1. Introduction
Recently, the vigorous development of the automobile industry has also brought many problems to society, among which air pollution and energy consumption are the most prominent [
1]. To reduce dependence on oil and other energy sources, road traffic becomes key [
2,
3]. At present, more and more people are choosing electric vehicles when buying vehicles [
4,
5]. Compared with traditional fuel vehicles, existing new energy vehicles can reduce carbon emissions by about 15 million tons per year. The electric vehicle industry has been further developed under the drive of a low-carbon economy and a new energy strategy. However, its travel reliability still needs to be improved [
6,
7].
Mileage anxiety has become a core concern for consumers. As the supporting facilities for new energy vehicles, charging piles are also in a rapid development stage. Before 2020, the advanced construction mode was adopted for the construction of charging stations. Although this mode can increase the number of charging piles rapidly, it is not a benign demand-driven construction mode. As of March 2022, the ratio of car piles in China was about 2.9:1. However, according to statistical data, in 2021 the average utilization rate of public charging piles in 22 cities in China was less than 10%. The main reason for the low service efficiency of public charging piles in big cities was uneven distribution.
At present, the cruising range of electric vehicles has increased, but it is still difficult to meet the needs of users. In particular, vehicles such as taxis and ride-hailing vehicles have a greater need for charging due to their long daily mileage [
8,
9]. Taxi travel is bound to have a close connection with the urban road network. The driving characteristics and charging behavior of taxis will be affected by passengers’ travel rules, urban road network structure, and the distribution of charging facilities [
10,
11]. Conversely, taxi drivers’ driving habits and vehicle battery life will also have a great impact on road traffic flow. Therefore, the establishment of an accurate charging demand model for electric vehicles will be beneficial to the prediction of charging load. It is also the premise of charging station site selection.
Previously, it was difficult to collect trajectory data on electric taxis. Therefore, some scholars used the trajectory of fuel vehicles to replace the trajectory of electric vehicles in research on charging demand forecasting [
12,
13,
14]. Kontou et al. [
14] studied the relationship between the coverage rate of public charging facilities and charging probability by using the trajectory data of oil-fired taxis. Due to the different types of vehicles, taxi drivers’ driving habits will change accordingly. Obviously, the results obtained by using the trajectory of fuel vehicles will not conform to the actual situation. With the continuous improvement of data, many scholars have also begun to use electric vehicle trajectory data for charging demand prediction and site selection planning [
8,
15,
16,
17].
To some extent, the charging demand forecasting model based on the trajectory data of electric vehicles describes the spatial and temporal distribution characteristics of the charging load. However, it only considers the load characteristics of electric vehicles and ignores the randomness of movement which is easily affected by traffic factors in the process of vehicle driving. To this end, Xu et al. [
18] predicted the charging demand of charging stations by analyzing the dynamic driving process of vehicles. In the process of analysis, information such as traffic conditions and power grid status is also included in this study. Tang et al. [
19] and Xing et al. [
20] introduced the theory of the traffic travel chain into research on the charging demand predictions of electric vehicles.
The charging demand forecast is the basis for planning the location of charging stations. According to the spatiotemporal distribution characteristics of electric vehicle charging demand, it is possible to better discover charging hotspots and inappropriate sites. From the perspective of the facility location model, the classic facility location models include the median model [
21], the central model, and the coverage model [
22]. With the deepening of research, the extended location problem was developed from the classic location model. The extended location problem can be divided into many categories according to the different practical application problems, such as the asymptotic coverage model, the alternate coverage model, and the hierarchical location and competitive location model. The OD matrix is often used to describe the characteristics of vehicle travel distribution [
23,
24]. From the optimization goal, the location model is mainly divided into three categories. The first category is the model established from the user’s point of view, such as the model with the minimum charging cost of electric vehicles [
25], the model with the highest charging satisfaction [
26], etc. The second type is the model established from the perspective of the enterprise, such as the model with the smallest operating cost [
27,
28], and the model with the highest utilization rate of charging piles [
29,
30]. The third category is the model established by taking into account the interests of users and enterprises [
31,
32,
33]. Further, according to the existing research, we can calculate the carbon dioxide emissions produced by this trip through the mileage of the vehicle [
34,
35,
36,
37]. This allows a better comparison of the environmental impact of using a gasoline vehicle versus using an electric vehicle.
The intelligent optimization algorithm is usually used to solve the location problem. The whale optimization algorithm (WOA) is a new intelligence optimization algorithm [
38]. The WOA has the advantages of simple operation and fast convergence but also has the disadvantage of low solution accuracy, and it is easy to fall into local optimal solutions [
31,
39,
40]. Zhang et al. [
31] applied the WOA to the solution of the location model. After improving the WOA from many aspects, it was found that the convergence speed is improved. Kaur and Arora [
40] introduced chaos theory into the optimization process of the WOA. These improved strategies are mainly reflected in the aspects of population initialization, adaptive weights, and local variation. These improved strategies have improved the performance of the WOA to a certain extent, but their effectiveness in solving the location problem remains to be verified.
At present, although some progress has been made in the research on charging demand prediction and site selection, they are all based on their own characteristic parameters and assumptions. Too many assumptions can make the end result too idealistic.
Above all, this paper proposes a charging station location optimization model considering dynamic charging demand and carbon emissions. The contributions of this paper are as follows:
- (1)
At present, most of the research on the location of charging stations does not fully understand the charging demand of each station, and it is difficult to satisfy the interests of all parties. Therefore, this paper considers the influence of dynamic charging demand on site selection when establishing the location model.
