1. Introduction
The accurate information of the motor angular position is desired in high-performance servo control systems. Due to the simple structure, strong robustness, and adaptability to various harsh environments [
1], resolvers have attracted great attention as shaft angle sensors in servo control applications such as antennas, radars, steering engines, and industrial robots.
Generally, a complete angular measurement system consists of a resolver and a Resolver-Digital Converter (RDC). In the software-based RDCs, the output signals of the resolver are transformed into sinusoidal and cosinusoidal envelopes with respect to the shaft angle after detection. Next, the angular position and velocity are obtained from the demodulation of envelopes [
2]. However, there are usually some mechanical and electrical errors in a resolver. The former are caused by the manufacturing tolerance, assembled mismatch, and deformation. The latter result from winding nonlinearity, circuit asymmetry, and excitation signal distortion. Because of these errors, the envelopes contain five nonideal characteristics, such as amplitude imbalances, DC offsets, and imperfect quadrature [
3], all of which seriously affect the accuracy of demodulation. Therefore, it is necessary to calibrate and correct the imperfect parameters in the resolver envelope signals.
As the calibration of the resolver signals is equivalent to the parameter estimation of non-orthogonal sinusoidal pair signals, approaches have been widely reported in recent years including a look-up table, optimization, observer, neural network, etc. An offline look-up table was constructed in Reference [
4] to compensate the imperfectness in encoder signals. However, a trade-off has to be made between a larger table and increased sensitivity to noise. Heydemann [
5] firstly proposed optimization approach by establishing a quadratic equation of five unknown parameters and obtained the optimal numerical solution by employing the least square method. Based on this, many literatures have presented improved methods [
6,
7]. However, the nonlinearity equation has multiple roots and lacks the ability to escape from local optimization if the initial iteration values are selected as unreasonable. To solve this issue, an adaptive estimator was given in Reference [
8] that tracks the imperfect parameters of a characteristic ellipse formed by resolver signals. An automatic calibration algorithm based on state observer was introduced in Reference [
9]. However, the strong coupling between parameters and the angular velocity in the mathematical model was undesired because the improvement of the calibration accuracy depended on the angular frequency. Therefore, an improved algorithm based on two-step gradient estimators was presented to decouple them [
10]. Owing to the more accurate information of angular velocity, the calibration accuracy was further improved. Besides, signal flow network and deep learning algorithm in Reference [
11] were introduced to ensure the independence of the variables.
However, the above methods are based on simplified models. The direct influence of inductive harmonics, residual excitation components, and random noise on the calibration accuracy was ignored. Since resolver windings are unevenly distributed and not exactly sinusoidal or cosinusoidal functions with respect to angular position, the output signals always contain harmonics [
3]. Moreover, residual excitation components and random noise appear because of the excitation signal distortion and electrical errors from the conditioning circuit. These noises seriously limit the further improvement of the calibration accuracy no matter which method above is used.
Several studies on noise reduction have concerned themselves with improving the calibration accuracy. Common methods include mathematical modeling, filters, and phase-locked loop. Lara et al. [
12] utilized a higher order approximation to describe harmonics but had a slight convergence deviate. The smaller the deviation was, the more complex model needed to be established. Shang et al. [
13] analyzed the harmonics by Fourier transform and weakened the 3rd harmonic through adding a corresponding harmonic in the shape function of the rotor structure. Obviously, it required a special rotor structure. Similarly, the error profile curve with respect to the angle was described by Fourier series [
14]. However, it was not an automatic calibration. Finite Impulse Response filter was applied in a self-tuning circuit [
15], which reduced noise but had an inherent time delay and phase distortion. An adaptive phase-locked loop proposed in Reference [
16] was able to filter noise online to a certain extent. However, the continuous calibration increased the unnecessary delay with the errors supposed constant in a short time. Another novel RDC algorithm performed in a frequency domain was studied in Reference [
17]. Since the detection was unrequired and only the carrier frequency component was utilized to estimate parameters, it was preferable to suppress the disturbances outside of the carrier frequency. However, the amplitude imbalances were out of consideration.
In order to achieve high-accuracy calibration of the imperfect parameters, it is important to reduce the three types of noises. Some image noising methods are worth learning and using for reference. The discrete wavelet transform (DWT) has been widely used to signal or image denoising. Because of the characteristic of multi-resolution, DWT can distinguish noise and useful information to different frequency bands [
18,
19,
20]. But the conventional wavelet threshold denosing method [
21] is difficult to flexibly select a reasonable threshold and has little effectiveness in noise reduction near the fundamental wave. Moreover, nonlocal self-similarity prior learning [
22], convolutional neural network [
23], and singular value decomposition (SVD) [
24] are also used in image denoising. Guo et al. [
24] used a few large singular values and corresponding singular vectors to estimate the image and reduce noise. Recently, because of the multi-resolution characteristic of DWT and the good correspondence between the singular value and frequency, the cooperation between DWT and SVD [
25,
26] in the time-frequency domain has attracted the attention of researchers. At present, several different combinations have been adopted in image watermarking [
27], image contrast enhancement [
28], image compression and denoising [
29], and the feature extraction of signals [
30].
