Individual Phase Full-Power Testing Method for High-Power STATCOM

Abstract
:1. Introduction
2. Circuit Configuration and Operation Principle
3. Mathematical Model of the Individual Phase Full-Power Testing System
3.1. Basic Relationship and Constraints
- (1)
- The C-phase voltage vector uCO cannot be parallel to A-phase voltage uAO. This is because both A-phase and B-phase currents contain some positive active component to compensate for the resistance loss and convertor loss, if C-phase voltage uCO is parallel to A-phase voltage uAO, the C-phase current cannot be vertical to the C-phase voltage vector uCO, thus C-phase cannot get its active power balance. This shows that C-phase voltage and A-phase voltage cannot be simplified to a simple algebraic superposition relationship, and they have to be a vector superposition relationship.
- (2)
- The reactive components in the A-phase and B-phase currents cannot be exactly offset, in other words, the size of their reactive components cannot be the same. This is because when the reactive components are exactly offset, the sum of A-phase and B-phase currents is in the same direction as the A-phase voltage uAO, in that case the C-phase voltage uCO cannot be vertical to the current iC unless uCO itself is perpendicular to uAO, thus C-phase cannot get its active power balance.
3.2. Recommended Voltage-Current Combination
4. Control System Design
4.1. Control System Structure
- (1)
- In the phase-locked unit, the phase of the access port voltage uAC was directly detected, and then minus 30° to be as the phase reference of A-phase voltage, and further minus 120°to be as the phase reference of C-phase voltage. This is because in the selected voltage-current relationship shown in Figure 4, the A-phase voltage uAO lags the access port voltage uAC by 30°, and it is ahead of C-phase voltage uCO by 120°.
- (2)
- In the individual phase instantaneous control, both A-phase and B-phase adopt a double loop control structure. The A-phase current reference contains two components. One is to generate the required reactive current for power evaluation while the other is to regulate the A-phase total DC voltage. The B-phase current reference consists of three components, the first part is to offset the A-phase reactive current, the second is to regulate the B-phase total DC voltage, and the third is to regulate the C-phase total DC voltage. The C-phase uses an open-loop voltage control to directly calculate the required C-phase output voltage according to the given amplitude and phase.
- (3)
- The CPS-PWM unit distributes the drive signals of every submodule according to the each phase total voltage demand calculated by the individual phase controller, and it also includes a voltage balancing control among different sub-modules in each phase chain, and such balancing control has been studied in many literatures [33,34,35,36,37]. Because this unit is basically the same as the conventional STACOM, here it will not be described again.
4.2. Soft Power-on Process for the Individual Phase Full-Load Testing System
- (1)
- Before powering up the main part of the tested STATCOM, firstly block the three-phase converters and put in the three-phase soft power-up resistor.
- (2)
- Then turn on the grid breaker to start the power-on process, thus the grid line voltage charges the DC capacitors of A/B/C three-phase converters by uncontrolled rectification.
- (3)
- When DC-bus voltage of serial phase (here C-phase) converter exceeded a set threshold Uf, bypass C-phase converter while keep both A-phase and B-phase converters blocked. Thus, the grid-line voltage charges the DC-link capacitors of A-phase and B-phase converters by uncontrolled rectification, while the DC voltage of C phase converter keeps its current value.
- (4)
- When the DC-bus voltage of parallel phases converters has exceeded their set threshold Udc, bypass the A/B phase converters while keep C-phase converters blocked. Thus, the grid line voltage charges the DC capacitors of C phase converter by uncontrolled rectification. While, the DC voltage of A/B phase converters keeps its current value.
- (5)
- When the DC-bus voltage of C-phase converter has exceeded its set threshold UdcN, there is a bypass of the soft start resistor by turning on the switches, and then end the soft power-on process.
5. Simulation Verification
- (1)
- During t = 0–1.6 s, the STATOM performs the proposed soft power-on process as Figure 6.
