3.1. Proposal of Parallel Strategy
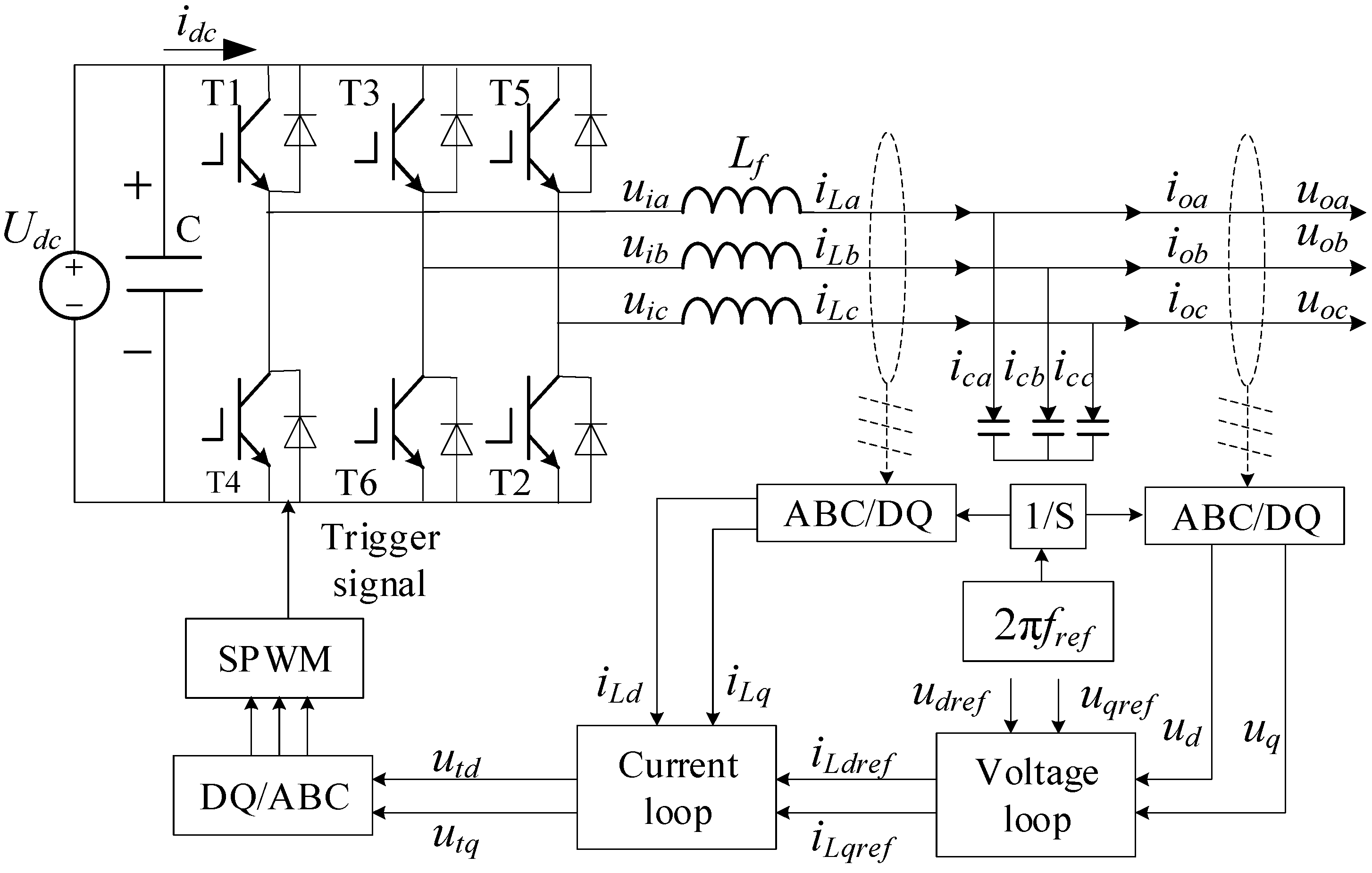
After the failure of large power grid, the converter in the microgrid needs to change from PQ operation mode to another control mode. In this paper, the converter parallel control strategy is proposed. Firstly, the converter unit adopts the constant voltage and constant frequency (V/F) control, as shown in
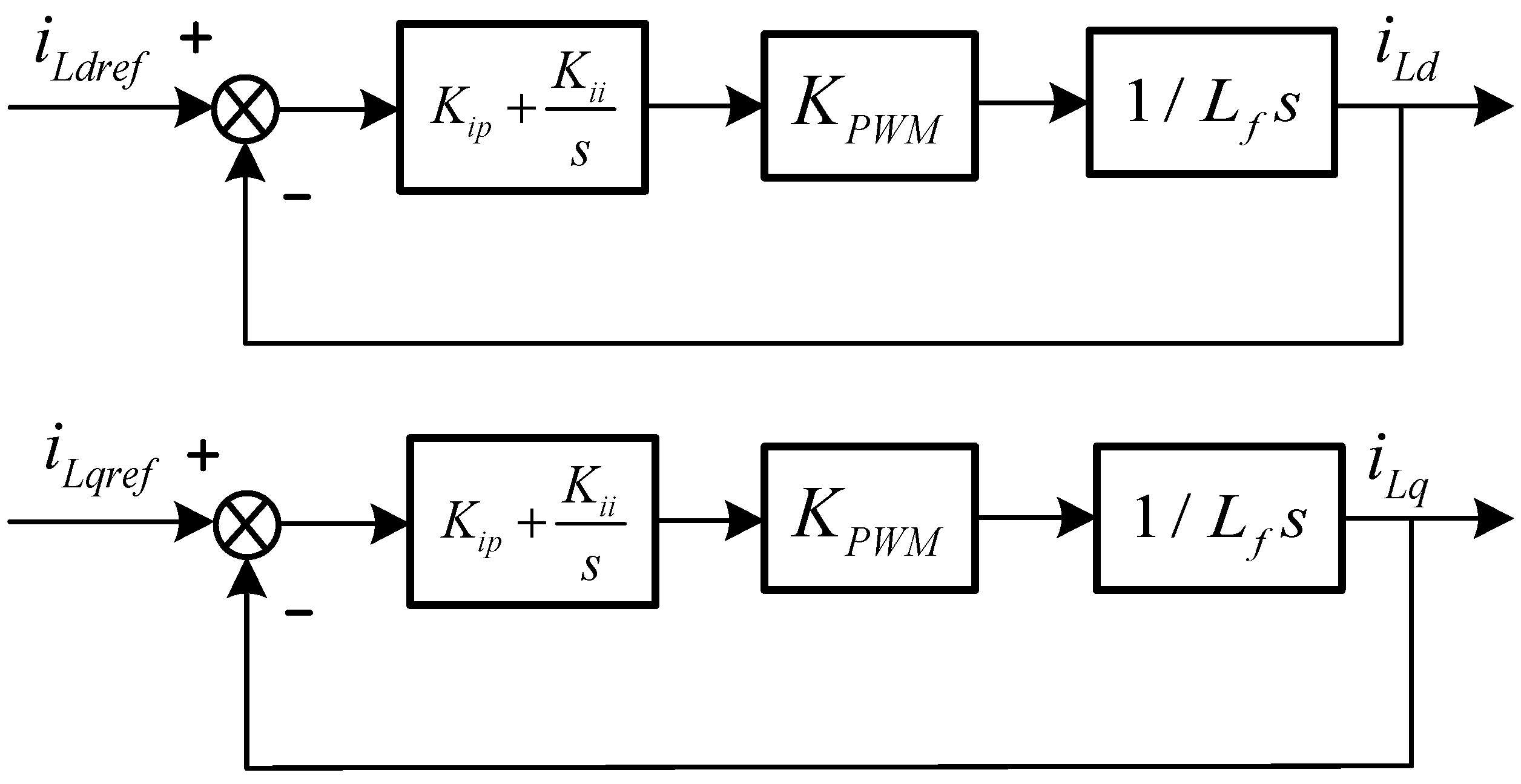
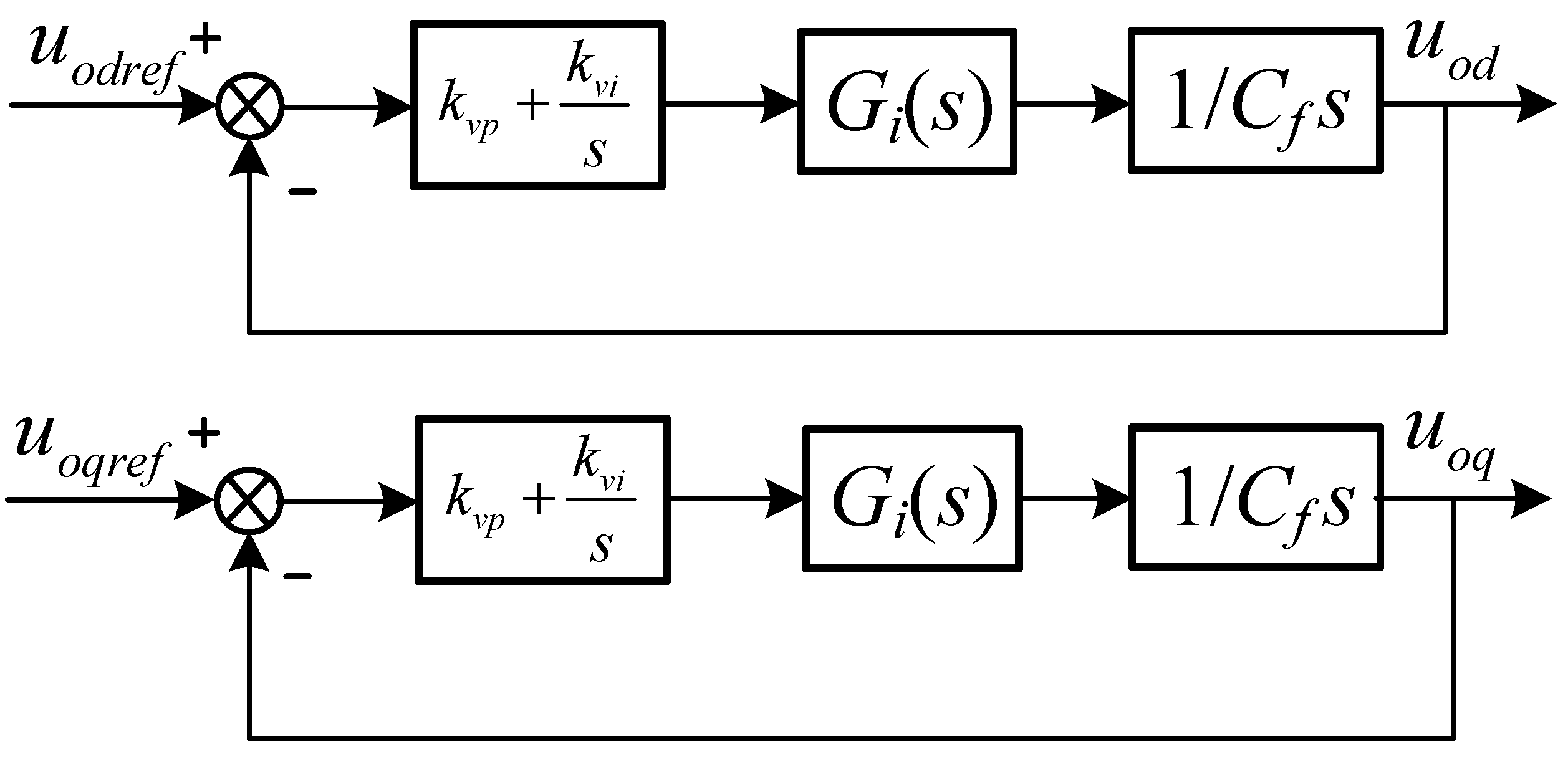
Figure 1. Each converter adopts the V/F control strategy, so the output voltage amplitude and the frequency are constant. The phase angle used for the coordinate transformation of the converter is generated by integration of frequency. Through the voltage and current dual loop modulation mentioned above, the converter outputs rated voltage amplitude and frequency for preparation of converters parallel.
After the V/F control is used, the converters will only produce circulating current due to phase angle inconsistency. Then the phase angle self-synchronization strategy is used to make the phase angle of output voltage of all converters in the system consistent.
