1. Introduction
In recent years, due to small unmanned aerial vehicles’ (UAV) characteristics regarding maneuverability, flexibility and location difficulties, research on this type of UAV has drawn wide attention. With the unprecedented development of small aircrafts, the autonomous flight control of UAVs has become a research priority in the field of aviation [
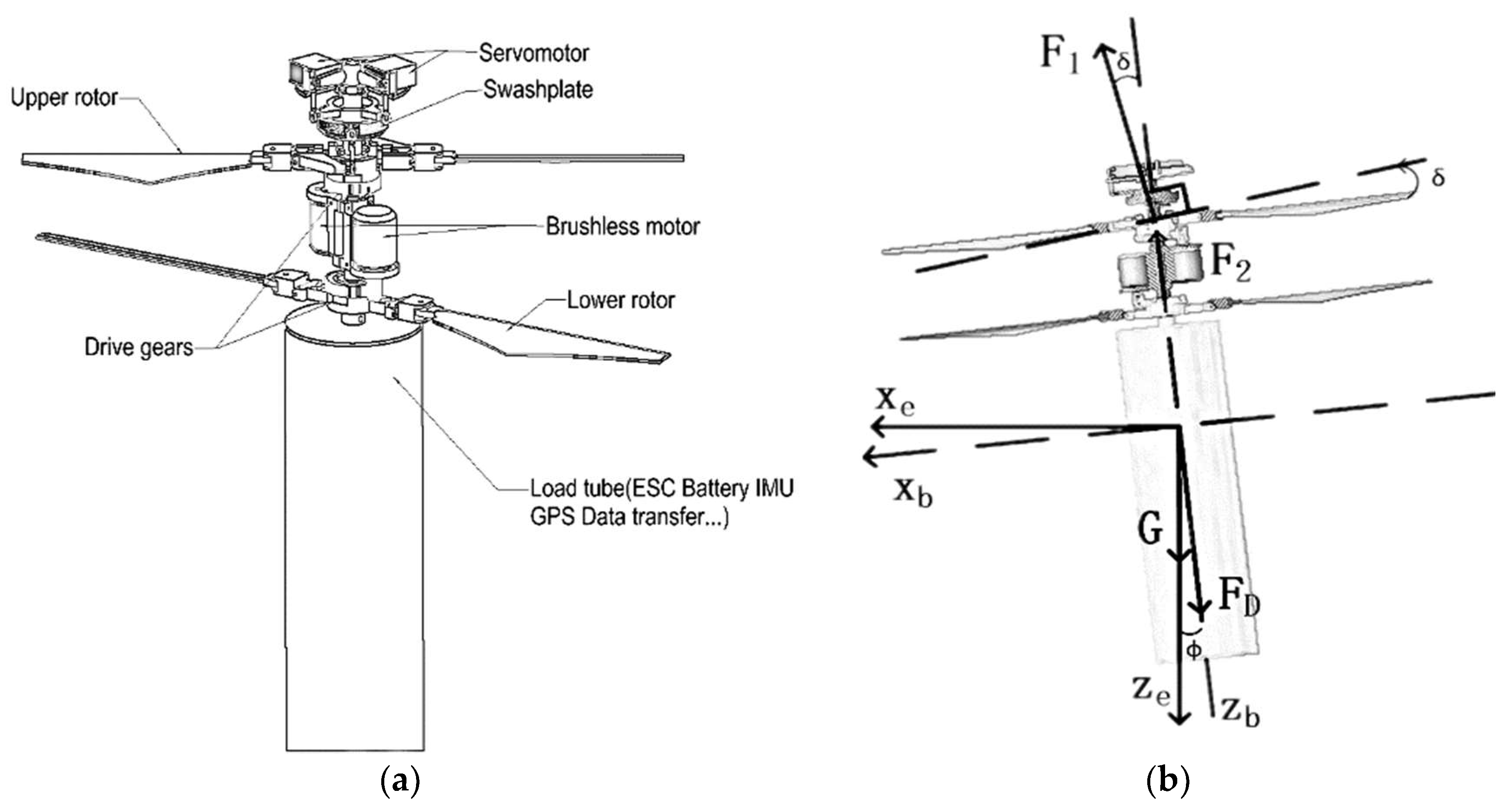
1]. Compared with fixed-wing aircrafts, the coaxial rotor uses a pair of coaxial reversing rotors which compensate for each other’s torque, instead of balancing the yaw moment of the aircraft without the tail rotor [
2]. Therefore, the aircraft has a compact structure, a small radial size, and a higher power efficiency. The data indicate that it is 35–40% smaller than the single rotor structure with a tail rotor, and in the same hovering conditions, the coaxial-rotor consumes 5% less energy than the single rotor [
3]. In addition, with the reduction of the radial size of the aircraft along the rotor, the inertia of the aircraft decreases and its controllability and maneuverability are enhanced. The design without the tail rotor has also eliminated some hidden problems [
4]. Research on coaxial-rotor helicopters has already had significant achievements, but the small coaxial-rotor UAV has received special attention in recent years. The small size of the aircraft and the different maneuvering modes brings about differences in control methods. The operation mode of the coaxial vehicle is different from that of an ordinary vehicle which is also a typical underactuated system [
5]. For the small coaxial-rotor UAV, the six-degree-of-freedom non-linear coupling problem is prominent, and decoupling is important for stability and control of the vehicle.
The general attitude control system of the UAV coordinates and controls the longitudinal, lateral and heading channels. The design of the longitudinal channel controller is the most critical and complex of the three channels, and its control rate significantly affects the UAV’s flight performance [
6,
7]. In the literature [
8], the decoupling control method is used to design the aircraft control system. Both the adaptability and control effect of the system, however, need improvement. In Reference [
9], by combining the advantages of feedback linearization and variable structure control, the attitude controller of the aircraft was designed. However, it was unable to effectively weaken the sliding mode chattering of the system, and the controller parameters could not be adjusted in real time according to the disturbance, which caused poor control performance. Reference [
7] proposed a control law which was designed using the adaptive backstepping method and which did not require any knowledge of aircraft aerodynamics. Simulation results showed good performance of the feedback law, but the actual implementation was complicated and difficult to achieve. In Reference [
10], a fuzzy logic control of the longitudinal motion of an aircraft based on the Takagi–Sugeno modeling approach was presented, and while the stability and tracking effect were good, the problem of system coupling had not been solved well and the control precision needed improvement. There are many studies of the decoupling controls of aircraft, but few are focused specifically on coaxial aircrafts [
11].
The main role of this paper is to propose a decoupling algorithm that improves the reliability of the attitude control for the longitudinal motion stability of the coaxial rotor UAV. In order to satisfy the stability requirements of a coaxial-rotor UAV’s longitudinal motion [
12], a suitable control algorithm and controller needed to be designed. Before this, we required a dynamic model which featured a qualified and effective vehicle longitudinal motion [
13]. In accordance to the lab-developed coaxial rotor UAV, a rigorous and effective non-linear mathematical model of longitudinal motion was established, and an under-actuated controller was designed using the fuzzy sliding mode. Simulation results showed that the position control performance of the aircraft was improved when the decoupling algorithm was applied to the coaxial rotor longitudinal motion control system. The position and attitude were significantly improved [
14] and the method was simple and effective.
This paper is organized as follows: In
Section 2, according to the self-developed coaxial vehicle, the modeling and derivation processes are given. In
Section 3, the decoupling algorithm design is introduced. The controller design and stability analysis based on the fuzzy sliding mode control are described in
Section 4. Finally, the simulation results and comparison with the decoupling algorithm are shown in
Section 5.