- (2)
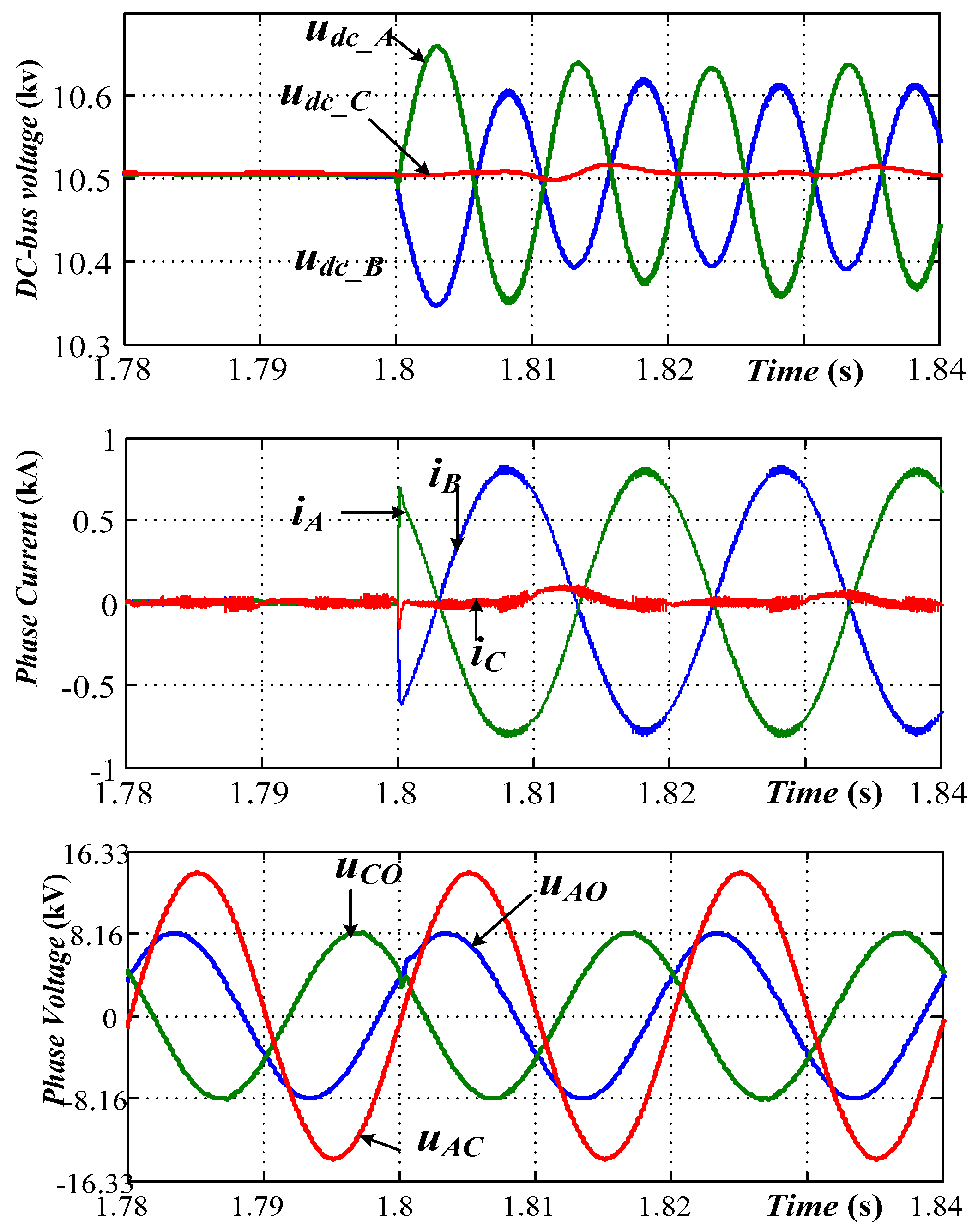
- At t = 1.6 s, the proposed control system shown as Figure 5 is put into operation. And the DC-bus voltage reference of each phase is stepped from 10 kV to 10.5 kV at t = 1.6 s to verify the proposed DC voltage regulation, while the reactive current of A-phase is still kept zero.