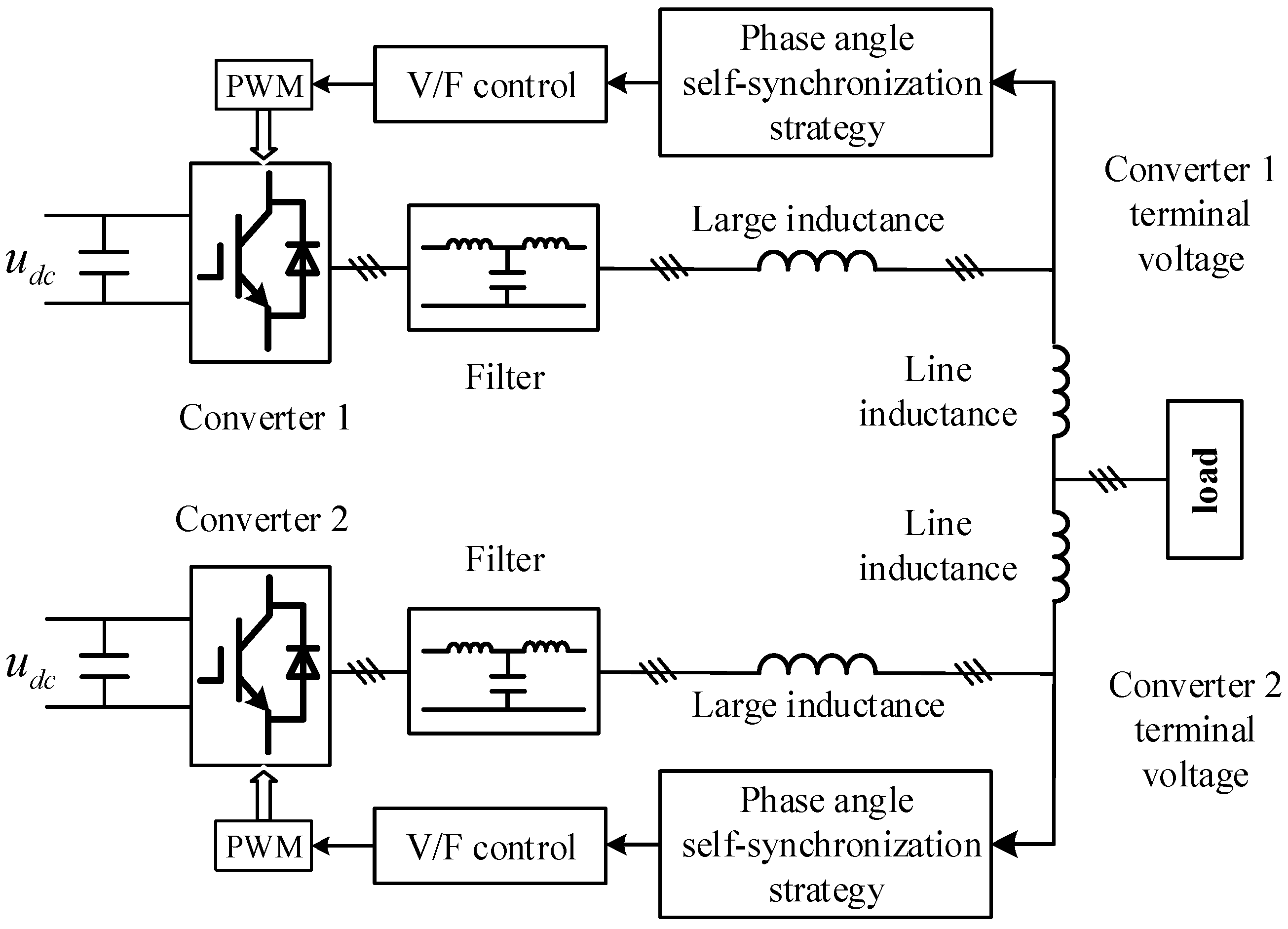
As shown in
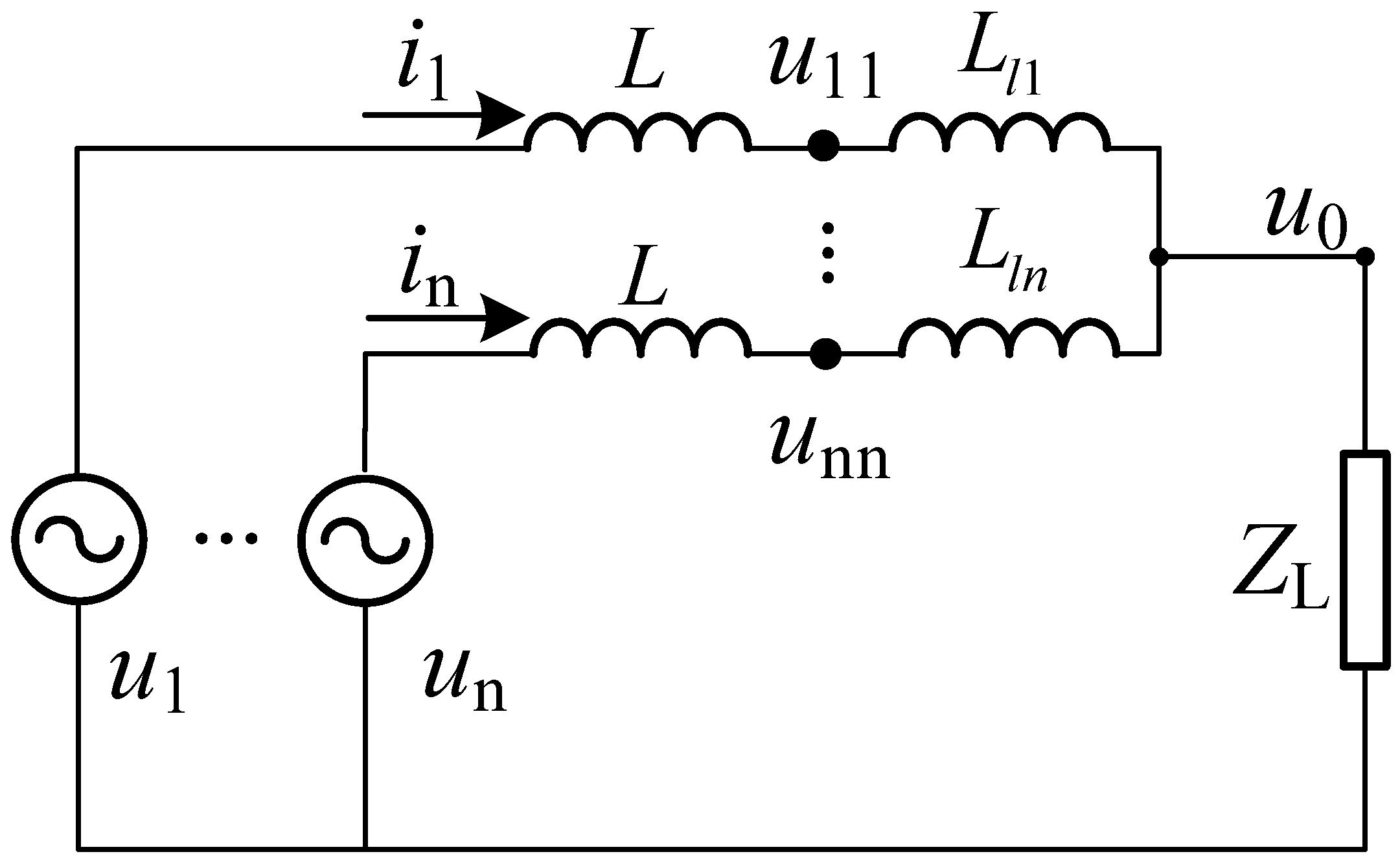
Figure 7, each converter in the parallel system uses the V/F control strategy. For each converter in the system, they have a common voltage signal, that is the load voltage. However, because the converter is in the distributed generation position, the distance between the converter to the load is far and the line distance is different. There is no communication line as well. Therefore, the converter has difficulty obtaining accurate load voltage as a common voltage reference. Therefore, a large inductance is added to the output port of the converter (see the next section for analysis). By doing this, the effect of line inductance
Ll can be omitted, so the voltage drop ratio of the line inductance is reduced, therefore, the load voltage can be approximately equal to the voltage at the end of the converter, which can be taken as the phase angle reference.