Aiming to reduce the noises and obtain the high calibration accuracy of resolver signals, a DWT-SVD based filter in time-frequency domain is designed in this paper. Since this method is able to reduce inductive harmonics, residual excitation components, and random noise in resolver signals with only the fundamental and DC components being retained, the calibration accuracy can be improved effectively. Simulation and experimental results verify the effectiveness of the proposed method.
This paper is organized as follows: The calibration principle of resolver signals is introduced and the problem of noises is formulated in
Section 2.
Section 3 presents the designed DWT-SVD based filter and describes the filtering processing in detail. To verify the effectiveness of the method, simulation and experimental results are analyzed in
Section 4. Finally, the concluding remarks are given in
Section 5.
2. Calibration Principle and Problem Formulation of Resolver
As shown in
Figure 1, in a software-based RDC, when the rotor winding of resolver is excited with a high frequency voltage, the two spatially orthogonal windings on the stator will produce amplitude modulation signals which have sinusoidal and cosinusoidal envelopes with respect to shaft angle. Then the envelopes are obtained from detection. Finally, owing to the mathematical properties of trigonometric function, the angular position
and velocity
are calculated from envelopes by phase-locked loop, arctangent or other demodulation algorithms.
In practice, the resolver signals after detection are always disturbed by imperfect characteristics. The amplitude imbalances and DC offsets result from the eccentric rotor, unequal winding, and asymmetric circuit. The imperfect quadrature arises when the space angle of two coils on stator are not exactly equal to
. Therefore, the envelopes should be described as
where
and
are the amplitudes,
and
are the offsets,
represents the imperfect quadrature. Obviously, it is necessary to calibrate the envelopes and correct (1) to the standard form of sine and cosine functions before demodulation.
The calibration of resolver signals is a process of estimating the five imperfect parameters of non-orthogonal sinusoidal pair signals. These estimation methods have been widely reported in recent years. By using a look-up table, optimization, observer, neural network or other estimation algorithm, the imperfect parameters can be estimated to correct and reduce demodulation error. Thereafter, the signals can be calibrated by substituting the estimated value into the following equation:
Unfortunately, most calibration algorithms are based on simplified models and ignore the noises like harmonics, residual excitation components, and random noise in envelopes, all of which seriously affect the calibration of the resolver. The harmonic distortion arises when the unevenly distributed windings are not exactly sinusoidal or cosinusoidal shaped with respect to the angular position. The residual excitation components and random noise exist due to the electrical errors from conditioning circuit. Hence, the Equation (1) can be rewritten in the following manner:
where
is the harmonic order,
and
represent the amplitudes of the
harmonic,
and
are random noise.
As shown in
Figure 1, aiming at suppressing noises and improving calibration accuracy, several methods including mathematical modeling and low-pass filter have been used recently. However, the mathematical modeling method makes an inevitable deviation and is pretty complex. The low-pass filter has an inherent phase distortion and cannot attenuate the noises in the passband. Therefore, it is still a serious problem to filter the noises without phase distortion and preserve the fundamental and DC component only.
4. Simulation and Experimental Results
Aiming to evaluate the performance of the proposed method, the spectrums of signals are compared among the following four groups both in simulation and experiment.
Group 1: The original signals;
Group 2: The signals denoised by the low-pass Butterworth filter;
Group 3: The signals denoised by the DWT based filter;
Group 4: The signals denoised by the DWT-SVD based filter.
Next, in order to verify the influence of the filter on the calibration accuracy, the imperfect parameters of the above signals are estimated by an automatic calibration algorithm based on two-step gradient estimators in Reference [
10]. The simulation and experimental results are analyzed as follows.
4.1. Simulation Results
In the simulation, sinusoidal pair signals are generated to simulate the envelopes of resolver. The angular frequency
ω is
. The imperfect parameters are set as
,
,
,
and
. The harmonics are shown in
Table 1. In addition, the residual excitation components are 0.0010 V and 0.0011 V, respectively, with the frequency being 10 kHz. The SNR of signals is 35 dB by adding Gaussian white noise. The simulation is proceeded by using MATLAB.
In the DWT-SVD based filter (Group 4), a biorthogonal wavelet basis function “bior 5.5” is chosen. Since the biorthogonal wavelet has a linear phase, the signals can be completely reconstructed without phase distortion. Whereby, the layer of wavelet decomposition is 4. As comparisons, the low-pass Butterworth filter in Group 2 is designed with no more than 0.1 dB of ripple in a passband from 0 to 3 Hz, and at least 30 dB of attenuation in the stopband. The DWT based filter in Group 3 is designed by using 6-layer wavelet decomposition and reconstruction to reduce the high-frequency noise.
The calibration method in Reference [
10] is constructed as
where the estimator gains are chosen as
. The angular velocity
is estimated by the first four equations. Then, the amplitude
, DC offset
and phase
of
can be estimated by the rest of equations. Since the procedure of
is same as
, phase shift is calculated by
.