- (3)
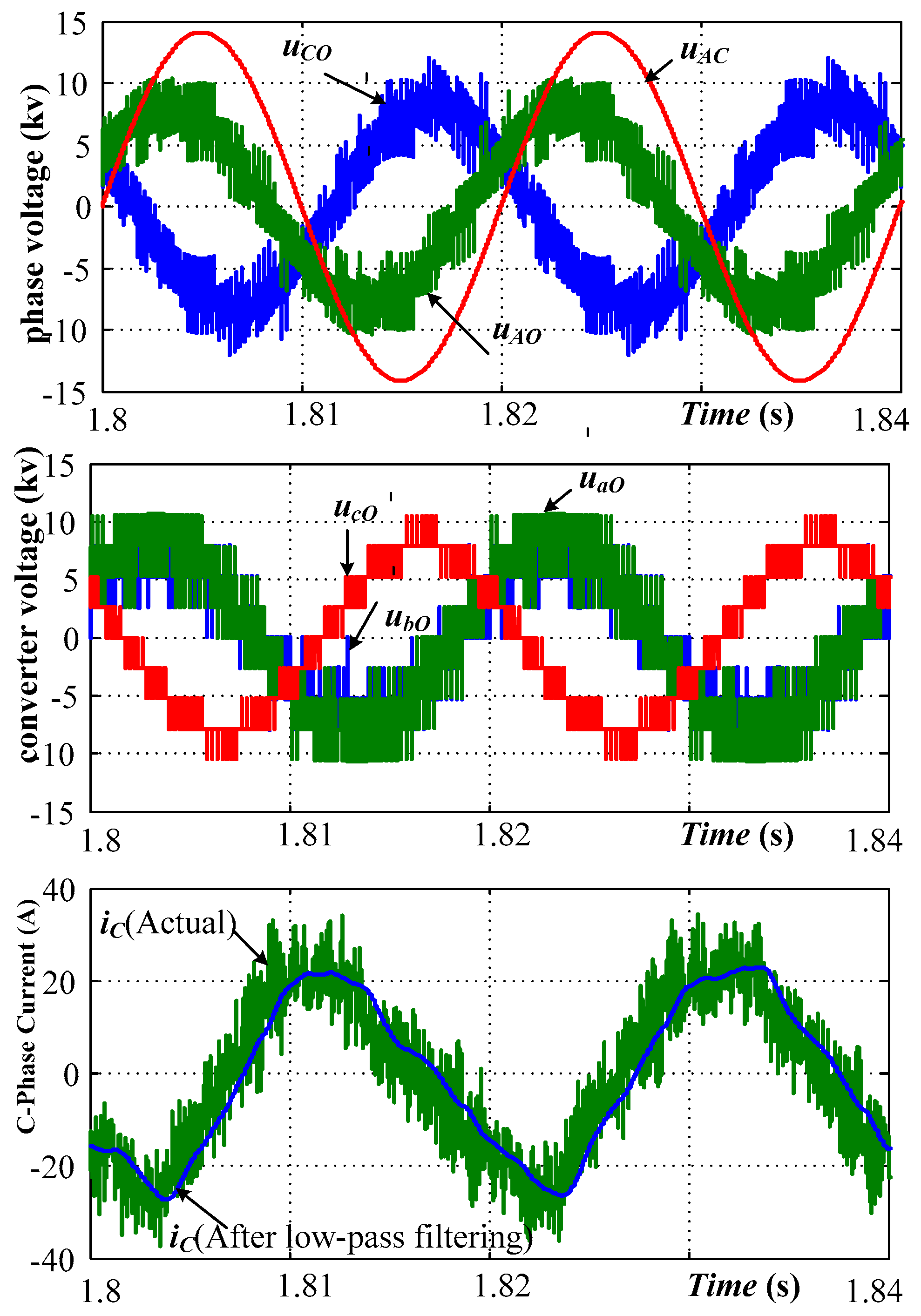
- From the time, t = 1.8 s, the A-phase reactive current reference steps to its rated value.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liang, Y.; Nwankpa, C.O. A New type of STATCOM based on cascading voltage source inverters with phase-shifted unipolar SPWM. IEEE Trans. Ind. Appl. 1999, 35, 1447–1453. [Google Scholar]
- Schauder, C.; Gernhardt, M.; Stacey, E.; Lemak, T.; Gyugyi, L.; Cease, T.; Edris, A. Development of a ±100 MVAr static condenser for voltage control of transmission systems. IEEE Trans. Power Deliv. 1995, 10, 1486–1496. [Google Scholar] [CrossRef]
- Jain, A.; Joshi, K.; Behal, A.; Mohan, N. Voltage regulation with STATCOMs: Modeling, control and results. IEEE Trans. Power Deliv. 2006, 21, 726–735. [Google Scholar] [CrossRef]
- Rao, P.; Crow, M.; Yang, Z. STATCOM control for power system voltage control applications. IEEE Trans. Power Deliv. 2000, 15, 1311–1317. [Google Scholar] [CrossRef]
- Barrena, J.A.; Marroyo, L.; Vidal, M.Á.R.; Apraiz, J.R.T. Individual voltage balancing strategy for PWM cascaded H-bridge converter-based STATCOM. IEEE Trans. Ind. Electron. 2008, 55, 21–29. [Google Scholar] [CrossRef]
- Townsend, C.D.; Summers, T.J.; Betz, R.E. Phase-shifted carrier modulation techniques for cascaded H-bridge multilevel converters. IEEE Trans. Ind. Electron. 2015, 62, 6684–6696. [Google Scholar] [CrossRef]
- Singh, B.; Al-Haddad, K.; Saha, R.; Chandra, A. Static synchronous compensators (STATCOM): A review. IET Power Electron. 2009, 2, 297–324. [Google Scholar] [CrossRef]
- Fujii, K.; De Doncker, R.W. Optimization of soft-switched flying capacitor multi-level converters applied to STATCOMs. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–10. [Google Scholar]
- Marchesoni, M.; Tenca, P. Diode-clamped multilevel converters: A practicable way to balance DC-link voltages. IEEE Trans. Ind. Electron. 2002, 49, 752–765. [Google Scholar] [CrossRef]
- Lv, J.; Gao, C.; Chen, S.; Liu, X.; Chen, Z. A novel STATCOM based on diode-clamped modular multilevel converters. IEEE Trans. Power Electron. 2017, 32, 5964–5977. [Google Scholar]
- Peng, F.; Lai, J. Dynamic performance and control of a static VAr generator using cascade multilevel inverters. IEEE Trans. Ind. Appl. 1997, 33, 748–755. [Google Scholar] [CrossRef]