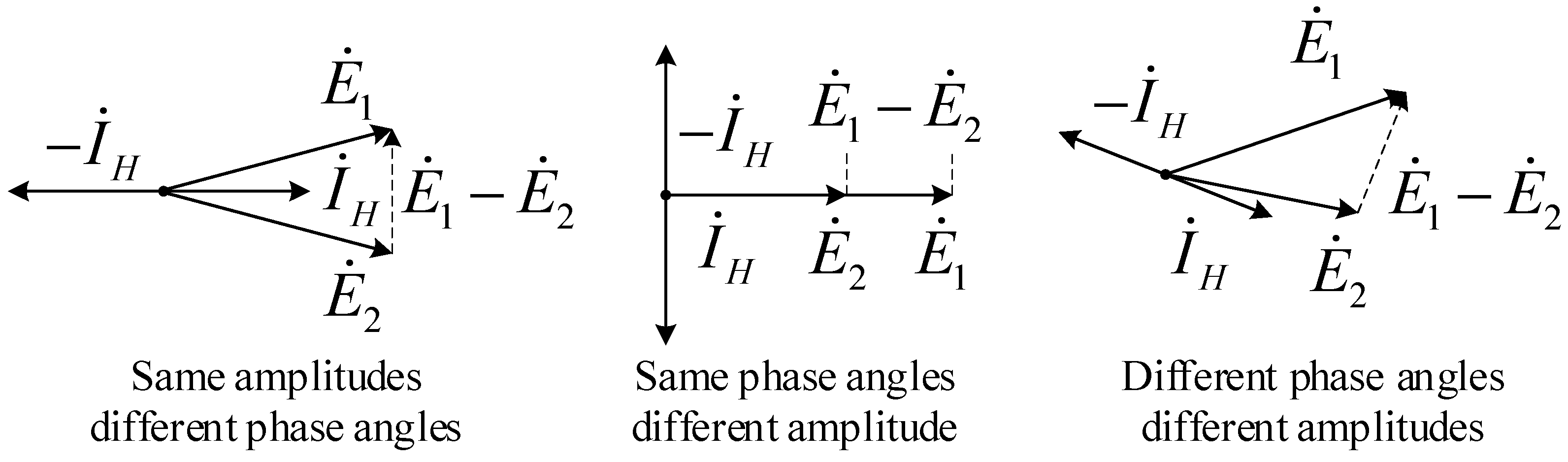
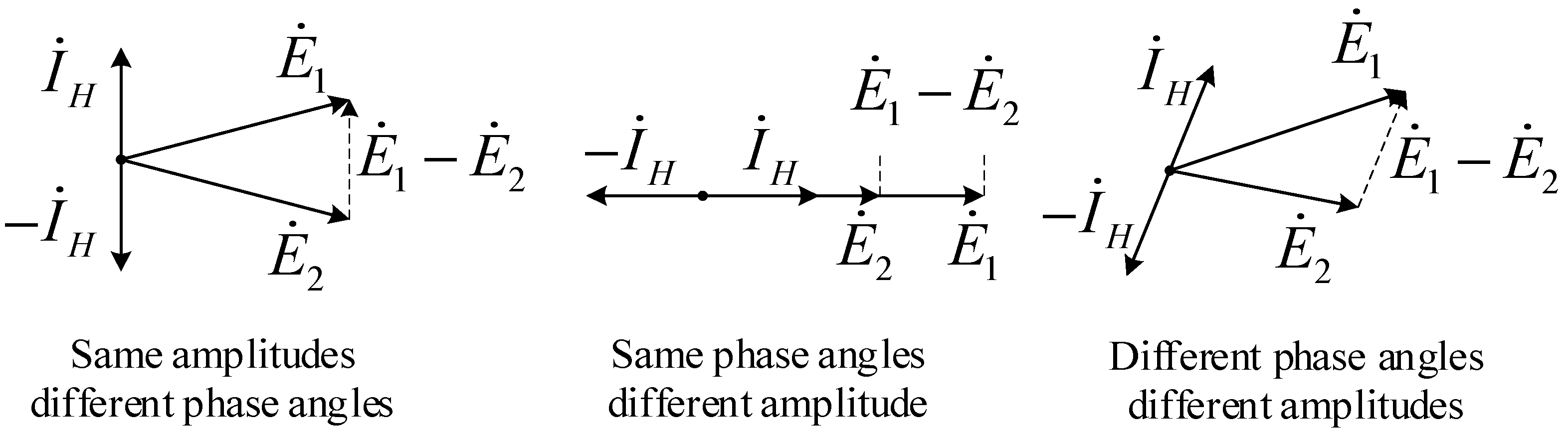
The output voltages of converters have a certain phase angle, φ1, φ2, φn. If the phase angle is different, the system will have a circulating current. Considering the transient performance of the converter system after stabilization, set the phase angle of 0 to 0°, then the phase angle difference between the converters and the load voltage is θ1, θ2, and θn respectively.
The phase angle difference will cause circulating current between the converters when the amplitude and the frequency of their output voltage are same. In order to solve the problem of the difference of the phase angle between the output voltages of each converter, this paper proposes a phase angle self-synchronization strategy.
