Common Switch Fault Diagnosis for Two-Stage DC-DC Converters Used in Energy Harvesting Applications


Abstract
:1. Introduction
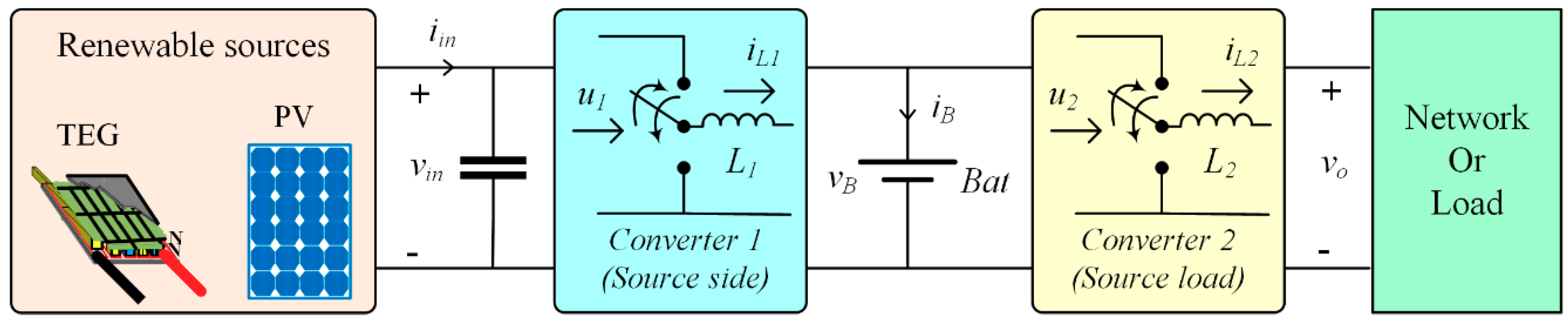
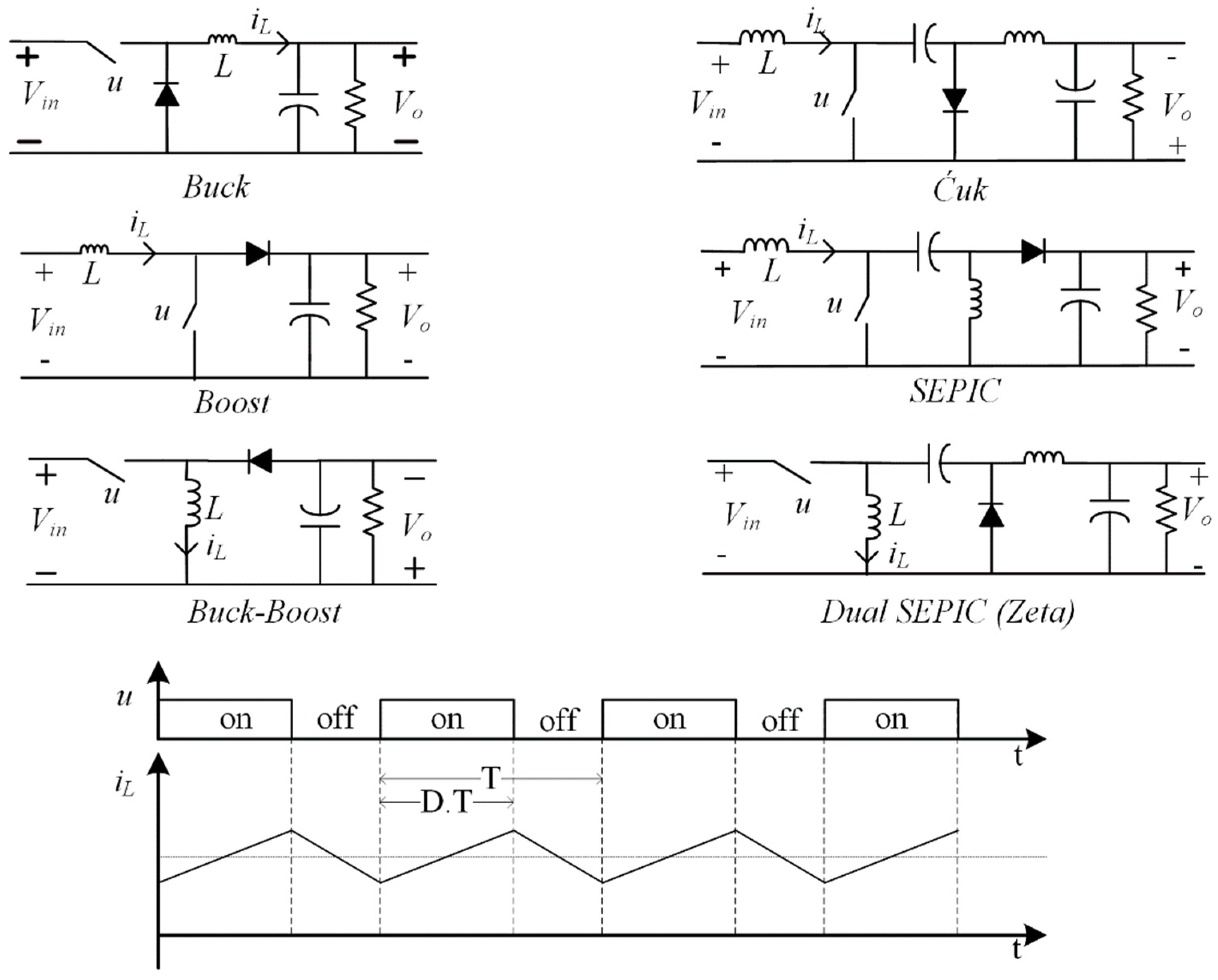
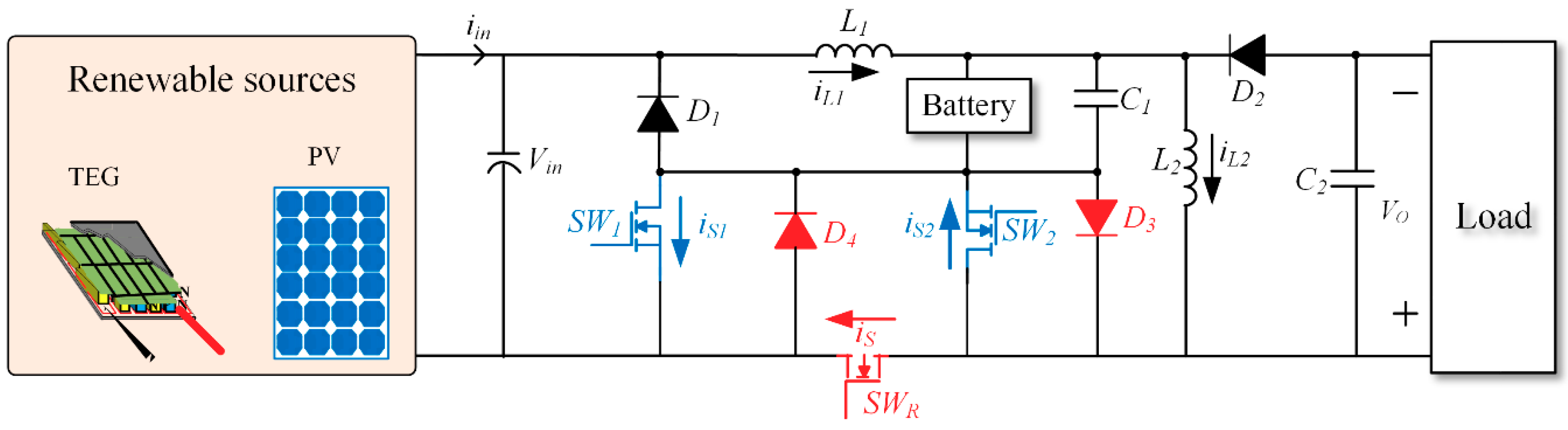
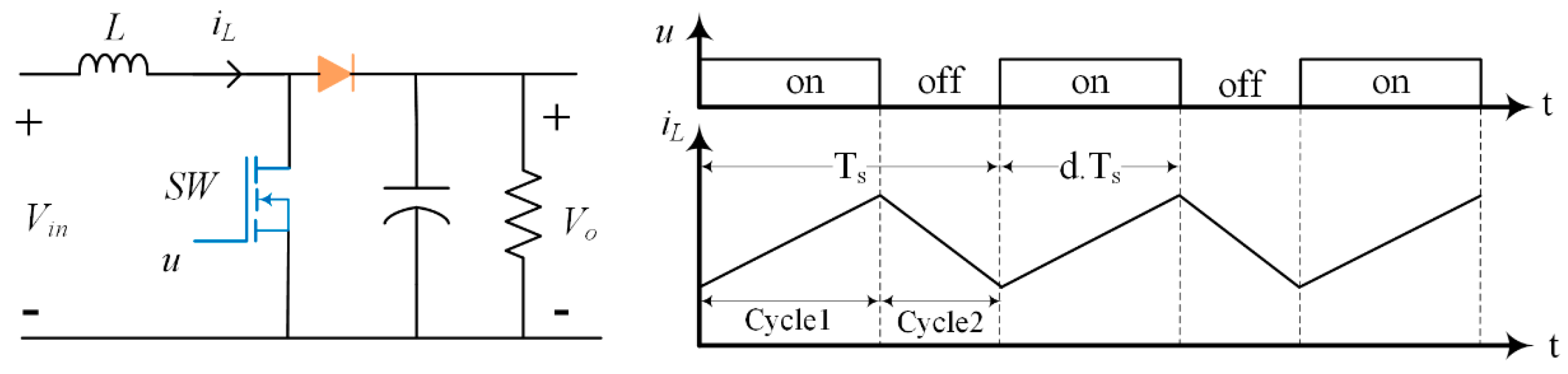
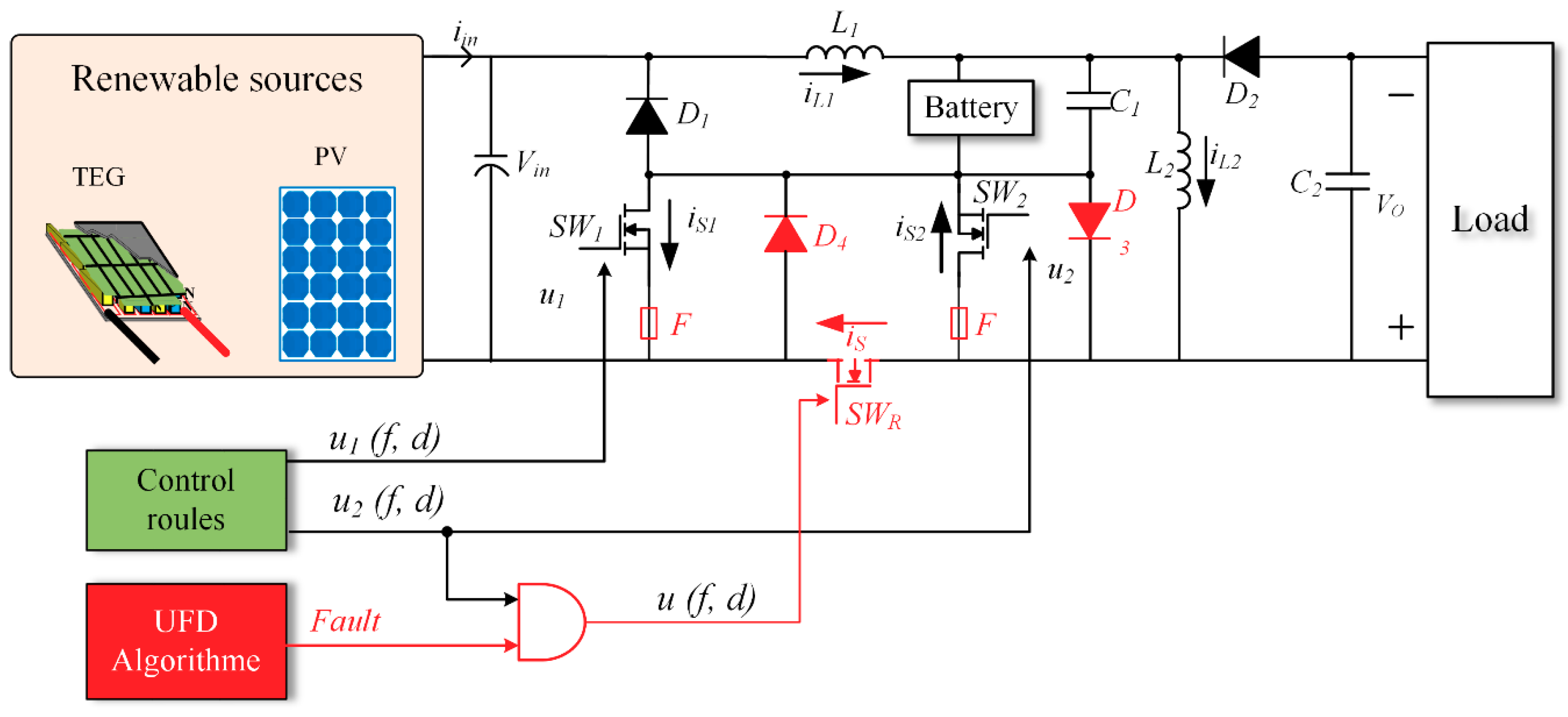
2. Classical Two-Stage DC-DC Converters
3. Switch Fault Diagnosis
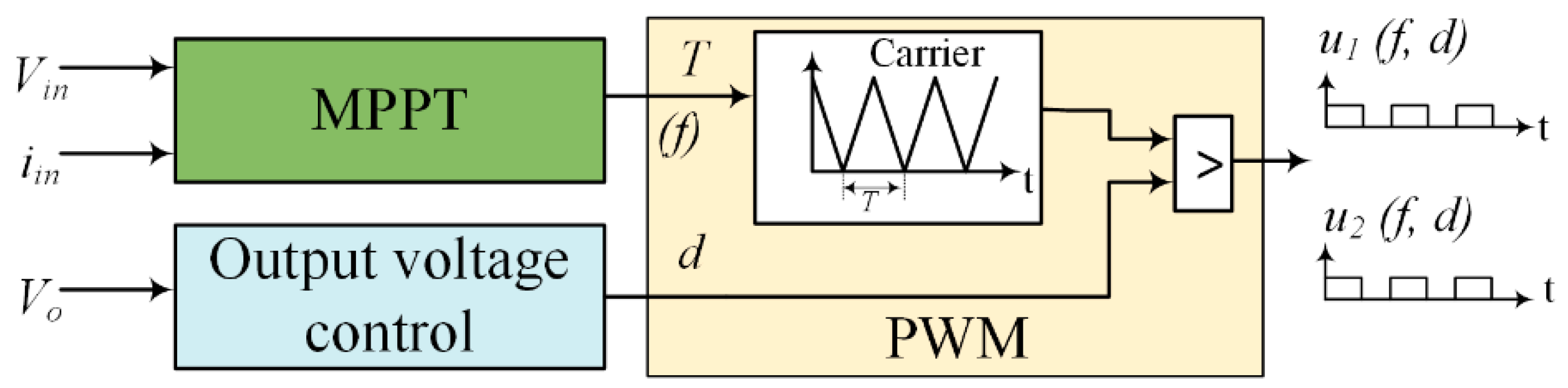