- (2)
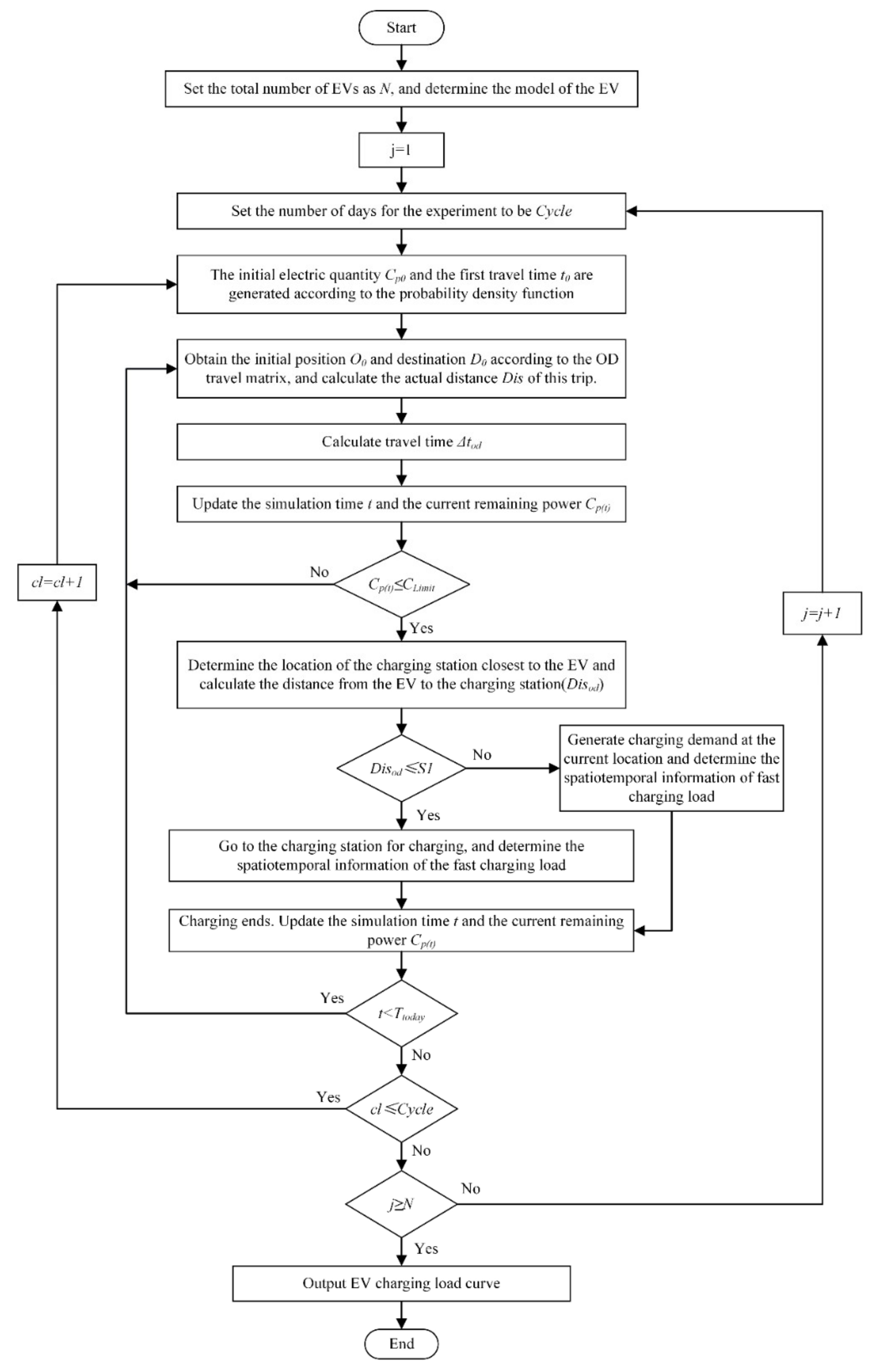
A forecasting model of electric vehicle charging demand based on travel chain data is constructed. Through the analysis of vehicle trajectory, the characteristic parameters of vehicle travel and charging are obtained, and the charging model of a single electric vehicle is constructed. In order to better simulate the daily driving state of the vehicle, this paper fully considers the influence of various uncertain real factors on the simulation.
- (3)
A site selection model aiming at the minimum comprehensive cost was established. The impact of different siting options on carbon emissions was explored. We further analyzed the influence of replacing electric vehicles with fuel vehicles on carbon emissions under the same conditions.
- (4)
The whale optimization algorithm is improved from four aspects. The effectiveness of the improved algorithm is analyzed by reference test function and location model.
The paper is organized as follows.
Section 2 introduces the data processing process and constructs the OD travel matrix;
Section 3 introduces the charging station location optimization model;
Section 4 introduces the solution method of the location model and the improvement of the whale optimization algorithm; and
Section 5 contains the case analysis. The last section is a summary of the thesis.
2. Data Description and Preprocessing
2.1. Data Description and Preprocessing
This study uses open data provided by Rutgers University Assistant Professor Desheng Zhang’s research group for analysis and processing [
41]. This dataset contains 1,155,654 GPS records of 664 electric taxis located in Shenzhen, China, on 22 October 2014.
Table 1 shows the data content:
In addition, the passenger-carrying state of the vehicle can be judged by the change in the driving speed and the track point time. Compared with the study of fuel vehicles trajectory, there are many advantages of using electric taxi trajectory analysis. Currently, electric taxi drivers in Shenzhen can also take orders online. Therefore, to a certain extent, the city’s taxis can be regarded as online car-hailing. Since most network car services can provide point-to-point services, the user’s travel purpose is relatively clear. Compared with traditional taxis, electric taxis that can take orders online will have a lower no-load rate and less redundant data in the data set. The origin-destination (OD) travel matrix constructed according to its trajectory is also more in line with the travel laws of modern residents.
