
A Fusion Adaptive Cubature Kalman Filter Approach for False Data Injection Attack Detection of DC Microgrids

Abstract
:1. Introduction
2. DC MG Model
2.1. DC MG Structure
2.2. DC MG Model
2.3. DC MG Model with FDIA
3. FDIA Detection Based on an FACKF
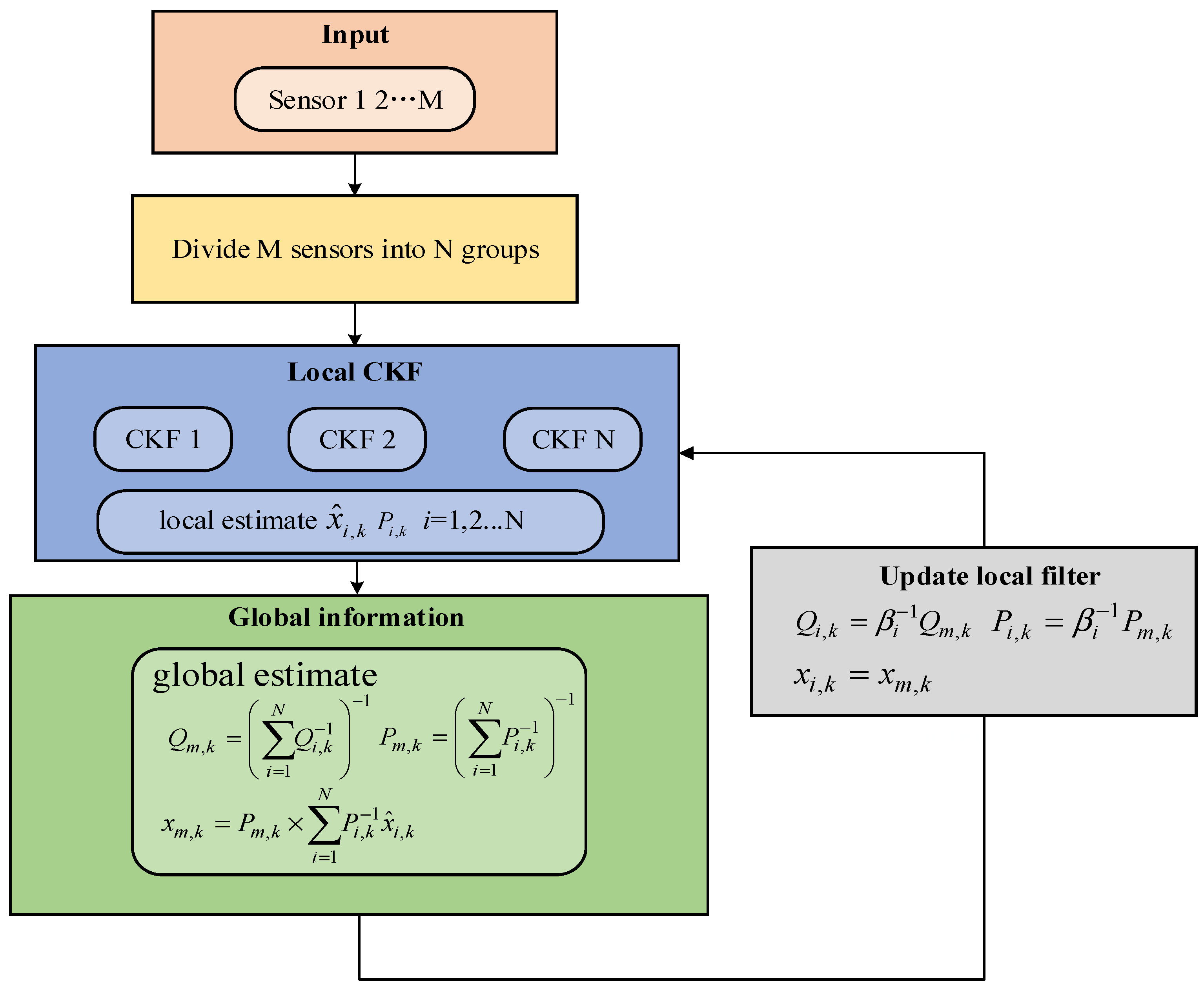
3.1. Fusion Adaptive CKF Approach
3.2. False Data Injection Attack Detection Based on FACKF
| Algorithm 1: Fusion Adaptive Cubature Kalman Filter |
| 1: Generate local measurements. |
| 2: Initialize the parameters , of each local. |
| 3: Calculate cubature points: |
| 4: Perform time and measurement updates for each local CKF:
|
| 5: Calculate global estimation:
|
| 6: Calculate state variance and residual of locals:
|
| 7: Compare state variance with threshold. If it is larger than the threshold, go to 9 and alarm a faulty situation. Otherwise, go to 11. |
| 8: Evaluate the residual value and determine the faulty sensor based on correct locals. |
| 9: Eliminate faulty locals and calculate the global estimates based on healthy locals. |
| 10: Assign global estimates to locals, update them, and come back to 3.