4. Design of the Controller
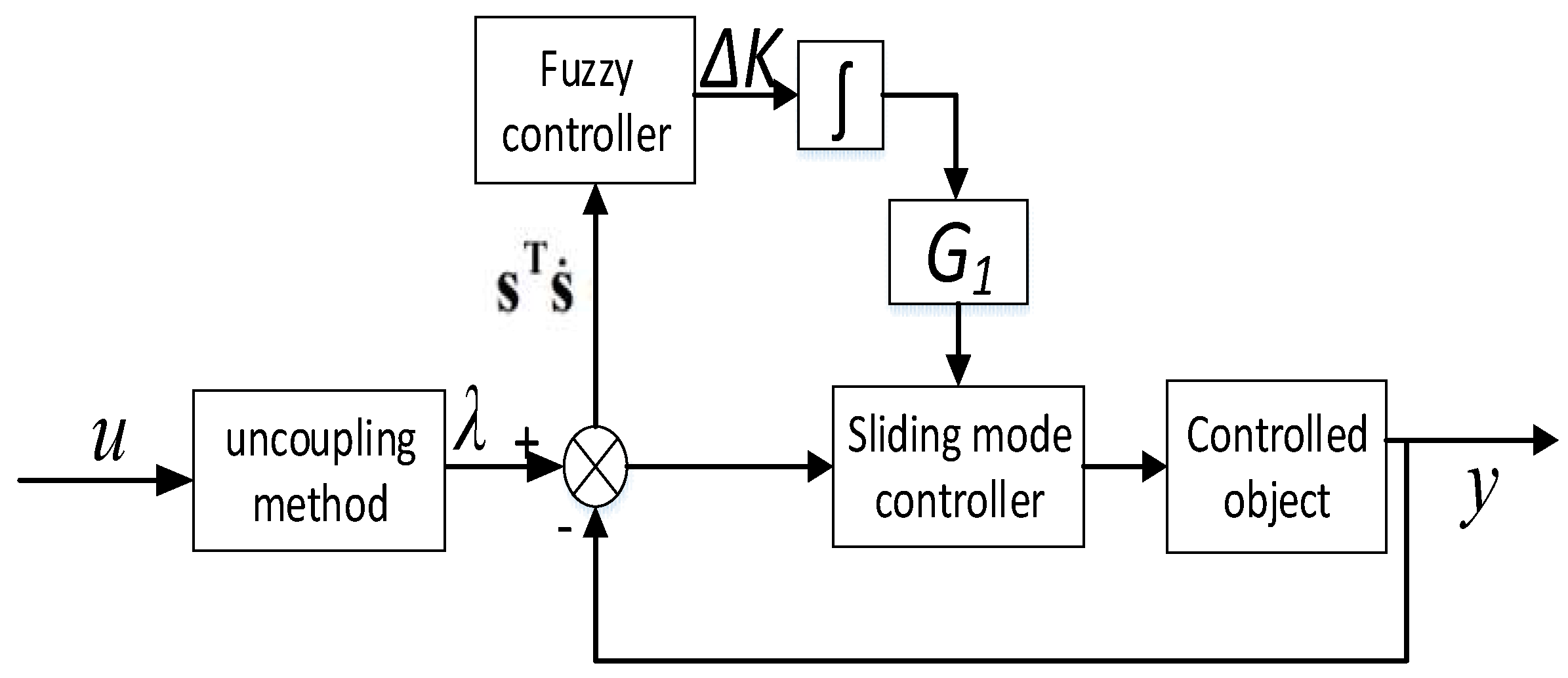
The structure of the controller [
16] is shown in
Figure 2.
4.1. Design of the Control Law
In order to design the control law for Formula (21), we took
as the reference instruction of
, and the error variables were as follows [
19]:
Next, we designed the sliding surface:
where
and
.
When , we could obtain and .
The equivalent switch control items could thus be obtained [
23]:
where
,
,
and
The switching control item was then designed:
where
is unknown interference. Both
and
will be described in more detail in
Section 4.2. The control law could be designed as follows:
4.2. Stability Analysis of the Control System
Taking Formulas (23)–(25) into
, the following could be obtained:
We took , where , , , , and .
We took the Lyapunov function as
, so:
where the gain of the switching
was the cause of chattering, and the control disturbance can be expressed as
, which was used for ensuring that the necessary sliding mode presence conditions were met. When
, we could obtain
. We took the following:
is the Hurwitz function, and represents the Eigenvalues of , .
Taking , the error equation of the state could be written as .
Taking
, we could get the Lyapunov equation
