
Path Planning of Mecanum Wheel Chassis Based on Improved A* Algorithm

Abstract
:1. Introduction
2. Materials and Methods
2.1. Mobile Chassis Control System Framework Design
2.2. Mecanum Wheel Chassis Motion Model
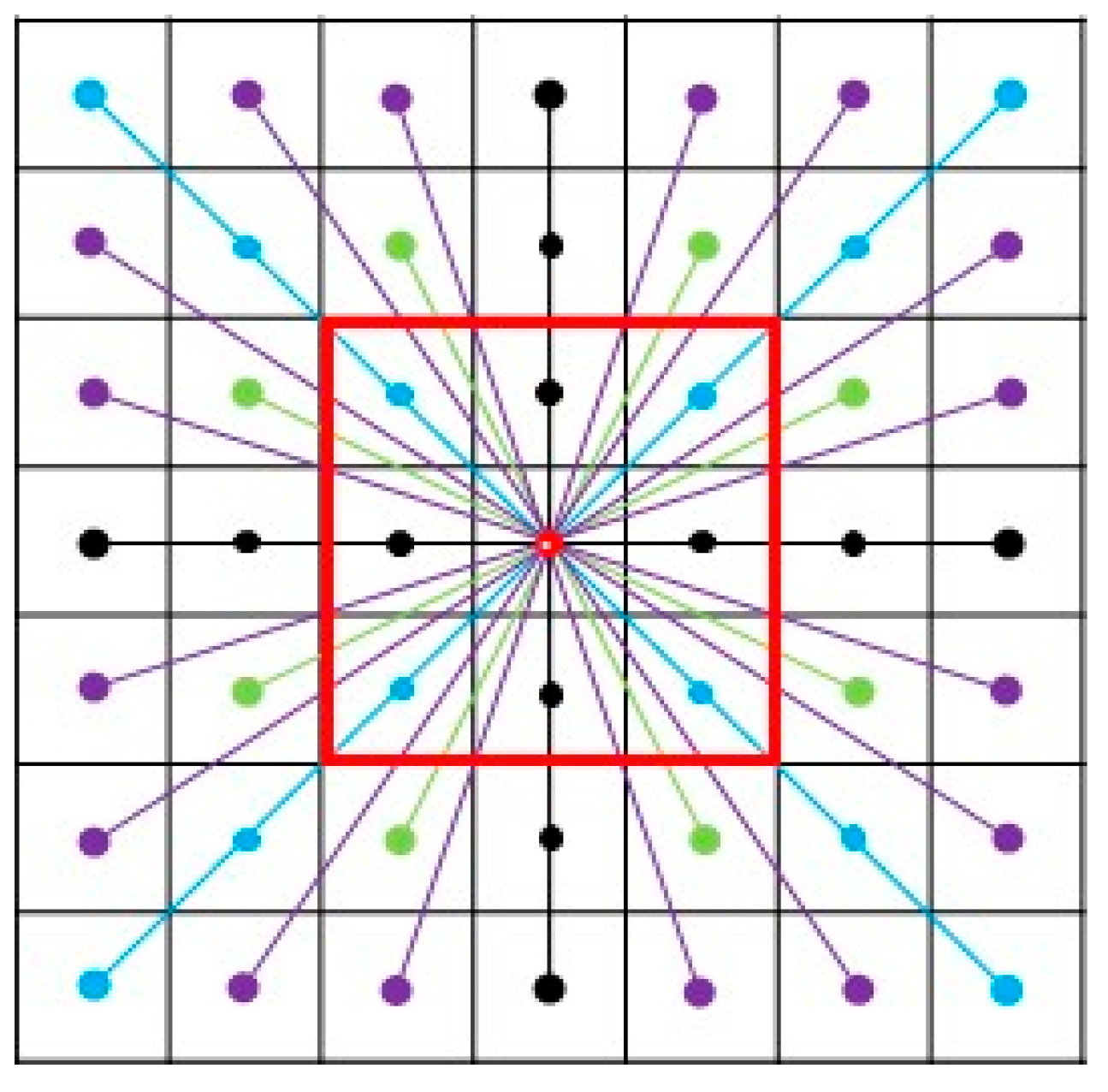
2.3. Improving the A* Algorithm
3. Results
3.1. Environment Map Construction and Simulation
3.2. Path Planning Simulation
3.3. Greenhouse Test
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Erke, S.; Bin, D.; Yiming, N.; Qi, Z.; Liang, X.; Dawei, Z. An improved A-Star based path planning algorithm for autonomous land vehicles. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420962263. [Google Scholar] [CrossRef]
- Tang, G.; Tang, C.; Claramunt, C.; Hu, X.; Zhou, P. Geometric A-star algorithm: An improved A-star algorithm for AGV path planning in a port environment. IEEE Access 2021, 9, 59196–59210. [Google Scholar] [CrossRef]
- Liang, C.; Zhang, X.; Watanabe, Y.; Deng, Y. Autonomous collision avoidance of unmanned surface vehicles based on improved A star and minimum course alteration algorithms. Appl. Ocean Res. 2021, 113, 102755. [Google Scholar] [CrossRef]
- Zuo, S.; Yongsheng, O.; Zhu, X. A path planning framework for indoor low-cost mobile robots. In Proceedings of the 2017 IEEE International Conference on Information and Automation, Macau, China, 18–20 July 2017. [Google Scholar]
- Masri, İ.; Erdal, E. An Intelligent Vision System to Navigate a Robot Without On-Board Sensors. In Proceedings of the 2019 4th International Conference on Computer Science and Engineering, Jinan, China, 18–21 September 2019. [Google Scholar]
- Matsuzaki, S.; Masuzawa, H.; Miura, J.; Oishi, S. 3D semantic mapping in greenhouses for agricultural mobile robots with robust object recognition using robots’ trajectory. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics, Miyazaki, Japan, 7–10 October 2018. [Google Scholar]
- Christy, A.; Raj, P.A.-D.; Padmanaban, S.; Selvamuthukumaran, R.; Ertas, A.H. A bio-inspired novel optimization technique for reactive power flow. Eng. Sci. Technol. Int. J. 2016, 19, 1682–1692. [Google Scholar] [CrossRef] [Green Version]
- Daya, F.J.L.; Sanjeevikumar, P.; Blaabjerg, F.; Wheeler, P.W.; Ojo, J.O.; Ertas, A.H. Analysis of wavelet controller for robustness in electronic differential of electric vehicles: An investigation and numerical developments. Electr. Power Compon. Syst. 2016, 44, 763–773. [Google Scholar] [CrossRef] [Green Version]
- Sundaram, E.; Gunasekaran, M.; Krishnan, R.; Padmanaban, S.; Chenniappan, S.; Ertas, A.H. Genetic algorithm based reference current control extraction based shunt active power filter. Int. Trans. Electr. Energy Syst. 2021, 31, e12623. [Google Scholar] [CrossRef]
- Hermand, E.; Nguyen, T.W.; Hosseinzadeh, M.; Garone, E. Constrained control of UAVs in geofencing applications. In Proceedings of the 2018 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018. [Google Scholar]
