1. Introduction
In recent years, expanding the range of information acquisition, improving the accuracy and reliability of reconnaissance systems, and improving the stability of target tracking and information have become a hot research field throughout radar networking [
1,
2]. The target tracking system is one of the cores of radar networking systems. It can provide reliable information support for decision-makers. According to the structure, it can be divided into centralized and distributed types [
3]. The centralized structure is to directly report the raw data received by the radar to the fusion center (FC) without processing, and then the FC uniformly processes and gives the estimated target’s state [
4,
5]. The result of this structure is accurate, but the calculation amount is large and the requirement for equipment is high. The other type is the distributed tracking system, in which each radar independently estimates the state of the target to generate track data and report it to the FC. Compared with the centralized structure, the distributed structure has become the preferred scheme for radar networking with the advantages of a low communication bandwidth requirement, low computation, and high destruction resistance [
6,
7].
For the distributed tracking system, due to the lack of information about radar overlapping and the number of targets in the FC, one of the core problems to be solved is to merge the duplicate tracks. The process of determining the duplicate tracks is called track-to-track association (TTTA) [
8,
9,
10,
11,
12].
In view of the problem of asynchronous and unequal rates of TTTA, different types of TTTA bearings have been developed in recent years, which can be roughly divided into: first, the traditional association is realized by establishing a motion model after time domain alignment. Singer and Kanyuck [
13] developed the first TTTA algorithm in 1970 to estimate two tracks from two different sensors based on the use of Gates. The work in [
14] extends the traditional nearest neighborhood method and K-nearest neighborhood method, and makes amendments and improvements in association criteria, quality design, and ambiguity processing, etc. The work in [
15] has suggested a new TTTA algorithm based on the well-known iterative closest point (ICP) and the global nearest neighbor (GNN). These algorithms do not consider the measurement biases of the radars, which exist in reality. The existence of radar bias leads to the poor performance of TTTA, so some scholars have proposed effective methods to solve the problem of TTTA and bias estimation. A joint approach for solving the problem of TTTA and sensor bias estimation is designed by Zhu and Wang [
16]. The work in [
17], according to the statistical characteristics of Gaussian random vectors, led to the design for an anti-bias TTTA technique for aircraft platforms. By the work in [
18], an algorithm for processing spatiotemporal bias and state estimation of asynchronous multi-sensor systems is proposed to obtain the enhanced state vector and establish the enhanced state model. Tian et al. stated a TTTA algorithm based on the reference topology (RET) feature [
19], which avoids estimating the relative bias. Zhu et al. proposed an expected maximization algorithm for finding the corresponding matrix between tracks through the probability method [
20]. However, most of these algorithms only consider the case of two sensors, while in the actual situation, for example, there are many radars in the radar networking system, and time domain alignment is required before association, resulting in accumulation and transmission of measurement bias, and ultimately affecting the effect of TTTA.
Due to different radar sampling periods and inconsistent startup times, the timing of track points reported by each radar received by the FC is asynchronous and at unequal rates [
21]. Moreover, it is difficult to establish the target motion model, which increases the difficulty of TTTA. In recent years, scholars have developed different types of TTTA methods to address the problem of the asynchronous and unequal rates in TTTA. The method proposed in the Literature [
22] bypasses the translation and distance deviation of sensors, but still needs to consider the time alignment of tracks between different sensors. Reference [
23] uses the obtained radar track and corresponding automatic identification system (AIS) track data, and a Gaussian distribution model is derived through probability distribution fitting. This algorithm requires AIS data that is not easy to implement and requires a large amount of computation. Reference [
24] develops a spatiotemporal method for correlation, but requires a large amount of data collection as a prerequisite. Reference [
25] proposed a track segment association method based on a bidirectional Holt-Winters prediction and fuzzy analysis, which can effectively solve the track association problem where the target label attributes change before and after track breakage. However, it is necessary to predict and supplement missing tracks.
The other is to avoid the time domain alignment and bias estimation, and establish the correlation matrix of tracks to directly associate tracks. In order to avoid time domain alignment, deviation estimation, and other situations, some scholars directly establish a correlation matrix for TTTA through tracks. In the Literature, ref. [
26] introduces grey theory [
27] into the algorithm and proposes a new TTTA algorithm. In the work of [
28], the original track points are replaced by the track sequence after the interval data and real data mixed sequence transformation, and then a TTTA algorithm based on this sequence similarity degree is proposed by using the maximum association criterion. However, the new bias introduced by this transformation will affect the correct TTTA. In the work of [
29], segmented sequence division rules are defined for TTTS, but a certain amount of data is required as the premise, so the effect of track association is greatly affected by the length of sampling time.