In order to avoid the interference of the noise data in the original data set with the experimental results, the original data need to be preprocessed. Pre-processing includes two parts: time format conversion and cleaning of damaged data. The following data were mainly deleted: data with missing values, data not within the scope of Shenzhen, data with a passenger-carrying distance of less than 500 m, data with a stationary time of less than 60 s, etc.
After the data preprocessing was completed, the data were visualized.
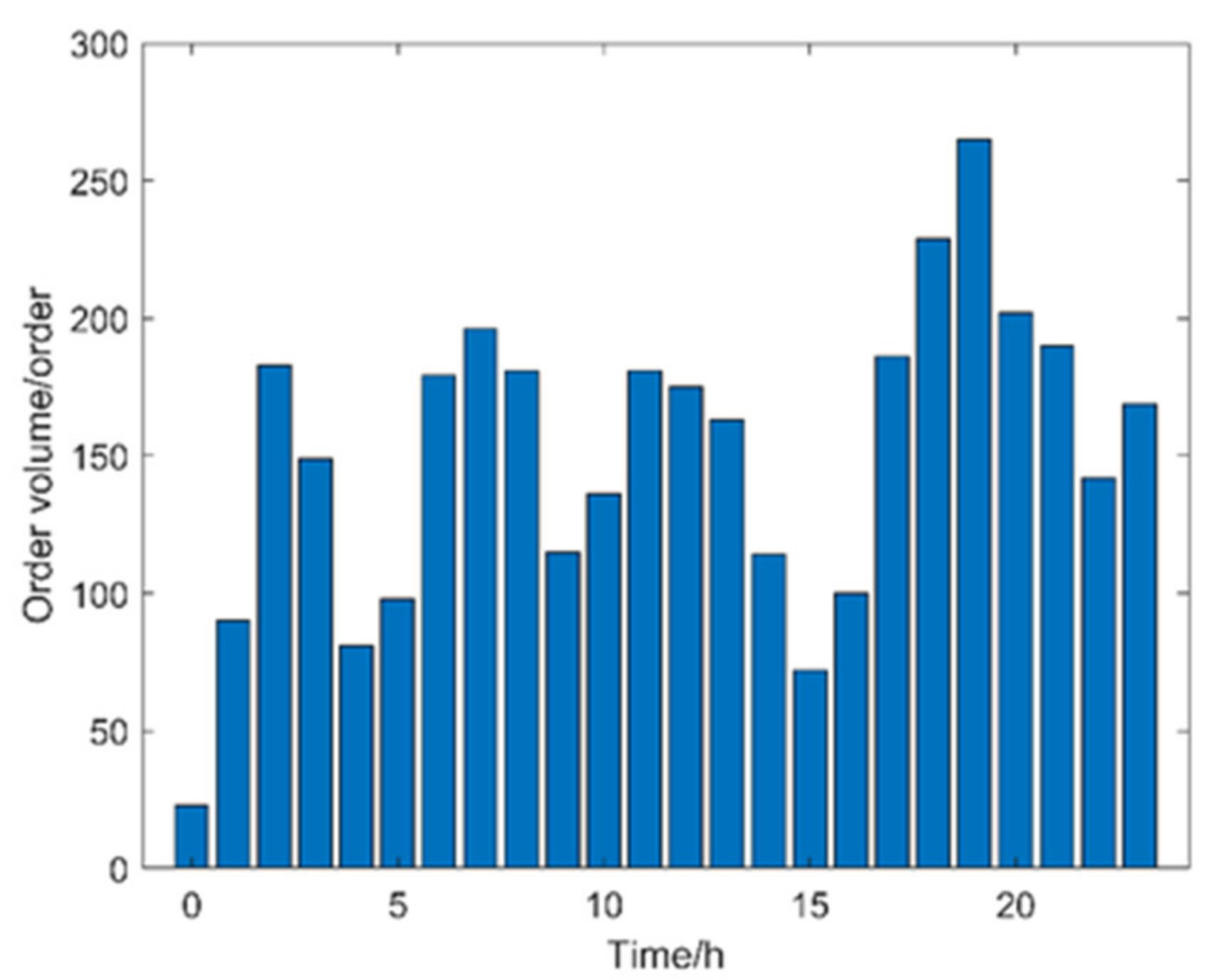
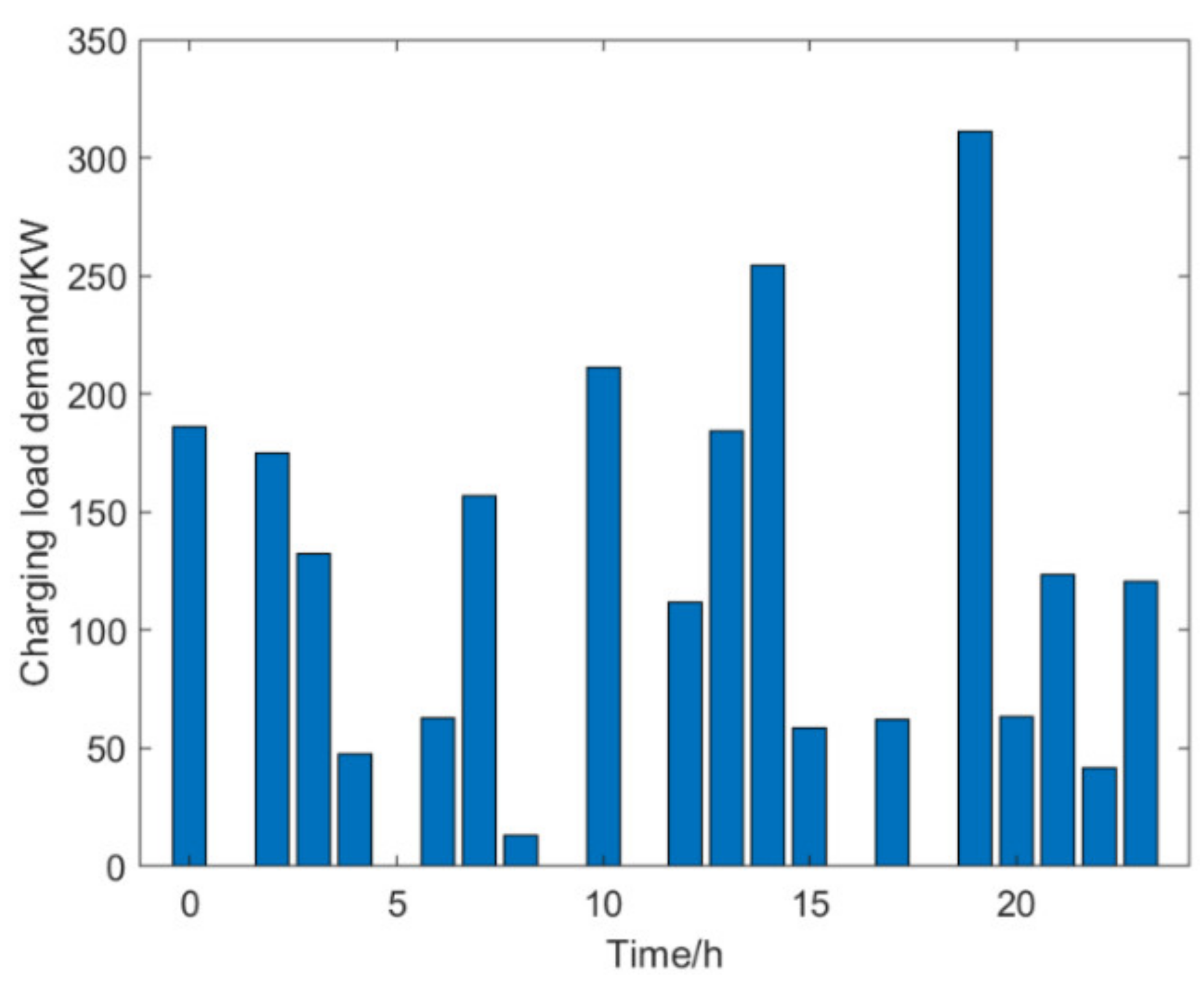