. The solution was
. We took the Lyapunov function as the following:
where
is the minimum eigenvalue of positive definite matrix,
.
From , we could obtain: , , , then , , and . From the stability of the sliding mode, we could obtain . In the end, , , and .
4.3. Establish the Fuzzy System
The condition for the existence of sliding mode was
, and when the system reached the sliding surface, it would remain on the sliding surface [
24]. From Formula (26), we could see that in order to ensure that the system movement reached the gain of the sliding surface,
needed to be sufficient to eliminate the impact of uncertainty. Then we could ensure the existence of the sliding condition.
The idea of the fuzzy rules was represented as follows:
If , then should increase;
if , then should be reduced.
From the two types above, we could design the fuzzy system using
and
. In this system,
is the input, and
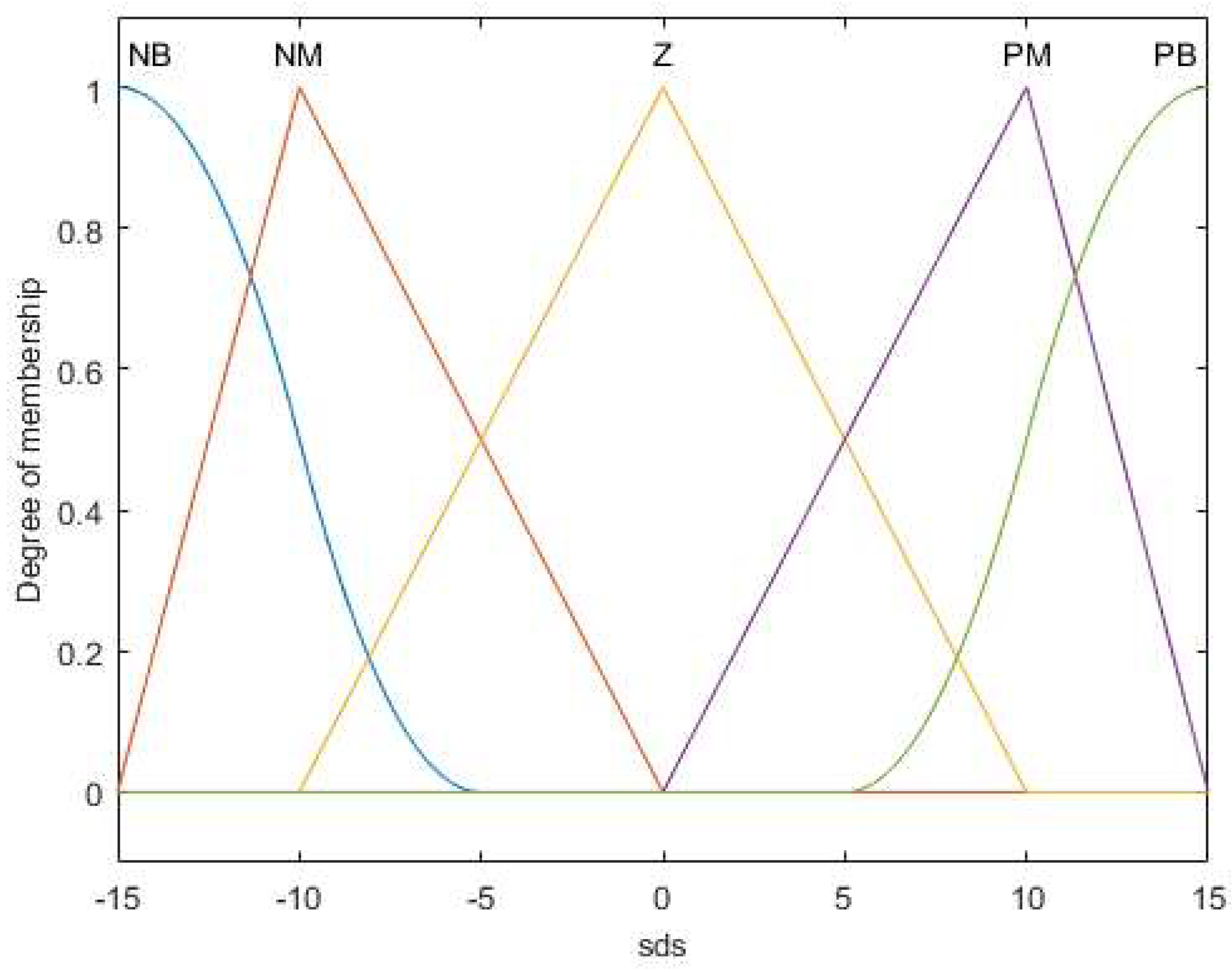
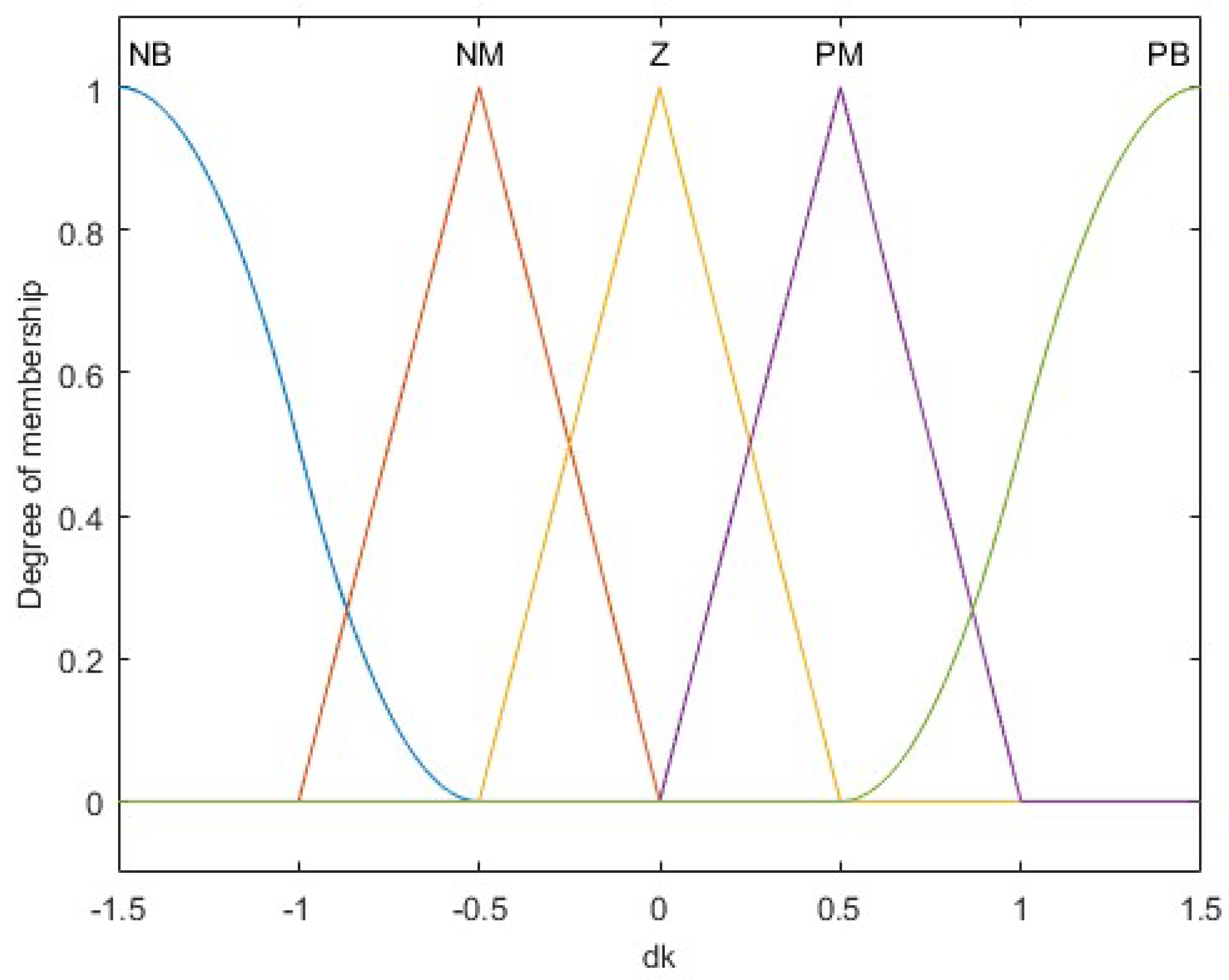
is the output. The fuzzy sets of the system were defined as follows:
where
represents the negative big,
is the negative middle,
is the zero,
is the positive middle, and
is the positive big. The input and output membership functions of the fuzzy system are shown in