To solve these problems, this paper defines a new distance measurement between tracks. The shortest Euclidean distance between a single track point and a track coordinate data set is taken as the distance between a single point and a track coordinate data set. Then, grey correlation theory is used to obtain the track correlation degree between asynchronous tracks and establish the correlation matrix. Finally, the Jonker-Volgenant algorithm and classical allocation method are combined to realize TTTA. The aim of this work is to realize the TTTA of constant speed straight line and constant speed turning targets with certain system biases and noises, and verify the effectiveness and superiority of the algorithm from different simulation conditions, average correct association rate, number of wrong associations, and maximum number of wrong association batches.
The purpose of this paper is to design and implement the asynchronous unequal rate TTTA algorithm for three-coordinate network radar systems. Its main contributions are as follows:
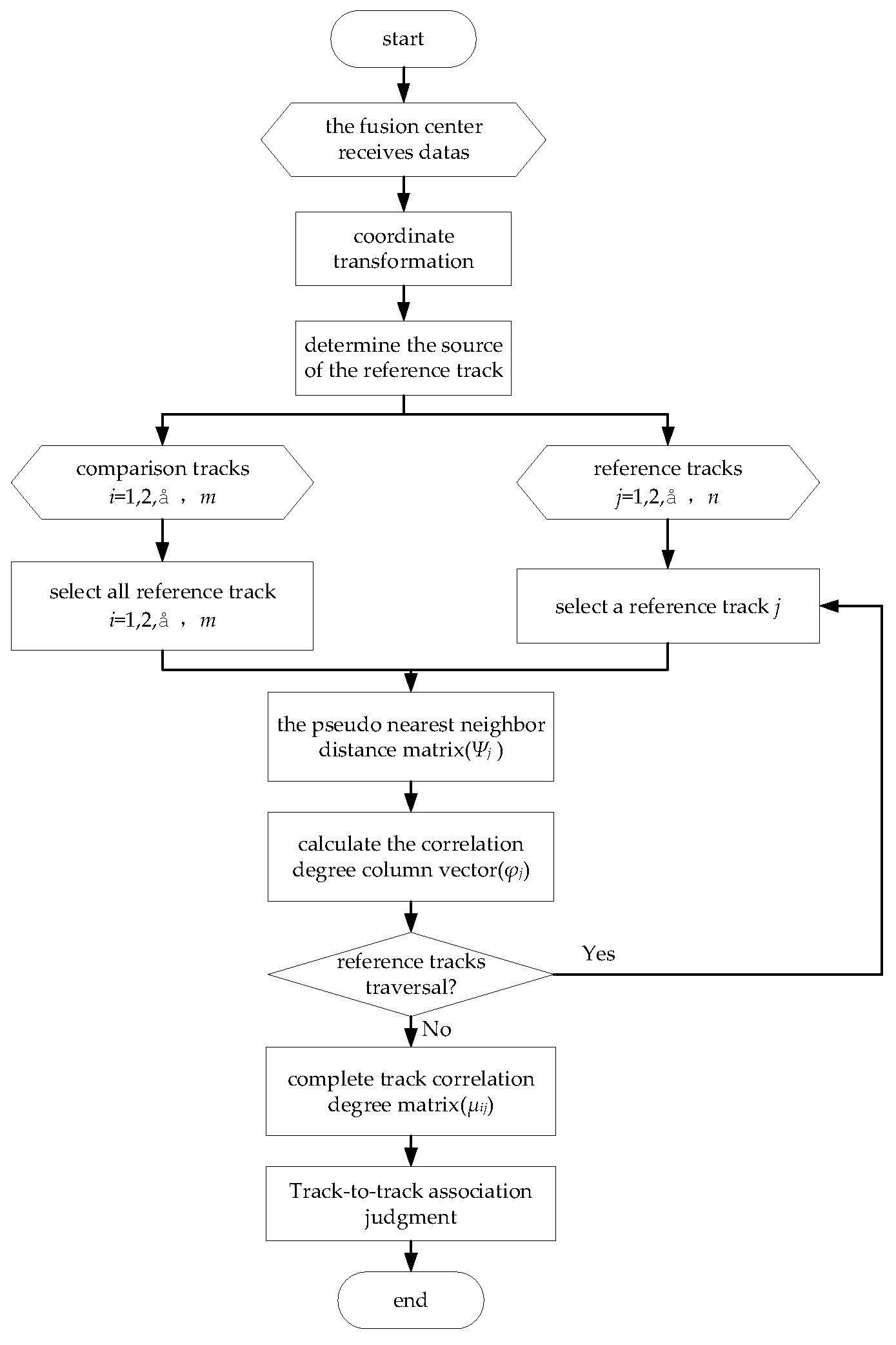
By defining the pseudo nearest neighbor distance between the coordinate points of the track and the track data set, the correlation degree between the tracks is established, and an asynchronous TTTA algorithm based on pseudo nearest neighbor distance is proposed. This algorithm does not need time domain alignment, reduces steps, effectively avoids introducing estimation bias, and directly associates the track data.