- Kim, J.; Atkins, E. Airspace Geofencing and Flight Planning for Low-Altitude, Urban, Small Unmanned Aircraft Systems. Appl. Sci. 2022, 12, 576. [Google Scholar] [CrossRef]
- Vagal, V.; Markantonakis, K.; Shepherd, C. A New Approach to Complex Dynamic Geofencing for Unmanned Aerial Vehicles. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021. [Google Scholar]
- Valera, Á.; Valero, F.; Vallés, M.; Besa, A.; Mata, V.; Llopis-Albert, C. Navigation of autonomous light vehicles using an optimal trajectory planning algorithm. Sustainability 2021, 13, 1233. [Google Scholar] [CrossRef]
- Kuswadi, S.; Santoso, J.W.; Tamara, M.N.; Nuh, M. Application SLAM and path planning using A-star algorithm for mobile robot in indoor disaster area. In Proceedings of the 2018 International Electronics Symposium on Engineering Technology and Applications, Bali, Indonesia, 29–30 October 2018. [Google Scholar]
- Yin, X.; Du, J.; Noguchi, N.; Yang, T.; Jin, C. Development of autonomous navigation system for rice transplanter. Int. J. Agric. Biol. Eng. 2018, 11, 89–94. [Google Scholar] [CrossRef] [Green Version]
- Yin, X.; Wang, Y.; Chen, Y.; Jin, C.; Du, J. Development of autonomous navigation controller for agricultural vehicles. Int. J. Agric. Biol. Eng. 2020, 13, 70–76. [Google Scholar] [CrossRef]
- Yao, L.; Hu, D.; Zhao, C.; Yang, Z.; Zhang, Z. Wireless positioning and path tracking for a mobile platform in greenhouse. Int. J. Agric. Biol. Eng. 2021, 14, 216–223. [Google Scholar] [CrossRef]
- Ohi, N.; Lassak, K.; Watson, R.; Strader, J.; Du, Y.; Yang, C.; Li, X.; Gu, Y. Design of an autonomous precision pollination robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Wang, X.; Chen, Q.; Yu, X. Research on Spectrum Prediction Technology Based on B-LTF. Electronics 2023, 12, 247. [Google Scholar] [CrossRef]
- Ganesan, R.; Raajini, X.M.; Nayyar, A.; Sanjeevikumar, P.; Hossain, E.; Ertas, A.H. Bold: Bio-inspired optimized leader election for multiple drones. Sensors 2020, 20, 3134. [Google Scholar] [CrossRef]
- De Mel, S.J.C.; Seneweera, S.; De Mel, R.K.; Medawala, M.; Abeysinghe, N.; Dangolla, A.; Allen, B.L. Virtual fencing of captive Asian elephants fitted with an aversive geofencing device to manage their movement. Appl. Anim. Behav. Sci. 2023, 258, 105822. [Google Scholar] [CrossRef]
- Liu, Z.; Lu, Z.; Zheng, W.; Zhang, W.; Cheng, X. Design of obstacle avoidance controller for agricultural tractor based on ROS. Int. J. Agric. Biol. Eng. 2019, 12, 58–65. [Google Scholar] [CrossRef]
- Liu, Z.; Zheng, W.; Wang, N.; Lyu, Z.; Zhang, W. Trajectory tracking control of agricultural vehicles based on disturbance test. Int. J. Agric. Biol. Eng. 2020, 13, 138–145. [Google Scholar] [CrossRef] [Green Version]
