Power Amplifier Modeling Framework for Front-End-Aware Next-Generation Wireless Networks


Abstract
:1. Introduction
- A measuring system, which allows testing PAs with the use of a general-purpose IQ-based transmitter and receiver, e.g., SDR;
- A step-by-step measurement and signal processing solution is provided including cable attenuation compensation, time and frequency synchronization;
- Algorithms for PA characterization using a polynomial model or Rapp model are provided, although other PA models can be utilized as well;
- Simulation results confirming high estimation accuracy under varying PA parameters and time/frequency offset;
- Validation of the framework by measurements and the modeling of three amplifiers for with varying supply voltage and carrier frequency;
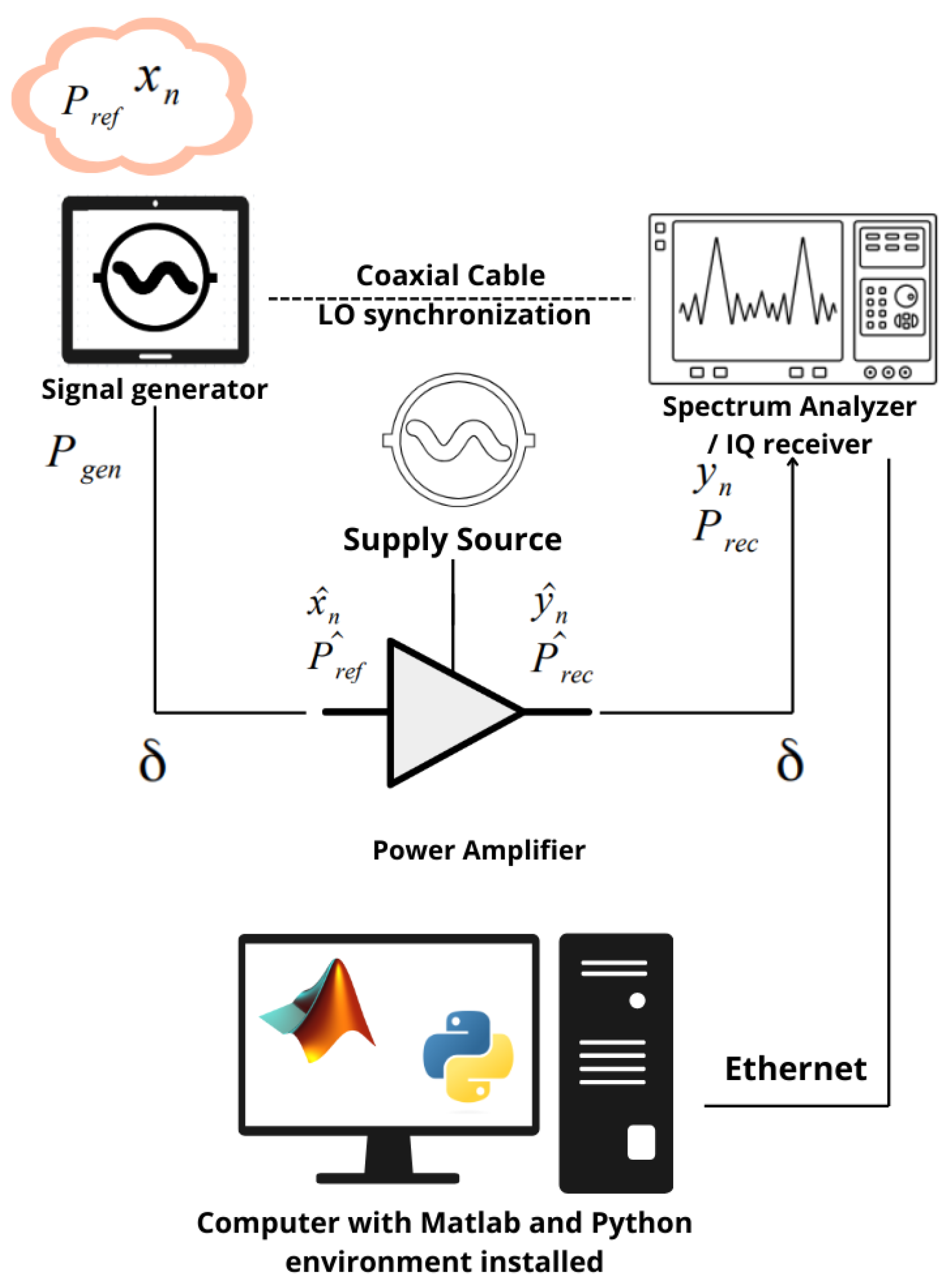
2. Measurement Framework
- The signal generator.