3.1. General Principle of Switch Fault Detection
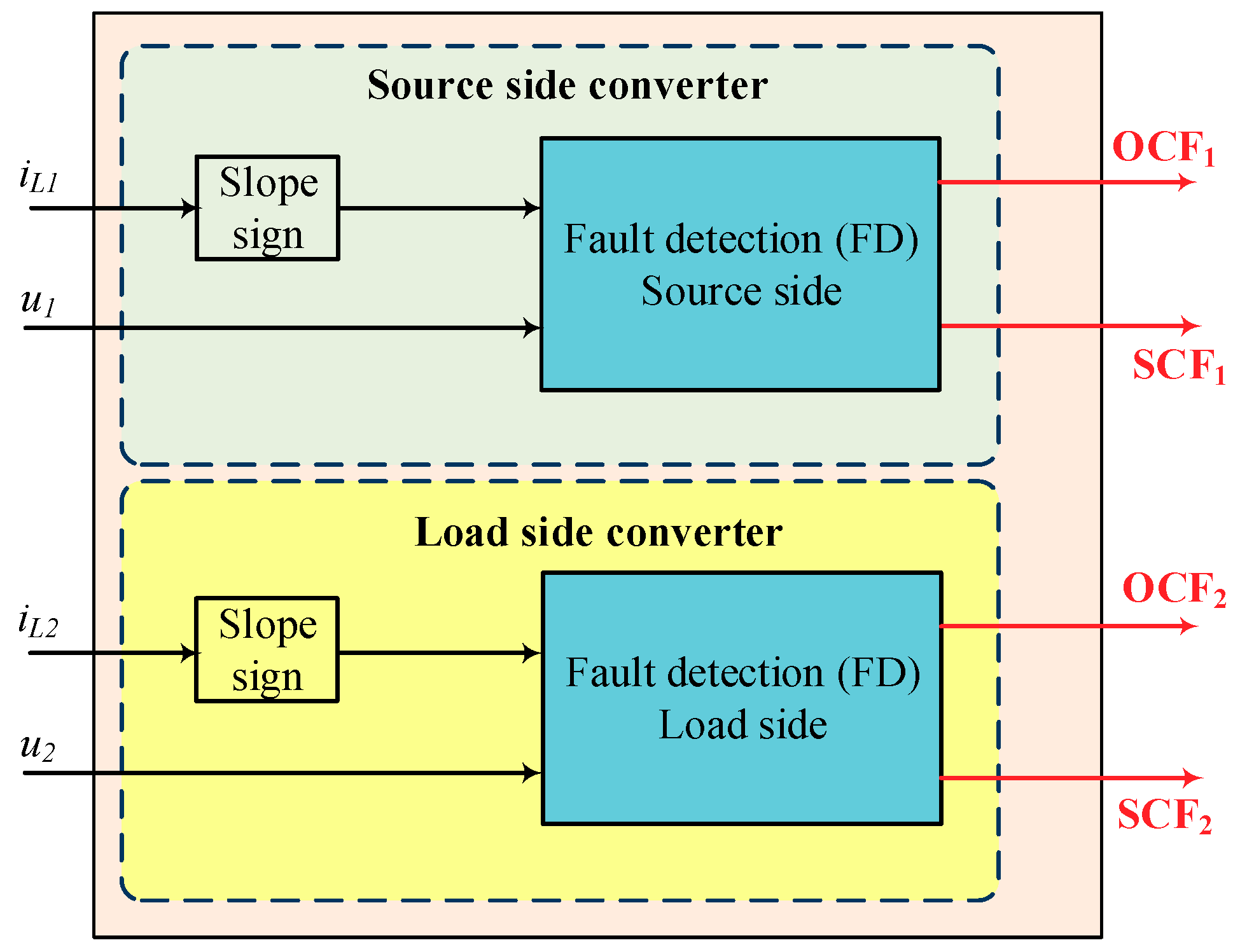
3.2. Parallel FD Algorithms
3.3. Unified Fault Diagnosis (UFD) Algorithm
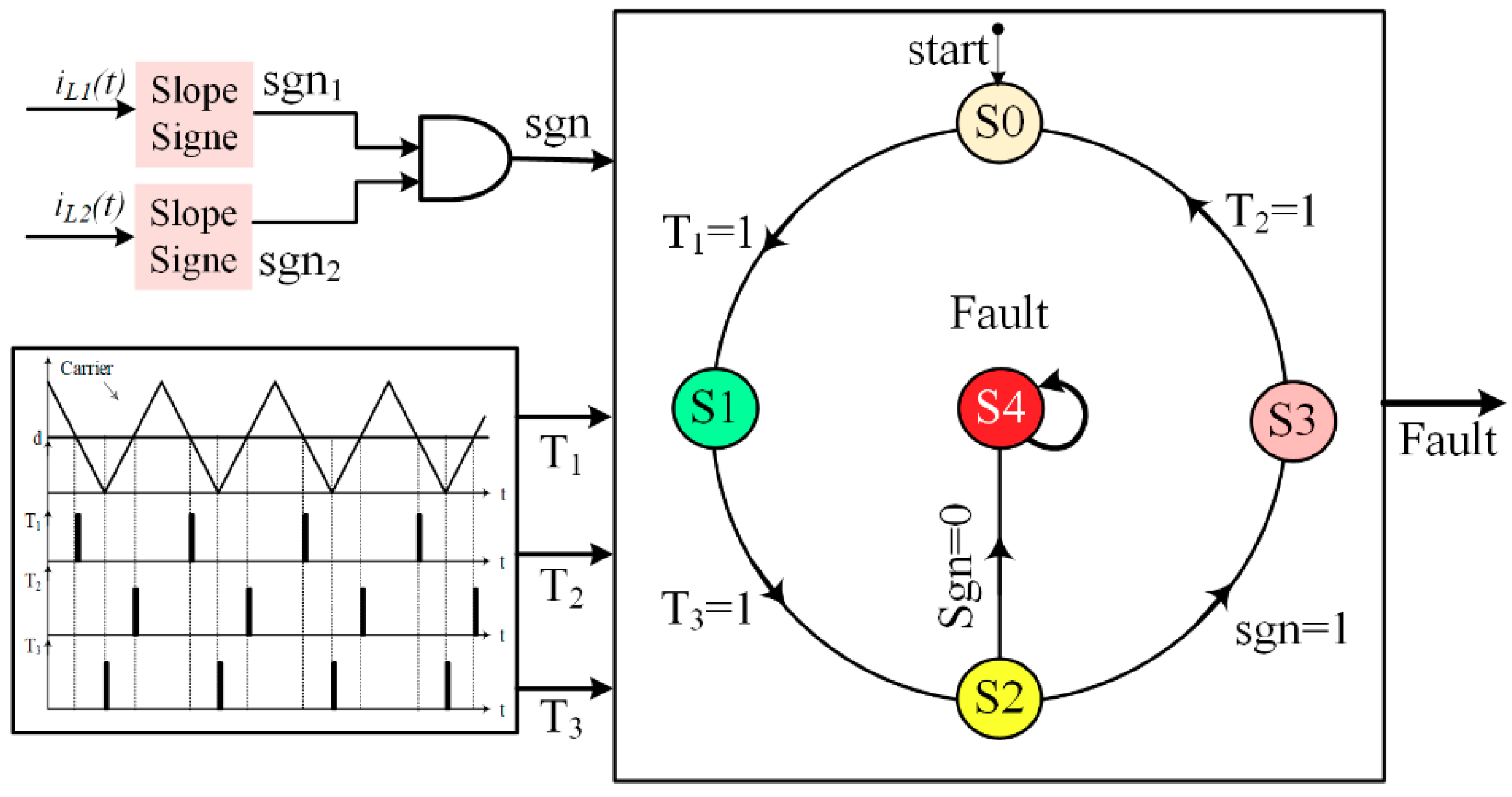
- In normal operation mode of the converters and for each period, SM starts from the initial state (S0) and the transitions occur successfully towards the state S3, consecutively (S0→S1 →S2→S3→S0);
- ○