- Cheng, Y.; Qian, C.; Crow, M.L.; Pekarek, S.; Atcitty, S. A comparison of diode-clamped and cascaded multilevel converters for a STATCOM with energy storage. IEEE Trans. Ind. Electron. 2006, 53, 1512–1521. [Google Scholar] [CrossRef]
- Lesnicar, A.; Marquardt, R. An innovative modular multilevel converter topology suitable for a wide power range. In Proceedings of the 2003 IEEE Bologna Power Tech Conference Proceedings, Bologna, Italy, 23–26 June 2003. [Google Scholar]
- Pereira, M.; Retzmann, D.; Lottes, J.; Wiesinger, M.; Wong, G. An MMC STATCOM for network and grid access applications. In Proceedings of the 2011 IEEE Trondheim Power Tech Conference, Trondheim, Norway, 13–23 June 2011; pp. 1–5. [Google Scholar]
- Inoue, S.; Yoshii, T.; Akagi, H. Control and performance of a transformerless cascade PWM STATCOM with star configuration. IEEE Trans. Ind. Appl. 2007, 43, 1041–1049. [Google Scholar]
- Bina, M.T. A Transformerless Medium-voltage STATCOM topology based on extended modular multilevel converters. IEEE Trans. Ind. Electron. 2011, 26, 1534–1545. [Google Scholar]
- Popavath, L.; Kaliannan, P. Photovoltaic-STATCOM with low voltage ride through strategy and power quality enhancement in a grid integrated wind-PV system. Electronics 2018, 7, 51. [Google Scholar] [CrossRef]
- Hossain, M.J.; Pota, H.R.; Ugrinovskii, V.A.; Ramos, R.A. Simultaneous STATCOM and pitch angle control for improved LVRT capability of fixed-speed wind turbines. IEEE Trans. Sustain. Energy 2010, 1, 142–151. [Google Scholar] [CrossRef]
- Park, J.; Yeo, S.; Choi, J. Development of ±400Mvar World Largest MMC STATCOM. In Proceedings of the 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea, 7–10 October 2018. [Google Scholar]
- IEEE. Approved Draft Guide for the Functional Specifications for Transmission Static Synchronous Compensator (STATCOM) Systems; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA; Available online: https://ieeexplore.ieee.org/document/STDAPE23348 (accessed on 3 July 2019).
- IEC. Voltage Sourced Converter (VSC) Valves for Static Synchronous Compensator (STATCOM): Electrical Testing; International Electrotechnical Commission (IEC): Geneva, Switzerland; Available online: https://webstore.iec.ch/publication/33207 (accessed on 3 July 2019).