The results are analyzed as follows:
(1) As shown in
Figure 5, the detail coefficients
of
reflect noises with no useful information. In contrast, the approximation coefficient
contains the information of fundamental and DC components with a few harmonics and noises. Thus the decomposition can be understood as a pre-filter. Then SVD operation of a Hankel matrix created from
is made. The singular values are given in
Table 2. It is obvious that the 1st and 2nd singular values represent the fundamental wave and the 3rd reflects the DC components. Therefore,
can be finally reconstructed from the new
which is calculated by the three singular values.
(2) The performance of the filter can be verified from spectral analysis. As shown in
Figure 6, the spectrum of the original signal includes harmonics and noises. However, the low-pass filter is unable to reduce noises in the passband and results in a slight amplitude attenuation of fundamental wave. The DWT based filter has no effect on fundamental wave but is unable to suppress low-order harmonics. Unlike these filters, it is showed obviously in
Figure 6d that the DWT-SVD filter retains almost only the fundamental and DC components.
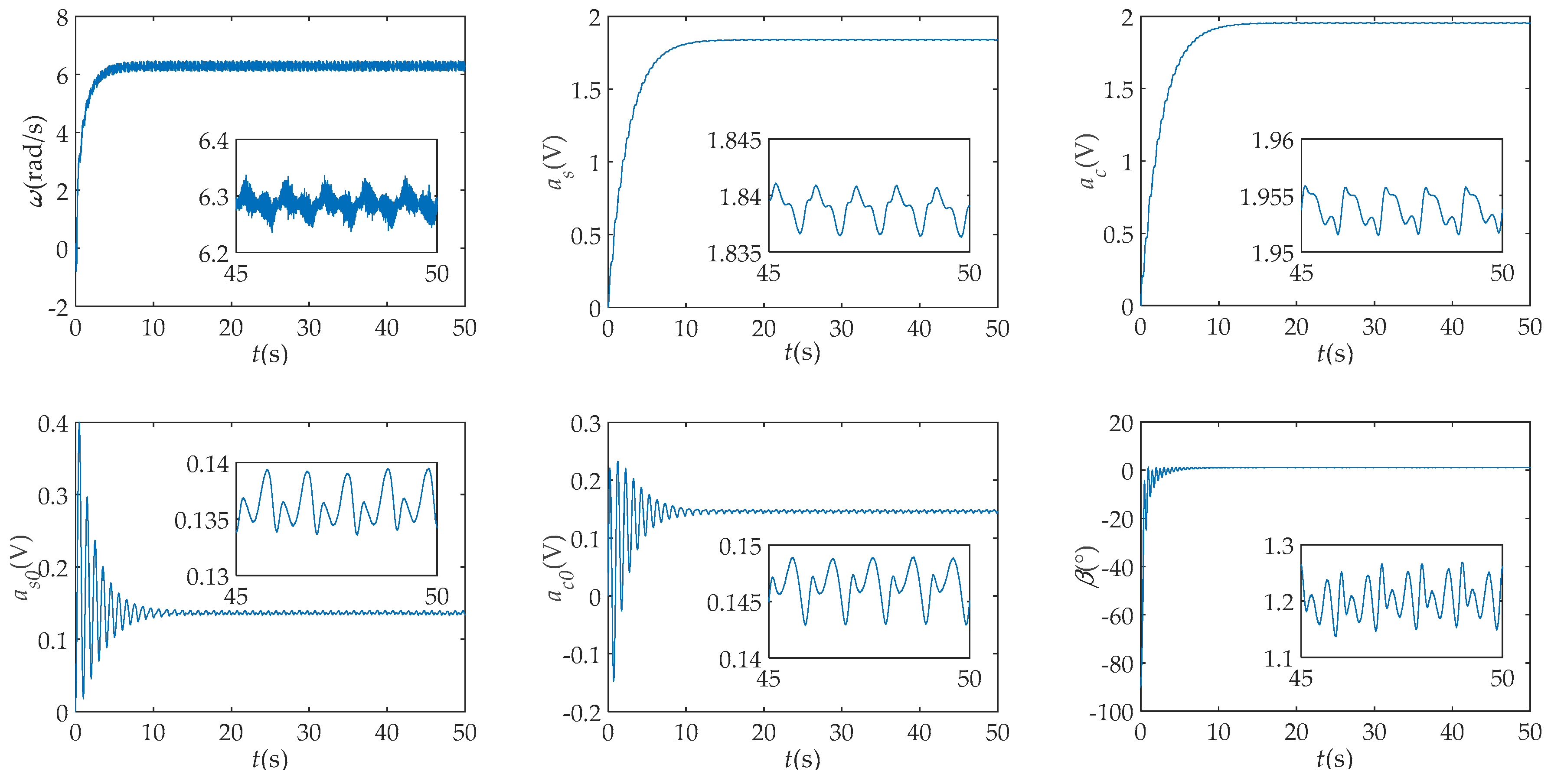
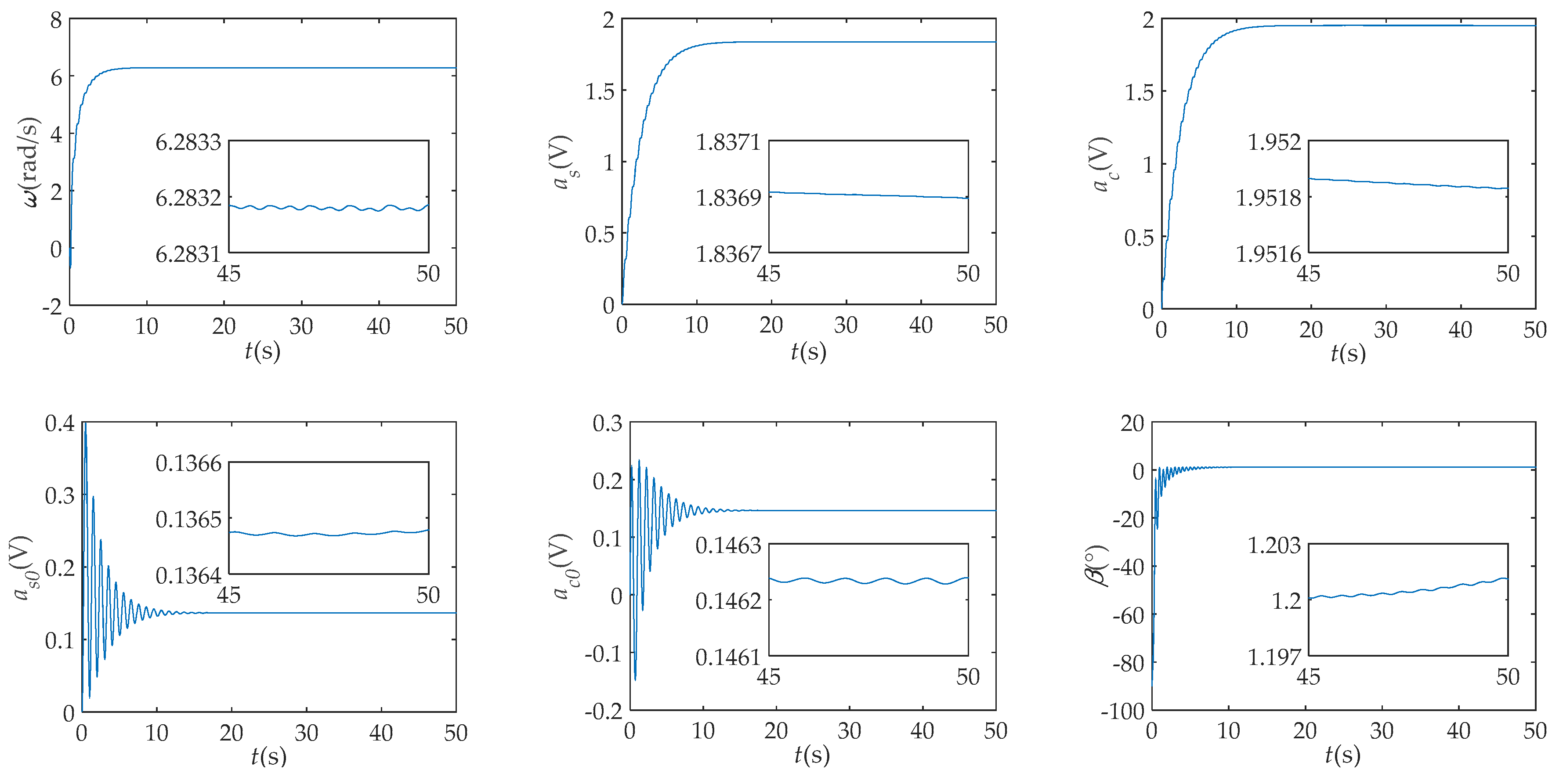
