
Disturbance Frequency Trajectory Prediction in Power Systems Based on LightGBM Spearman
 , ,
, ,
Abstract
:1. Introduction
- (1)
- A frequency trajectory prediction method for low-inertia systems’ frequency risk is proposed, which integrates the K-means clustering algorithm and the Spearman coefficient, obtaining electrical quantities that are strongly correlated with the system’s frequency stability;
- (2)
- Based on key electrical quantities, a frequency trajectory prediction model is built using LightGBM. This model achieves accurate prediction of disturbed frequency trajectories. The effectiveness of the proposed method is verified on the New England 10-machine 39-bus system, constructed on the CloudPSS full-electromagnetic cloud simulation platform.
2. Dynamic Frequency Trajectory Prediction Based on LightGBM
3. Feature Selection of Dynamic Frequency Prediction Based on Spearman Coefficient
3.1. Feature Selection for Dynamic Frequency Prediction in the System
3.2. Feature Correlation Analysis for Disturbed System Dynamic Frequency Prediction
3.3. Trajectory Prediction Based on the LightGBM Spearman Method
- (1)
- Simulation Model Construction: Utilize the CloudPSS full electromagnetic cloud simulation platform to build an IEEE 39-node electromagnetic simulation model. Set typical active power disturbances in the system and record the transient process data of electrical quantities at system nodes to form a frequency prediction dataset;
- (2)
- Clustering and Feature Selection: Apply the K-means algorithm to cluster related electrical quantities for frequency prediction. Determine the optimal number of clusters using the elbow method. Based on the clustering results, identify and eliminate similar redundant feature quantities;