|
4. Simulation Results
4.1. Test Systems
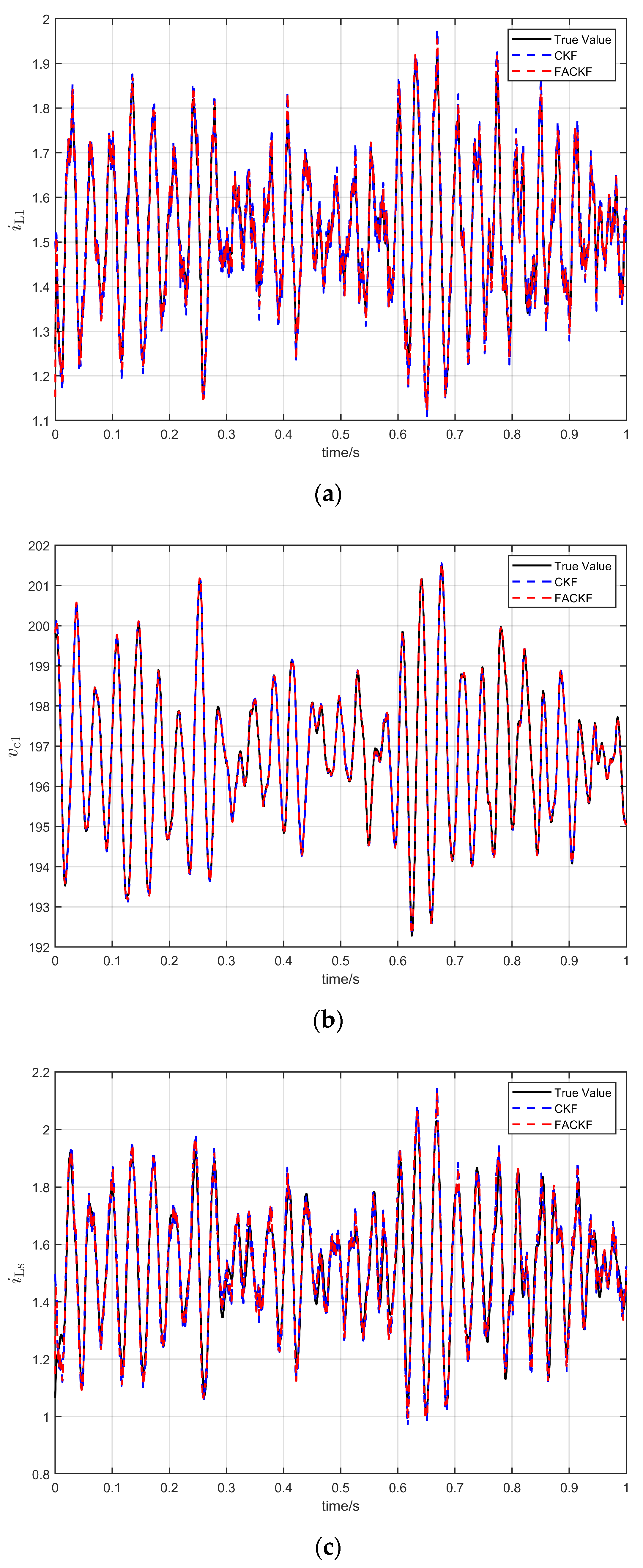
4.2. Case 1: Comparison of Estimation Accuracy
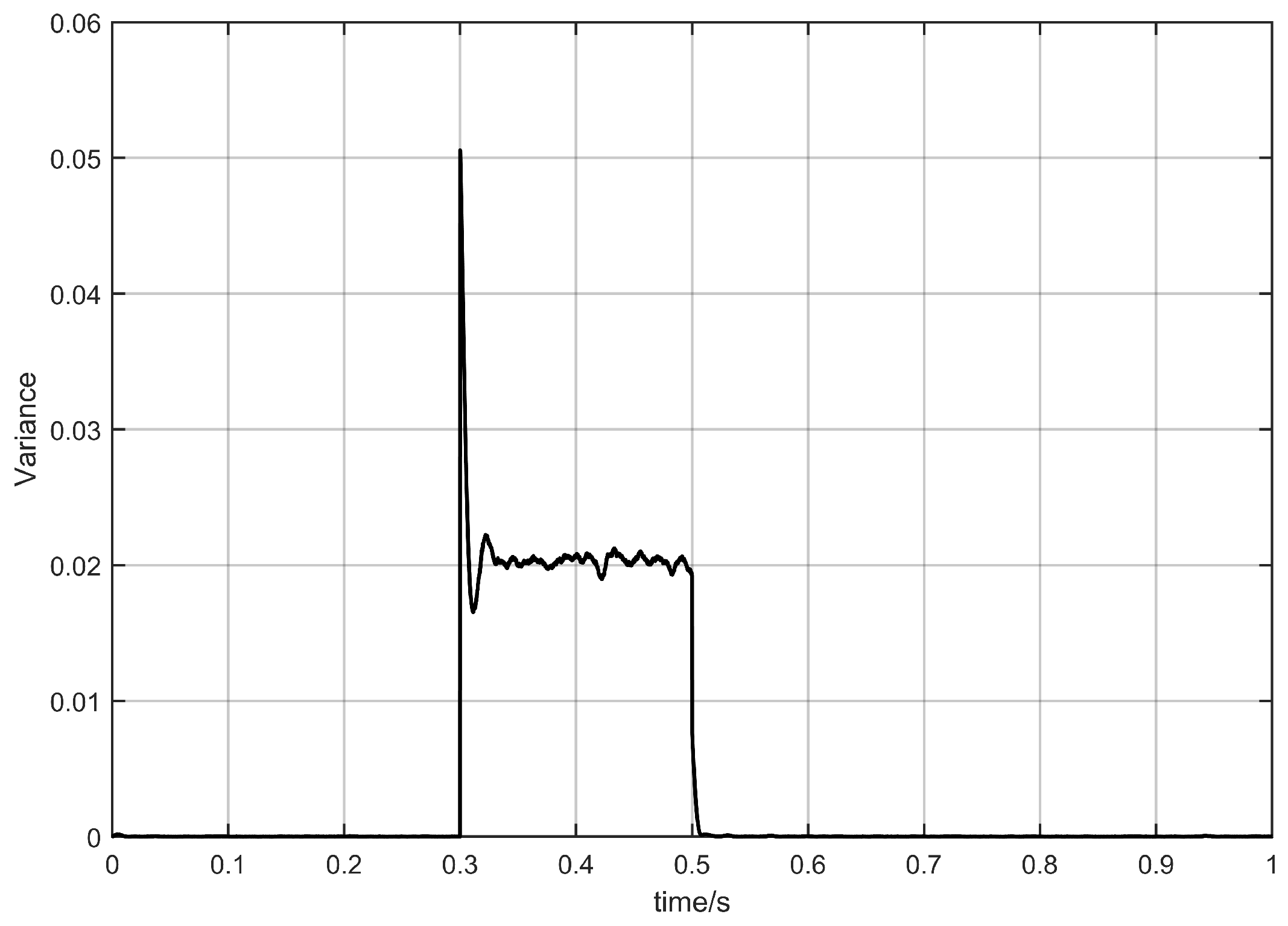
4.3. Case 2: Single CPL DC MG System
4.4. Case 3: Effectiveness of the FACKF under Multiple CPLs
4.5. Case 4: Computational Efficiency Test
5. Conclusions
- (1)
- The FACKF method proposed in this study can effectively detect false data injection attacks and accurately identify the attacked injection units, enhancing the system’s protection against malicious attacks.
- (2)
- After applying this research method, once an attack is identified, isolating the attacked unit and replacing the overall estimate with the correct local estimate can significantly enhance the robustness of the estimation process, thereby improving the stability and reliability of the system.