- The spectrum analyzer/IQ samples receiver.
- The power amplifier under test.
- The supply source.
- A computer with Matlab and Python environment installed, connected via an Ethernet cable.
2.1. Transmitter
2.2. Receiver
3. Signal Processing
3.1. Pre-Calibration
3.2. Correction
- Coarse frequency correction.
- Coarse time correction.
- Fine frequency correction.
- Fine time correction.
3.2.1. Coarse Frequency Correction
- In the frequency domain: shift the sample set of signal to the left by the found frequency offset .
- In the time domain: mix the received signal with a complex sinusoid of frequency .where represents the determined offset, n stands for the number of the currently considered sample in , and N is the total number of samples in .
3.2.2. Coarse Time Correction
3.2.3. Fine Frequency Correction
3.2.4. Fine Time Correction
3.3. PA Modeling
3.3.1. Polynomial Approximation
3.3.2. Rapp Model
| Algorithm 1 Rapp parameters estimation. |
|
3.3.3. Computational Complexity Comparison
4. Framework Evaluation Using Simulations and PA Measurements
4.1. Time and Frequency Correction
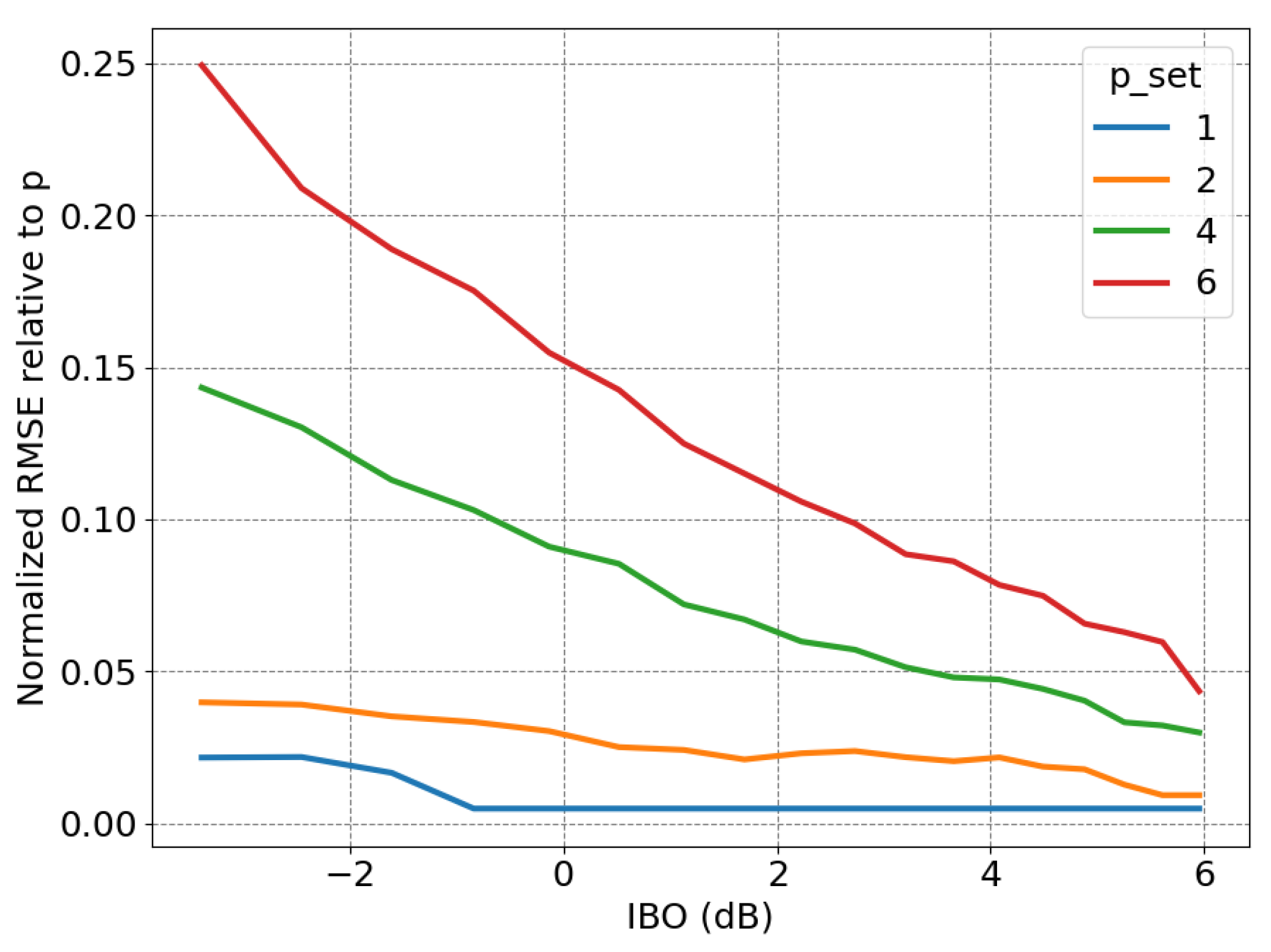
4.2. Accuracy of Rapp Model Parameter Estimation
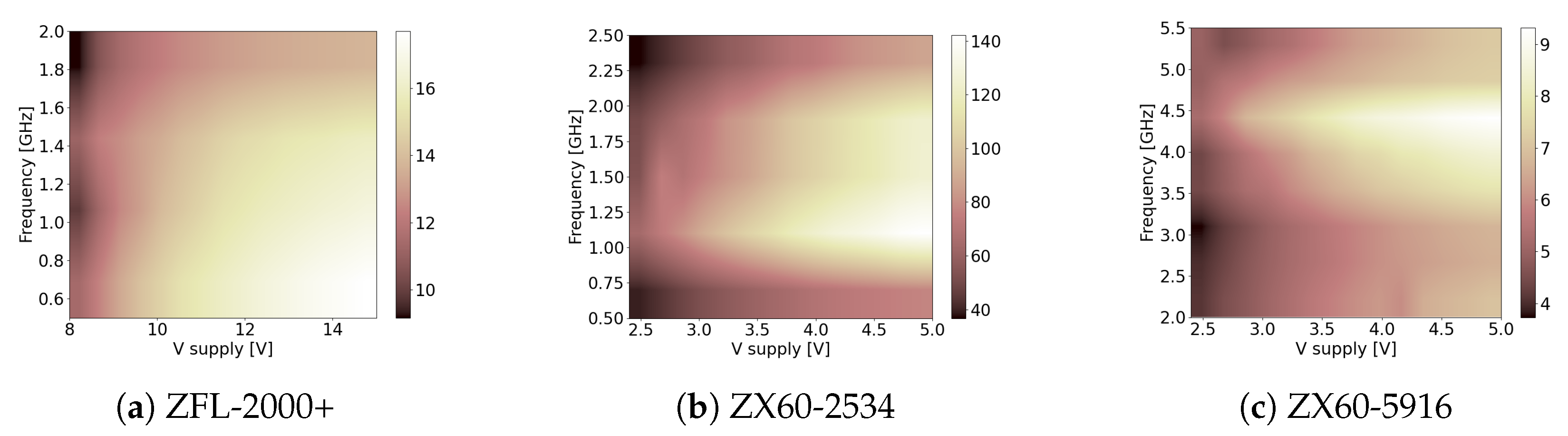
4.3. Measured PA Modeling
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| PA | power amplifier |
| VNA | vector network analyzer |
| SDR | software-defined radio |
| SA | spectrum analyzer |
| PAPR | peak-to-average power ratio |
| EE | energy efficiency |
| OFDM | orthogonal frequency division multiplexing |
| ET | envelope tracking |
| DPD | digital pre-distortion |
| WCDMA | wideband code division multiple access |
| RF | radio frequency |
| DUT | device under test |
| DC | direct current |
| DAC | digital-to-analog converter |
| ADC | analog-to-digital converter |
| DFT | discrete Fourier transform |
| IDFT | inverse discrete Fourier transform |
| AM/AM | amplitude modulation to amplitude modulation |