- (3)
- Feature Correlation and Dimension Reduction: Calculate the correlation between the redundant-free feature quantities and the post-disturbance frequency trajectory of the system. Select feature quantities sensitive to the frequency trajectory to further reduce the dimensions of the model’s input;
- (4)
- Model Construction and Evaluation: Build a LightGBM model for predicting frequency trajectory. Use the dimension-reduced feature quantities obtained in step (3) as inputs to train the prediction model. Assess the model’s performance using various evaluation metrics.
4. Case Study Analysis
4.1. Validation Case Study Introduction
4.2. Feature Selection Result Analysis
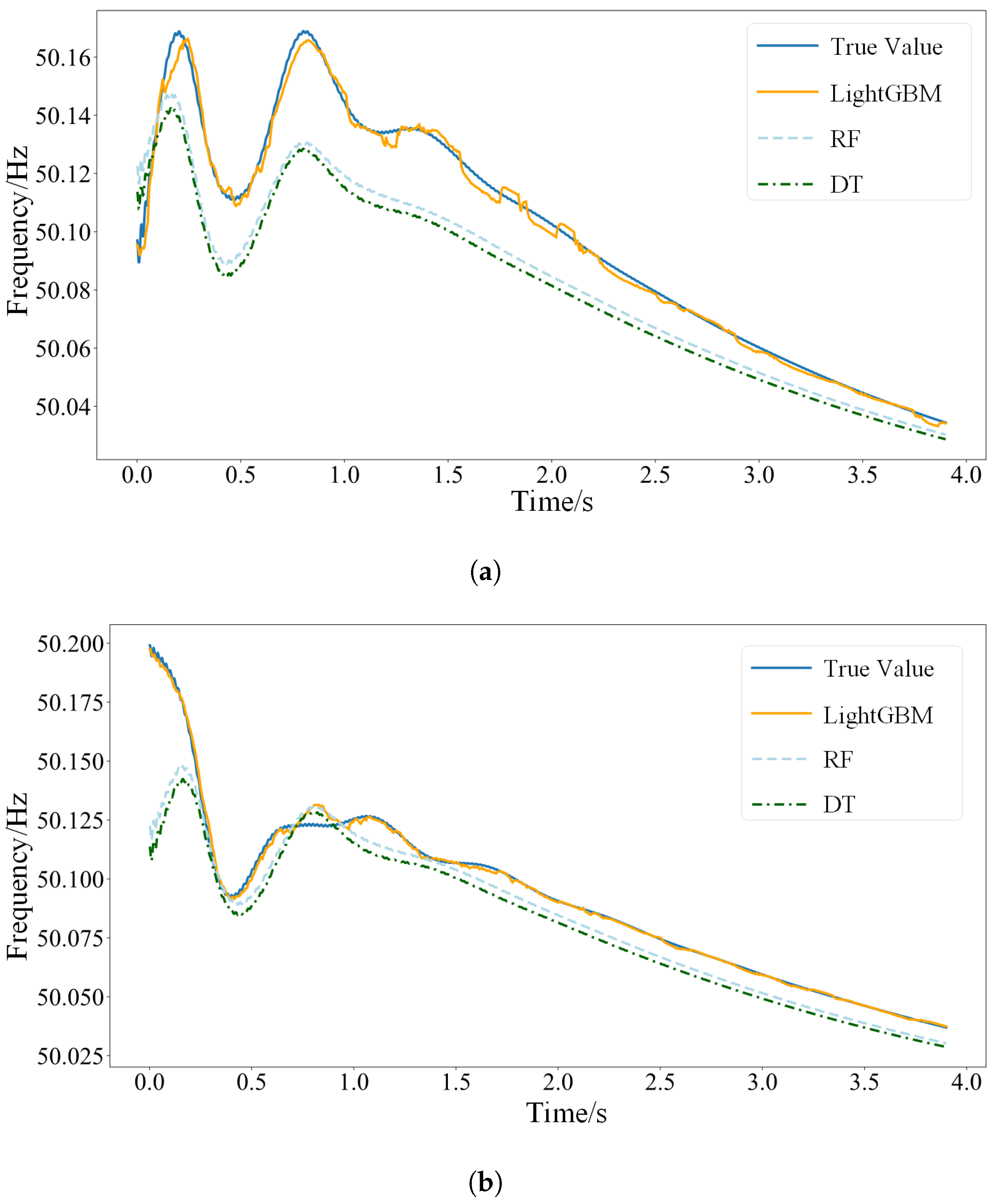
4.3. Frequency Prediction Result Analysis
4.4. Analysis of Prediction Results with Different Feature Combinations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kang, C.Q.; Du, E.S.; Guo, H.Y.; Li, Y.W.; Fang, Y.C.; Zhang, N.; Zhong, H.W. Primary Exploration of Six Essential Factors in New Power System. Power Syst. Technol. 2023, 42, 1741–1750. [Google Scholar]
- Lai, Q.P.; Xiao, T.N.; Li, D.S.; Shen, C. Low Voltage Ride-through Modeling for Wind Turbines Based on Neural ODEs. J. Syst. Simul. 2022, 34, 2546–2556. [Google Scholar]
- Wang, M.J.; Guo, J.B.; Ma, S.C. Review of Transient Frequency Stability Analysis and Frequency Regulation Control Methods for Renewable Power Systems. Proc. CSEE 2023, 43, 1672–1694. [Google Scholar]
- GB 38755-2019; Guidelines for Safety and Stability of Power Systems. State Administration for Market Regulation: Beijing, China, 2019.