- Lu, E.; Xu, L.; Li, Y.; Tang, Z.; Ma, Z. Modeling of working environment and coverage path planning method of combine harvesters. Int. J. Agric. Biol. Eng. 2020, 13, 132–137. [Google Scholar] [CrossRef] [Green Version]
- Post, M.A.; Bianco, A.; Yan, X.T. Autonomous navigation with open software platform for field robots. In Proceedings of the Informatics in Control, Automation and Robotics 14th International Conference, ICINCO 2017, Madrid, Spain, 26–28 July 2017. [Google Scholar]
- Mahmud, M.S.A.; Abidin, M.S.Z.; Mohamed, Z.; Rahman, M.K.I.A.; Iida, M. Multi-objective path planner for an agricultural mobile robot in a virtual greenhouse environment. Comput. Electron. Agric. 2019, 157, 488–499. [Google Scholar] [CrossRef]
- Zangina, U.; Buyamin, S.; Abidin, M.S.Z.; Mahmud, M.S.A. Agricultural rout planning with variable rate pesticide application in a greenhouse environment. Alex. Eng. J. 2021, 60, 3007–3020. [Google Scholar] [CrossRef]
- Chaari, I.; Koubaa, A.; Bennaceur, H.; Ammar, A.; Alajlan, M.; Youssef, H. Design and performance analysis of global path planning techniques for autonomous mobile robots in grid environments. Int. J. Adv. Robot. Syst. 2017, 14, 1729881416663663. [Google Scholar] [CrossRef]
- Wenzheng, L.; Junjun, L.; Shunli, Y. An improved Dijkstra’s algorithm for shortest path planning on 2D grid maps. In Proceedings of the 2019 IEEE 9th International Conference on Electronics Information and Emergency Communication, Beijing, China, 12–14 July 2019. [Google Scholar]
- Choudhary, A.; Kobayashi, Y.; Arjonilla, F.J.; Nagasaka, S.; Koike, M. Evaluation of mapping and path planning for non-holonomic mobile robot navigation in narrow pathway for agricultural application. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII), Iwaki, Japan, 11–14 January 2021. [Google Scholar]
- Uyeh, D.D.; Ramlan, F.W.; Mallipeddi, R.; Park, T.; Woo, S.; Kim, J.; Kim, Y.; Ha, Y. Evolutionary greenhouse layout optimization for rapid and safe robot navigation. IEEE Access 2019, 7, 88472–88480. [Google Scholar] [CrossRef]
- Liu, Y.T.; Sun, R.Z.; Zhang, T.Y.; Zhang, X.N.; Li, L.; Shi, G.Q. Warehouse-oriented optimal path planning for autonomous mobile fire-fighting robots. Secur. Commun. Netw. 2020, 2020, 6371814. [Google Scholar] [CrossRef]
- Xiong, X.; Min, H.; Yu, Y.; Wang, P. Application improvement of A* algorithm in intelligent vehicle trajectory planning. Math. Biosci. Eng. 2021, 18, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Luo, M.; Hou, X.; Yang, J. Surface optimal path planning using an extended Dijkstra algorithm. IEEE Access 2020, 8, 147827–147838. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Y. ASL-DWA: An Improved A-Star Algorithm for Indoor Cleaning Robots. IEEE Access 2022, 10, 99498–99515. [Google Scholar] [CrossRef]
- Liu, L.; Wang, B.; Xu, H. Research on Path-Planning Algorithm Integrating Optimization A-Star Algorithm and Artificial Potential Field Method. Electronics 2022, 11, 3660. [Google Scholar] [CrossRef]