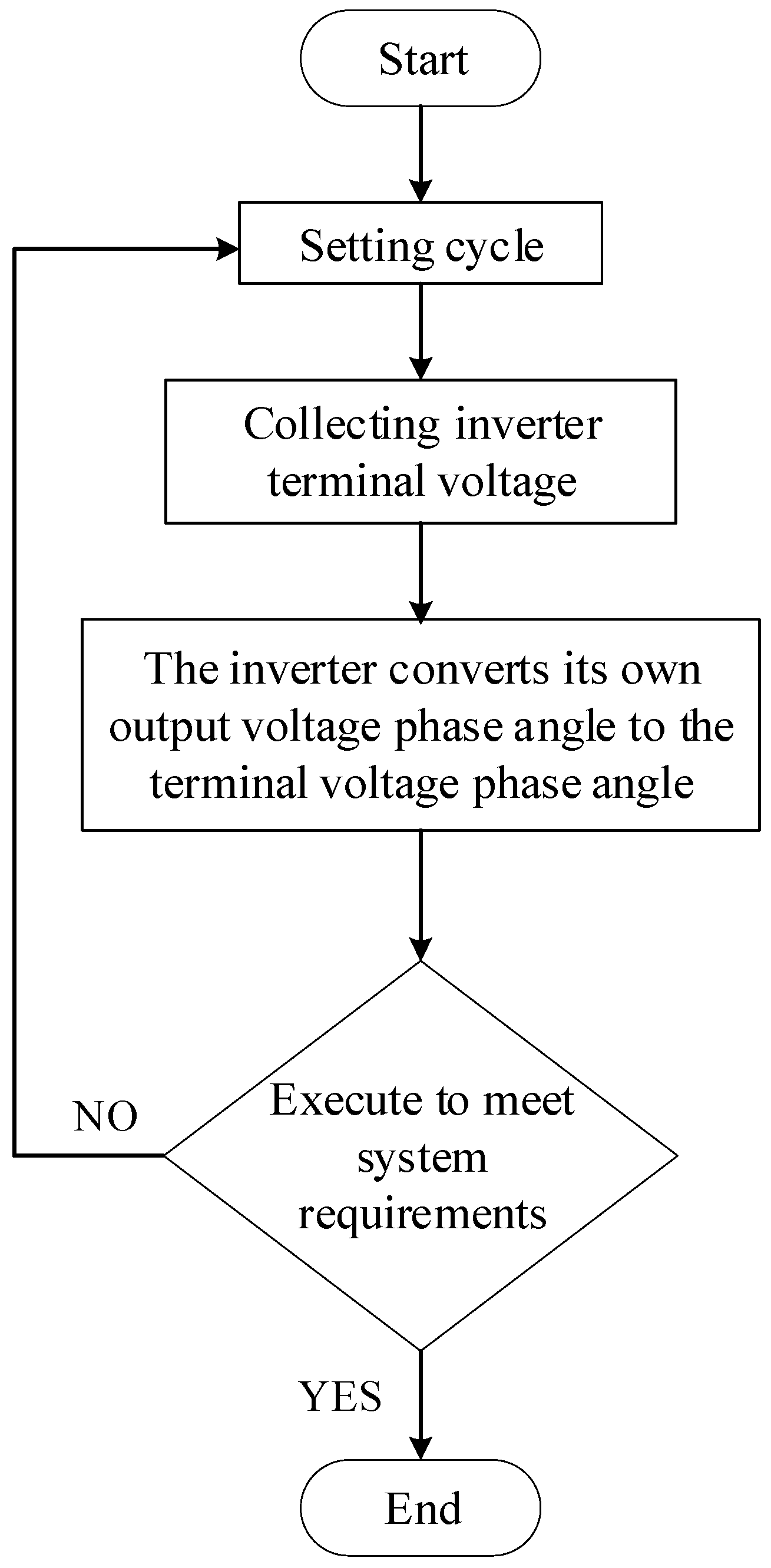
It can be seen from the above analysis that by adding a large inductance to the terminal of converter, the measured voltage of the load can be approximately replaced by the measured voltage of the terminal of converter. Each converter takes its own terminal voltage as the phase angle reference. That is, the phase angles of the output voltage of each converter in the system are converted into the phase angles of the measured converter terminal voltages of its own terminal, therefore, the output voltage phase angles of the converters are consistent, so that the parallel system has no circulating current and the load power is evenly distributed. The changing process of the phase angle of the output voltage of each converter in the system is as follows:
For a microgrid system, the converter in the microgrid uses PQ control when connected to the grid. After the failure of the large power grid, the microgrid enters the island mode, and the converter in the system needs to operate in parallel. According to the proposed parallel control strategy of the converter, after entering island mode, the converter in the microgrid uses the V/F control, at this time, difference of the output voltage lies in its phase angle, and this article also puts forward the phase angle self-synchronization to solve the problem.
First, considering the distance from the load to each converter is different, therefore, the circuit inductance from each converter to the load is different. In order to make scattered converters have a common benchmark phase angle in the case without the use of a communication line, this article put forward a solution by adding a large inductance on the end of each converter, to ignore the differences of inductance between each converter and the load. There is no need for a communication line or long-distance measurement route, for only the terminal voltage after the converter’s own large inductance needs to be measured.
After all the converters in the system collect the terminal voltage, the terminal voltage of each converter is approximately equal to the load voltage due to the large inductance, so each converter obtains a common voltage reference—load voltage. Phase angle self-synchronization strategy lies in that each converter converts its output voltage phase angle into the collected voltage phase angle at the converter end. Then the converter output voltage phase angle is consistent, at this point, the amplitude, frequency, and phase angle of all output voltages are the same, which achieve the goal of the stable operation of the parallel converter.