- Sun, H.; Xu, S.; Xu, T.; Bi, J.; Zhao, B.; Guo, Q.; He, J.; Song, R. Research on Definition and Classification of Power System Security and Stability. Proc. CSEE 2022, 42, 7796–7808. [Google Scholar]
- Dong, W.J.; Liu, K.Y.; Wang, Y.L.; Li, X.Z.; Hao, Y. Adaptive Control Method of High Proportion Distributed Generation Connected to Distribution Network. J. Syst. Simul. 2020, 32, 2052–2058. [Google Scholar]
- Lu, Z.X.; Jiang, J.H.; Qiao, Y.; Min, Y.; Li, H. A Review on Generalized Inertia Analysis and Optimization of New Power Systems. Proc. CSEE 2023, 43, 1754–1776. [Google Scholar]
- Wang, Q.; Li, F.; Tang, Y.; Xu, Y. Integrating Model-Driven and Data-Driven Methods for Power System Frequency Stability Assessment and Control. IEEE Trans. Power Syst. 2019, 34, 4557–4568. [Google Scholar] [CrossRef]
- Zhao, Q.Q.; Wang, X.R. A fast predictive algorithm for power system post disturbances steady frequency. Power Syst. Prot. Control 2011, 39, 72–77. [Google Scholar]
- Chan, M.L.; Dunlop, R.D.; Schweppe, F. Dynamic Equivalents for Average System Frequency Behavior Following Major Disturbances. IEEE Trans. Power Appar. Syst. 1972, PAS-91, 1637–1642. [Google Scholar] [CrossRef]
- Anderson, P.M.; Mirheydar, M. A low-order system frequency response model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef]
- Peng, A.; Teng, Y.; Wang, X. Prediction Algorithm of Steady Frequency after Disturbances Considering Emergency DC Power Support. Autom. Electr. Power Syst. 2017, 41, 92–99. [Google Scholar]
- Shan, Y.; Hu, J.; Chan, K.W.; Fu, Q.; Guerrero, J.M. Model Predictive Control of Bidirectional DC–DC Converters and AC/DC Interlinking Converters—A New Control Method for PV-Wind-Battery Microgrids. IEEE Trans. Sustain. Energy 2019, 10, 1823–1833. [Google Scholar] [CrossRef]
- Yang, H.; Meng, Q.; Zhang, Y.; Hao, Z.; He, J. An Online Prediction Model of Power System Frequency Nadir Based on Polynomial Fitting of Power-frequency Characteristics. Proc. CSEE 2022, 42, 115–125. [Google Scholar]
- Zhang, Y.; Wen, D.; Wang, X.; Lin, J. A Method of Frequency Curve Prediction Based on Deep Belief Network of Post-disturbance Power System. Proc. CSEE 2019, 39, 5095–5104. [Google Scholar]
- Hu, Y.; Wang, X.; Teng, Y. Frequency Stability Control Method of AC/DC Power System Based on Multi-layer Support Vector Machine. Proc. CSEE 2019, 39, 4104–4118. [Google Scholar]
- Shan, Y.; Hu, J.; Shen, B. Distributed Secondary Frequency Control for AC Microgrids Using Load Power Forecasting Based on Artificial Neural Network. IEEE Trans. Ind. Inform. 2024, 20, 1651–1662. [Google Scholar] [CrossRef]
- Yu, L.; Wang, Z.; Hao, Y.; Yan, X.; Zhang, L.; Yan, G.; Wen, Y. XGBoost-based Power System Dynamic Frequency-Response Curve Prediction. Electr. Power Constr. 2023, 44, 74–81. [Google Scholar]
- Zhang, L.; Li, H.; Xiong, Z.; Guo, Z.; Ye, J.; Li, Z.; Yang, N.; Cai, Y. Short-Term Prediction Method Based on Interpretable XGBoost for Power System Inertia. Electr. Power Constr. 2023, 44, 22–30. [Google Scholar]
- Bao, H.; Wu, Y.; Zhang, G.; Li, J.; Guo, X.; Li, J. Net Load Forecasting Method Based on Feature-Weighted Stacking Ensemble Learning. Electr. Power Constr. 2022, 43, 104–116. [Google Scholar]