Figure 3 and
Figure 4. The upper bound of
was estimated using the integral method:
where
is the proportion coefficient, determined according to experience. The control law was:
5. Simulation Analysis
The physical parameters of the system model were obtained through the three-dimensional model established in the CAD software Inventor, and the model reference coefficients were calculated in accordance to the physical parameters and the modeling results. The parameters are shown in
Table 1.
For the controlled Formula (13), we took and , and set a predetermined track as and .
In order to make A become the Hurwitz function, we took the control law parameters and . The initial state of the controlled system was taken as . We used the control law (Formula (25)) and saturation function method, and took the thickness of the boundary layer to be .
According to the structural characteristics of the coaxial-rotor UAV, a dynamic model of the longitudinal motion was established. The dynamic model of the aircraft was then decoupled, the fuzzy control and sliding mode controls were combined, and then a fuzzy sliding mode control based on the decoupling algorithm was designed for the coaxial-rotor. The control method was then simulated by MATLAB/Simulink. The results showed that the control method could track the command signal more quickly and efficiently compared to the method of the traditional sliding mode control. It could quickly reduce the yaw attitude angle deviation and the steady-state error could reach almost zero, and with a strong self-adaptive ability, it could achieve a better control effect. The response speed, tracking accuracy, and efficiency of the system were significantly improved.
The proposed control method could improve the stability of the system, which could effectively restrain the modeling errors and external disturbances of the aircraft’s attitude system. This method had the advantages of high control precision, strong robustness, and ease of implementation in engineering. In future studies, we will focus on the design of the decoupling algorithm under the influence of more inputs and interferences, and will apply this algorithm to specific engineering practices.
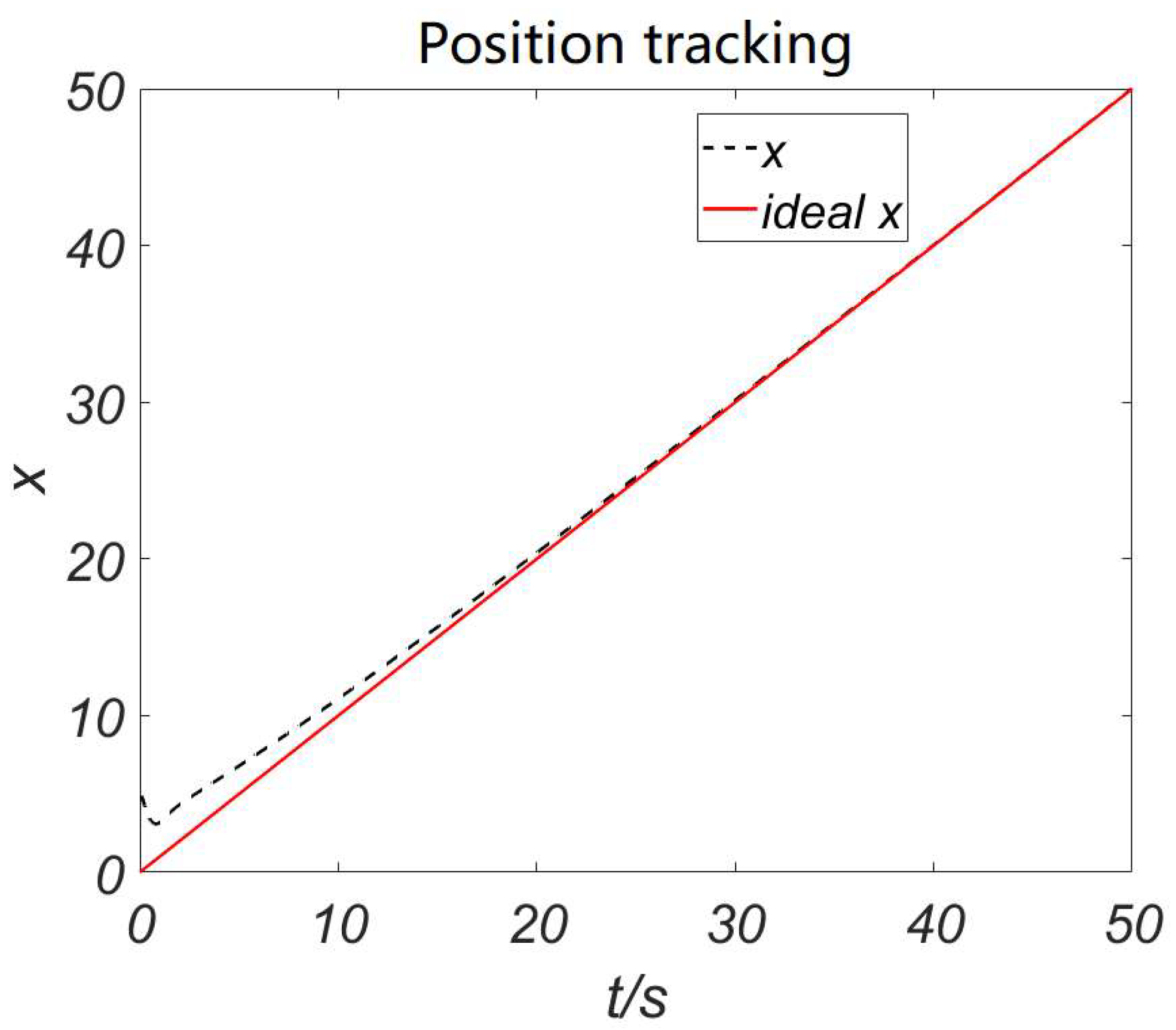
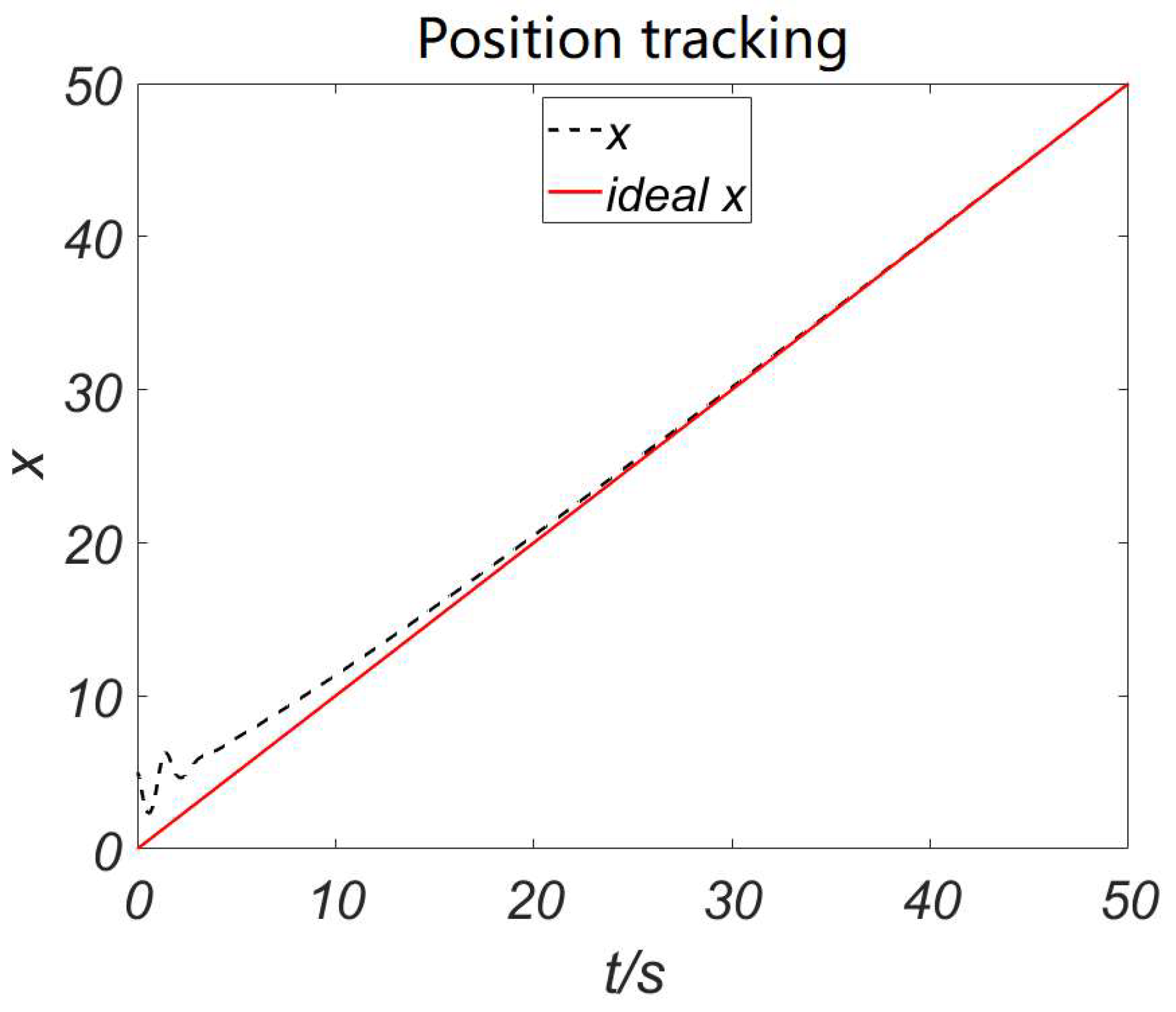
Figure 5 and
Figure 6 show the performance of position tracking in the horizontal direction while the two control methods were used. The instruction given along
