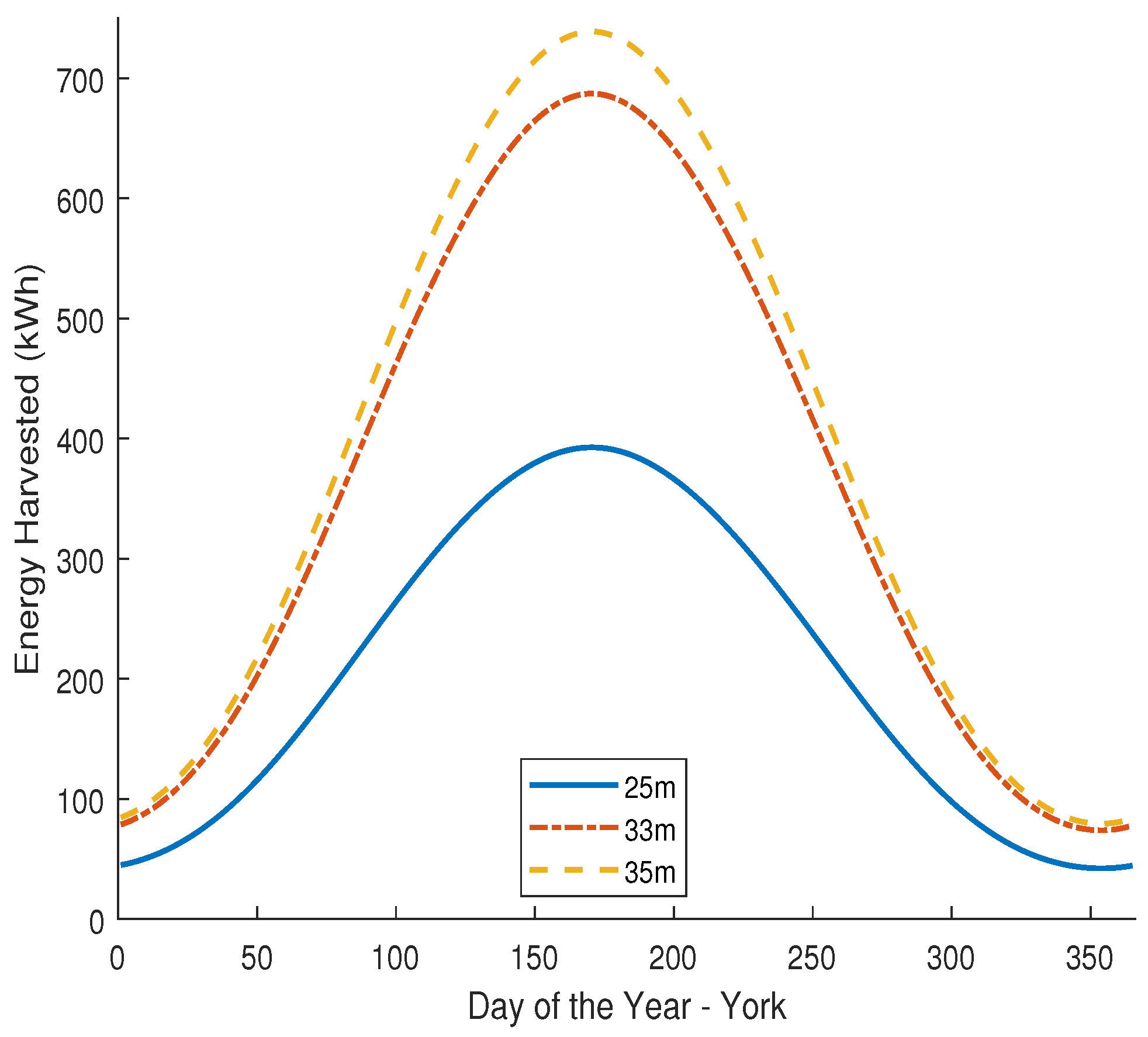
Figure 7 is computed using (9) and plotted for different days of the year.
Figure 8 shows that
in equatorial regions ranges between 7–8 kWh/m
/day around June/July when the sun is furthest from the equator. This value increases to approximately 11 kWh/m
/day towards the beginning and the end of the year when the sun is closest to the equator. On the contrary,
attains its maximum value of approximately 14 kWh/m
/day in regions further up the northern hemisphere during the middle of the year. The main reason being the significantly longer duration of daylight experienced during this time of the year [
31]. Unfortunately, the
drops to its minimum value of approximately 1.5 kWh/m
/day on December the 21st in the northern hemisphere, due to the small duration of daylight.
Therefore, continuous year-round operations of a solar-powered HAP in the northern hemisphere (especially towards the North Pole) are constrained by the duration of daylight on the year-end solstice. To ensure feasible operations, the total energy,
collected by the platforms on the year-end solstice is evaluated with the total energy consumption by the platform and payload to ensure adequate availability of energy. This is based on an assumption that energy can only be stored for 24 h. Considering the total area of solar cells deployed on the platform and the efficiency of the solar cells, and
is expressed as follows:
where
and
are efficiency and area of the photovoltaic system.

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