- When the switching commands are activated, T1 goes to “1”, then a transition occurs from S0 to S1;
- ○
- The SM stays in S1 until the middle of the period during which the switches are on. When T3 is set to “1”, the SM goes to S2;
- ○
- In S2 the SM checks the state of the switches, to be sure they are closed (on). If the sgn is equal to “1”, it means that the switches operate correctly, and the SM goes to S3;
- ○
- At falling edges of the switching patterns, the switches go to “off” situation. At this time, T2 is set up to “1”, and then a transition to S0 occurs;
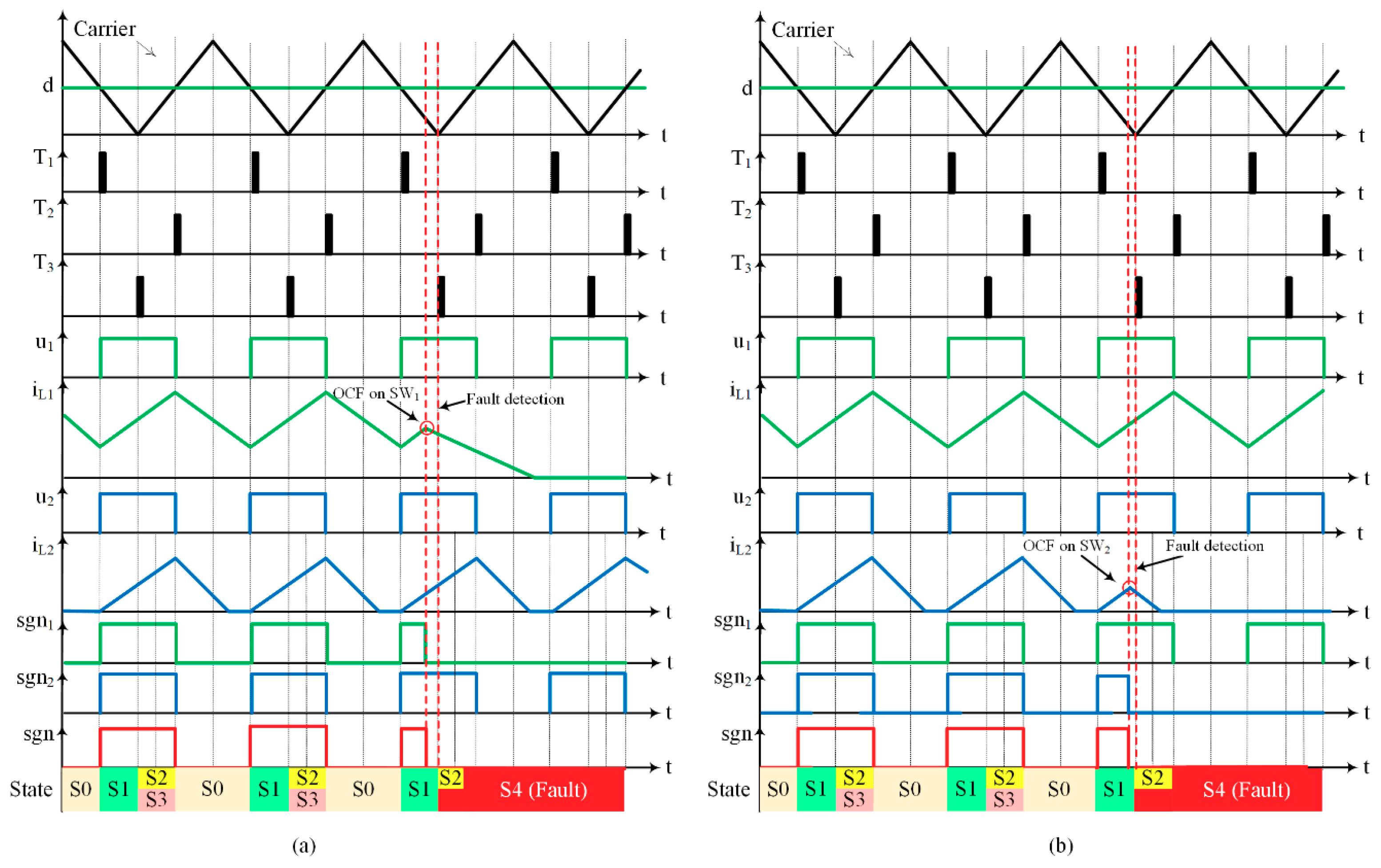
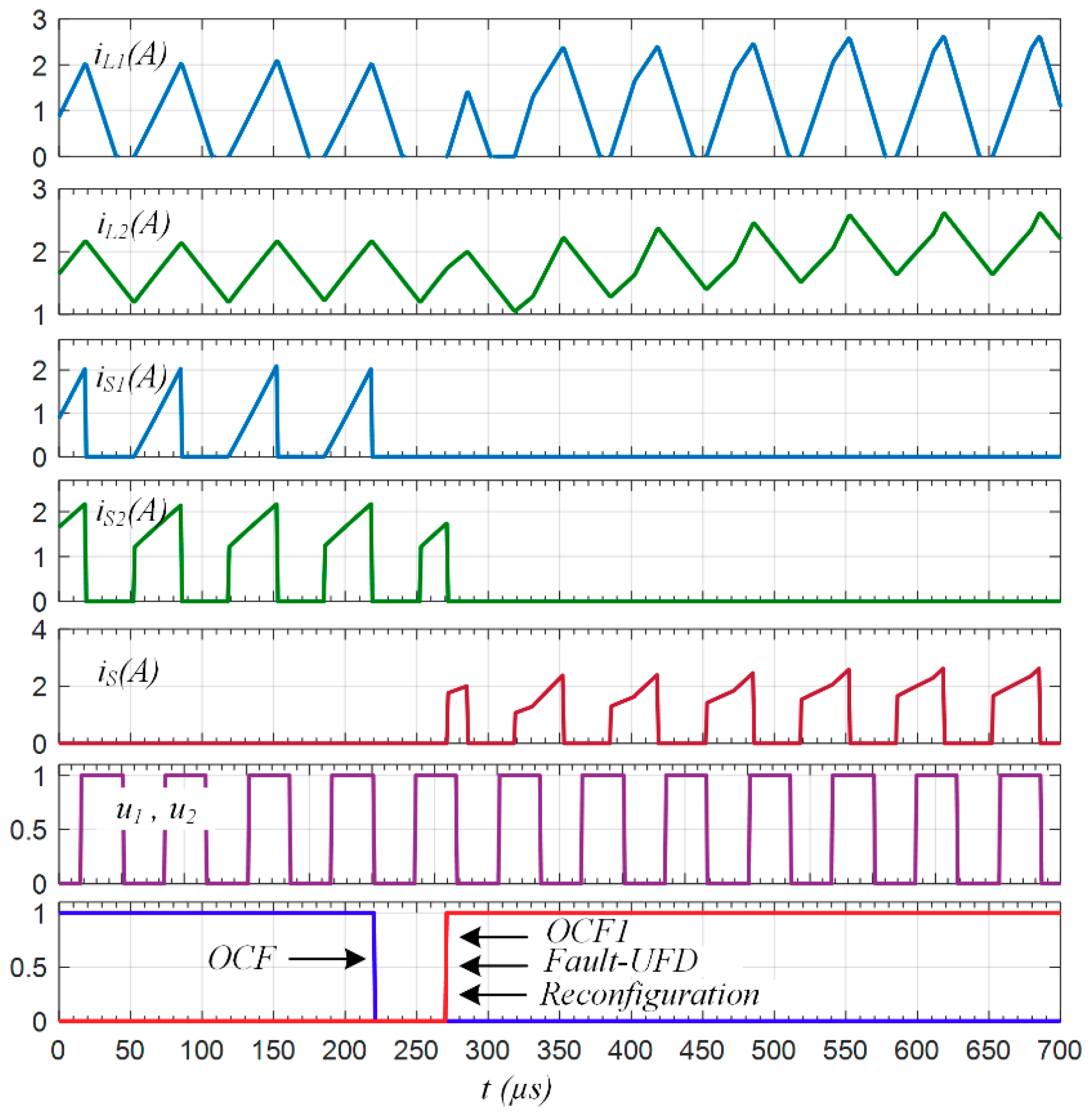
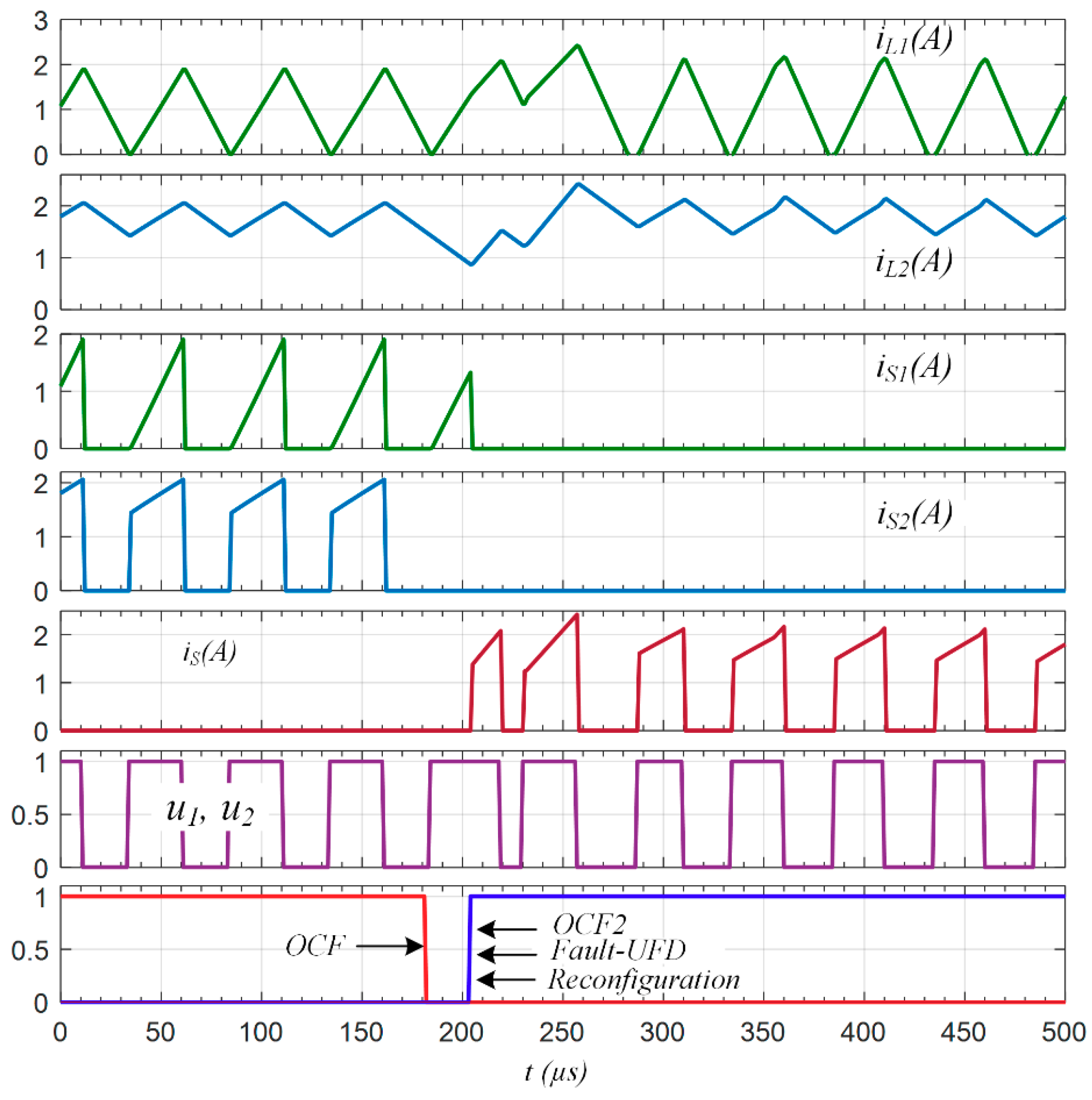
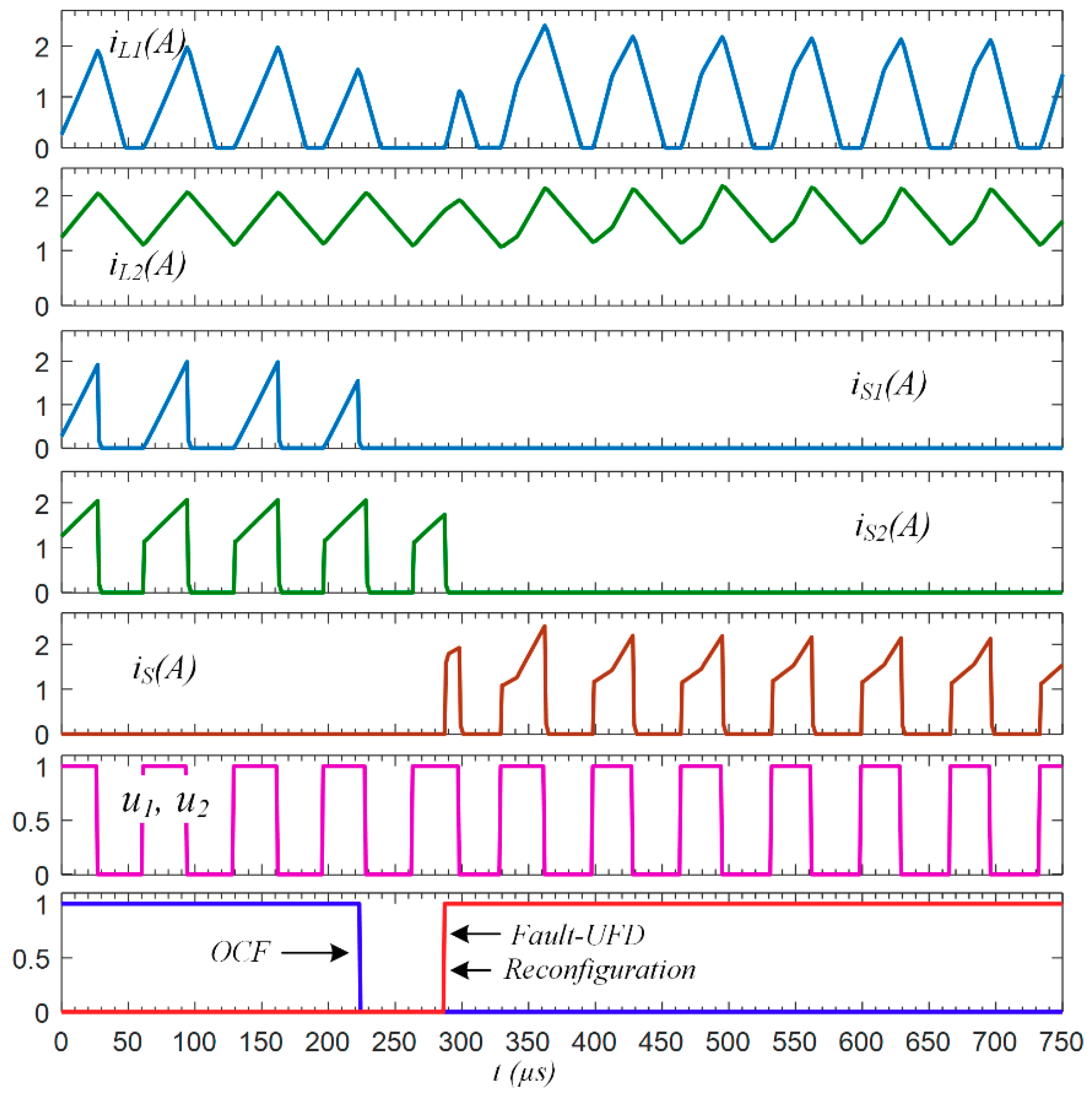
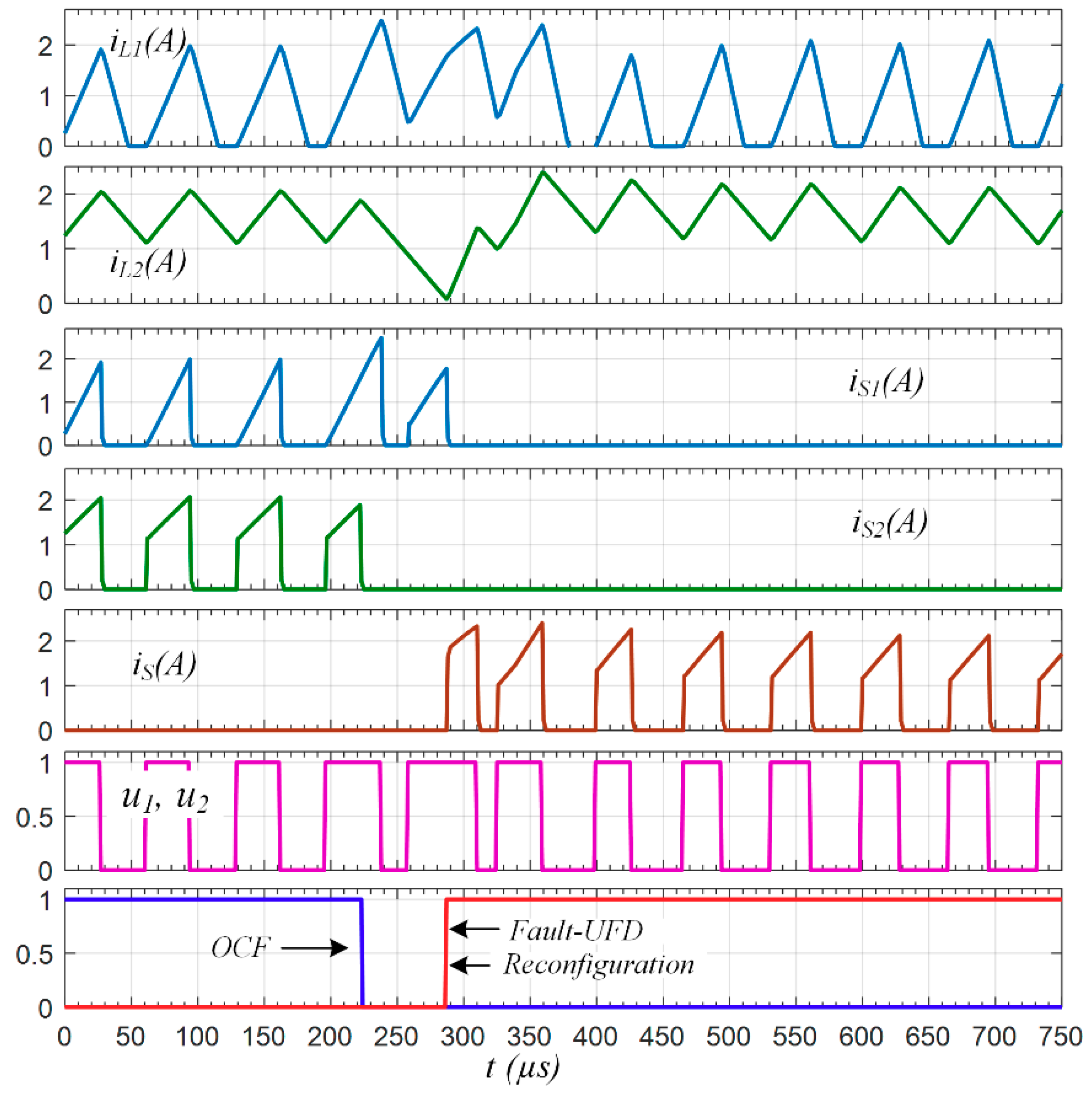
- However, in faulty OCF conditions, in state S2 (on-check), when the converter is in the middle of Cycle 1, one of