x was a straight-line motion. The former figure indicates the position tracking with the decoupling algorithm and fuzzy control. The latter indicates the fuzzy control without the decoupling algorithm. From these figures, we could see that the performance of the control method with the decoupling algorithm and fuzzy control was faster, more accurate, and more stable than the general sliding mode control, ensuring that the aircraft would be more stable in actual movement and in improving the flight.
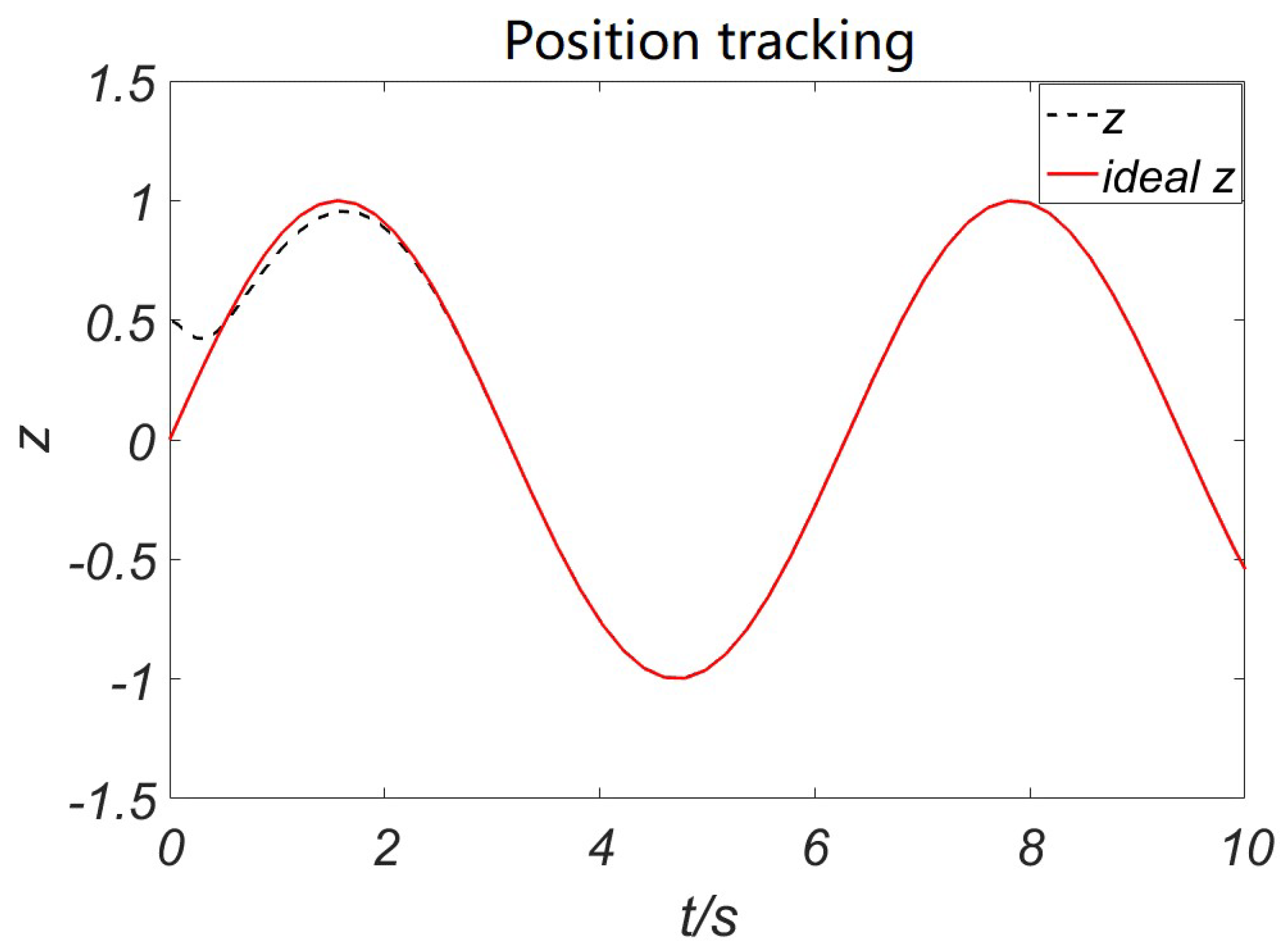
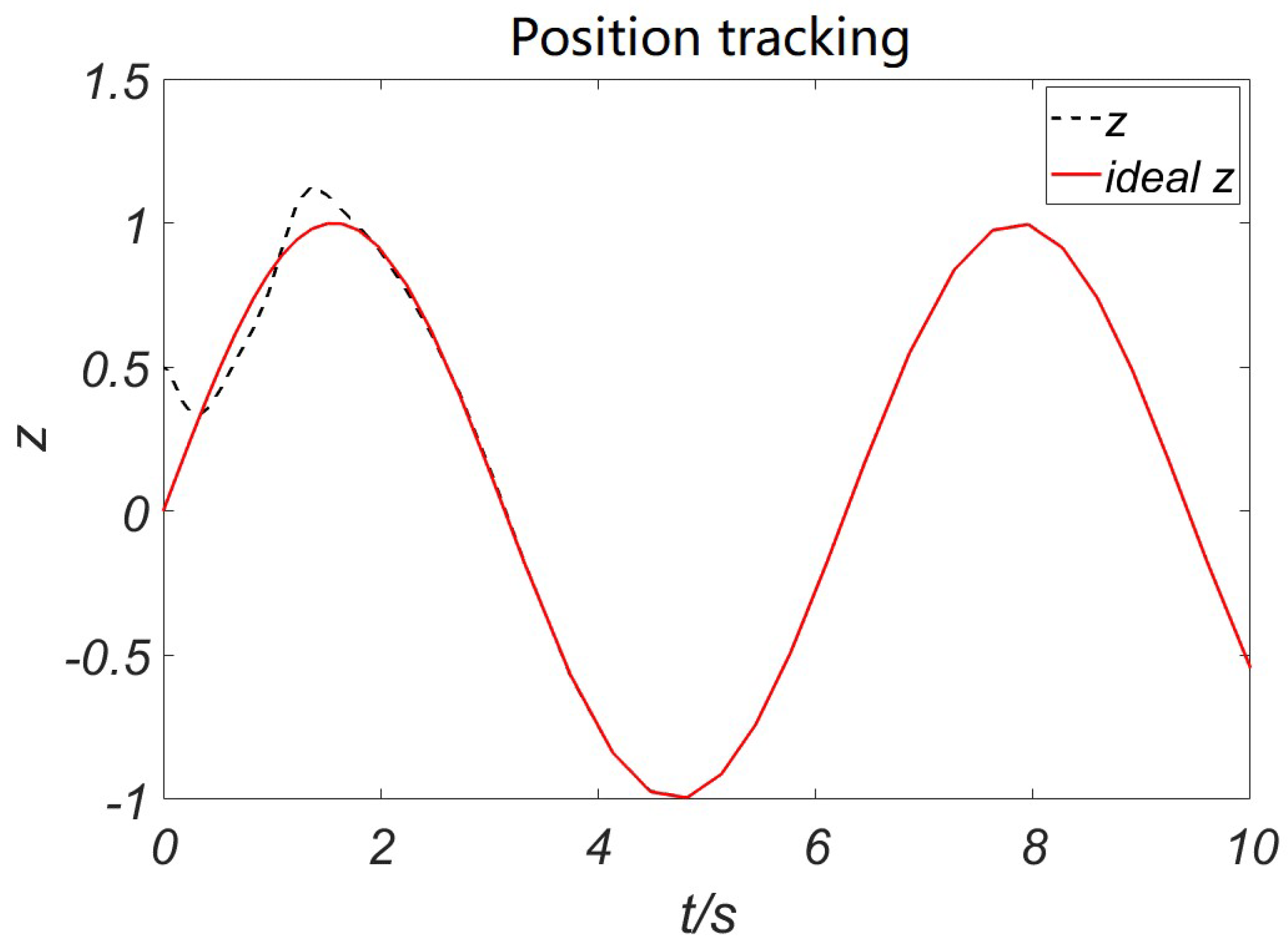
Figure 7 and
Figure 8 show the performance of the position tracking in the vertical direction while the two control methods were used. The instruction given along
z was a sinusoidal motion. The former figure indicates the position tracking with the decoupling algorithm and fuzzy control, and the latter indicates the general sliding mode control. From these figures we could see that the time required for the two methods to track from the initial position to the specified trajectory was almost the same, but the performance of the control method with the decoupling algorithm and fuzzy control was smoother, and the tracking error was also smaller. Thus, the flight of the aircraft would be more stable.