- Guan, R.; Xue, Y.; Zhang, X.P. Advanced RTDS-based studies of the impact of STATCOM on feeder distance protection. J. Eng. 2018, 2018, 1038–1042. [Google Scholar] [CrossRef]
- Langston, J.; Qi, L.; Steurer, M.; Sloderbeck, M.; Liu, Y.; Xi, Z.; Mundkur, S.; Liang, Z.; Huang, A.Q.; Bhattacharya, S.; et al. In Testing of a controller for an ETO-based STATCOM through controller hardware-in-the-loop simulation. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 1–8 July 2009. [Google Scholar]
- Liu, W.H.; Song, Q.; Zhang, D.J.; Chen, T.J.; Teng, L.T.; Zheng, D.R. Equivalent Tests of Links of 50 MVA STATCOM. Trans. China Electrotech. Soc. 2006, 21, 73–78. [Google Scholar]
- Woodhouse, M.L.; Donoghue, M.W.; Osborne, M.M. Type Testing of the GTO Valves for a Novel STATCOM Converter; IEE: London, UK, 2001; pp. 84–90. [Google Scholar]
- Zhang, Y.; Li, Q.; Zhang, S. Converter chain equivalent experiment for STATCOM of large capacity based on dc power supply. J. Power Supply 2017, 5, 94–99. [Google Scholar]
- Xie, Y.; Zhuo, F. Factory-used energy-saving testing method for STATCOM. Shanxi Power 2013, 11, 1–4. [Google Scholar]
- Liu, D.; Zhang, Y.; Ma, J.; Liu, X.; Gao, J. Current closed-loop test method for ±100 mvar high-voltage STATCOM in weak grid based on principle of equal potential. J. Power Supply 2018, 1, 119–124. [Google Scholar]
- Shi, Y.; Liu, B.; Shi, Y.; Duan, S. Individual phase current control based on optimal zero sequence current separation for a star-connected cascade STATCOM under unbalanced conditions. IEEE Trans. Power Electron. 2016, 31, 2009–2100. [Google Scholar] [CrossRef]
- Hatano, N.; Ise, T. Control scheme of cascaded H-bridge STATCOM using zero-sequence voltage and negative-sequence current. IEEE Trans. Power Deliv. 2010, 25, 543–550. [Google Scholar] [CrossRef]
- Li, B.; Yang, R.; Xu, D. Analysis of the phase-shifted carrier modulation for modular multilevel converters. IEEE Trans. Power Electron. 2015, 30, 297–310. [Google Scholar] [CrossRef]
- Jing, N.; He, Y. Phase-shifted suboptimal pulse-width modulation strategy for multilevel inverter. In Proceedings of the 2006 1st IEEE Conference on Industrial Electronics and Applications, Singapore, 24–26 May 2006. [Google Scholar]
- Deng, F.; Chen, Z. Voltage-balancing method for modular multilevel converters under phase-shifted carrier-based pulsewidth modulation. IEEE Trans. Power Electron. 2015, 62, 4158–4169. [Google Scholar] [CrossRef]
- Hagiwara, M.; Akagi, H. Control and experiment of pulse width modulated modular multilevel converters. IEEE Trans. Power Electron. 2009, 24, 1737–1746. [Google Scholar] [CrossRef]
- Qin, J.; Saeedifard, M. Reduced switching-frequency voltage balancing strategies for modular multilevel HVDC converters. IEEE Trans. Power Deliv. 2013, 4, 2403–2410. [Google Scholar] [CrossRef]
- Deng, F.; Chen, Z. A control method for voltage balancing in modular multilevel converters. IEEE Trans. Power Electron. 2014, 1, 66–76. [Google Scholar] [CrossRef]
- Han, C.; Huang, A.Q.; Liu, Y.; Chen, B. A generalized control strategy of per-phase DC voltage balancing for cascaded multilevel converter-based STATCOM. In Proceedings of the 2007 Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Rated rating | SN | ±10 Mvar |
| Rated line voltage | UlN | 10 kV |
| Rated phase voltage | UPN | 5.7 kV |
| Rated current | IPN | 0.57 kA |
| Arm resistance | RA, RB, RC, | 0.1 Ω (0.01 pu) |
| Arm reactance | LA, LB, LC, | 3.2 mH (0.1 pu) |
| Submodule number in each phase | N | 4 |
| DC-link capacitance of each submodule | Cdc | 40 mF |
| Rated DC-bus voltage of each phase converter | UdcN | 10.5 kV |
| Switching frequency of submodule | fs | 500 Hz |
| Proportional coefficient of the current-loop controller | Kp_c | 200 |
| Proportional coefficient of the voltage-loop controller | Kp_v | 4 |
| Integral coefficient of the voltage-loop controller | Ki_v | 50 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Q.; Li, B.; Tan, Y.; Mao, X.; Zhu, S.; Zhu, Y. Individual Phase Full-Power Testing Method for High-Power STATCOM. Electronics 2019, 8, 754. https://doi.org/10.3390/electronics8070754
Huang Q, Li B, Tan Y, Mao X, Zhu S, Zhu Y. Individual Phase Full-Power Testing Method for High-Power STATCOM. Electronics. 2019; 8(7):754. https://doi.org/10.3390/electronics8070754
Chicago/Turabian StyleHuang, Qingjun, Bo Li, Yanjun Tan, Xinguo Mao, Siguo Zhu, and Yuan Zhu. 2019. "Individual Phase Full-Power Testing Method for High-Power STATCOM" Electronics 8, no. 7: 754. https://doi.org/10.3390/electronics8070754