- (3)
- The method proposed in this study exhibits low computational complexity. It not only effectively detects and locates attacks but also accurately estimates the system state under attack conditions, further ensuring the safe operation of the DC microgrid.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ansari, S.; Zhang, J.; Singh, R.E. A review of stabilization methods for DCMG with CPL, the role of bandwidth limits and droop control. Prot. Control Mod. Power Syst. 2022, 7, 12–19. [Google Scholar] [CrossRef]
- Liu, B.; Li, H.; Zhang, H.; Han, M. A reactive power injection algorithm for improving the microgrid operational reliability. Electronics 2023, 12, 2932. [Google Scholar] [CrossRef]
- Jiang, X.; Liu, W.; Yan, G.; Shao, H.; Zhang, L.; Wen, Y. Research on load carrying capacity evaluation of main grid with multiple DC feeds. J. Electr. Power Sci. Technol. 2023, 38, 216–225. [Google Scholar]
- Liu, J.; Zhang, L.; Zhao, B.; Li, X. Online dynamic black start strategy for multi-power microgrid with energy storage. Distrib. Util. 2023, 40, 13–20. [Google Scholar]
- Jasim, A.M.; Jasim, B.H.; Neagu, B.-C.; Alhasnawi, B.N. Coordination vontrol of a hybrid AC/DC smart microgrid with online fault detection, diagnostics, and localization using artificial neural networks. Electronics 2023, 12, 187. [Google Scholar] [CrossRef]
- Fu, Y.; Zhang, Y.; Tian, S.; Shen, J.; Li, H.; Geng, F. State estimation method of active distribution network resisting multi-point false data attack. Smart Power 2023, 51, 69–76+83. [Google Scholar]
- Xie, W.; Han, M.; Cao, W.; Guerrero, J.M.; Vasquez, J.C. Virtual resistance trade off design for DCMG grid-forming converters considering static-and large-signal dynamic constraints. IEEE Trans. Power Electron. 2020, 36, 5582–5593. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, Z.; Lu, X.; Wang, C. Research on coordinated control strategy of “optical storage direct and flexible” system considering DC power spring. Distrib. Util. 2023, 40, 82–92. [Google Scholar]
- Yi, R. Research on the defense mechanism based on FDIA in smart grid. Front. Comput. Intell. Syst. 2022, 2, 84–88. [Google Scholar] [CrossRef]
- Madichetty, S.; Mishra, S. Cyber attack detection and correction mechanisms in a distributed DC microgrid. IEEE Trans. Power Electron. 2021, 37, 1476–1485. [Google Scholar]
- Dehghani, M.; Niknam, T.; Ghiasi, M.; Bayati, N.; Savaghebi, M. Cyber-attack detection in DC microgrids based on deep machine learning and wavelet singular values approach. Electronics 2021, 10, 1914. [Google Scholar] [CrossRef]
- Huang, C.; Hong, M.; Fu, S. Distributed state estimation of active distribution network considering false data injection attack. Electr. Power Eng. Technol. 2022, 41, 22–31. [Google Scholar]
- Xie, Y.; Yan, X.; Sang, Z.; Yang, X.; Ying, M.; Zhou, Y. Fake data injection attack method for hybrid AC-DC systems. Electr. Power Eng. Technol. 2022, 41, 165–172. [Google Scholar]
- Xia, Y.S.; Wang, Y.; Zhou, L.; Fan, R.S. False data injection attack detection method based on improved generative adversarial network. Electr. Power Constr. 2022, 43, 58–65. [Google Scholar]
- Wang, B.; Peng, X.; Jiang, M.; Liu, D. Real-time fault detection for UAV based on model acceleration engine. IEEE Trans. Instrum. Meas. 2020, 69, 9505–9516. [Google Scholar] [CrossRef]
- Bhandari, G.; Lyth, A.; Shalaginov, A.; Grønli, T.-M. Distributed deep neural-network-based middleware for cyber-attacks detection in smart IoT ecosystem: A novel framework and performance evaluation approach. Electronics 2023, 12, 298. [Google Scholar] [CrossRef]
- Musleh, A.S.; Chen, G.; Dong, Z.Y. A survey on the detection algorithms for false data injection attacks in smart grids. IEEE Trans. Smart Grid 2019, 11, 2218–2234. [Google Scholar] [CrossRef]
