

Energy-Constrained UAV Data Acquisition in Wireless Sensor Networks with the Age of Information
Abstract
:
1. Introduction
1.1. Background
1.2. Related Work
- (a)
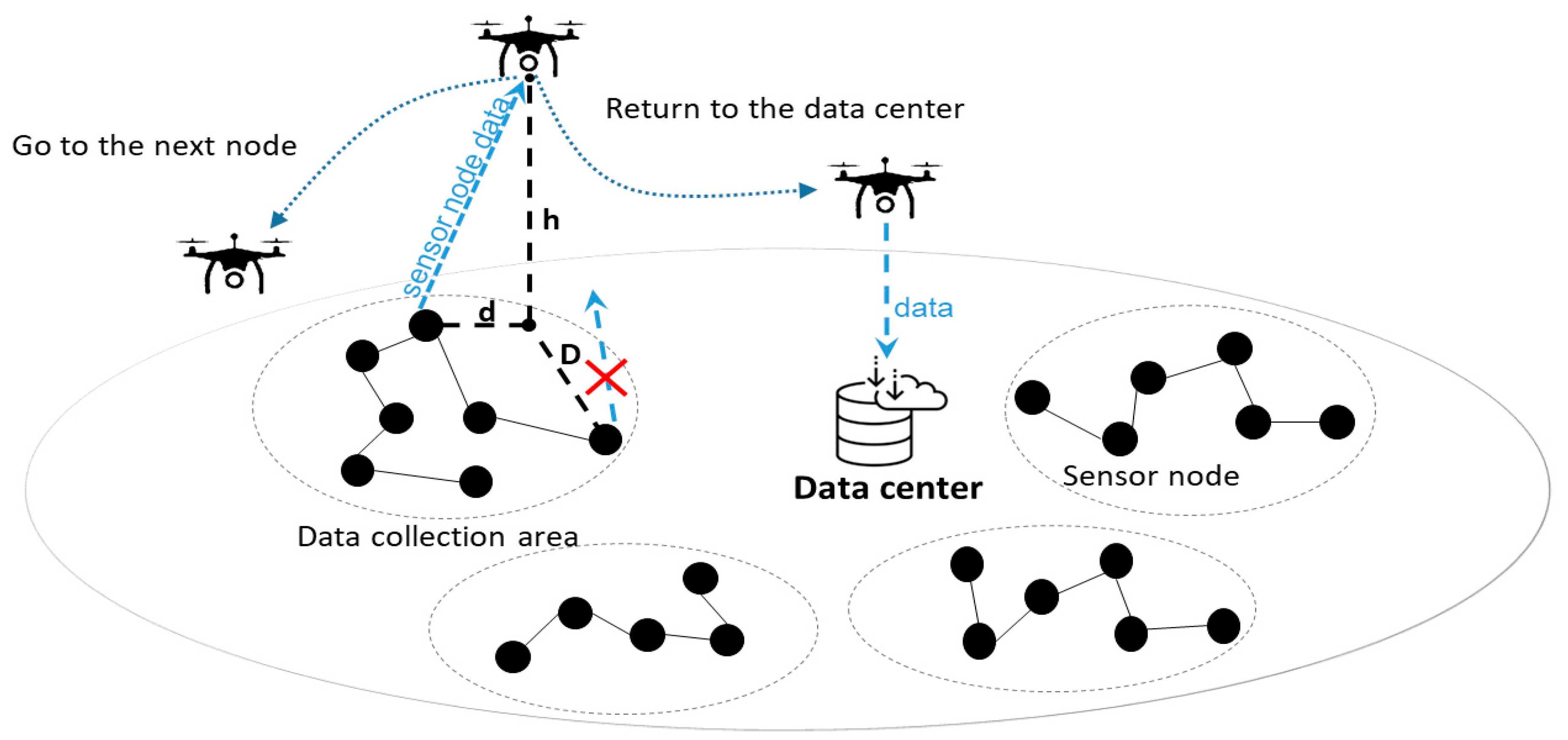
- Under the energy constraint of the UAV, we studied how to plan its flight path to achieve the best transmission effect, which was achieved by minimizing the information age of a single node and the information age of the entire network node.