the inductor currents iL1 or iL2 decreases and the sgn signal will be equal to “0” (sgn = 0). Therefore, a transition to S4 occurs and SM stays in this state (S0→S1→S2→S4). The FAULT signal (output of the SM) goes to “1” and a fault is declared. It is noticeable that, if the fault occurs after T3, the fault will be detected by the SM (Figure 7) in the next switching period (in the next S2);
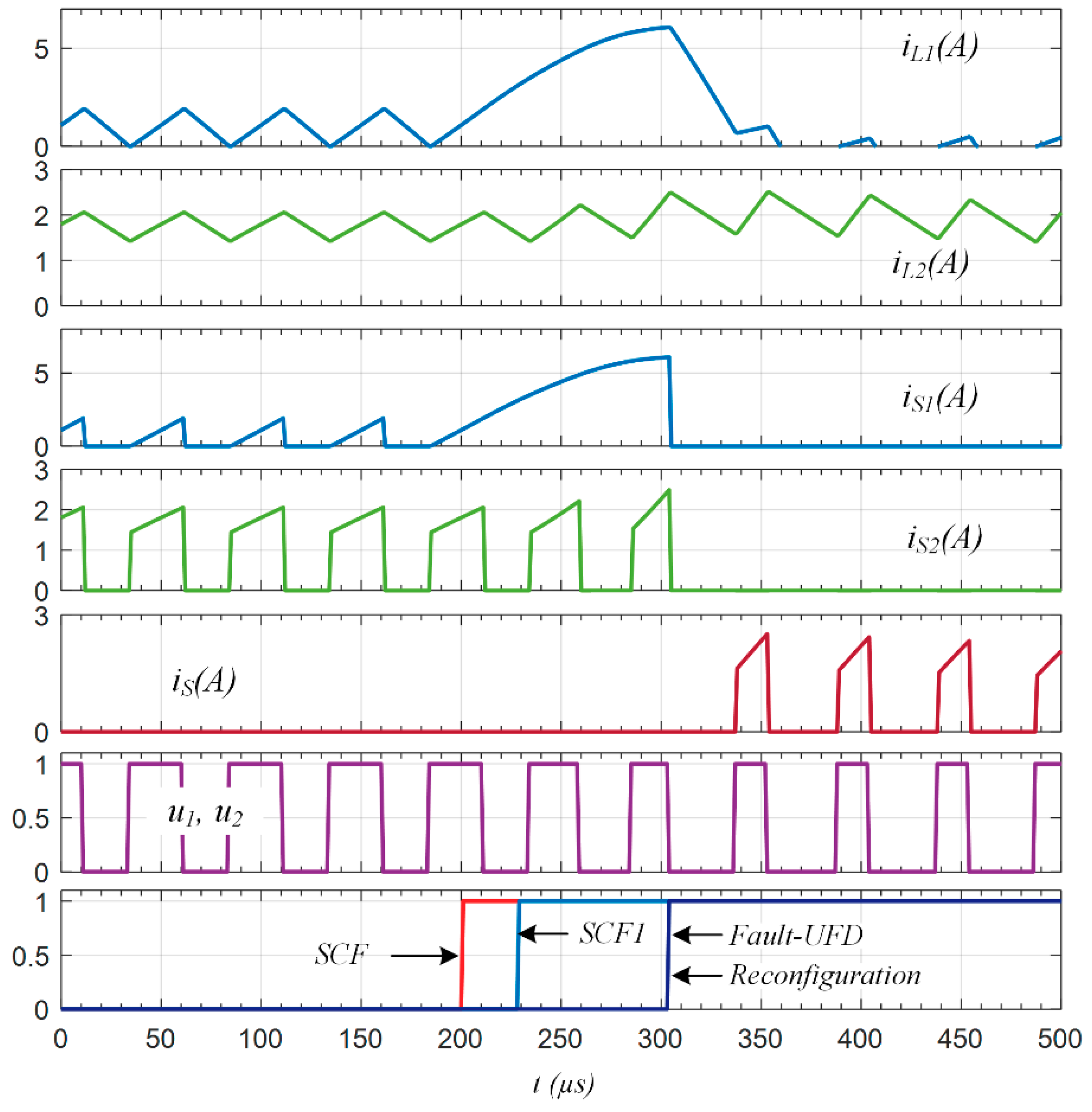