Figure 1 shows the change in order volume at different times during the day. As can be seen from
Figure 1, the order volume shows multiple peaks within a day, and the change curve shows a wavy distribution. At 0:00, the order volume is the least, with only 23 orders. We have analyzed this from two aspects: taxi drivers mostly change shifts at about 0:00, and the evening peak is about to end. At 19:00, the number of orders reached a peak of 269 orders due to the off-duty peak period and at night.
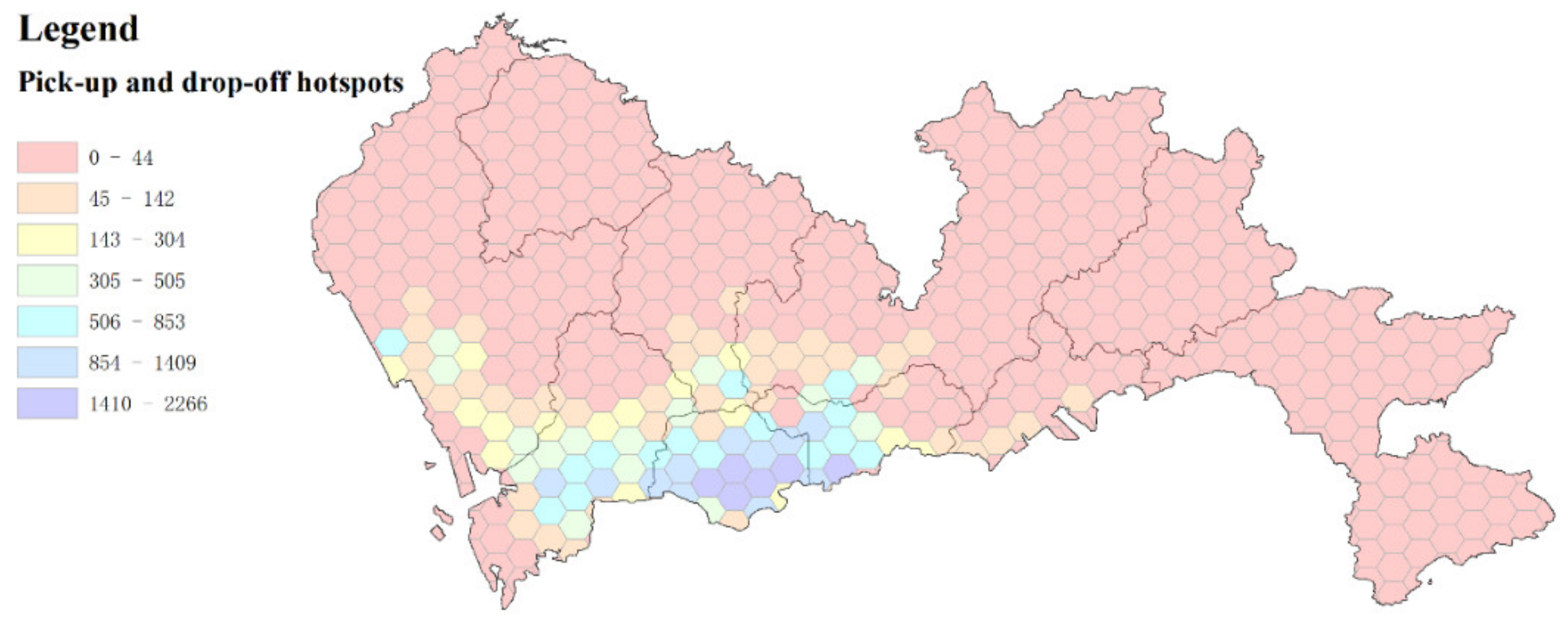
Next, we visualized the pick-up and drop-off points for passengers throughout the day.