- Yang, J.; Zhu, F.; Wang, X.; Bu, X. Robust sliding-mode observer-based sensor fault estimation, actuator fault detection and isolation for uncertain nonlinear systems. Int. J. Control Autom. Syst. 2015, 13, 1037–1046. [Google Scholar] [CrossRef]
- Liu, M.; Zhao, C.; Deng, R.; Cheng, P.; Chen, J. False data injection attacks and the distributed countermeasure in DC microgrids. IEEE Trans. Control Netw. Syst. 2022, 9, 1962–1974. [Google Scholar] [CrossRef]
- Yan, L.; Zhang, Y.; Xiao, B.; Xia, Y.; Fu, M. Fault detection for nonlinear systems with unreliable measurements based on hierarchy cubature Kalman filter. Can. J. Chem. Eng. 2018, 96, 497–506. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, D. Maximum correntropy cubature Kalman filter and smoother for continuous-discrete nonlinear systems with non-Gaussian noises. ISA Trans. 2023, 137, 436–445. [Google Scholar] [CrossRef] [PubMed]
- El Sayed, W.; Abd El Geliel, M.; Lotfy, A. Fault diagnosis of PMSG stator inter-turn fault using extended Kalman filter and unscented Kalman filter. Energies 2020, 13, 2972. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, W.; Sun, Y.; Trivedi, A.; Chung, C.; Srinivasan, D. Wind Power Forecasting in the presence of data scarcity: A very short-term conditional probabilistic modeling framework. Energy 2024, 291, 130305. [Google Scholar] [CrossRef]
- Tang, H.; Tang, Y.; Su, Y.; Feng, W.; Wang, B.; Chen, P.; Zuo, D. Feature extraction of multi-sensors for early bearing fault diagnosis using deep learning based on minimum unscented kalman filter. Eng. Appl. Artif. Intell. 2024, 127, 107138. [Google Scholar] [CrossRef]
- Yang, J.; Guo, Y.; Zhao, W. Long short-term memory neural network based fault detection and isolation for electro-mechanical actuators. Neurocomputing 2019, 360, 85–96. [Google Scholar] [CrossRef]
- Ma, Y.; Li, C.; Cao, Z.; Pan, L.; Yang, C.; Yang, Z. Robust dynamic state estimation method of power system based on data fusion technology. Smart Power 2023, 51, 78–84. [Google Scholar]
- Vafamand, A.; Moshiri, B.; Vafamand, N. Fusing unscented Kalman filter to detect and isolate sensor faults in DC microgrids with CPLs. IEEE Trans. Instrum. Meas. 2021, 71, 1–8. [Google Scholar] [CrossRef]
- Shao, S.; Yan, R.; Lu, Y.; Wang, P.; Gao, R.X. DCNN-based multi-signal induction motor fault diagnosis. IEEE Trans. Instrum. Meas. 2019, 69, 2658–2669. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Method | RMSE | RMSD | |
|---|---|---|---|---|
| CKF | 0.0099 | 0.0741 | 0.0357 | |
| Proposed method | 0.0108 | 0.0712 | 0.0302 | |
| CKF | 0.0142 | 0.0624 | 0.0421 | |
| Proposed method | 0.0120 | 0.0584 | 0.0367 | |
| CKF | 0.0142 | 0.0725 | 0.0483 | |
| Proposed method | 0.0097 | 0.0676 | 0.0321 | |
| CKF | 0.0129 | 0.0863 | 0.0546 | |
| Proposed method | 0.0099 | 0.0825 | 0.0474 |
| State | Method | RMSE | RMSD | |
|---|---|---|---|---|
| CKF | 0.1437 | 0.3524 | 0.2417 | |
| Proposed method | 0.0112 | 0.0693 | 0.0321 | |
| CKF | 0.1120 | 0.4351 | 0.3442 | |
| Proposed method | 0.0105 | 0.0542 | 0.0402 | |
| CKF | 0.1406 | 0.3346 | 0.3157 | |
| Proposed method | 0.0120 | 0.0443 | 0.0297 | |
| CKF | 0.2598 | 0.4887 | 0.4021 | |
| Proposed method | 0.0139 | 0.0632 | 0.0214 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, P.; Zhang, J.; Luo, S.; Song, Y.; Zhang, J.; Wang, Y. A Fusion Adaptive Cubature Kalman Filter Approach for False Data Injection Attack Detection of DC Microgrids. Electronics 2024, 13, 1612. https://doi.org/10.3390/electronics13091612
Wu P, Zhang J, Luo S, Song Y, Zhang J, Wang Y. A Fusion Adaptive Cubature Kalman Filter Approach for False Data Injection Attack Detection of DC Microgrids. Electronics. 2024; 13(9):1612. https://doi.org/10.3390/electronics13091612
Chicago/Turabian StyleWu, Po, Jiangnan Zhang, Shengyao Luo, Yanlou Song, Jiawei Zhang, and Yi Wang. 2024. "A Fusion Adaptive Cubature Kalman Filter Approach for False Data Injection Attack Detection of DC Microgrids" Electronics 13, no. 9: 1612. https://doi.org/10.3390/electronics13091612