| AM/PM | amplitude modulation to phase modulation |
| IF | intermediate frequency |
| QoS | quality of service |
References
- Thota, S.; Kamatham, Y.; Paidimarry, C.S. Analysis of hybrid PAPR reduction methods of OFDM signal for HPA models in wireless communications. IEEE Access 2020, 8, 22780–22791. [Google Scholar] [CrossRef]
- Wang, C.X.; You, X.; Gao, X.; Zhu, X.; Li, Z.; Zhang, C.; Wang, H.; Huang, Y.; Chen, Y.; Haas, H.; et al. On the road to 6G: Visions, requirements, key technologies and testbeds. IEEE Commun. Surv. Tutor. 2023, 25, 905–974. [Google Scholar] [CrossRef]
- Bossy, B.; Kryszkiewicz, P.; Bogucka, H. Energy-Efficient OFDM Radio Resource Allocation Optimization With Computational Awareness: A Survey. IEEE Access 2022, 10, 94100–94132. [Google Scholar] [CrossRef]
- Joung, J.; Ho, C.K.; Adachi, K.; Sun, S. A survey on power-amplifier-centric techniques for spectrum-and energy-efficient wireless communications. IEEE Commun. Surv. Tutor. 2014, 17, 315–333. [Google Scholar] [CrossRef]
- Tafuri, F.F.; Sira, D.; Nielsen, T.S.; Jensen, O.K.; Mikkelsen, J.H.; Larsen, T. Memory models for behavioral modeling and digital predistortion of envelope tracking power amplifiers. Microprocess. Microsyst. 2015, 39, 879–888. [Google Scholar] [CrossRef]
- Hoffmann, M.; Kryszkiewicz, P. Contextual Bandit-Based Amplifier IBO Optimization in Massive MIMO Network. IEEE Access 2023, 11, 127035–127042. [Google Scholar] [CrossRef]
- Ghannouchi, F.M.; Hammi, O. Behavioral modeling and predistortion. IEEE Microw. Mag. 2009, 10, 52–64. [Google Scholar] [CrossRef]
- Wisell, D. Measurement Techniques for Characterization of Power Amplifiers. Ph.D. Thesis, KTH, Stockholm, Sweden, 2007. [Google Scholar]