As can be seen in
Figure 2, hot spots are mainly concentrated in coastal areas such as Nanshan District. Luohu District is adjacent to Hong Kong. It can be seen that the geographical areas along the coast or near international cities are very attractive to tourists.
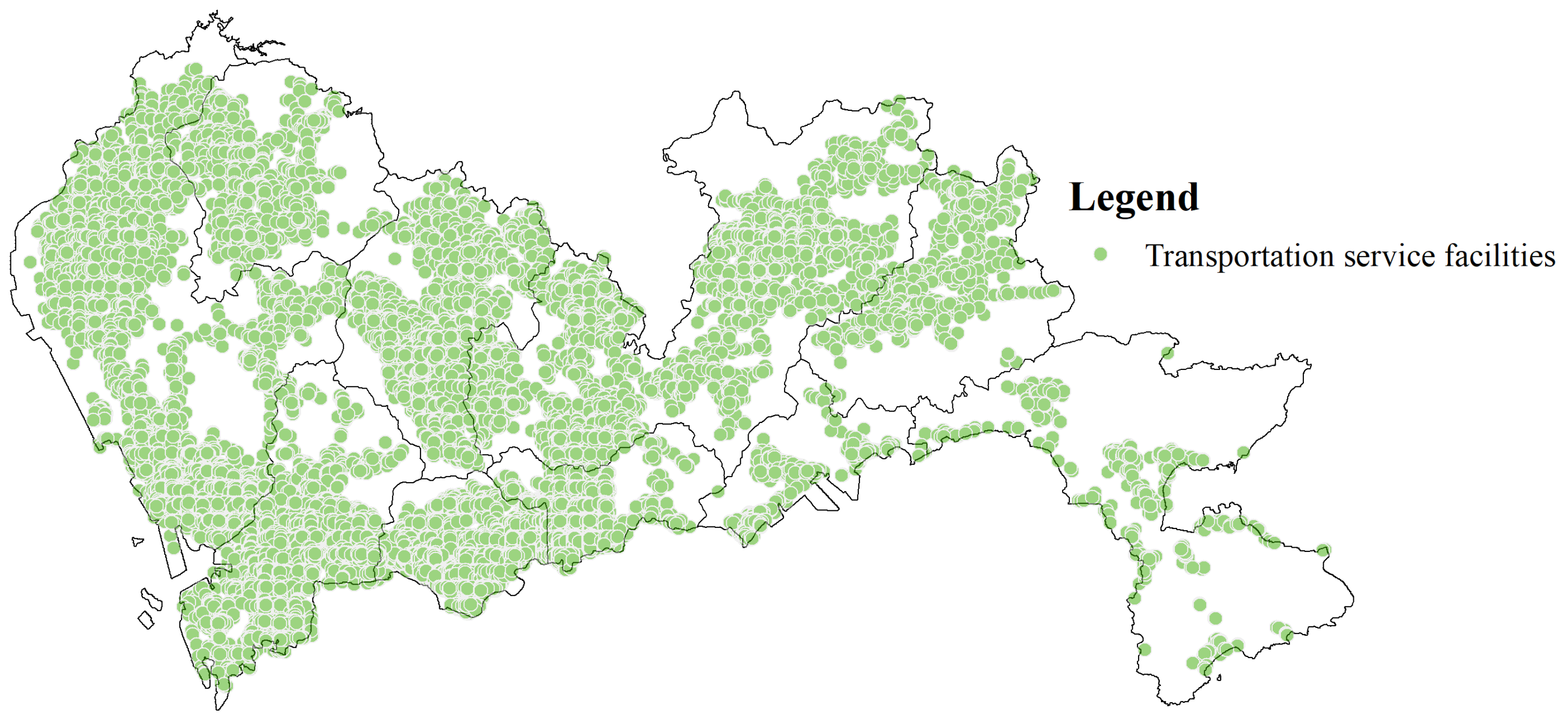
In order to have an intuitive understanding of Shenzhen’s traffic service level, we visualized the location distribution of Shenzhen’s traffic infrastructure, as shown in
Figure 3. The green dots represent transportation infrastructure. As can be seen from the figure, more facilities are found in the west than in the east.