- (b)
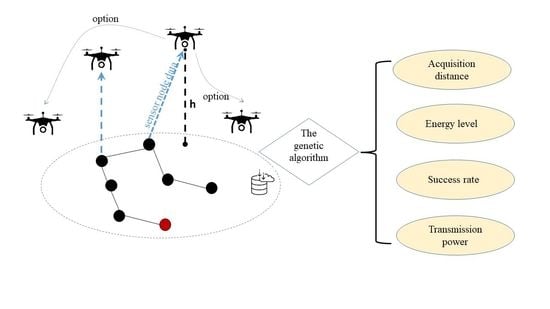
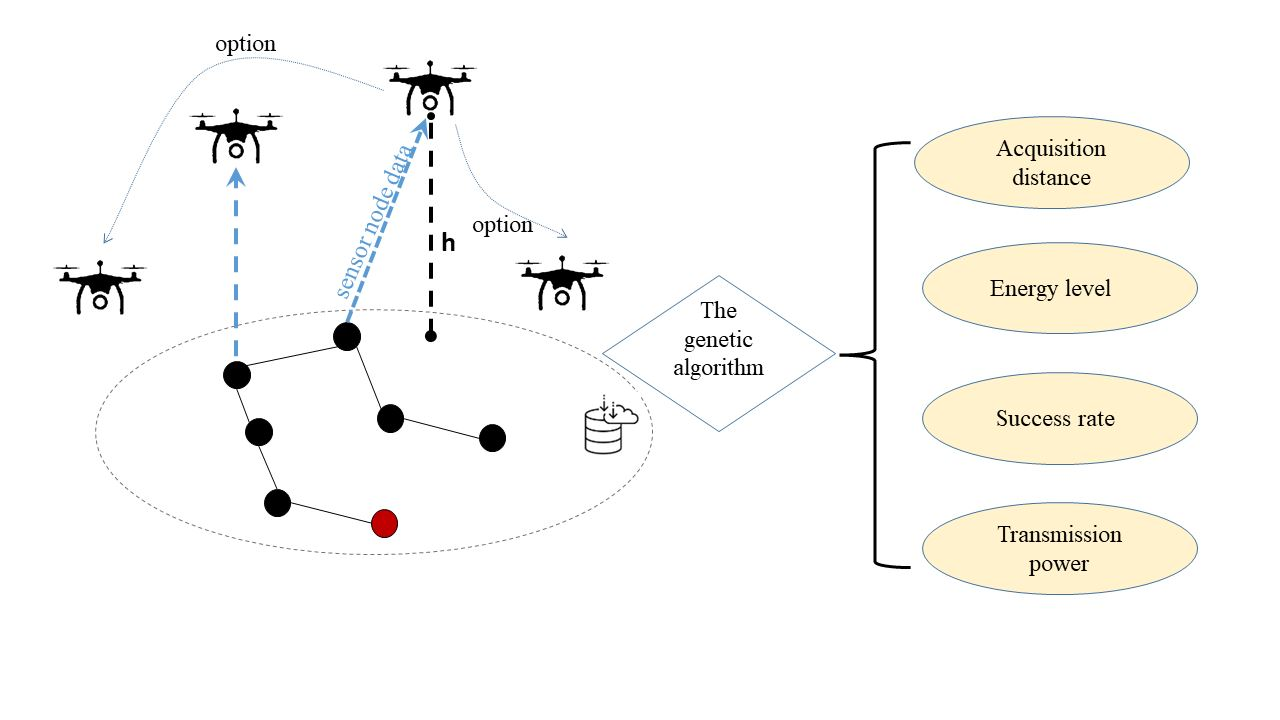
- We used a genetic algorithm to plan the flight path of the UAV. In the process of UAV flight path planning, each path from the starting point to the end point was represented as an individual in the genetic algorithm, and each path contained in it was represented as a chromosome.