- Bai, Y.; Li, G.; Li, N. Motion Planning and Tracking Control of Autonomous Vehicle Based on Improved Algorithm. J. Adv. Transp. 2022, 2022, 1675736. [Google Scholar] [CrossRef]
- Hong, Z.; Sun, P.; Tong, X.; Pan, H.; Zhou, R.; Zhang, Y.; Han, Y.; Wang, J.; Yang, S.; Xu, L. Improved A-Star algorithm for long-distance off-road path planning using terrain data map. ISPRS Int. J. Geo-Inf. 2021, 10, 785. [Google Scholar] [CrossRef]
- Wang, P.; Liu, Y.; Yao, W.; Yu, Y. Improved A-star algorithm based on multivariate fusion heuristic function for autonomous driving path planning. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022. [Google Scholar] [CrossRef]
- Ou, Y.; Fan, Y.; Zhang, X.; Lin, Y.; Yang, W. Improved A* Path Planning Method Based on the Grid Map. Sensors 2022, 22, 6198. [Google Scholar] [CrossRef] [PubMed]
- Dang, C.V.; Ahn, H.; Lee, D.S.; Lee, S.C. Improved Analytic Expansions in Hybrid A-Star Path Planning for Non-Holonomic Robots. Appl. Sci. 2022, 12, 5999. [Google Scholar] [CrossRef]
- Farid, G.; Cocuzza, S.; Younas, T.; Razzaqi, A.A.; Wattoo, W.A.; Cannella, F.; Mo, H. Modified A-Star (A*) Approach to Plan the Motion of a Quadrotor UAV in Three-Dimensional Obstacle-Cluttered Environment. Appl. Sci. 2022, 12, 5791. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | Algorithm | Algorithm Process Time (s) | Path Planning Time (s) | Turning Point | Distance (m) |
|---|---|---|---|---|---|
| (a) | Dijkstra | 1.332 | 45.94 | 5 | 20.47 |
| (b) | Floyd | 1.456 | 41.79 | 4 | 18.39 |
| (c) | 8-search-neighborhood A* | 1.364 | 42.42 | 4 | 18.83 |
| (d) | 24-search-neighborhood A* | 1.563 | 40.14 | 3 | 17.71 |
| (e) | 48-search-neighborhood A* | 2.879 | 36.43 | 2 | 16.65 |
| (f) | 48-search-neighborhood A*+Floyd | 3.715 | 33.91 | 2 | 15.76 |
| Order | Algorithm | Path Planning Time (s) | Distance (m) |
|---|---|---|---|
| (a) | Dijkstra | 114.85 | 21.30 |
| (b) | Floyd | 108.65 | 20.78 |
| (c) | 8-search-neighborhood A* | 110.29 | 21.28 |
| (d) | 24-search-neighborhood A* | 109.18 | 20.54 |
| (e) | 48-search-neighborhood A* | 99.20 | 19.14 |
| (f) | 48-search-neighborhood A*+Floyd | 95.37 | 18.31 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Yu, G.; Wang, Y.; Zhao, X.; Chen, Y.; Liu, J. Path Planning of Mecanum Wheel Chassis Based on Improved A* Algorithm. Electronics 2023, 12, 1754. https://doi.org/10.3390/electronics12081754
Xu H, Yu G, Wang Y, Zhao X, Chen Y, Liu J. Path Planning of Mecanum Wheel Chassis Based on Improved A* Algorithm. Electronics. 2023; 12(8):1754. https://doi.org/10.3390/electronics12081754
Chicago/Turabian StyleXu, Huimin, Gaohong Yu, Yimiao Wang, Xiong Zhao, Yijin Chen, and Jiangang Liu. 2023. "Path Planning of Mecanum Wheel Chassis Based on Improved A* Algorithm" Electronics 12, no. 8: 1754. https://doi.org/10.3390/electronics12081754