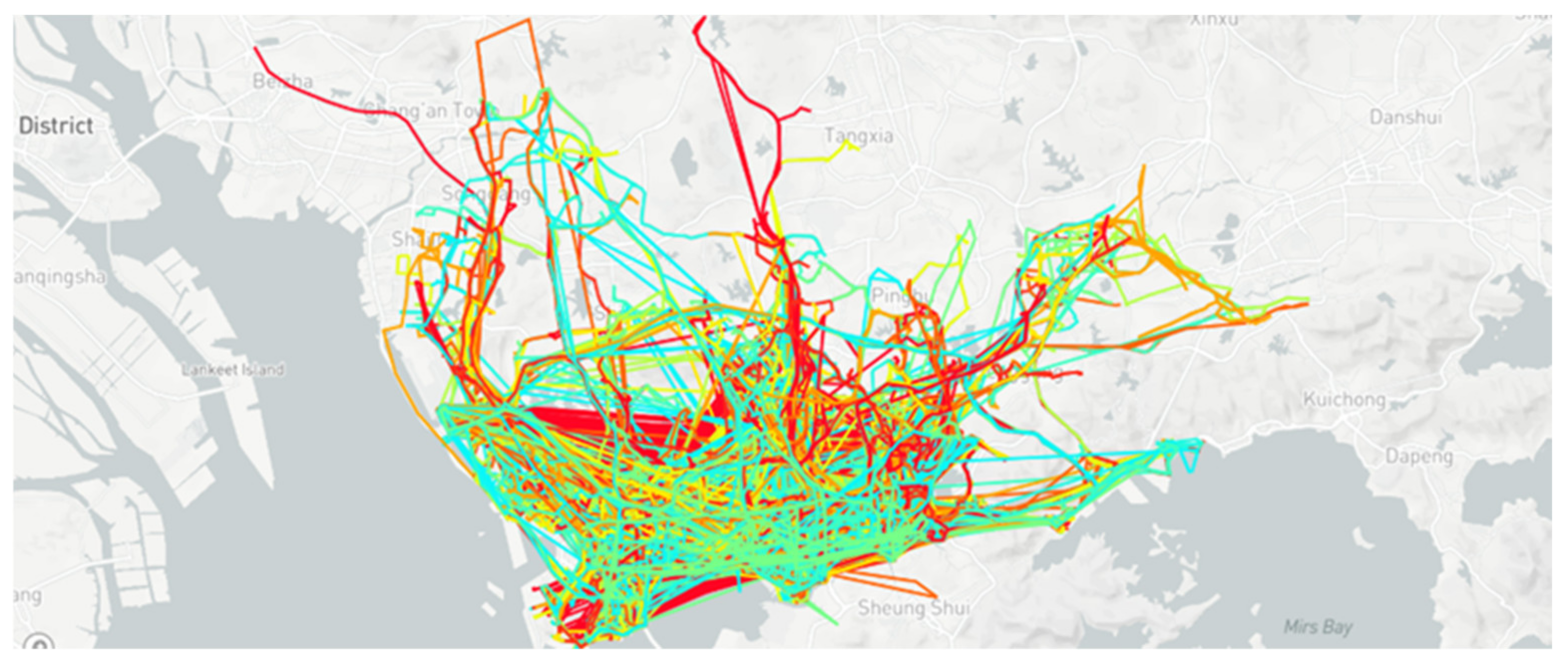
Figure 4 shows the driving tracks of 664 taxis in one day. It can be seen from the figure that the hot activity areas of electric taxis are basically the same as the hot spots for getting on and off.
2.2. The OD Travel Matrix
The origin-destination (OD) travel matrix reflects the travel information of residents or vehicles between the starting point and the ending point. The OD matrix is often used to describe the characteristics of vehicle travel distribution [
42]. According to the OD matrix, the travel characteristics of various types of electric vehicles in the urban road network can be described.
The moving position data includes longitude, latitude, time, and other information [
8]. In
,
and
, respectively, represent the longitude and latitude of point
i of the travel trajectory
, and
represents the time of point
i,
, then the trajectory
can be expressed as:
.
In order to facilitate the rapid statistics of traffic demand in the grid, the longitude and latitude of traffic demand location points are converted into grid numbers. Through the analysis of the grid, the traffic demand in the grid can be calculated indirectly. The grid division method involved dividing the study area into equal squares at a certain interval. The partition interval is denoted by W. When W is 0.01, it means that the research area is divided into several grids of equal size with an interval of 0.01°. In the longitude direction, when the two points are separated by 0.01°, the actual distance is about 900 m. When the two points are separated by 0.01° in the latitude direction, the actual distance is about 1100 m.
is defined as the coordinates of the lower left corner node of the research area grid,
is the coordinates of the upper right corner node of the research area grid, and
is the latitude and longitude coordinates of any node in the grid.
is the number of the grid where
is located, and the grid node number is
.
The latitude and longitude range of the pre-processed taxi data: longitude from 113.68° to 114.4°, latitude from 22.46° to 22.88°.