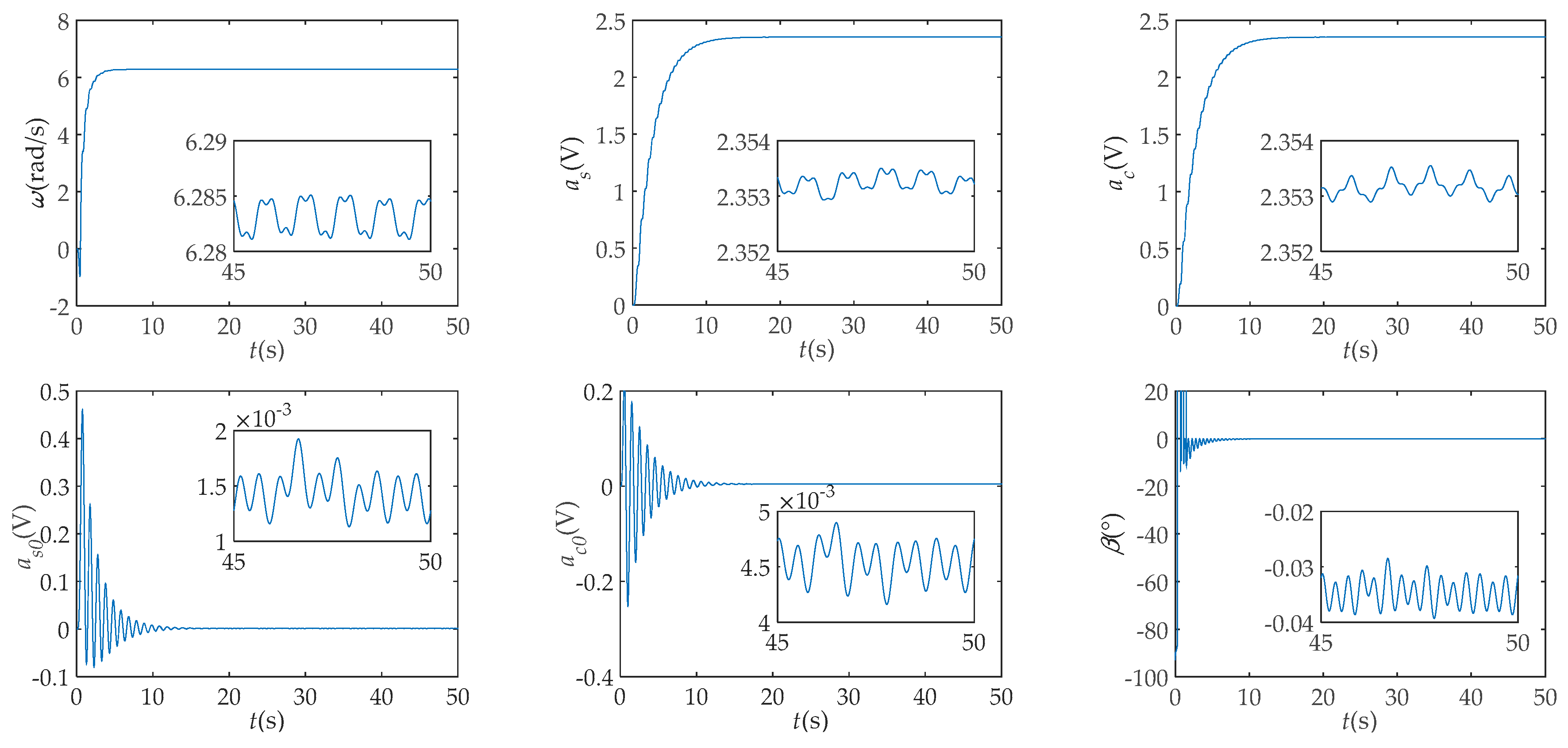
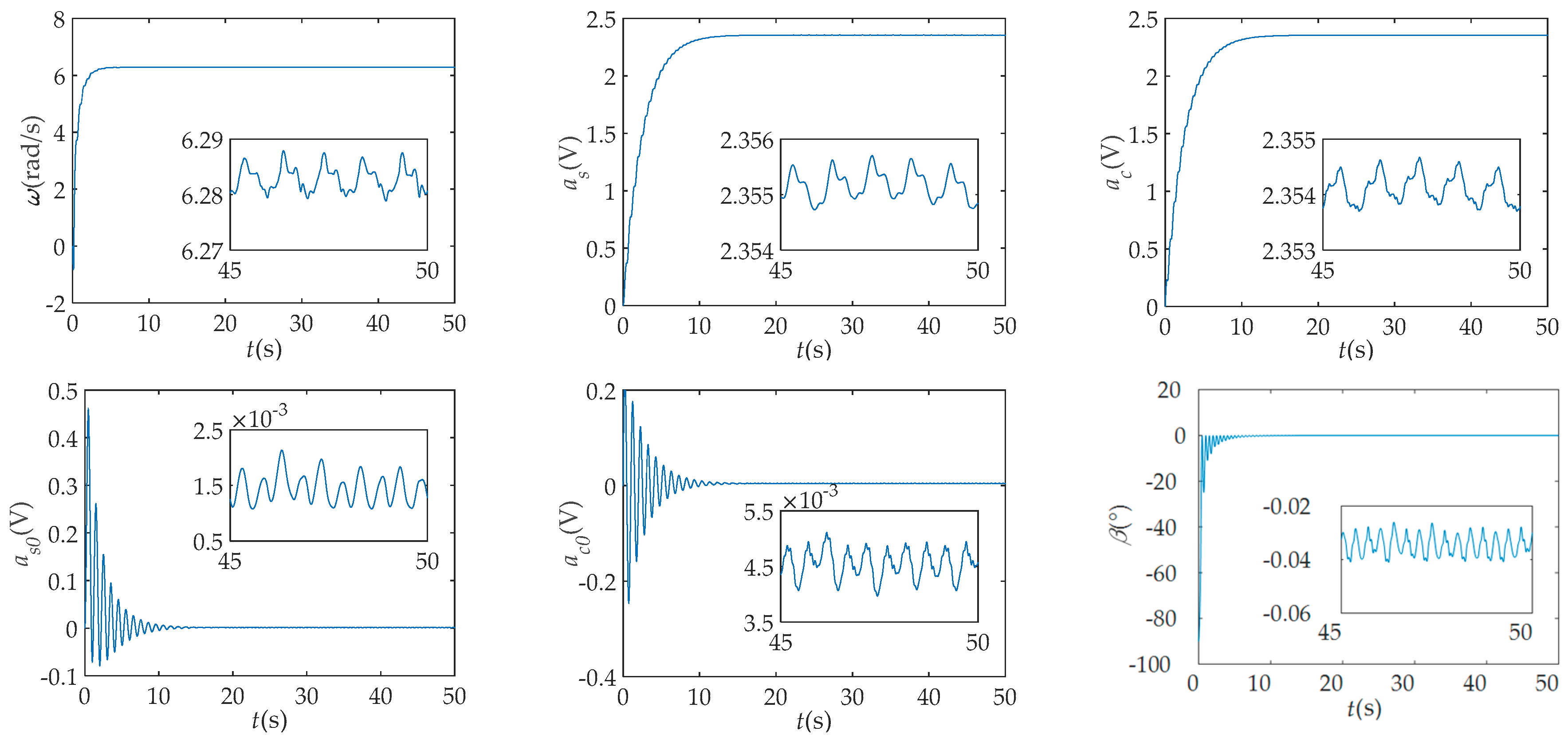
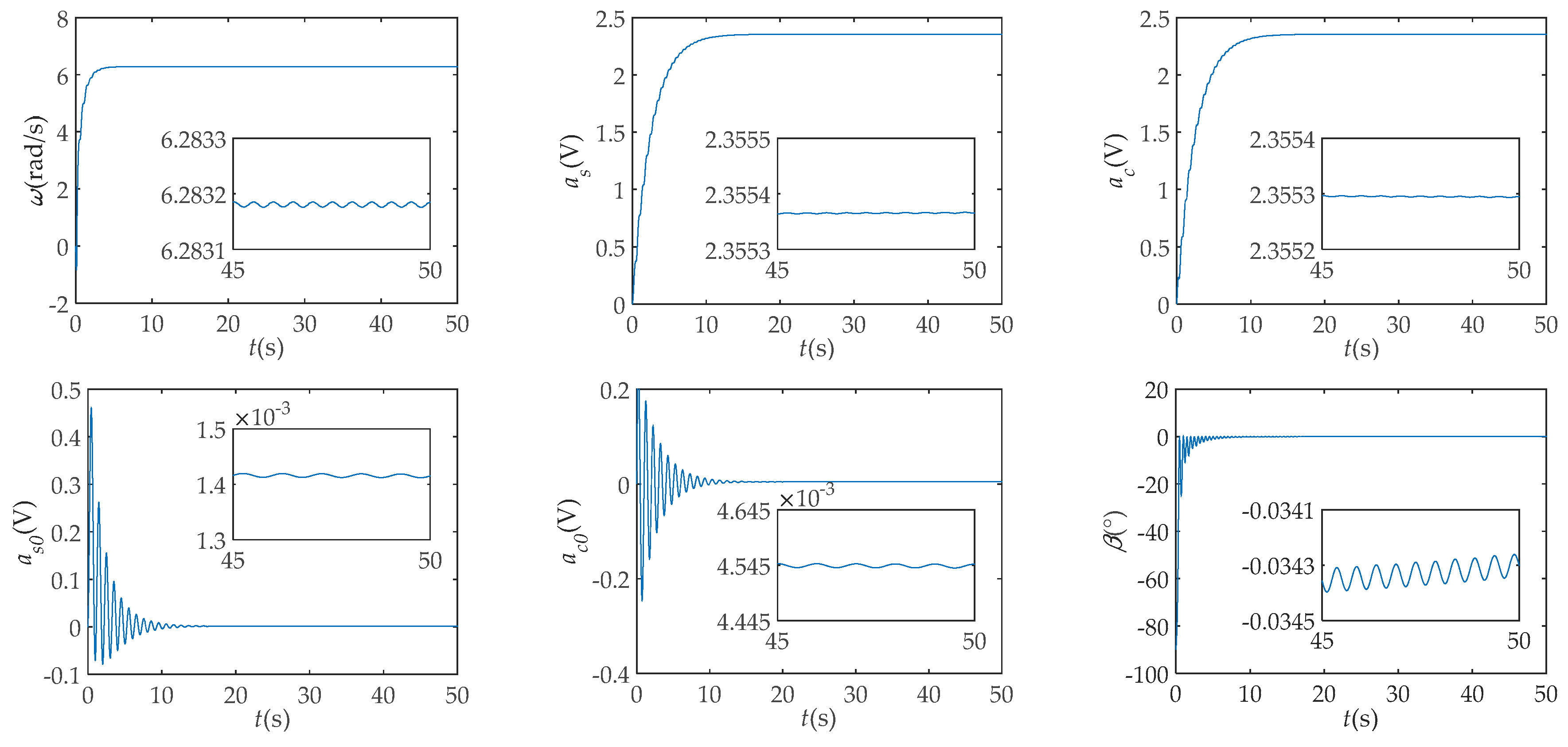
(3) By the calibration algorithm in Reference [
10], the estimations of the angular frequency and five imperfect parameters in Groups 1–4 are given in
Figure 7,
Figure 8,
Figure 9 and
Figure 10, respectively. And
Table 3 shows the estimated results calculated by means of the data and the standard deviations (STD) in the range of 40–50 s. From
Figure 7,
Figure 8,
Figure 9 and
Figure 10, the steady-state error of Group 4 is smaller than that of the other groups. Compared with the preset values in
Table 3, the accuracy of
ω after the designed filter reaches
, while the accuracies of the other groups are
,
and
, respectively. The accuracy of amplitudes after the designed filter reaches to
, while the others are
and Group 2 has a slight attenuation. Moreover, the STD is reduced at least two orders of magnitude more than the other groups. It is worth noting that the designed filter leads to a high-accuracy phase due to the phase undistorted characteristic, while the low-pass filter causes a phase shift. Therefore, the DWT-SVD filter apparently improves the calibration accuracy and is more stable than other ways.