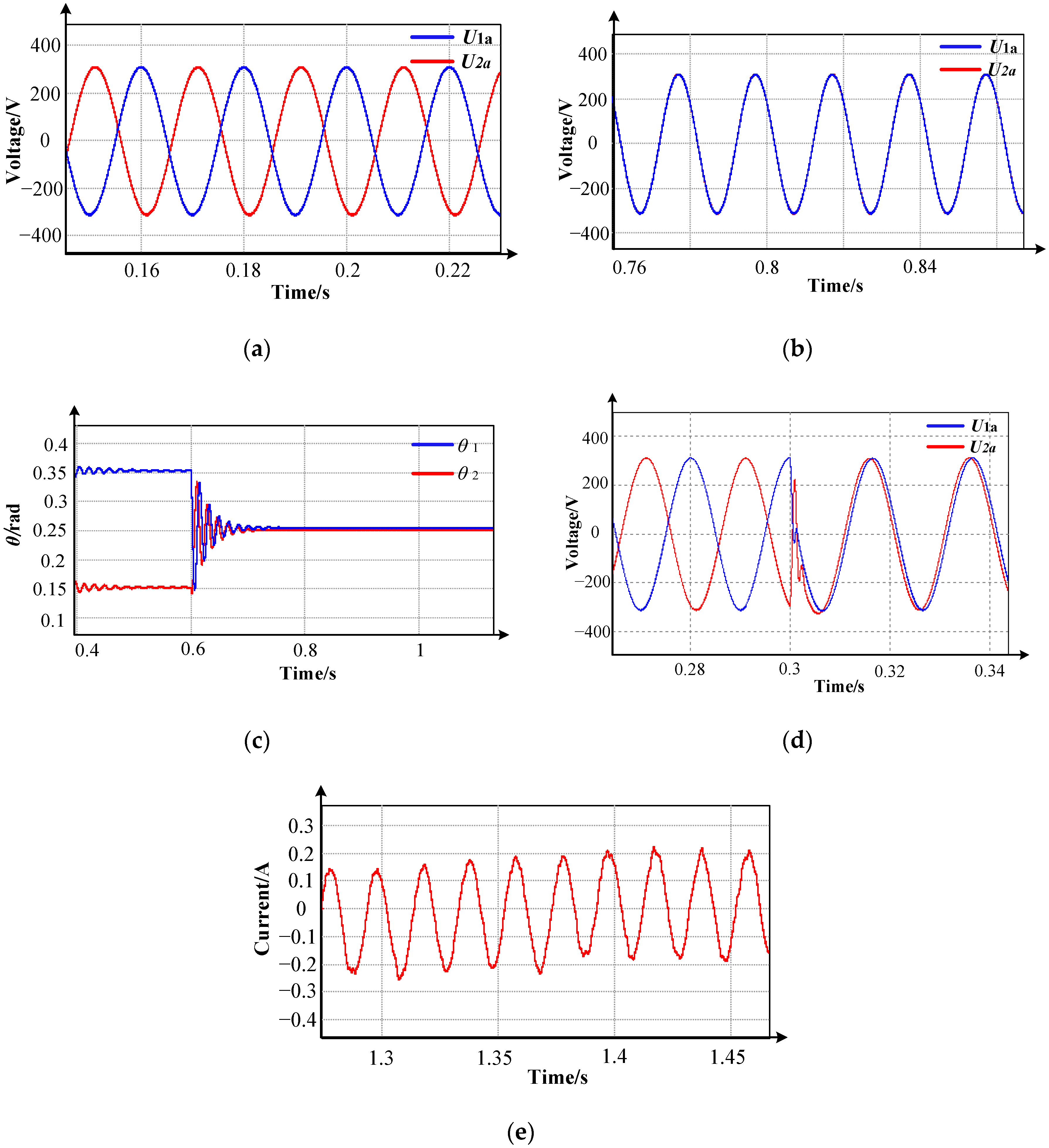
In actual operation, after the failure of the large power grid, the microgrid is transferred to island mode, which requires all converters to operate in parallel. Therefore, the converter parallel control strategy proposed in this paper is adopted. First of all, all converters in the microgrid use the V/F control mode, as shown in
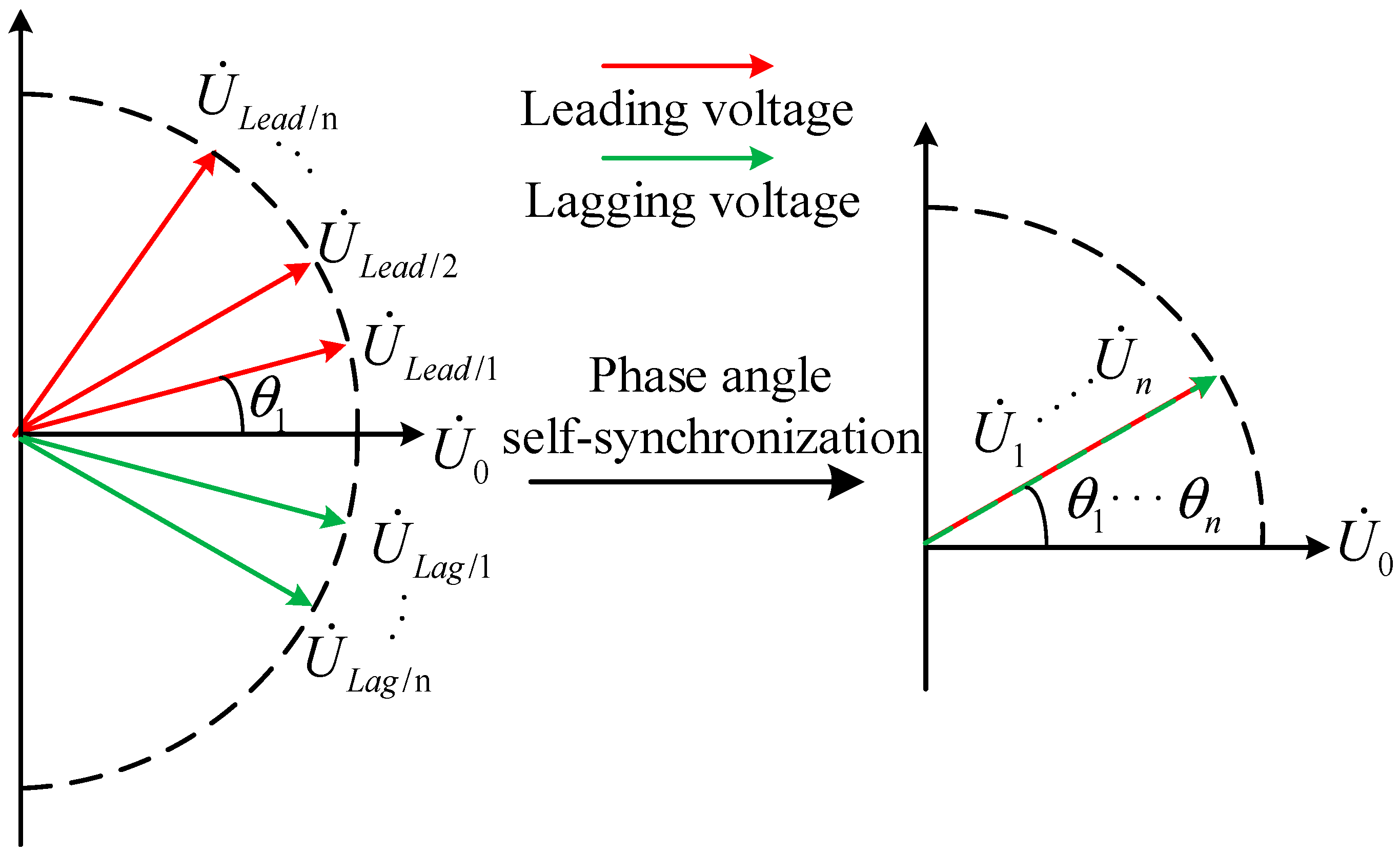
Figure 8, the amplitude and frequency of output voltage are the same, but the phase angles of the output voltage are not.
In
Figure 8,
0 represents the load voltage, which is approximately equal to the terminal voltage detected by each converter after adding large inductance. The red line in
Figure 8 represents that the phase angle of the output voltage is ahead of the load voltage. The green line in
Figure 8 represents that the phase angle of the output voltage is behind the load voltage. At this time, the phase angle of the output voltage in the system is different, and the system cannot run stably. The phase angle self-synchronization strategy proposed in this paper depends on the fact that each converter measures its own terminal voltage, which is approximately equal to the load voltage, as shown in
Figure 8, which means each converter has a common phase angle reference. For example, the phase angle of the output voltage represented by the red line is ahead of the load voltage, and the converter detects the phase difference
θ1 between its output voltage and the terminal voltage (which is approximately equal to the load voltage). The phase angle self-synchronization control strategy makes the phase angle difference between the output voltage of the converter and the terminal voltage to 0, that is, the phase angle of the output voltage is converted to the phase angle of the load voltage. Similar to the output voltage that is ahead of the load voltage, the green line represents the output voltage lags behind the load voltage, detected in the converter’s output voltage and load voltage phase angle difference, and the phase angle synchro control strategy eliminates the phase angle difference. As shown in
Figure 8, after adjusting and stabilizing the system, the voltage and phase angle of output voltage of every converter come to a new balance. At this point, the amplitude, frequency, and phase angle of all output voltages in the microgrid are the same, achieving the purpose of stable operation of the system.