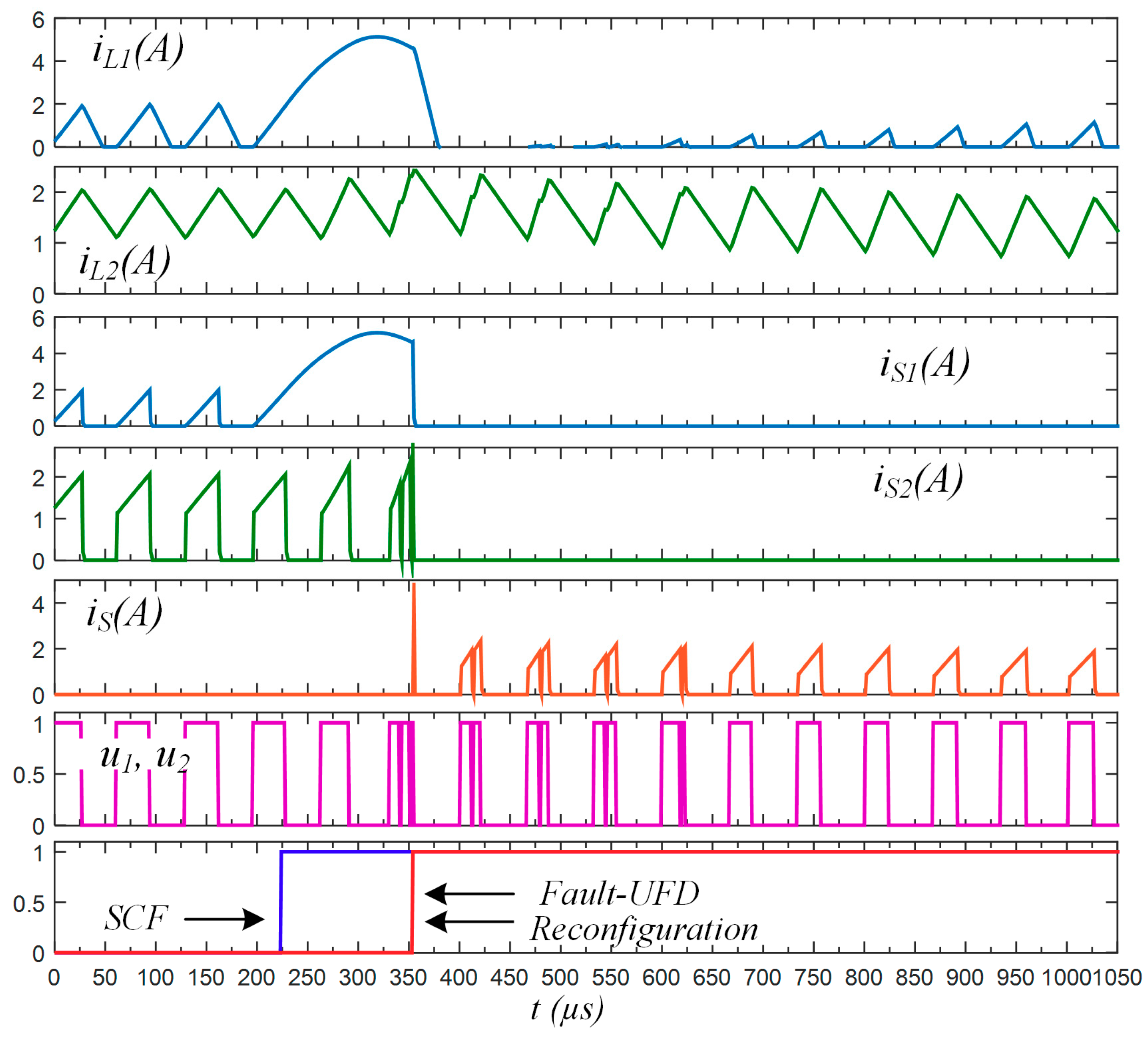
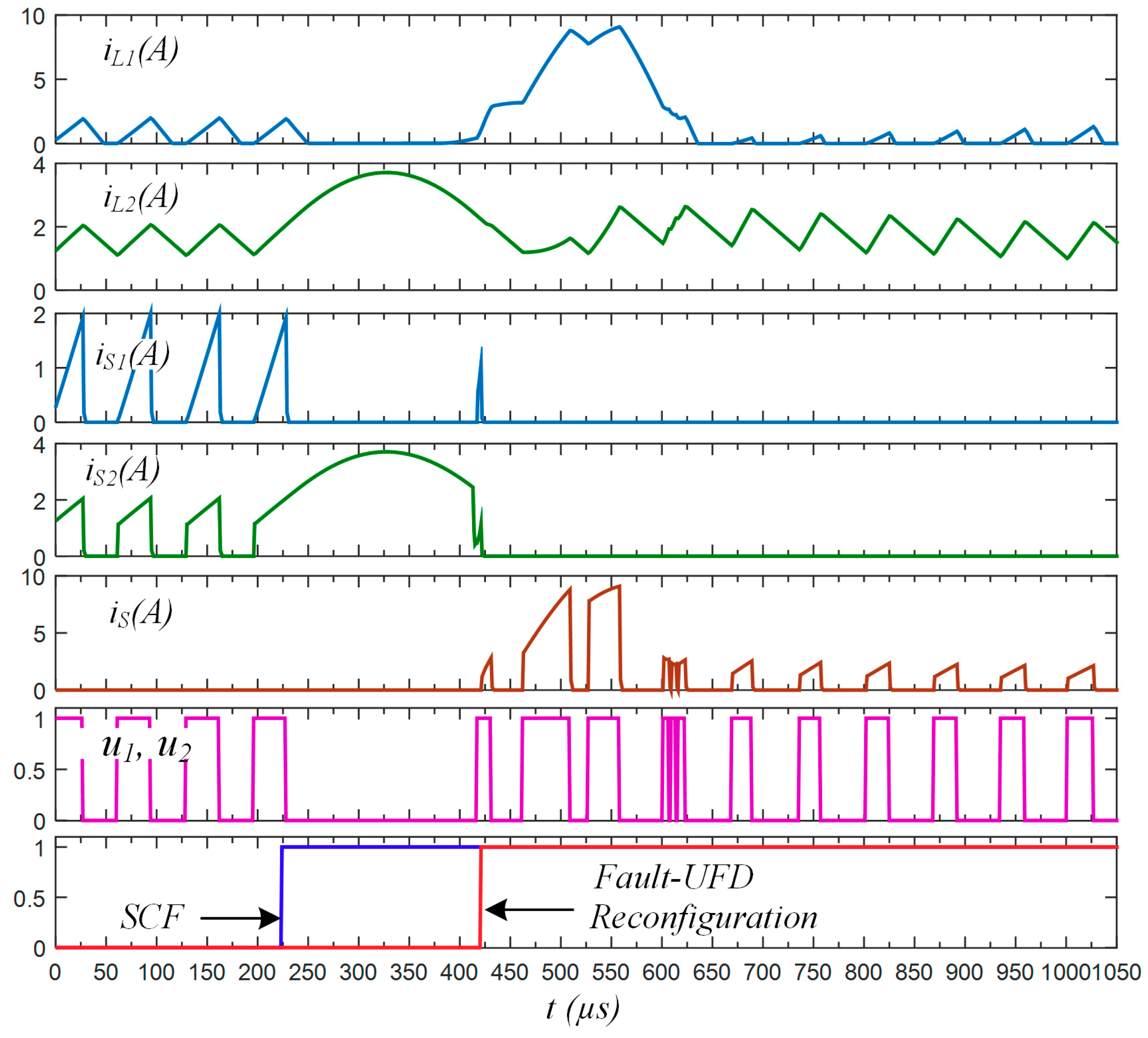
- In the case of an SCF, after fault occurrence, the state machine continues in normal operation for some switching periods, until fuse action. When the fuse breaks, the SCF becomes an OCF. In state S2, the sgn is not equal to “1” thus a transition to S4 occurs. As for an OCF, the FAULT signal (output of the SM) goes to “1” and the fault is declared.