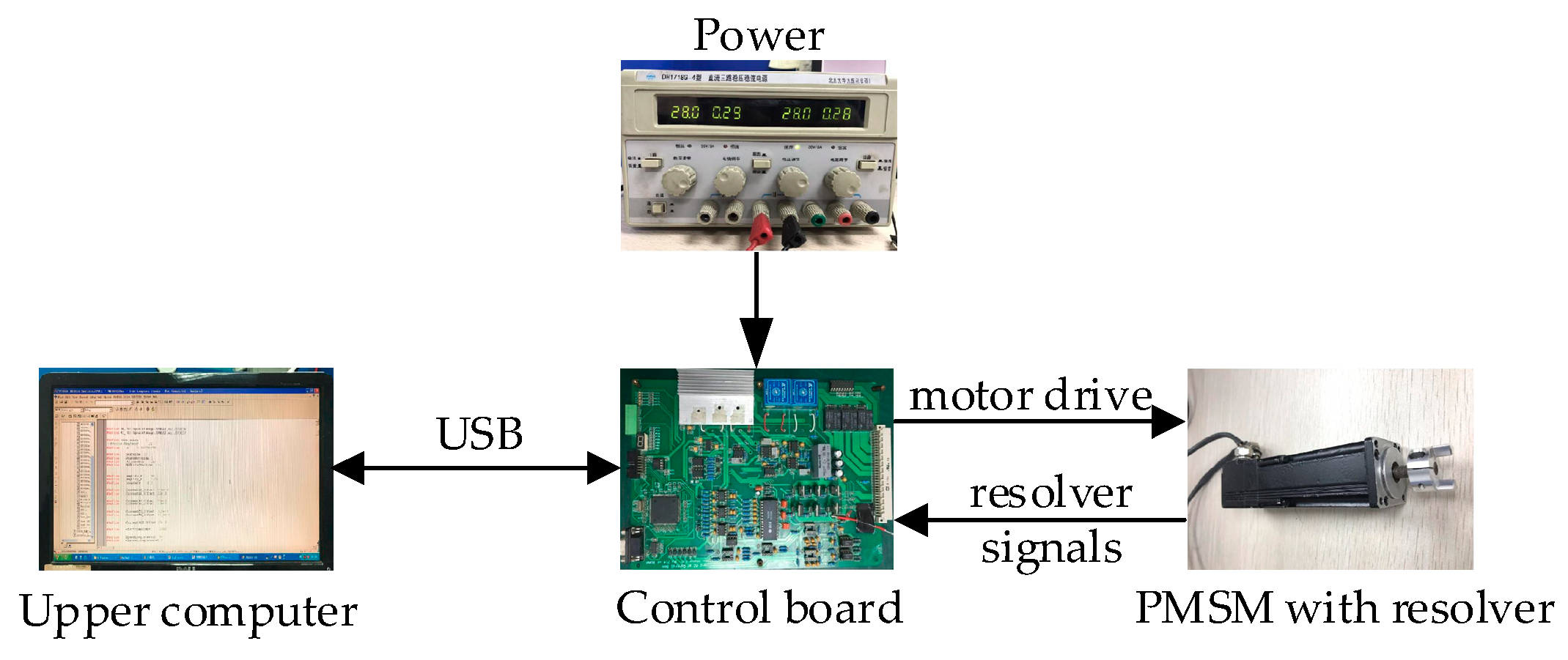
4.2. Experimental Results
The experimental platform is shown in
Figure 11. A control board drives a permanent magnet synchronous motor (PMSM) and a resolver (Infranor, Zurich, Switzerland). The parameters of PMSM and resolver are given in
Table 4. In this experiment, PMSM is driven to rotate at
and the resolver measures its angular position. After envelope detection circuits, the envelops of resolver output signals are uploaded to the upper computer through USB. Then the envelops are denoised and calibrated in the upper computer.
In this experiment, the parameters of four groups are set the same as in the simulation. The results are analyzed as follows:
(1) The coefficients and singular values of
calculated from the DWT-SVD based filter are given in
Figure 12 and
Table 5. From
Figure 12, the approximation coefficient
has already pre-filtered the residual excitation components and most of the random noise. Next, according to a rigorous test, the 1st and 2nd singular values in
Table 5 reflect the fundamental wave and the 5th value reflects the DC components. Finally, the signal can be reconstructed by the three singular values and corresponding singular vectors.