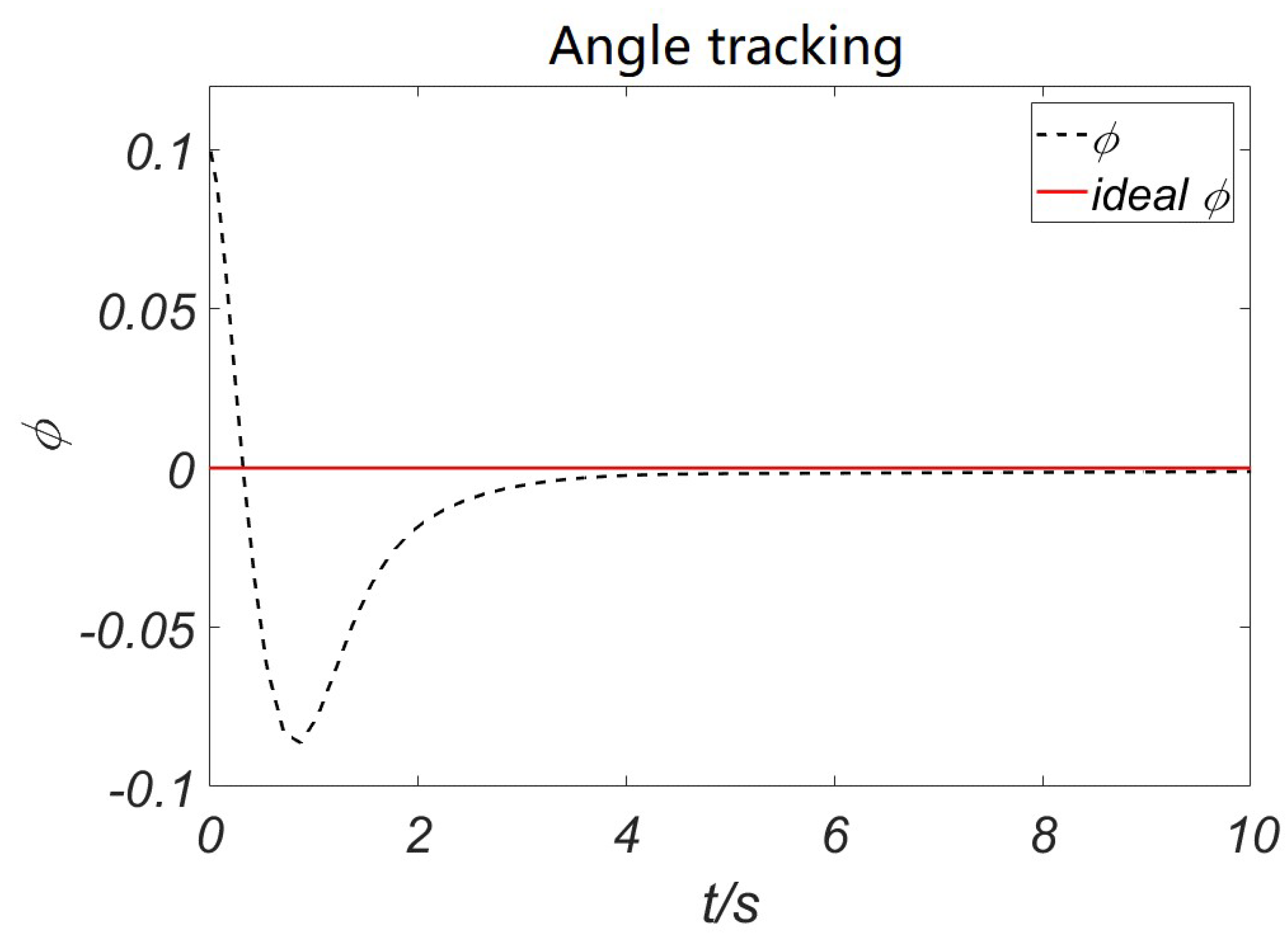
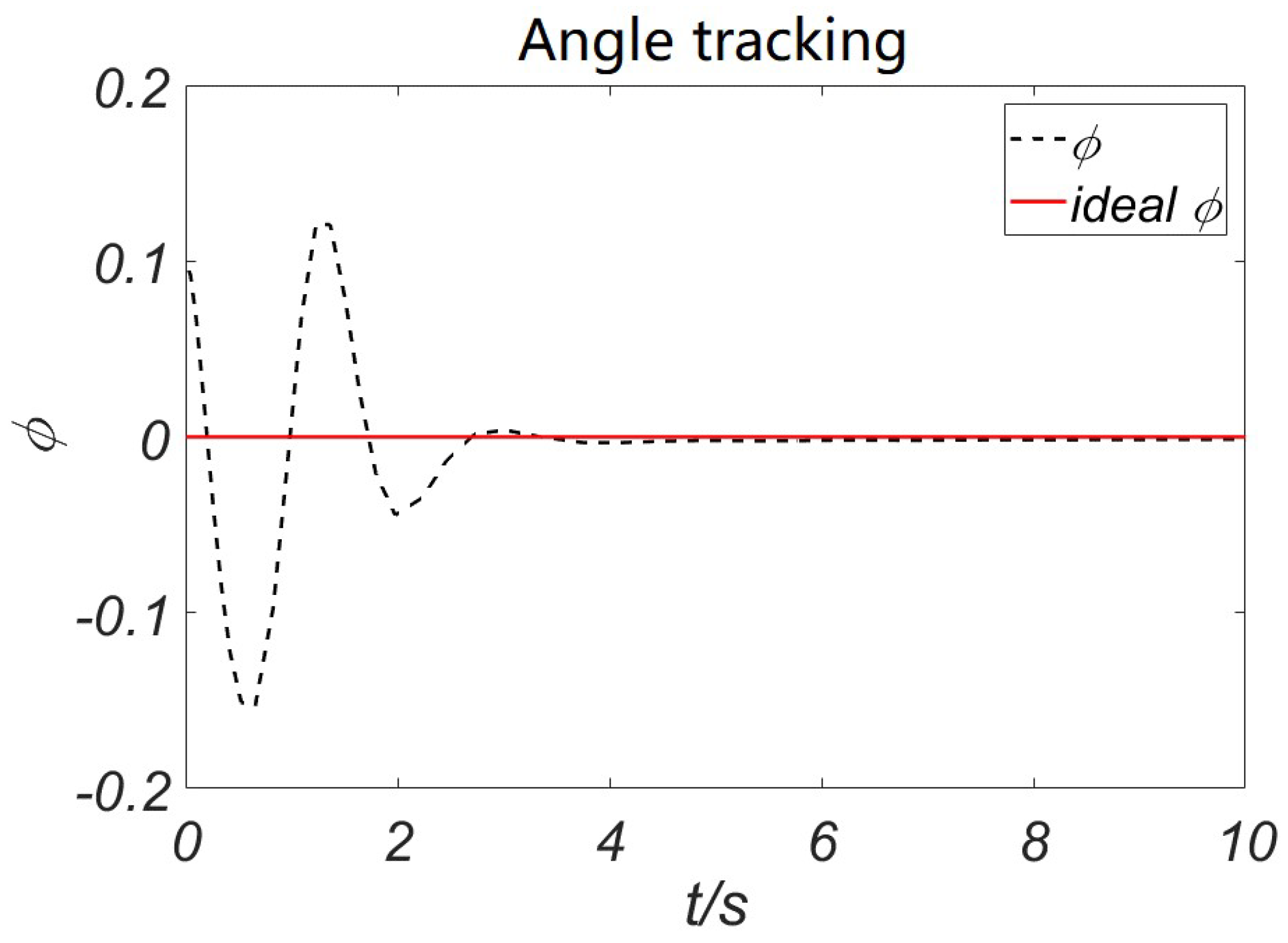
The angle tracking with the decoupling algorithm and fuzzy control are shown in
Figure 9, and when compared with the angle tracking (
Figure 10) without the decoupling algorithm and fuzzy control, it could be seen that in the former the tracking errors decreased while the response times were basically the same, and the movement accuracy and resistance to disturbances of the system improved. The system had better tracking performance. The impact of these disturbances, controller outputs chattering, external disturbances, and noise of the measurement were significantly reduced after the decoupling algorithm and fuzzy controller are added.
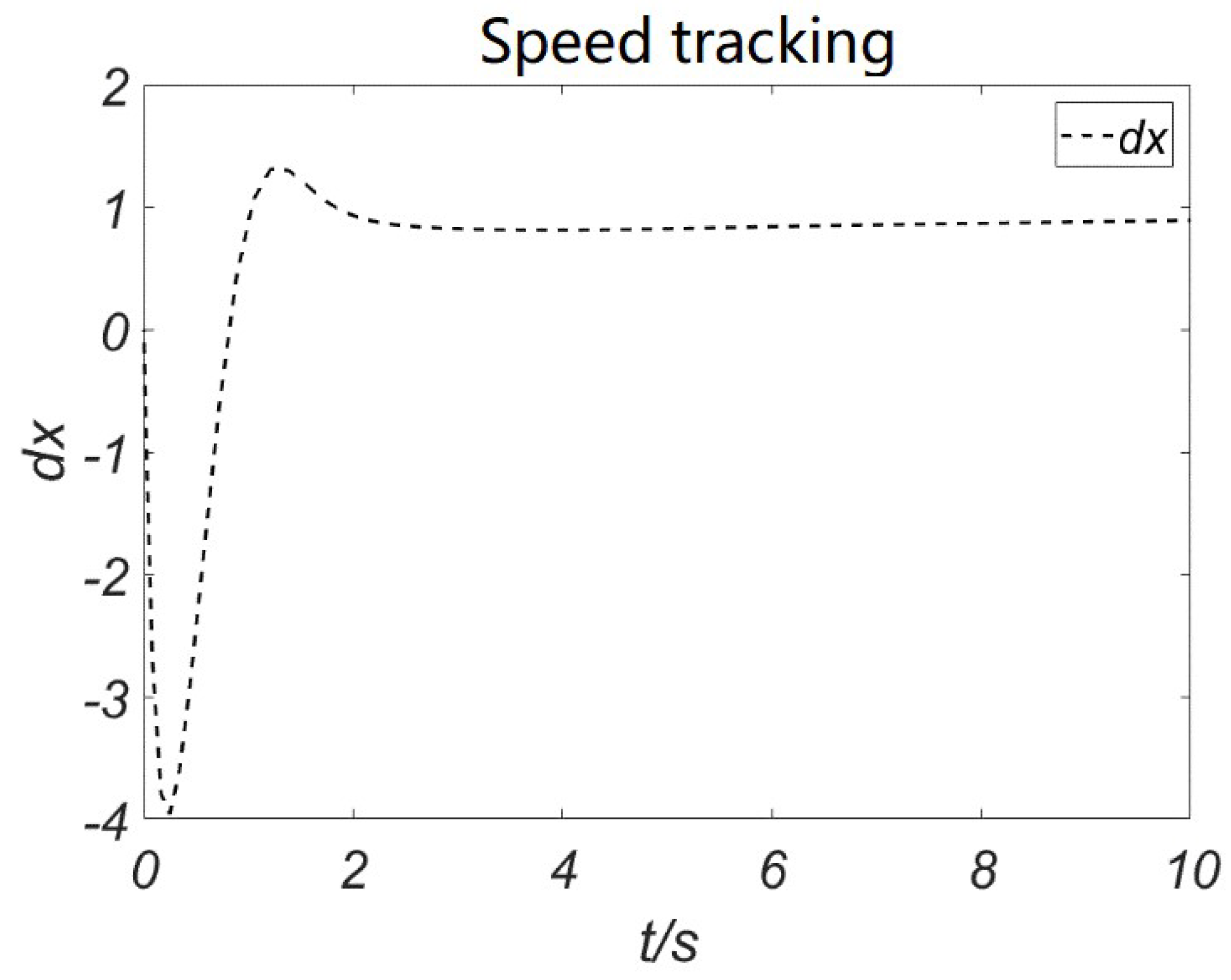
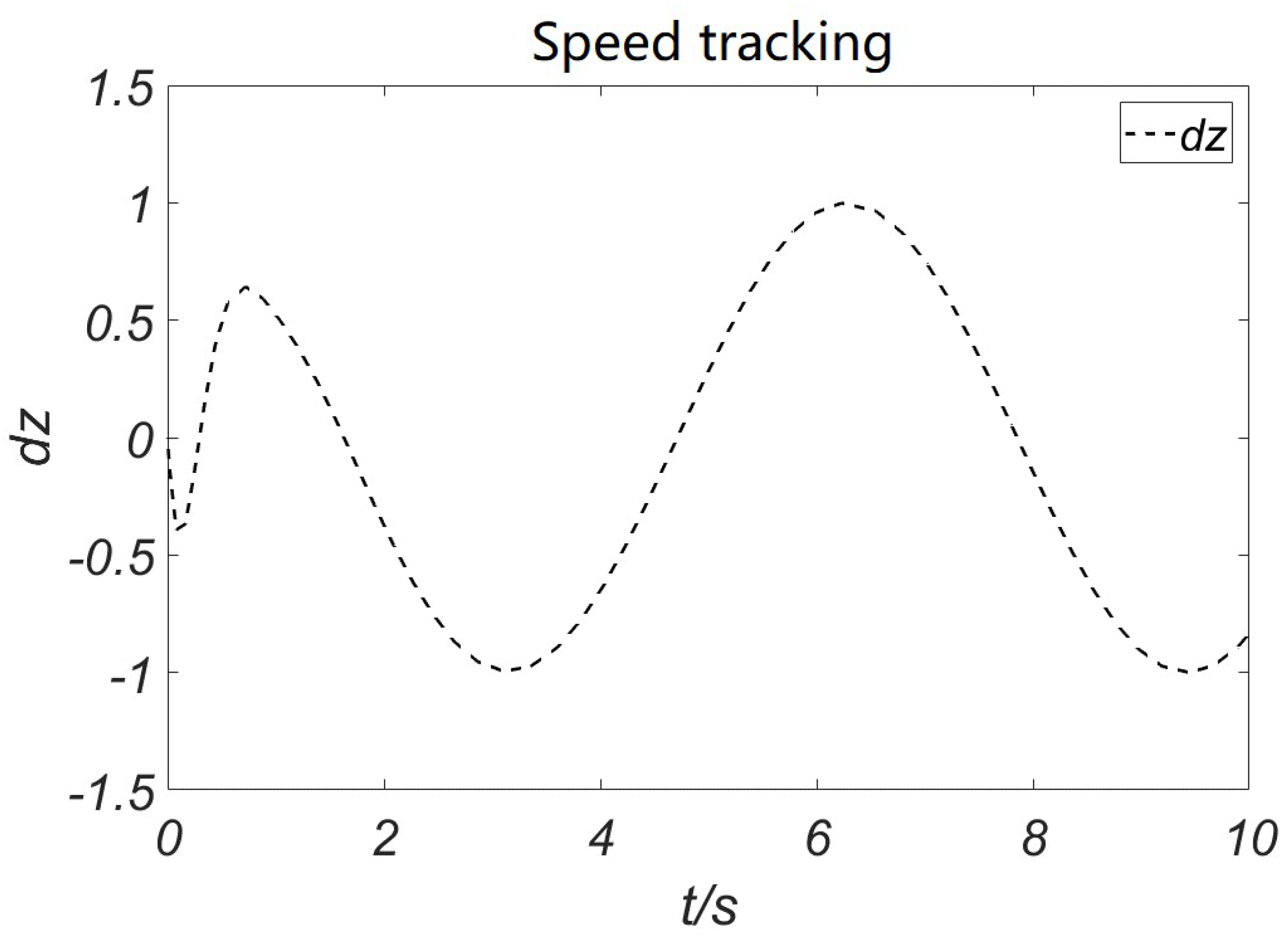
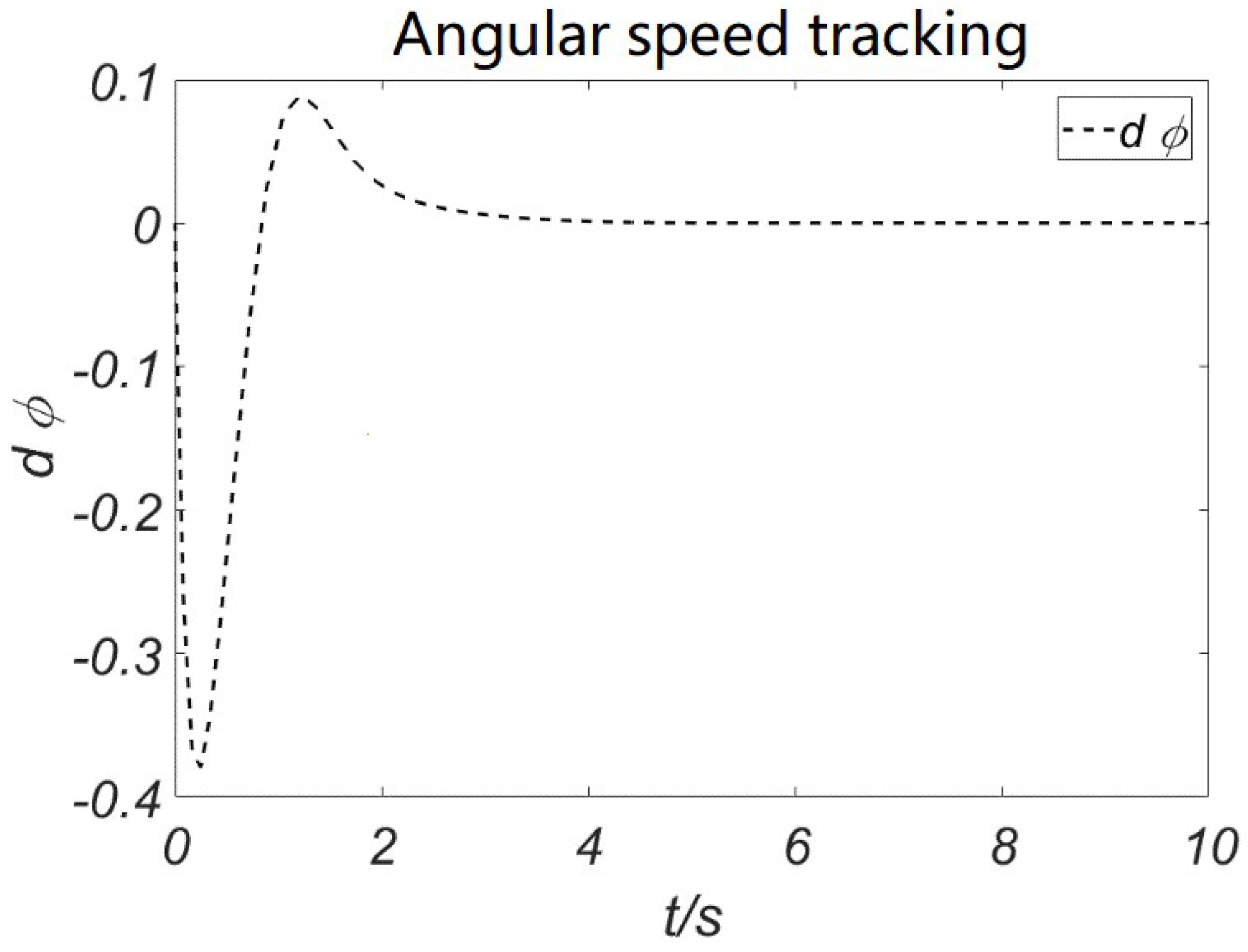
Figure 11,
Figure 12 and
Figure 13 show the speed tracking and angular speed tracking with the decoupling algorithm and fuzzy control. It could be seen that the change trajectory was smooth, and the time required to reach a stable state from the initial state was very short.