- Clark, C.J.; Silva, C.P.; Moulthrop, A.A.; Muha, M.S. Power-amplifier characterization using a two-tone measurement technique. IEEE Trans. Microw. Theory Tech. 2002, 50, 1590–1602. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, X.; He, Z.; Huang, H.; Huang, J.; Nie, M.; Wang, L.; Yang, A.; Lu, Z. Characterization for multiharmonic intermodulation nonlinearity of RF power amplifiers using a calibrated nonlinear vector network analyzer. IEEE Trans. Microw. Theory Tech. 2016, 64, 2912–2923. [Google Scholar] [CrossRef]
- Jeckeln, E.; Ghannouchi, F.; Sawan, M. A new adaptive predistortion technique using software-defined radio and DSP technologies suitable for base station 3G power amplifiers. IEEE Trans. Microw. Theory Tech. 2004, 52, 2139–2147. [Google Scholar] [CrossRef]
- Boumaiza, S.; Helaoui, M.; Hammi, O.; Liu, T.; Ghannouchi, F.M. Systematic and adaptive characterization approach for behavior modeling and correction of dynamic nonlinear transmitters. IEEE Trans. Instrum. Meas. 2007, 56, 2203–2211. [Google Scholar] [CrossRef]
- Kryszkiewicz, P.; Kostrzewska, K. Measurements of Nonlinearity Characteristics and Power Consumption of 3 Power Amplifiers (ZFL-2000+, ZX60-2534, ZX60-5916); CERN: Geneve, Switzerland, 2024. [Google Scholar] [CrossRef]
- Kryszkiewicz, P.; Kliks, A.; Bogucka, H. Obtaining low out-of-band emission level of an NC-OFDM waveform in the SDR platform. In Proceedings of the 2015 International Symposium on Wireless Communication Systems (ISWCS), Brussels, Belgium, 25–28 August 2015; pp. 66–70. [Google Scholar]
- Kryszkiewicz, P. Amplifier-coupled tone reservation for minimization of OFDM nonlinear distortion. IEEE Trans. Veh. Technol. 2018, 67, 4316–4324. [Google Scholar] [CrossRef]
- Rohde & Schawarz. FSL6 Manual. Available online: https://scdn.rohde-schwarz.com/ur/pws/dl_downloads/dl_common_library/dl_manuals/gb_1/f/sfl_1/FSL_OperatingManual_en_12.pdf (accessed on 22 April 2024).
- Newton, T. Channel Sounding in White Space Spectrum; Technical Report 1MA199; Rohde&Schwarz/Neul: Columbia, MD, USA, 2011. [Google Scholar]