The average correct association rate of the tracks of the algorithm under different cycle ratios, different delay startup times, and different noise distribution forms is analyzed, and the anti-interference and effectiveness of the algorithm are proved.
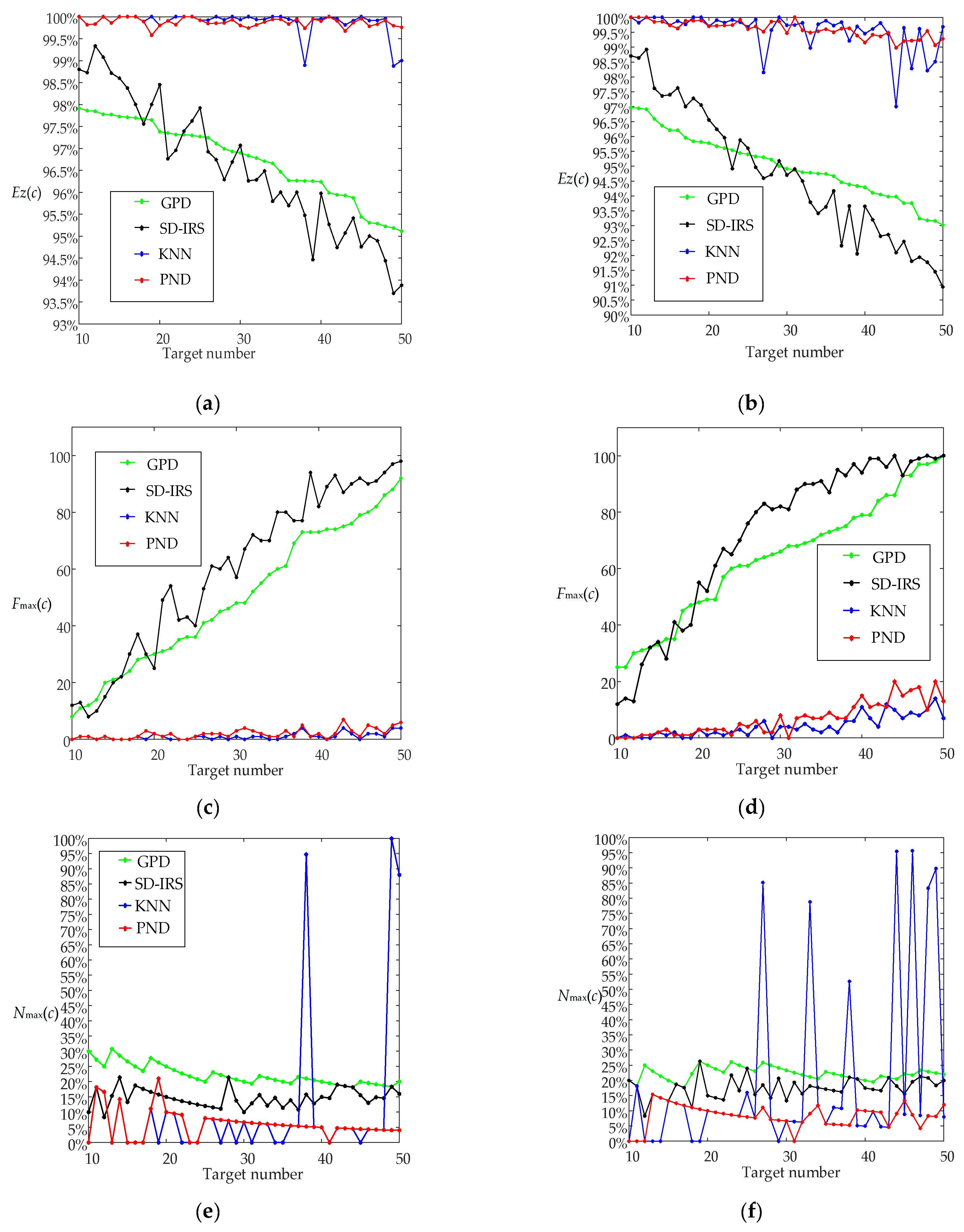
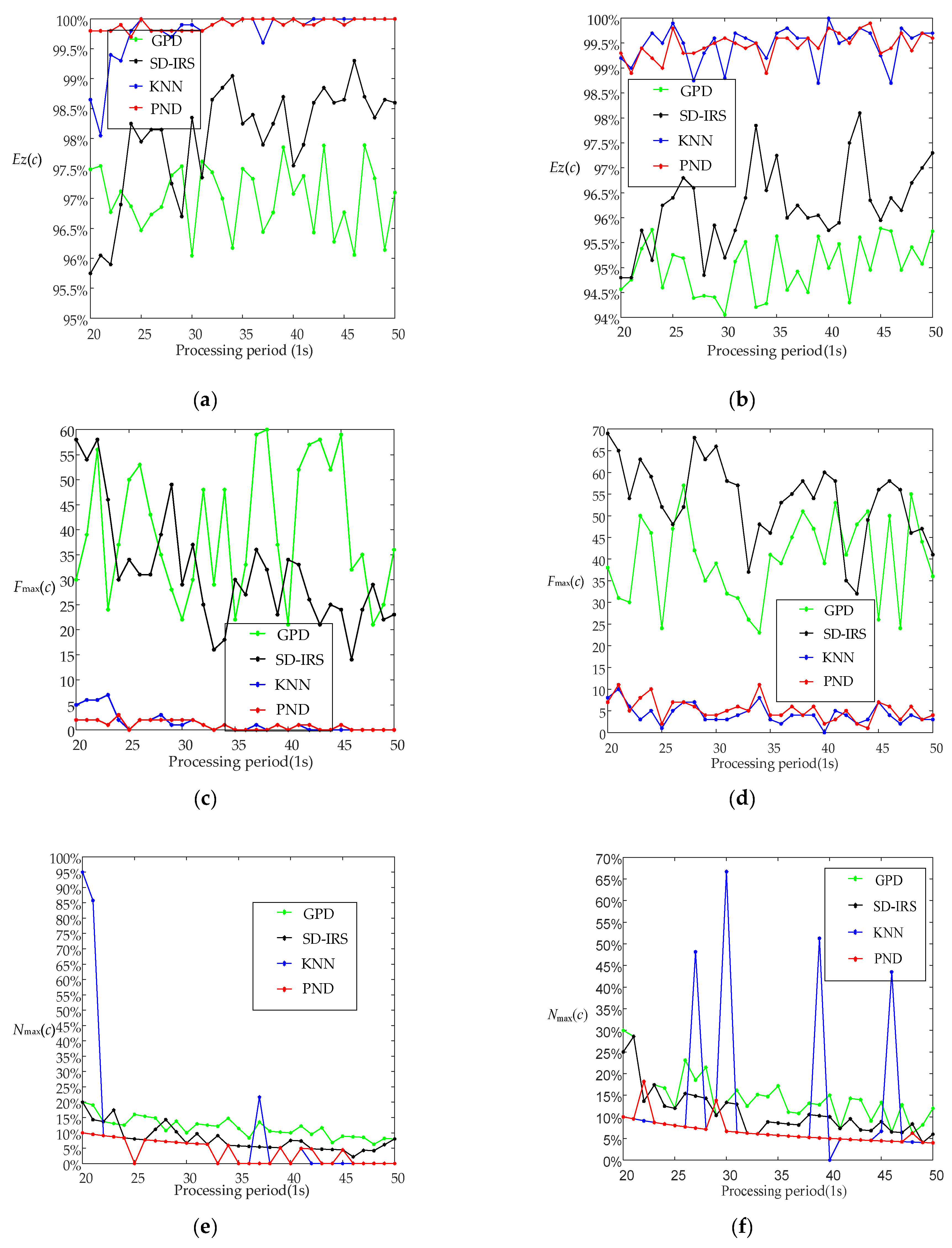
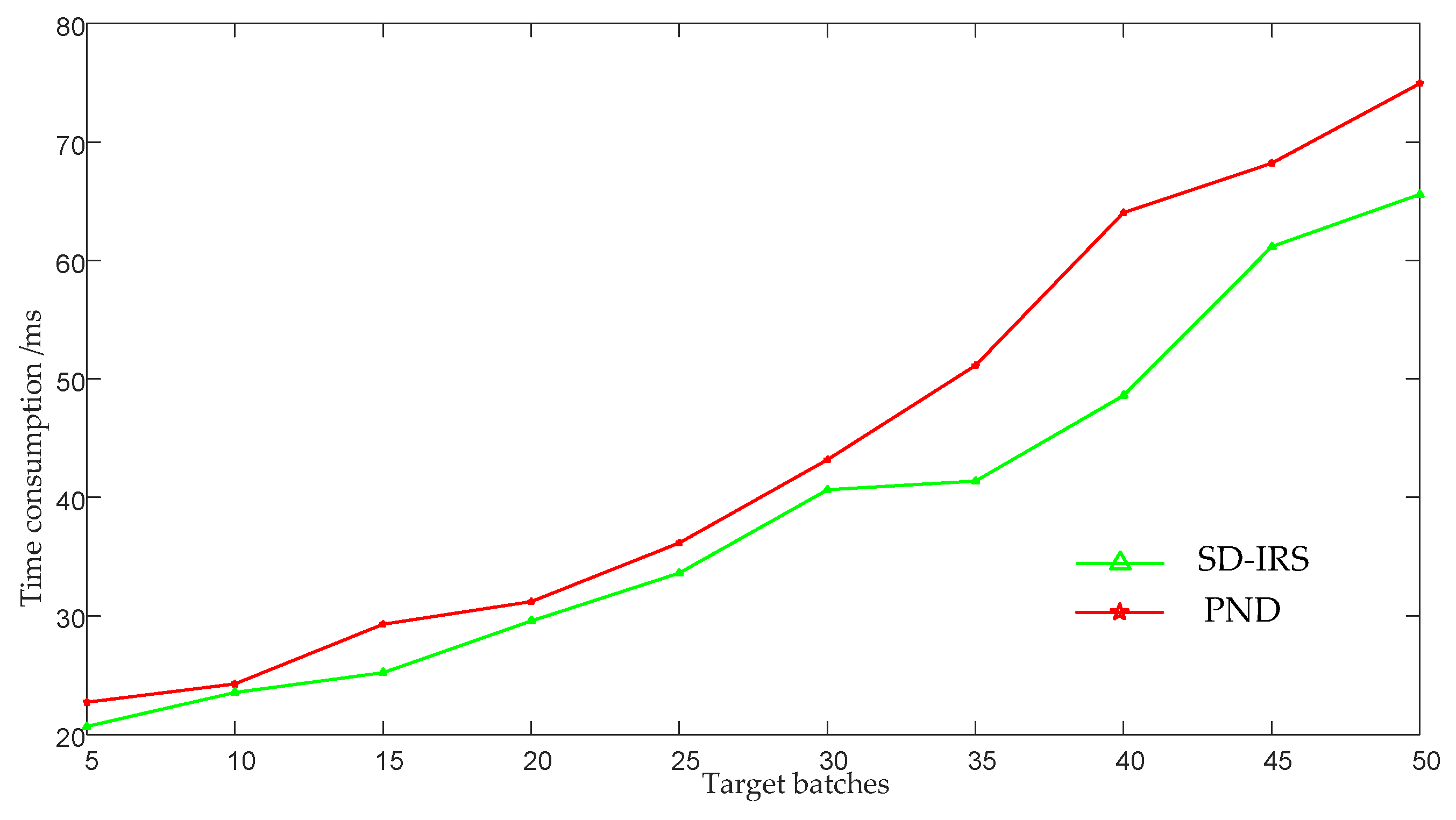
In different targets’ moving environments, by changing the simulation conditions of the number of target batches and processing periods, the number of false associations, the maximum false association rates, and the average correct association rate of various algorithms are compared, which proves that the proposed algorithm has strong robustness and superiority.
The main innovation of this paper is to derive and propose an asynchronous TTTA algorithm based on pseudo nearest neighbor distance. The structure of the article is as follows.
Section 2 defines the pseudo nearest neighbor distance and the degree of correlation between different tracks, and the asynchronous TTTA algorithm is derived in detail.
Section 3 carries out simulation experiments and analyzes the results according to performance evaluation indicators. Finally,
Section 4 provides conclusions.
4. Conclusions
In order to solve the problem of TTTA in the case of asynchronous unequal rates, this paper presents a rule for measuring the correlation degree between unequal length track data sets. The shortest Euclidean distance between track data sets and track points is used instead of the traditional calculation of the nearest neighbor distance between two track points at the same time. Additionally, the pseudo nearest neighbor distance between targets is directly calculated, and the correlation degree matrix between tracks is calculated using gray correlation theory, which reduces the computation amount and effectively avoids the estimation biases introduced by the time domain alignment. It has a high average correct association rate.
The algorithm does not need time domain alignment, and directly correlates the reported asynchronous unequal rate tracks. It can effectively solve the difficulty of TTTA caused by different sampling periods and inconsistent startup times of networked radars, and is not affected by processing periods and noise distribution forms. It also maintains a low and stable number of false associations, the maximum false association rate, and a high average correct association rate under different moving forms of targets, with good anti-noise, superiority, and robustness.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}