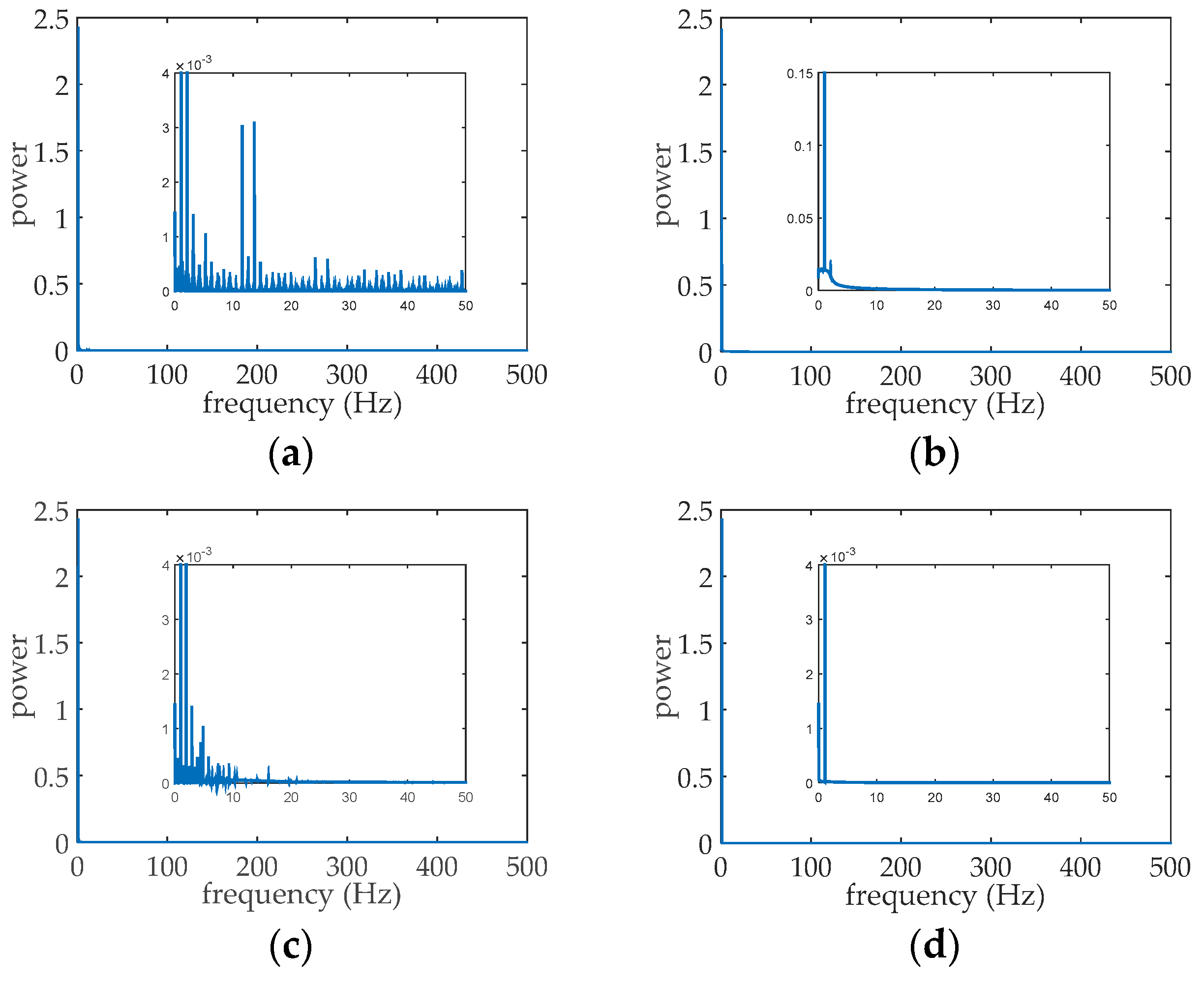
(2) The spectrums in
Figure 13 also verify the performance of the designed filter. As shown in
Figure 13a, the spectrum of the original signal contains harmonics and random noise. However, the spectrum in
Figure 13b shows that the low-pass filter attenuates the DC component seriously and cannot reduce noise in the passband. The spectrum in
Figure 13c shows that the DWT-based filter is unable to suppress low-order harmonics although it can reduce the high-frequency noise. Compared with Groups 1–3, the DWT-SVD filter in Group 4 preserves almost only the fundamental and DC components.
(3) As show in
Figure 14,
Figure 15,
Figure 16 and
Figure 17 and
Table 6, the estimations of the angular frequency
ω and five imperfect parameters
,
,
,
and
in Groups 1–4 are carried out by the calibration algorithm in [
10], respectively. From
Figure 14,
Figure 15,
Figure 16 and
Figure 17, the steady-state errors in Groups 1 and 3 are in the same order of magnitude while in Group 2 is smaller, since the harmonics in Group 2 is weaker than Groups 1 and 3. Compared with them, Group 4 has the smallest steady-state error among the four groups because the proposed method can suppress harmonics effectively. In order to further verify the effectiveness of the proposed method,
Table 6 gives the STDs of estimated parameters, which are calculated from the data in the range of 40–50 s. The STD is an important index to compare the four groups while the true values are unknown. From
Table 6, it is obvious that Group 4 has the smallest STDs which are reduced at least two orders of magnitude than others.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}