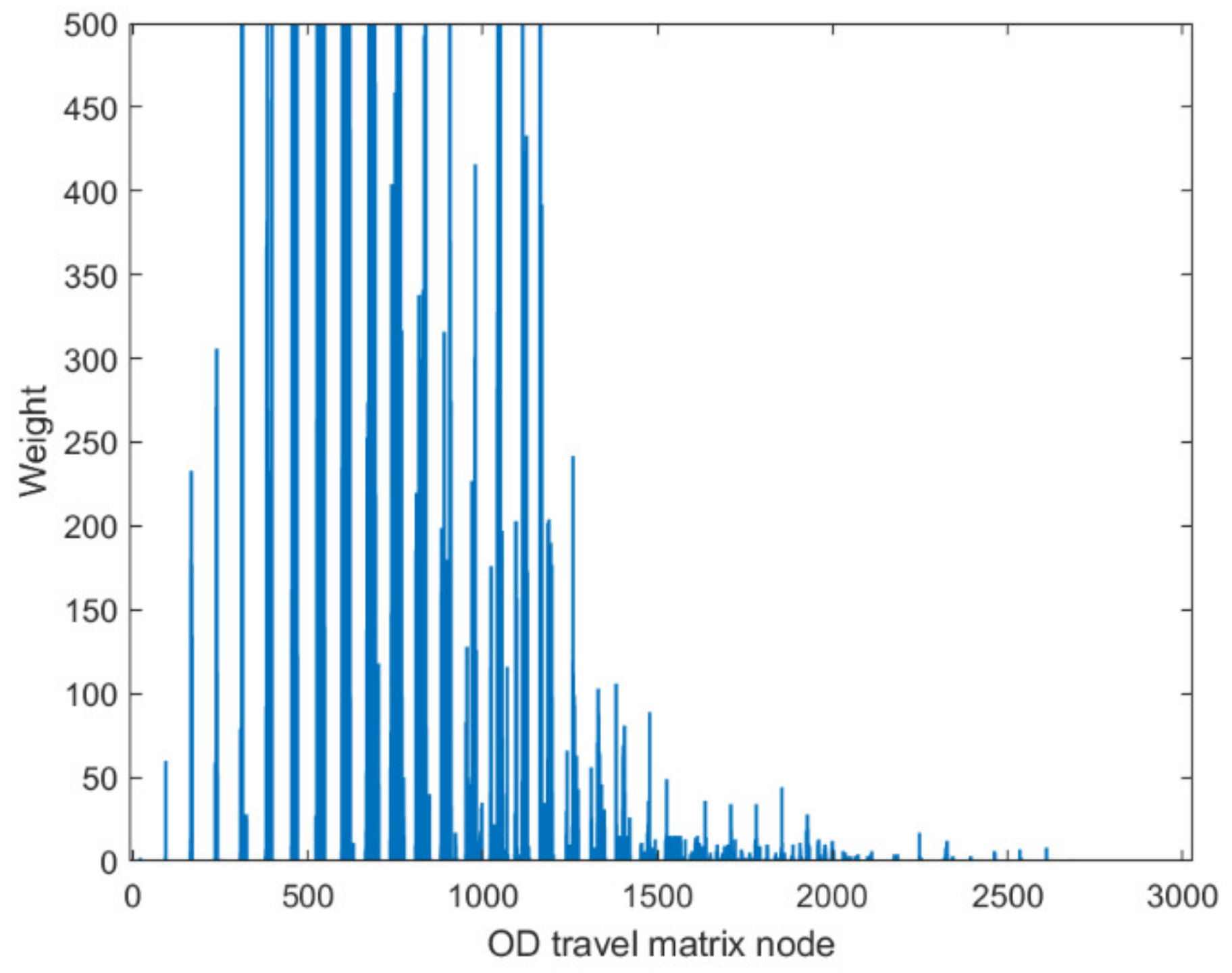
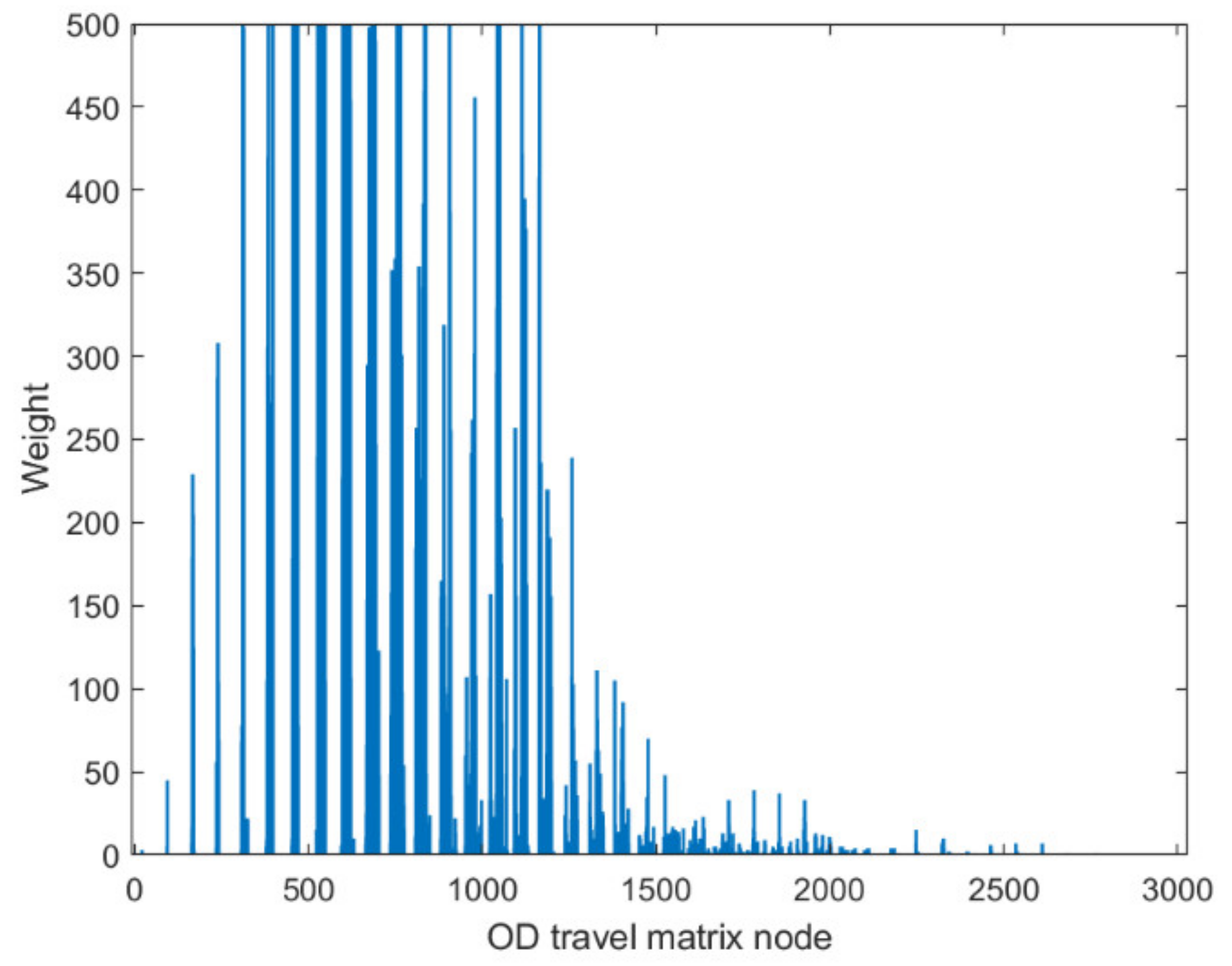
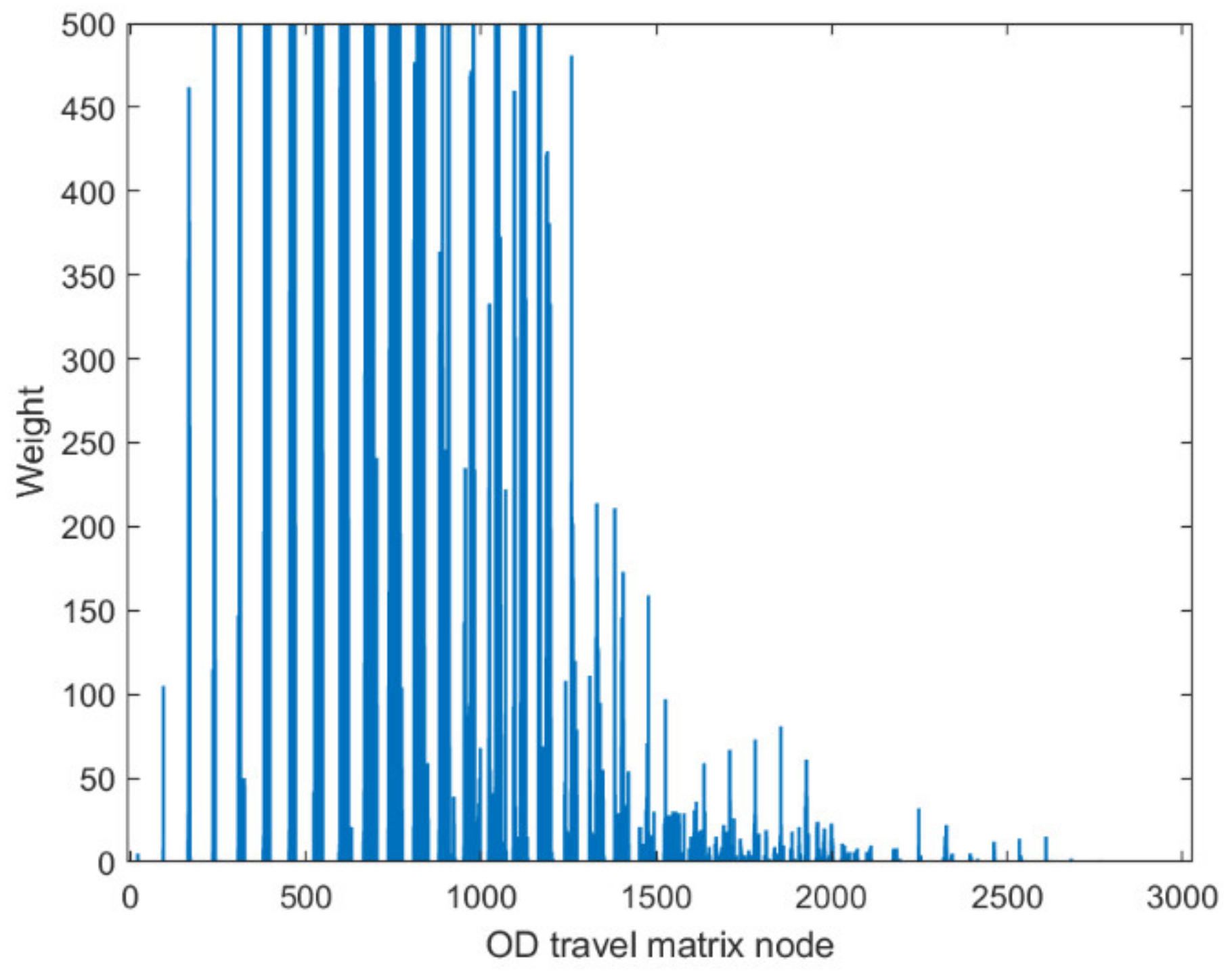
After the division of latitude and longitude, it can be seen that there are 3024 nodes in total. There are 11,328 OD pairs in total. The traffic volume between two nodes is calculated by:
where
is the starting point of a pair of OD pairs, and
is the end point of an OD pair.
is the number of paths from the starting point to the ending point.
is the traffic volume between two nodes.














































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}