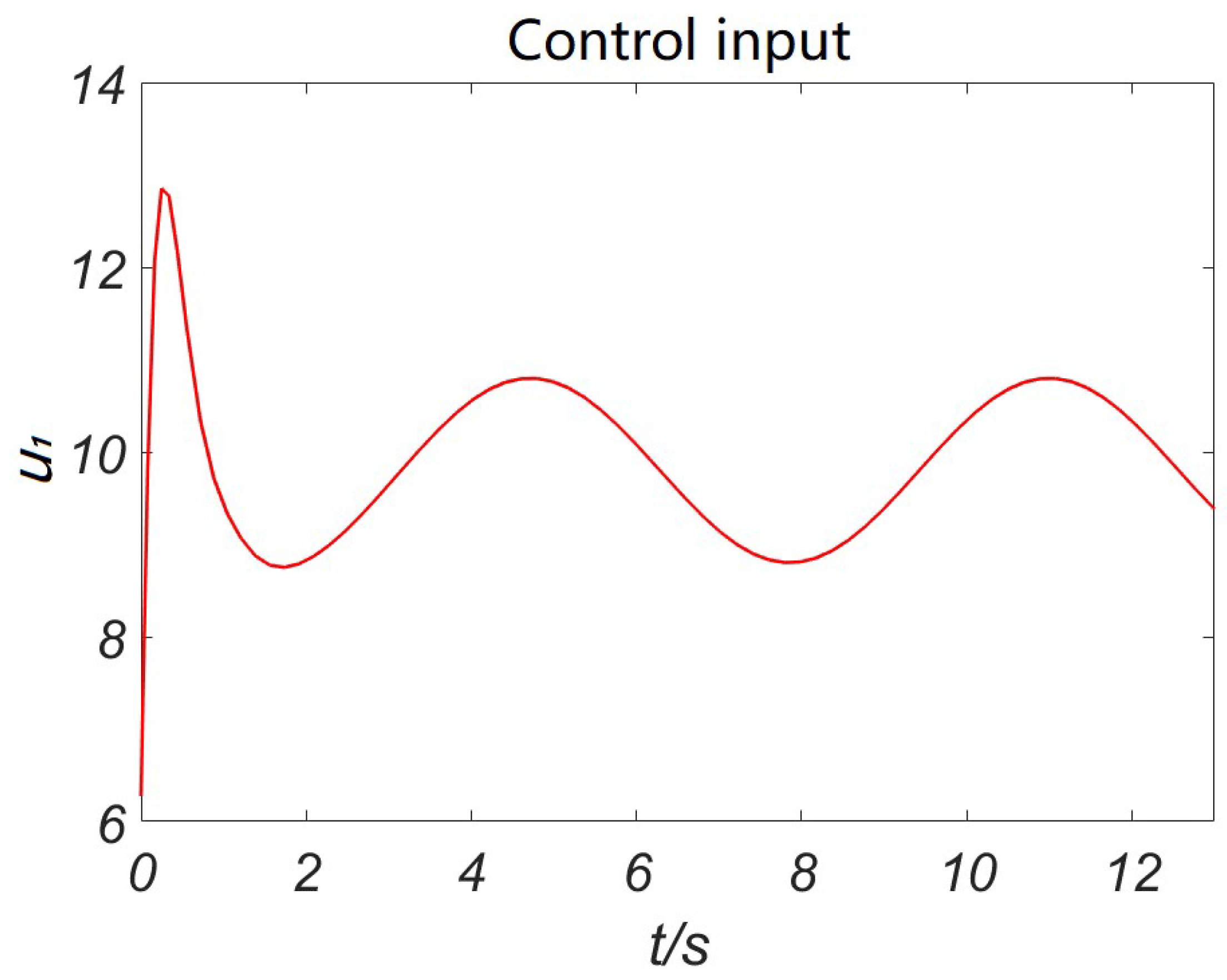
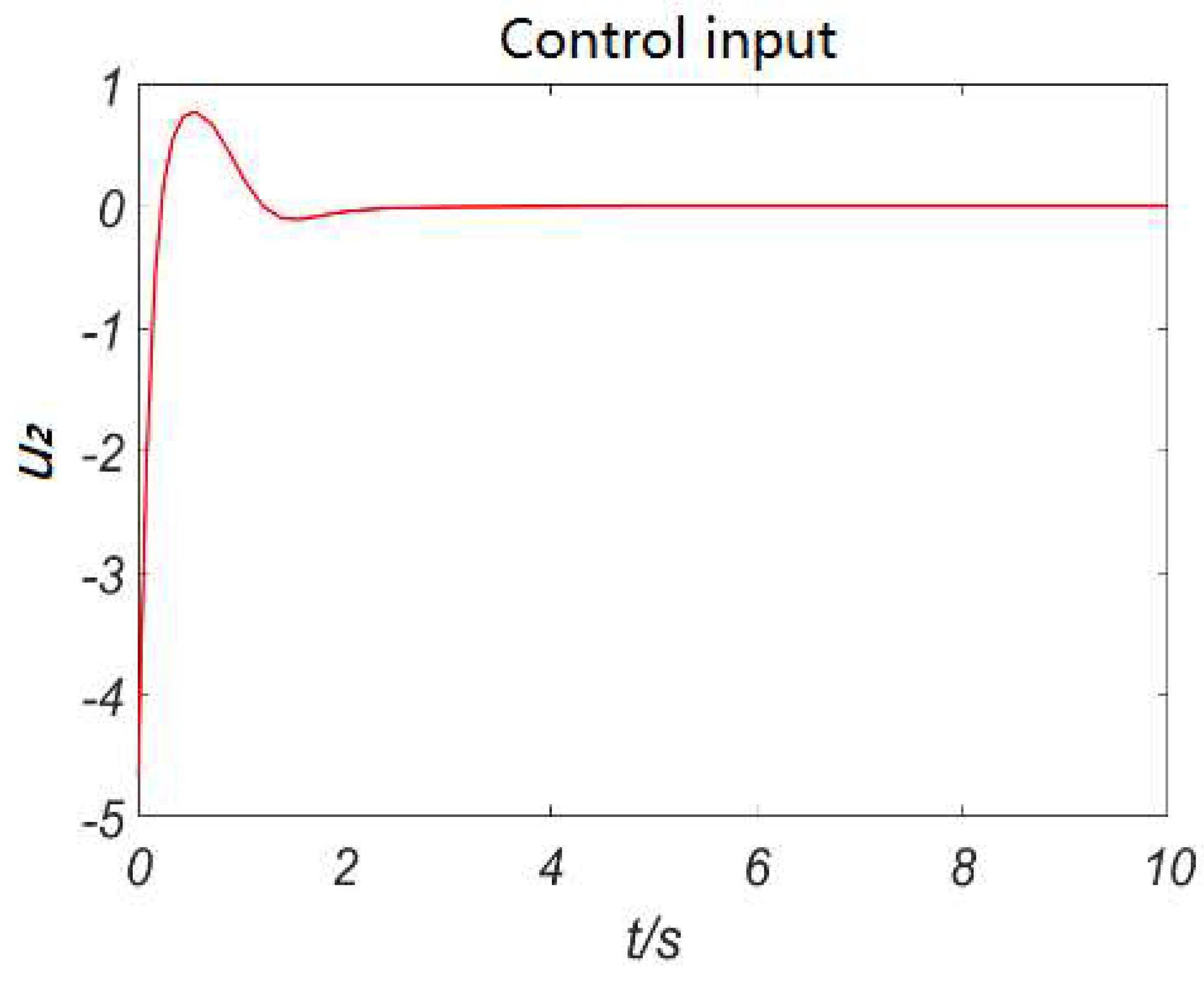
Figure 14 and
Figure 15 show the control input of the system. We could see that the control input curves were smooth and no chattering occurred. Theoretical analysis and experimental simulation results showed that the fuzzy sliding mode control based on the decoupling algorithm could improve the stability of the system, had a better self-adaptive ability, and effectively restrained the modeling errors and external disturbances of the co-rotating twin-rotor aircraft attitude system.
6. Conclusions
According to the structural characteristics of the coaxial-rotor UAV, a dynamic model of longitudinal motion was established. The dynamic model of the aircraft was then decoupled, the fuzzy control and sliding mode controls were combined, and a fuzzy sliding mode control based on the decoupling algorithm was designed for the coaxial-rotor. The control method was then simulated by MATLAB/Simulink. The results showed that the control method could track the command signal more quickly and efficiently compared to the method of the traditional sliding mode control. It could quickly reduce the yaw attitude angle deviation and the steady-state error could reach almost zero. With a strong self-adaptive ability, it could achieve a better control effect. The response speed, tracking accuracy, and efficiency of the system had been significantly improved.
The proposed control method could improve the stability of the system, which could effectively restrain the modeling errors and external disturbances of the aircraft’s attitude system. This method had the advantages of high control precision, strong robustness, and ease of implementation in engineering. In future studies, we will focus on the design of the decoupling algorithm under the influence of more inputs and interferences, and will apply this algorithm to specific engineering practices.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}