- Wang, Y.; Tai, K.; Song, Y.; Kou, R.; Zheng, Z.; Zeng, Q. Research on Double-Deck Traceability Identification Method of Commutation Failure in HVDC System. IEEE Access 2021, 9, 108392–108401. [Google Scholar] [CrossRef]
- Zheng, Z.; Xu, Y.; Mili, L.; Liu, Z.; Korkali, M.; Wang, Y. Obuservability analysis of a power system stochastic dynamic model using a derivative-free approach. IEEE Trans. Power Syst. 2021, 36, 5834–5845. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, Q.; Mili, L.; Zheng, Z.; Gu, W.; Lu, S.; Wu, Z. A data-driven koopman approach for power system nonlinear dynamic observability analysis. IEEE Trans. Power Syst. 2023. [Google Scholar] [CrossRef]
- Xu, Y.; Mili, L.; Sandu, A.; von Spakovsky, M.R.; Zhao, J. Propagating uncertainty in power system dynamic simulations using polynomial chaos. IEEE Trans. Power Syst. 2018, 34, 338–348. [Google Scholar] [CrossRef]
- Mehmood, F.; Ghani, M.U.; Ghafoor, H.; Shahzadi, R.; Asim, M.N.; Mahmood, W. EGD-SNet: A computational search engine for predicting an end-to-end machine learning pipeline for Energy Generation & Demand Forecasting. Appl. Energy 2022, 324, 119754. [Google Scholar]
- Liu, J.; Yang, G.; Wang, X. A Wind Turbine Fault Diagnosis Method Based on Siamese Deep Neural Network. J. Syst. Simul. 2022, 34, 2348–2358. [Google Scholar]
- Liu, X.; Wang, Y.; Ji, Z. Short-term Wind Power Prediction Method Based on Random Forest. J. Syst. Simul. 2021, 33, 2606–2614. [Google Scholar]
- Xu, X.; Hu, W.; Wang, C.; Li, Y.; Zhang, P.; Zheng, L.; Wu, S. Short-term Power Load Forecasting Based on CNN-BiLSTM. Proc. CSEE 2018, 38, 2232–2238. [Google Scholar]
- Gao, H.; Cai, G.; Yang, D.; Wang, L.; Yang, H. Feature selection approach based on FCC-eAI in static voltage stability margin estimation. Electr. Power Autom. Equip. 2023, 43, 168–176. [Google Scholar]
- Chen, Z.; Han, X.; Fan, C.; Zheng, T.; Mei, S. A Two-Stage Feature Selection Method for Power System Transient Stability Status Prediction. Energies 2019, 12, 689. [Google Scholar] [CrossRef]
- Ke, J.; Zhe, Y.; Chao, W.; Liming, Z.; Yanbin, L.; Tianshu, B. Pilot Protection Based on Spearman Rank Correlation Coefficient for Transmission Line Connected to Renewable Energy Source. Autom. Electr. Power Syst. 2020, 44, 103–111. [Google Scholar]
- Gao, S.; Song, Y.; Chen, Y.; Yu, Z.; Zhang, R. Fast Simulation Model of Voltage Source Converters With Arbitrary Topology Ulsing Switch-StatePrediction. IEEE Trans. Power Electron. 2022, 37, 12167–12181. [Google Scholar] [CrossRef]
- Gao, S.; Tan, Z.; Song, Y.; Chen, Y.; Shen, C.; Yu, Z. Accuracy Enhancement of Shifted Frequency-Based Simulation Using Root Matching and EmbeddedSmall-Step. IEEE Trans. Power Syst. 2022, 38, 3345–3357. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Feature Number | Feature Description |
|---|---|
| f1 | System load level |
| f2 | Post-disturbance system power deficit value |
| f3 | Degree of each generator’s response to dynamic frequency |
| f4 | Root mean square of bus voltages after disturbance |
| f5–6 | Mechanical power of generators before and after disturbance |
| f7–9 | Total mechanical power of the system before and after disturbance |