- Georgiev, S.G.; Erhan, İ.M. LAGRANGE INTERPOLATION ON TIME SCALES. J. Appl. Anal. Comput. 2022, 12, 1294–1307. [Google Scholar] [CrossRef]
- Gharaibeh, K.M. Nonlinear Distortion in Wireless Systems: Modeling and Simulation with MATLAB; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar] [CrossRef]
- Nokia. Realistic Power Amplifier Model for the New Radio Evaluation; 3GPP doc. R4-163314; 3GPP: Sophia Antipolis, France, 2016. [Google Scholar]
- Glock, S.; Rascher, J.; Sogl, B.; Ussmueller, T.; Mueller, J.E.; Weigel, R. A Memoryless Semi-Physical Power Amplifier Behavioral Model Based on the Correlation Between AM–AM and AM–PM Distortions. IEEE Trans. Microw. Theory Tech. 2015, 63, 1826–1835. [Google Scholar] [CrossRef]
- Al-kanan, H.; Tafuri, F.; Li, F. Hysteresis nonlinearity modeling and linearization approach for Envelope Tracking Power Amplifiers in wireless systems. Microelectron. J. 2018, 82, 101–107. [Google Scholar] [CrossRef]
- Li, D.; Yu, H. A new model for envelope tracking power amplifier modeling and digital predistortion. In Proceedings of the 2016 8th International Conference on Wireless Communications & Signal Processing (WCSP), Yangzhou, China, 13–15 October 2016; pp. 1–5. [Google Scholar]
- Mengozzi, M.; Angelotti, A.M.; Gibiino, G.P.; Florian, C.; Santarelli, A. Joint dual-input digital predistortion of supply-modulated RF PA by surrogate-based multi-objective optimization. IEEE Trans. Microw. Theory Tech. 2021, 70, 35–49. [Google Scholar] [CrossRef]
- Press, W.H. Numerical Recipes, 3rd ed.; The Art of Scientific Computing; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Golub, G.H.; Van Loan, C.F. Matrix Computations; JHU Press: Baltimore, MD, USA, 2013. [Google Scholar]
- Strang, G. Introduction to Linear Algebra; SIAM: Philadelphia, PA, USA, 2022. [Google Scholar]
- MATLAB, M. Compute Square Root Using CORDIC. Available online: https://www.mathworks.com/help/fixedpoint/ug/compute-square-root-using-cordic.html (accessed on 22 April 2024).