4. Simulation Results
5. Fault-Tolerant Control Implementation on an FPGA Chip
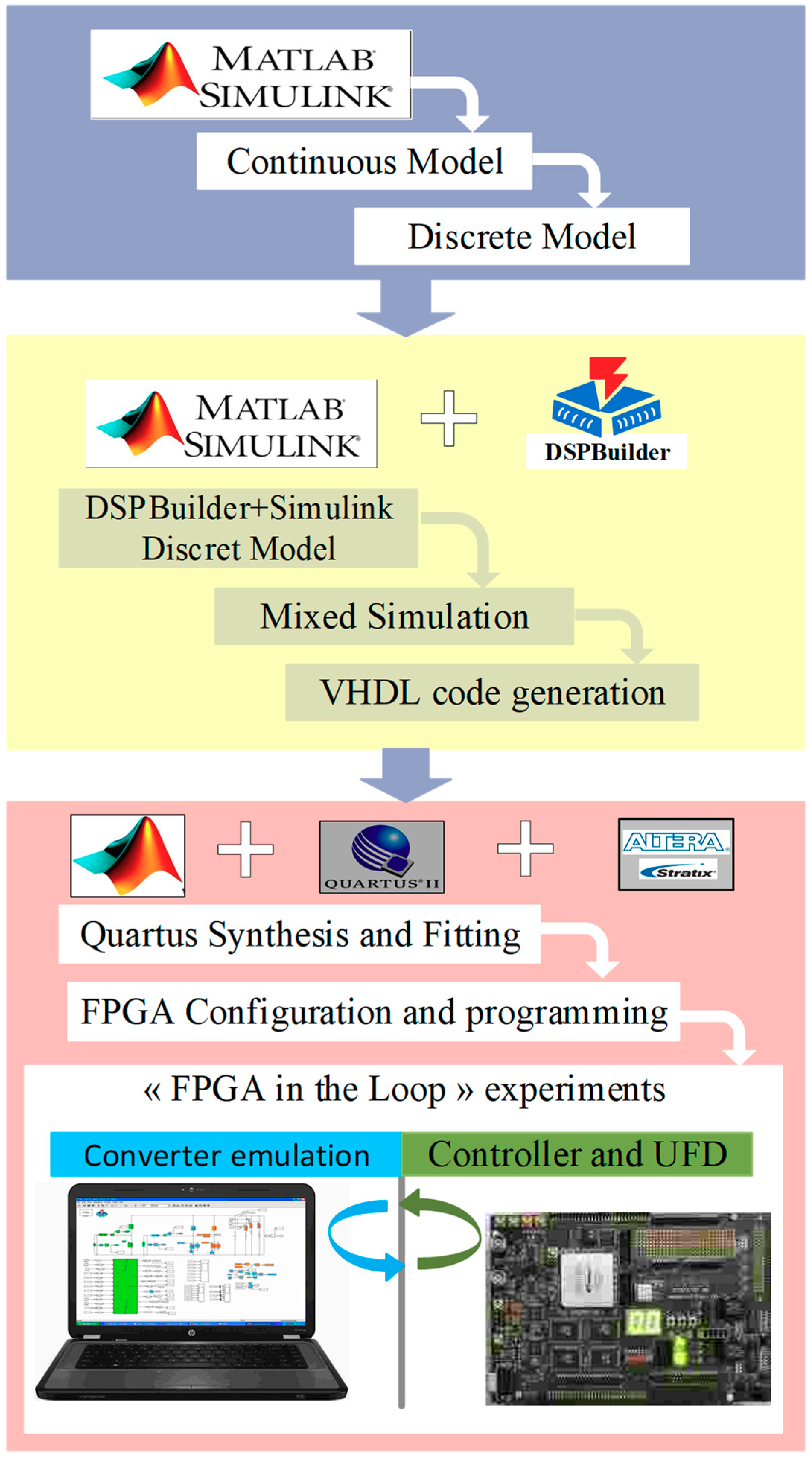
5.1. Principle of Experiment Based on Hardware-in-the-Loop (HIL)
- Studied system modeling and simulation in Matlab/simulink environment, in continuous time and then in discrete time;
- Control strategy and FD method have to be translated into a synthesizable VHDL (Very high-speed integrated circuit Hardware Description Language) model by using DSPbuilder toolbox (Intel Corporation, Santa Clara, CA, USA);
- Development board, which contains the FPGA, can be programmed and used in the HIL simulation.