In summary, since the line distances between the converter and the load are different, the line inductance is not the same. By adding a large inductance to the converter end to ignore the line inductance, the load voltage is approximately equal to the terminal voltage of the converter. Replacing the remote load voltage with the terminal voltage of the converter not only eliminates the instability of the communication line, but also makes measurement extremely convenient. Accordingly, the phase angles of the output voltages are converted into the measured phase angles of the terminal voltages, so that the phase angles of the output voltages are identical. In addition, due to the V/F control strategy, the amplitude and frequency of output voltage are consistent. The phase angle, amplitude, and frequency of output voltage in the parallel system are equal, there is no circulating current between the converters, and the load power is distributed evenly.
3.2. Influence Analysis of Large Inductance and Its Design
3.2.1. Analysis of the Influence of Large Inductance on the System
The position of distributed generation is different. Therefore, the distance between converter and the load is also different, which lead to differences in line inductance. The common line parameters are shown in
Table 1. The converter terminal voltage will have a big difference when no large inductance is added, affecting the operation of the parallel strategy of the converter.
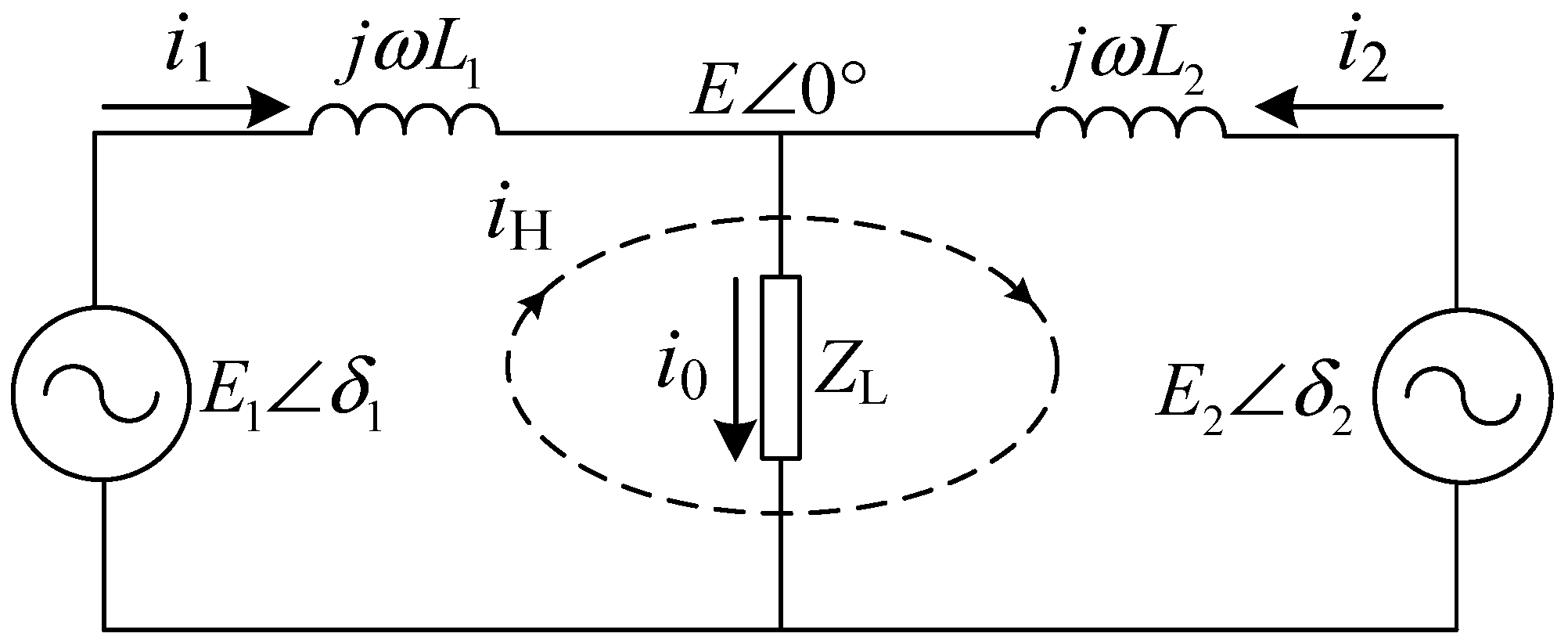
As shown in
Figure 7, taking two converters in parallel as an example, the system has no communication line. By adding a large inductance
L to reduce the effect of the line inductance
Ll, the voltage drop ratio of the line inductance is reduced, applying the superposition theorem to calculate the load voltage as shown in Equation (4):
The respective terminal voltages are as shown in Equations (5)–(7):
The ratio of large inductance to line inductance is as shown in Equation (8):
When there is no large inductance, the collected terminal voltage is:
The collected voltage difference between the two terminals is:
Therefore, without large inductance, it is difficult for each converter to obtain a common voltage phase reference. If the large inductance is large enough, then
A and
B will approach 0, then the voltage relationship can be obtained as shown in Equation (11):
The conclusion can be obtained through analysis. For the multi-converter parallel system, the voltage of the converter is approximately the same, which can be used as the common phase angle reference. The addition of large inductance L will also reduce the influence of line inductance. Considering the influence of large inductance on terminal voltage, circulating current and load voltage respectively, the specific analysis is as follows.