- Mini-Circuits. ZFL-2000+. Available online: https://www.minicircuits.com/pdfs/ZFL-2000+.pdf (accessed on 22 April 2024).
- Mini-Circuits. ZX60-5916. Available online: https://www.minicircuits.com/pdfs/ZX60-5916MA+.pdf (accessed on 22 April 2024).
- Mini-Circuits. ZX60-2534. Available online: https://www.minicircuits.com/pdfs/ZX60-2534MA+.pdf (accessed on 22 April 2024).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PA Model | Voltage Range | Tested Voltages |
|---|---|---|
| ZFL-2000+ | max 17 V | 8.0, 9.5, …, 14.5, 15.0 V |
| ZX60-5916 | 2.8–5.0 V | 2.4, 2.6, …, 4.8, 5.0 V |
| ZX60-2534 | 2.8–5.0 V | 2.4, 2.6, …, 4.8, 5.0 V |
| PA Model | Frequency Range | Tested Frequencies |
|---|---|---|
| ZFL-2000+ | 10–2000 MHz | 0.5, 1, …, 2 GHz |
| ZX60-5916 | 1500–6000 MHz | 2, 2.5, …, 5.5 GHz |
| ZX60-2534 | 500–2500 MHz | 0.5, 1, …, 2.5 GHz |
| PA Model | Mean Power Pgen [dBm] | Max Input Power [dBm] |
|---|---|---|
| ZFL-2000+ | −6 | 5 |
| ZX60-5916 | 0 | 10 |
| ZX60-2534 | −26 | −15 |
| Frequency Offsets [Subcarrier Spacing] | ||
| Set Offset | Result | Absolute Error |
| 3.4 | 3.396 | 0.004 |
| 9.5 | 9.491 | 0.009 |
| 1.2 | 1.198 | 0.002 |
| 6.3 | 6.293 | 0.007 |
| 2.9 | 2.896 | 0.004 |
| 4.4 | 4.395 | 0.005 |
| 6.4 | 6.393 | 0.007 |
| 5.1 | 5.094 | 0.006 |
| 4.4 | 4.395 | 0.005 |
| 5.1 | 5.094 | 0.006 |
| Time offsets [sample period] | ||
| Set offset | Result | Absolute Error |
| 2.3 | 2.297 | 0.003 |
| 6.3 | 6.297 | 0.003 |
| 8.8 | 8.803 | 0.003 |
| 8.0 | 8.000 | 0.000 |
| 4.5 | 6.499 | 0.001 |
| 2.6 | 2.601 | 0.001 |
| 6.5 | 6.500 | 0.000 |
| 4.9 | 4.902 | 0.002 |
| 2.8 | 2.803 | 0.003 |
| 4.8 | 4.803 | 0.003 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kostrzewska, K.; Kryszkiewicz, P. Power Amplifier Modeling Framework for Front-End-Aware Next-Generation Wireless Networks. Electronics 2024, 13, 1643. https://doi.org/10.3390/electronics13091643
Kostrzewska K, Kryszkiewicz P. Power Amplifier Modeling Framework for Front-End-Aware Next-Generation Wireless Networks. Electronics. 2024; 13(9):1643. https://doi.org/10.3390/electronics13091643
Chicago/Turabian StyleKostrzewska, Kornelia, and Pawel Kryszkiewicz. 2024. "Power Amplifier Modeling Framework for Front-End-Aware Next-Generation Wireless Networks" Electronics 13, no. 9: 1643. https://doi.org/10.3390/electronics13091643