5.2. FPGA in the Loop Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Qing, S.; Rezania, A.; Rosendahl, L.A.; Gou, X. An Analytical Model for Performance Optimization of Thermoelectric Generator With Temperature Dependent Materials. IEEE Access 2018, 6, 60852–60861. [Google Scholar] [CrossRef]
- Weng, C.C.; Huang, M.J. A simulation study of automotive waste heat recovery using a thermoelectric power generator. Int. J. Therm. Sci. 2013, 71, 302–309. [Google Scholar] [CrossRef]
- Korde, P.; Kamble, V. Efficient Utilization of waste Heat to Electrical Energy for Real-Time Applications. In Proceedings of the IEEE 9th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Bengaluru, India, 10–12 July 2018; pp. 1–6. [Google Scholar]
- Das, A.; Gao, Y.; Kim, T.T.H. A 220-mv power-on-reset based self-starter with 2-nW quiescent power for thermoelectric energy harvesting systems. IEEE Trans. Circuits Syst. Regul. Pap. 2017, 64, 217–226. [Google Scholar] [CrossRef]
- Wang, D.; Mo, J.; Wang, X.; Ouyang, H.; Zhou, Z. Experimental and numerical investigations of the piezoelectric energy harvesting via friction-induced vibration. Energy Convers. Manag. 2018, 171, 1134–1149. [Google Scholar] [CrossRef]
- Katic, J.; Rodriguez, S.; Rusu, A. An efficient boost converter control for thermoelectric energy harvesting. In Proceedings of the IEEE 20th International Conference on Electronics, Circuits, and Systems (ICECS), Abu Dhabi, United Arab Emirates, 8–11 December 2013; pp. 385–388. [Google Scholar]
- Zurbriggen, I.G.; Ordonez, M. PV Energy Harvesting Under Extremely Fast Changing Irradiance: State-Plane Direct MPPT. IEEE Trans. Ind. Electron. 2019, 66, 1852–1861. [Google Scholar] [CrossRef]
- Abdelhamid, M.; Singh, R.; Qattawi, A.; Omar, M.; Haque, I. Evaluation of on-board photovoltaic modules options for electric vehicles. IEEE J. Photovolt. 2014, 4, 1576–1584. [Google Scholar] [CrossRef]
- Armstrong, P.; Armstrong, R.W.; Kang, R.; Camilleri, R.; Howey, D.; McCulloch, M. A reconfigurable PV array scheme integrated into an electric vehicle. In Proceedings of the IET Hybrid and Electric Vehicles Conference, London, UK, 6–7 November 2013; pp. 1–7. [Google Scholar]
- Kaplan, A.; Kingry, N.; Uhing, P.; Dai, R. Time-optimal path planning with power schedules for a solar-powered ground robot. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1235–1244. [Google Scholar] [CrossRef]
- Diab-Marzouk, A.; Trescases, O. Sic-based bidirectional CUK converter with differential power processing and MPPT for a solar powered aircraft. IEEE Trans. Transport. Electrific. 2015, 1, 369–381. [Google Scholar] [CrossRef]
- Tran, T.V.; Chung, W.Y. High-efficient energy harvester with flexible solar panel for a wearable sensor device. IEEE Sens. J. 2016, 16, 9021–9028. [Google Scholar] [CrossRef]
- Brogan, Q.; O’Connor, T.; Ha, D.S. Solar and thermal energy harvesting with a wearable jacket. In Proceedings of the 2014 IEEE International Symposium on Circuits and Systems (ISCAS), Melbourne, Australia, 1–5 June 2014; pp. 1412–1415. [Google Scholar]
- Blaabjerg, F.; Chen, Z.; Kjaer, S.B. Power electronics as efficient interface in dispersed power generation systems. IEEE Trans. Power Electron. 2004, 19, 1184–1194. [Google Scholar] [CrossRef]
- Xu, C.; Pan, C.; Liu, Y.; Wang, Z.L. Hybrid cells for simultaneously harvesting multi-type energies for self-powered micro/nanosystems. Nano Energy 2012, 1, 259–272. [Google Scholar] [CrossRef]
- Khan, A.A.; Mahmud, A.; Ban, D.B. Evolution From Single To Hybrid Nanogenerator: A Contemporary Review On Multimode Energy Harvesting For Self-Powered Electronics. IEEE Trans. Nanotechnol. 2018, 18, 21–36. [Google Scholar] [CrossRef]
- Haji-Esmaeili, M.M.; Naseri, M.; Khoun-Jahan, H.; Abapour, M. Fault-Tolerant and Reliable Structure for a Cascaded Quasi-Z-Source DC-DC Converter. IEEE Trans. Power Electron. 2017, 32, 6455–6467. [Google Scholar] [CrossRef]
- Siouane, S.; Jovanović, S.; Poure, P. Service continuity of PV synchronous Buck/Buck-Boost converter with energy storage. Energies 2018, 11, 1369. [Google Scholar] [CrossRef]
- An, L.; Lu, D.D.C. Design of a single-switch DC-DC converter for a PV-battery-powered pump system with PFM+PWM control. IEEE Trans. Ind. Electron. 2015, 62, 910–921. [Google Scholar] [CrossRef]
- Alli, S.S.; Jovanović, S.; Poure, P.; Jamshidpour, E. MPPT and output voltage control of Photovoltaic systems using a Single-Switch DC-DC converter. In Proceedings of the 2016 IEEE International Energy Conference (ENERGCON), Leuven, Belgium, 4–8 April 2016; pp. 1–6. [Google Scholar]
- Jamshidpour, E.; Poure, P.; Saadate, S. Photovoltaic Systems Reliability Improvement by Real-Time FPGA-Based Switch Failure Diagnosis and Fault-Tolerant DC-DC Converter. IEEE Trans. Ind. Electron. 2015, 62, 7247–7255. [Google Scholar] [CrossRef]
- Jamshidpour, E.; Shahbazi, M.; Saadate, S.; Poure, P.; Gholipour, E. FPGA based fault detection and fault tolerance operation in DC-DC converters. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 18–20 June 2014; pp. 37–42. [Google Scholar] [CrossRef]
- Rubino, L.; Guida, B.; Liccardo, F.; Marino, P.; Cavallo, A. Buck-boost DC-DC converter for aeronautical applications. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics (ISIE), Bari, Italy, 4–7 July 2010; pp. 2690–2695. [Google Scholar]
- Poon, J.; Jain, P.; Konstantakopoulos, I.C.; Spanos, C.; Panda, S.K.; Sanders, S.R. Model-Based Fault Detection and Identification for Switching Power Converters. IEEE Trans. Power Electron. 2017, 32, 1419–1430. [Google Scholar] [CrossRef]
- Siouane, S.; Jovanovic´, S.; Poure, P. Service continuity of PV synchronous Buck/Buck-Boost converter with energy storage. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/ICPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Shahbazi, M.; Jamshidpour, E.; Poure, P.; Saadate, S.; Zolghadri, M.R. Open-and short-circuit switch fault diagnosis for nonisolated dc–dc converters using field programmable gate array. IEEE Trans. Ind. Electron. 2013, 60, 4136–4146. [Google Scholar] [CrossRef]
- Siouane, S.; Jovanovic´, S.; Poure, P. Open-Switch Fault-Tolerant Operation of a Two-Stage Buck/Buck–Boost Converter With Redundant Synchronous Switch for PV Systems. IEEE Trans. Ind. Electron. 2019, 66, 3938–3947. [Google Scholar] [CrossRef]
- Yin, H.; Zhao, C.; Li, M.; Ma, C. Utility function-based real-time control of a battery ultracapacitor hybrid energy system. IEEE Trans. Ind. Inform. 2015, 11, 220–231. [Google Scholar] [CrossRef]
- Ribeiro, E.; Cardoso, A.J.M.; Boccaletti, C. Open-circuit fault diagnosis in interleaved DC–DC converters. IEEE Trans. Power Electron. 2014, 29, 3091–3102. [Google Scholar] [CrossRef]
- Adouni, A.; Elmellah, K.; Chariag, D.; Sbita, L. DC-DC converter fault diagnostic in PV system. In Proceedings of the 2017 International Conference on Green Energy Conversion Systems (GECS), Hammamet, Tunisia, 23–25 March 2017; pp. 1–7. [Google Scholar]
- Givi, H.; Farjah, E.; Ghanbari, T. Switch and Diode Fault Diagnosis in Nonisolated DC-DC Converters Using Diode Voltage Signature. IEEE Trans. Ind. Electron. 2018, 65, 1606–1615. [Google Scholar] [CrossRef]
- Jamshidpour, E.; Poure, P.; Saadate, S. Unified Switch Fault Detection for Cascaded Non-Isolated DC-DC Converters. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/ICPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar]
- Roshandel Tavana, N.; Dinavahi, V. A General Framework for FPGA-Based Real-Time Emulation of Electrical Machines for HIL Applications. IEEE Trans. Ind. Electron. 2015, 62, 2041–2053. [Google Scholar] [CrossRef]
- Buccella, C.; Cecati, C.; Latafat, H. Digital Control of Power Converters-A Survey. IEEE Trans. Ind. Informat. 2012, 8, 437–447. [Google Scholar] [CrossRef]
- Monmasson, E.; Idkhajine, L.; Cirstea, M.; Bahri, I.; Tisan, A.; Naouar, M.W. FPGAs in Industrial Control Applications. IEEE Trans. Ind. Informat. 2011, 7, 224–243. [Google Scholar] [CrossRef]
- Karimi, S.; Poure, P.; Saadate, S. An HIL-Based Reconfigurable Platform for Design, Implementation, and Verification of Electrical System Digital Controllers. IEEE Trans. Ind. Electron. 2010, 57, 1226–1236. [Google Scholar] [CrossRef]
- Potamianos, P.; Mitronikas, E.; Safacas, A. Open-Circuit Fault Diagnosis for Matrix Converter Drives and Remedial Operation Using Carrier-Based Modulation Methods. IEEE Trans. Ind. Electron. 2014, 61, 531–545. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elements | Vin | RL | L2 | C2 | VB | L1 | C1 | fs |
|---|---|---|---|---|---|---|---|---|
| Value | 8 V | 25 Ω | 100 µH | 22 µF | 12 V | 50 µH | 100 µF | 20 KHz |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jamshidpour, E.; Poure, P.; Saadate, S. Common Switch Fault Diagnosis for Two-Stage DC-DC Converters Used in Energy Harvesting Applications. Electronics 2019, 8, 293. https://doi.org/10.3390/electronics8030293
Jamshidpour E, Poure P, Saadate S. Common Switch Fault Diagnosis for Two-Stage DC-DC Converters Used in Energy Harvesting Applications. Electronics. 2019; 8(3):293. https://doi.org/10.3390/electronics8030293
Chicago/Turabian StyleJamshidpour, Ehsan, Philippe Poure, and Shahrokh Saadate. 2019. "Common Switch Fault Diagnosis for Two-Stage DC-DC Converters Used in Energy Harvesting Applications" Electronics 8, no. 3: 293. https://doi.org/10.3390/electronics8030293