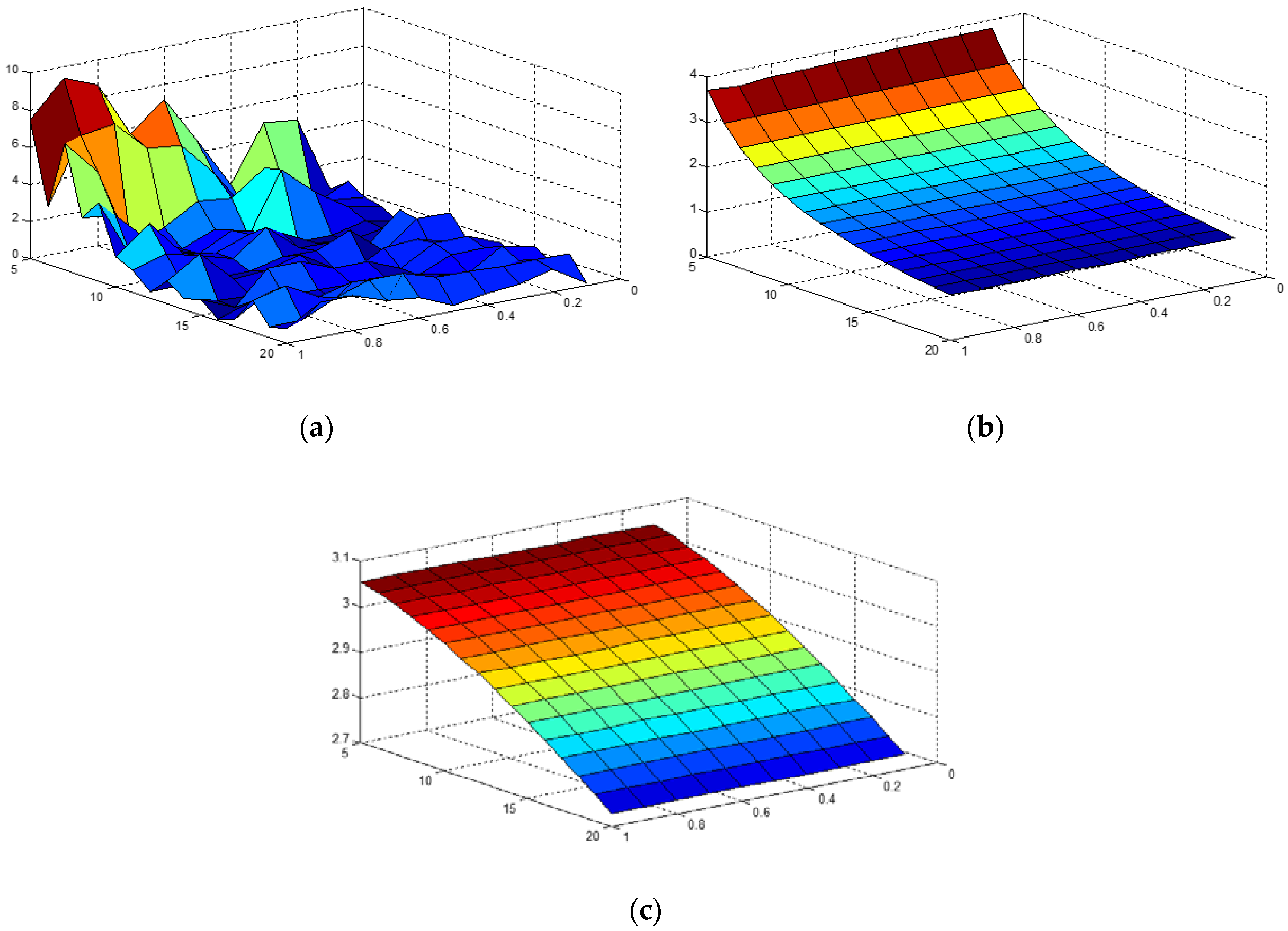
Figure 9 shows the influence of large inductance on terminal voltage difference, circulating current, and voltage amplitude change of the parallel system.
Where, the X-axis of
Figure 9a represents the large inductance added at the converter end, rising from 5 to 10 mH. When x = 5, the system adds a 5 mH inductance at the converter end, and the maximum value is added to 10 mH. The Y-axis of
Figure 9a represents the ratio of the line inductance between the two side converters and the load, rising from 0.1 to 1. When y = 0.1, it means that the distance between the two side converters and the load is 10 times different, and the line inductance is 10 times different. When y = 1, this means that the distance between the converters on both sides and the load line is equal, so is the circuit inductance. The z-axis of
Figure 9a represents the voltage difference between the terminals of converters on both sides. In order to facilitate the observation of the graph, this paper used the per unit value. As can be seen from
Figure 9a, the terminal voltage difference of the two side converters increases with the increase of the distance difference between the two side converters and the load line, the voltage difference between the terminals of the converters on both sides decreases with the increase of the large inductance added at the end of the converter, which proves that the large inductance has a close effect on the load voltage, and the addition of large inductance can effectively suppress the difference of the line inductance between the converters on both sides and the load.
Similar to
Figure 9a, the X-axis of
Figure 9b represents the large inductance added at the end of the converter, rising from 5 to 10 mH. The Y-axis of
Figure 9b represents the ratio of the inductance of the line between the two side converters and the load, rising from 0.1 to 1. The z-axis of
Figure 9b represents the circulating current of the converter parallel system. In order to facilitate the observation of the graph, the per unit value is used. As can be seen from
Figure 9b, after the addition of large inductance at the converter end, the difference in line inductance between the two side converters and the load has little influence on the circulating current between the systems, and as the adding of large inductance at the converter end increases, the circulating current between the systems becomes smaller and smaller.
Similarly, the X-axis of
Figure 9c represents the large inductance added at the end of the converter, rising from 5 to 10 mH. The Y-axis of
Figure 9c represents the ratio of the inductance of the line between the two side converters and the load, rising from 0.1 to 1. The z-axis of
Figure 9c represents the decreasing degree of output voltage of the converter after adding large inductance. In order to facilitate the observation of the graph, the per unit value is used. As can be seen from
Figure 9c, after the addition of large inductance at the converter end, the difference in inductance between the two side converters and the load line has little influence on the decline of the output voltage of the converter. Moreover, as the large inductance at the converter end increases, the decline of the output voltage of the converter becomes greater and greater.
In summary, as the inductance increases, the difference in the terminal voltage of different converters in the system is gradually reduced, as the difference of the terminal voltage is smaller, the common phase angle reference obtained by each converter becomes more consistent, which not only facilitates the parallel operation of the converter, but also reduces the steady-state error of the parallel strategy.
As the inductance increases, the circulating current within the system gradually decreases, the magnitude of the load voltage drops more. It can be known that the addition of large inductance has advantages and disadvantages. While reducing the circulating current and reducing the voltage difference between the terminals of different converters, it also causes the load voltage to decrease. When designing a large inductance, it is necessary to take both aspects into consideration.
3.2.2. Large Inductance Design
As shown in
Figure 7, taking two converters in parallel as an example, large inductance with two converter parallel systems is designed, and then extended to multiple converter parallel systems. The system circulating current is as shown in Equation (12), and then brought into the converter output voltage as shown in Equations (12)–(15):
Set the ratio of the circulating current to the rated current to a, to ensure that the system operation requirements are met, then design the value of
L, and the details are shown in Equation (17).
It can be seen from Equation (17) that the design of the large inductance L can be divided into two parts.
For the first part of Equation (17), there is a difference in the output voltage at the beginning of the system operation, which affects the system operation. The first side of Equation (17) is approximately 0 after the system is stable. Therefore, it is necessary to consider a certain size of current limiting inductor.
For the second part of Equation (17), depending on the line length of the distributed power supply to the load, since the line length is proportional to its line inductance, the greater the difference in line length between the two converters to the load, the larger the value of the large inductance L.
The value of a indicates the degree to which the system allows for circulating current, and can be designed to different values depending on the requirements of different systems. For multiple converter parallel systems, the distance from each converter to the load is different, and the inductance of the line is different. When designing the large inductance L, it is calculated based on the line inductance at the longest distance and the line inductance at the nearest distance. Then the line distances of other converters to the load are within the calculation interval, and the designed large inductance can meet the requirements of all converters.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}