| f9–10 | Electromagnetic power of generators before and after disturbance |
| f11–12 | Total electromagnetic power of the system before and after disturbance |
| f13–14 | Reactive power of generators before and after disturbance |
| f15–16 | Total reactive power of the system before and after disturbance |
| f17–18 | Active and reactive loads of the system after disturbance |
| f19 | Total active load of the system after disturbance |
| f20 | Total reactive load of the system after disturbance |
| Category | Applicable Conditions | Rank Sensitivity | Sensitivity to Outliers |
|---|---|---|---|
| Spearman | Approximately Monotonic | Yes | No |
| Pearson | Linear Relationship | No | Yes |
| Kendall | Non-Linear Relationship | Yes | No |
| Feature | Feature Quantity | Weight |
|---|---|---|
| f2 | Post-Disturbance System Power Deficit | 0.1499 |
| f1 | System Load Level | 0.1057 |
| f4 | Root Mean Square of Bus Voltages after Disturbance | 0.0876 |
| f16 | Total Reactive Power of the System after Disturbance | 0.0789 |
| f11 | Total Electromagnetic Power of the System Before and after Disturbance | 0.0783 |
| f9 | Electromagnetic Power of Generators Before Disturbance | 0.0781 |
| f10 | Electromagnetic Power of Generators after Disturbance | 0.0724 |
| f14 | Reactive Power of Generators after Disturbance | 0.0684 |
| f12 | Total Electromagnetic Power of the System after Disturbance | 0.0634 |
| f17 | Active Load of the System after Disturbance | 0.0582 |
| f3 | Degree of Each Generator’s Response to Dynamic Frequency | 0.0391 |
| f20 | Total Reactive Load of the System after Disturbance | 0.0361 |
| Total | Twelve Features | 0.9161 |
| Index | LightGBM–Spearman | LSTM | CNN | BPNN | DT | RF | ||
|---|---|---|---|---|---|---|---|---|
| Number of features | 12 | 10 | 8 | 12 | 12 | 12 | 12 | 12 |
| MSE/10−4 Hz | 1.131 | 1.610 | 1.842 | 1.597 | 1.602 | 1.687 | 34.256 | 21.214 |
| MAE/10−2 Hz | 2.567 | 2.997 | 3.025 | 2.732 | 2.796 | 2.844 | 14.096 | 10.013 |
| R2 | 0.989 | 0.984 | 0.981 | 0.981 | 0.979 | 0.973 | 0.605 | 0.771 |
| Feature Weight Sum | MSE/10−5 Hz | MAE/10−3 Hz | R2 | Training Time (s) |
|---|---|---|---|---|
| 50% | 2.303 | 3.579 | 0.973 | 7.06 |
| 70% | 1.612 | 2.992 | 0.981 | 8.03 |
| 90% | 1.335 | 2.723 | 0.984 | 8.76 |
| Random 12 Features | 5.643 | 7.016 | 0.915 | 8.93 |
| All Features | 1.432 | 2.853 | 0.983 | 9.48 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, C.; Liu, M.; Peng, J.; Wang, Y.; Liu, Y.; Gao, S.; Zheng, Z.; Liao, J. Disturbance Frequency Trajectory Prediction in Power Systems Based on LightGBM Spearman. Electronics 2024, 13, 597. https://doi.org/10.3390/electronics13030597
Xing C, Liu M, Peng J, Wang Y, Liu Y, Gao S, Zheng Z, Liao J. Disturbance Frequency Trajectory Prediction in Power Systems Based on LightGBM Spearman. Electronics. 2024; 13(3):597. https://doi.org/10.3390/electronics13030597
Chicago/Turabian StyleXing, Chao, Mingqun Liu, Junzhen Peng, Yuhong Wang, Yixiong Liu, Shilin Gao, Zongsheng Zheng, and Jianquan Liao. 2024. "Disturbance Frequency Trajectory Prediction in Power Systems Based on LightGBM Spearman" Electronics 13, no. 3: 597. https://doi.org/10.3390/electronics13030597