- (c)
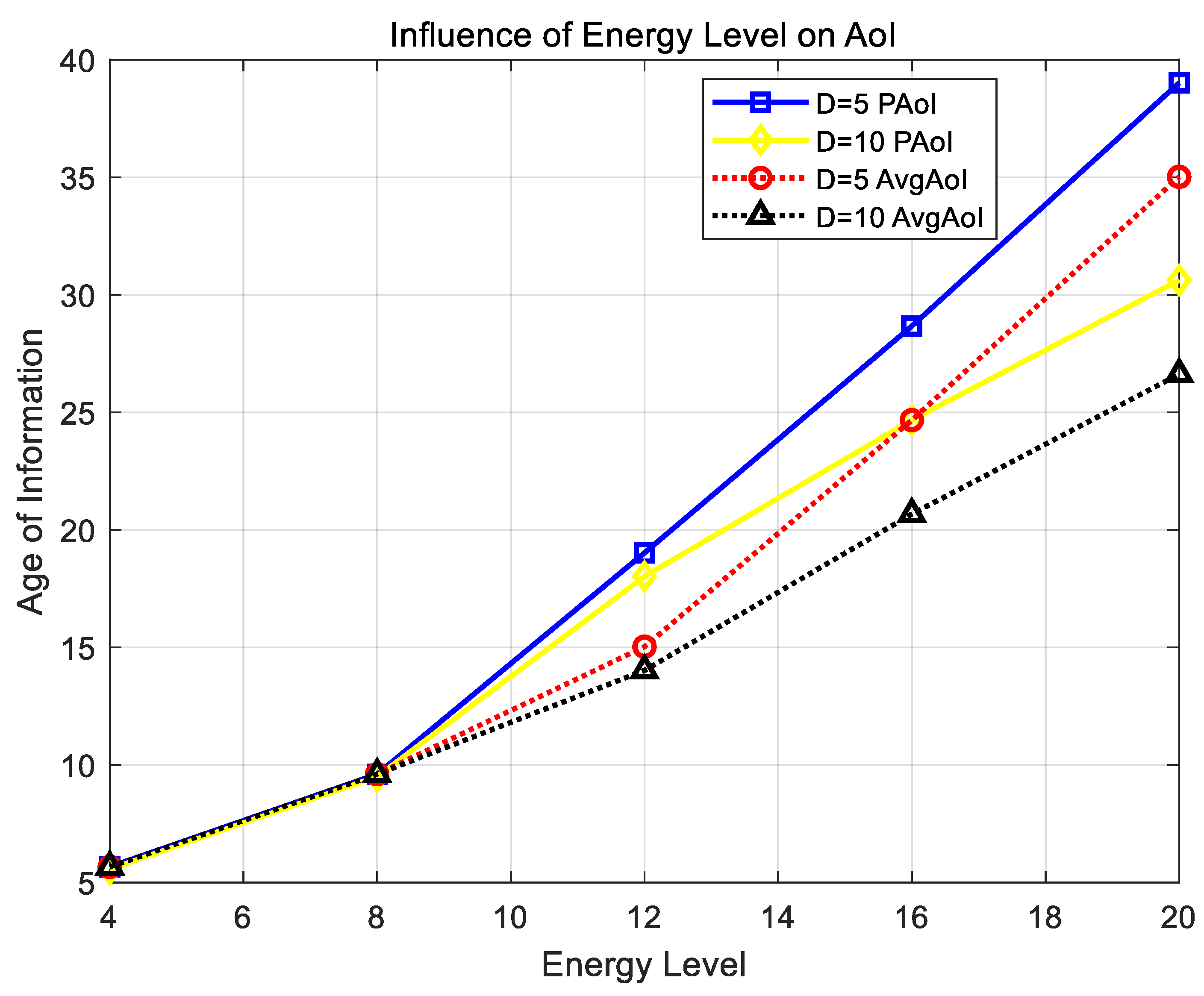
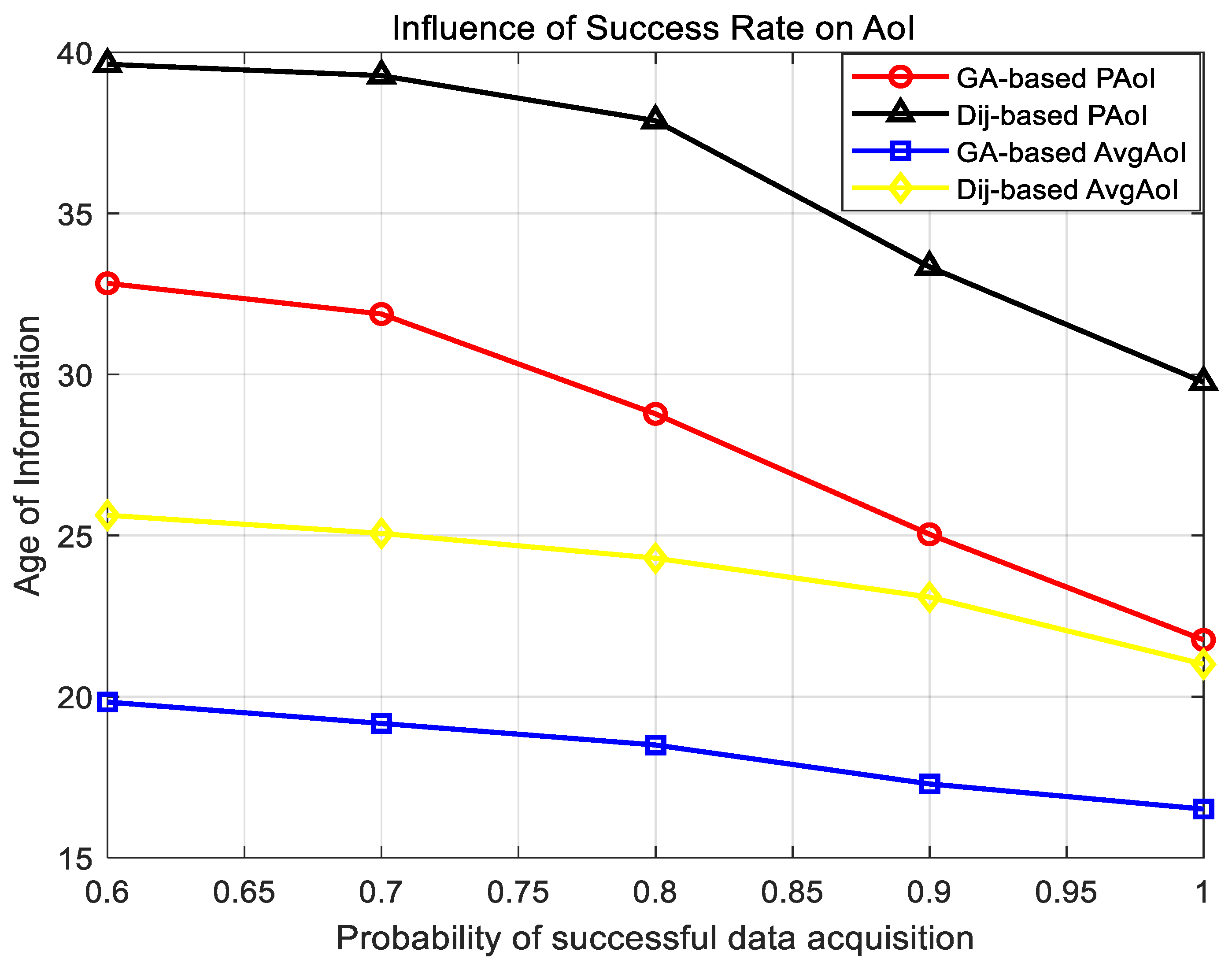
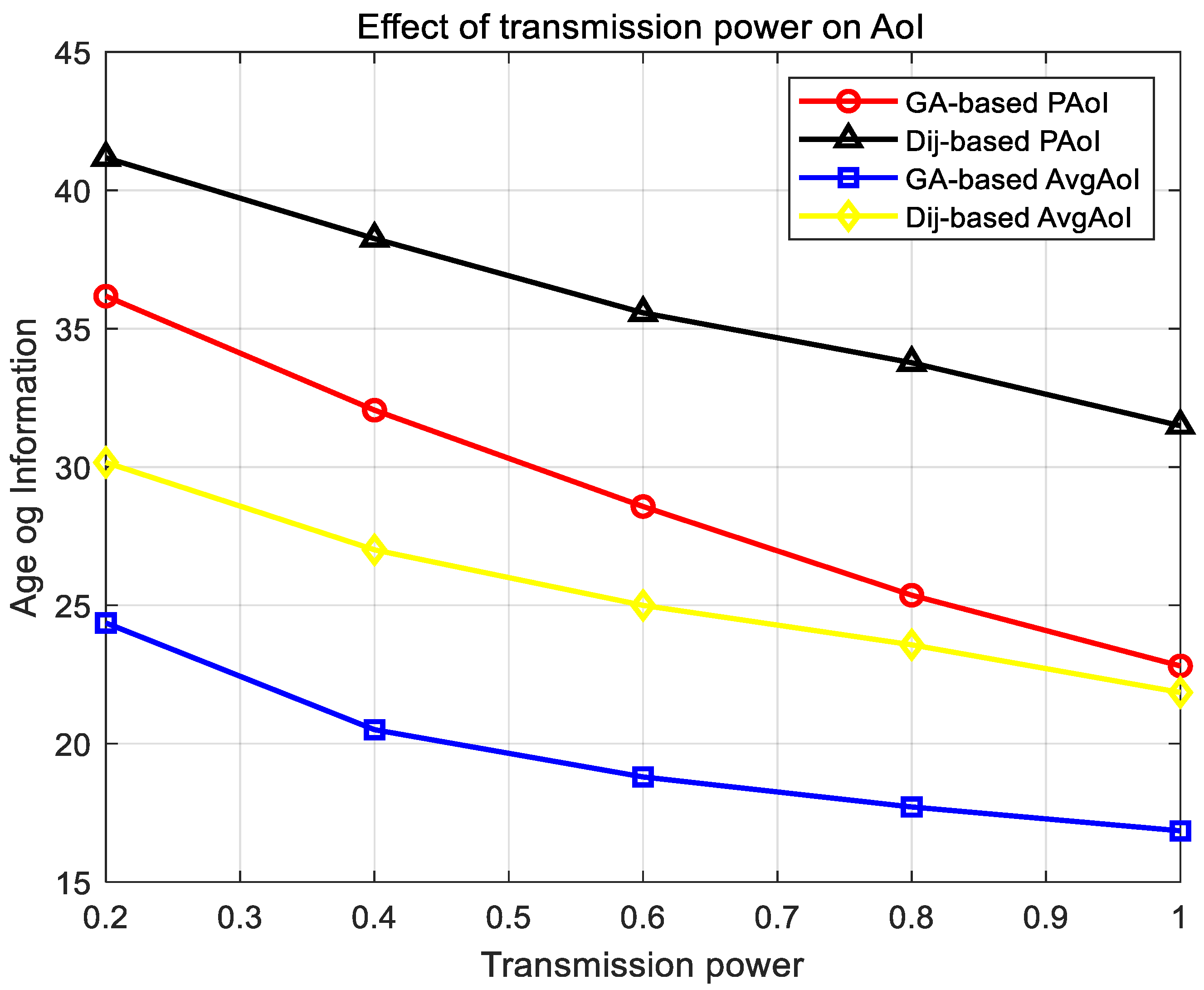
- We primarily analyzed and calculated the AoI of the ground sensor node data collected by the UAV based on the planned flight path as a reference for network performance. We considered the peak AoI of a single sensor node and the average AoI of the entire wireless sensor network under different acquisition success rates, acquisition distances, and transmission powers.
2. System Model
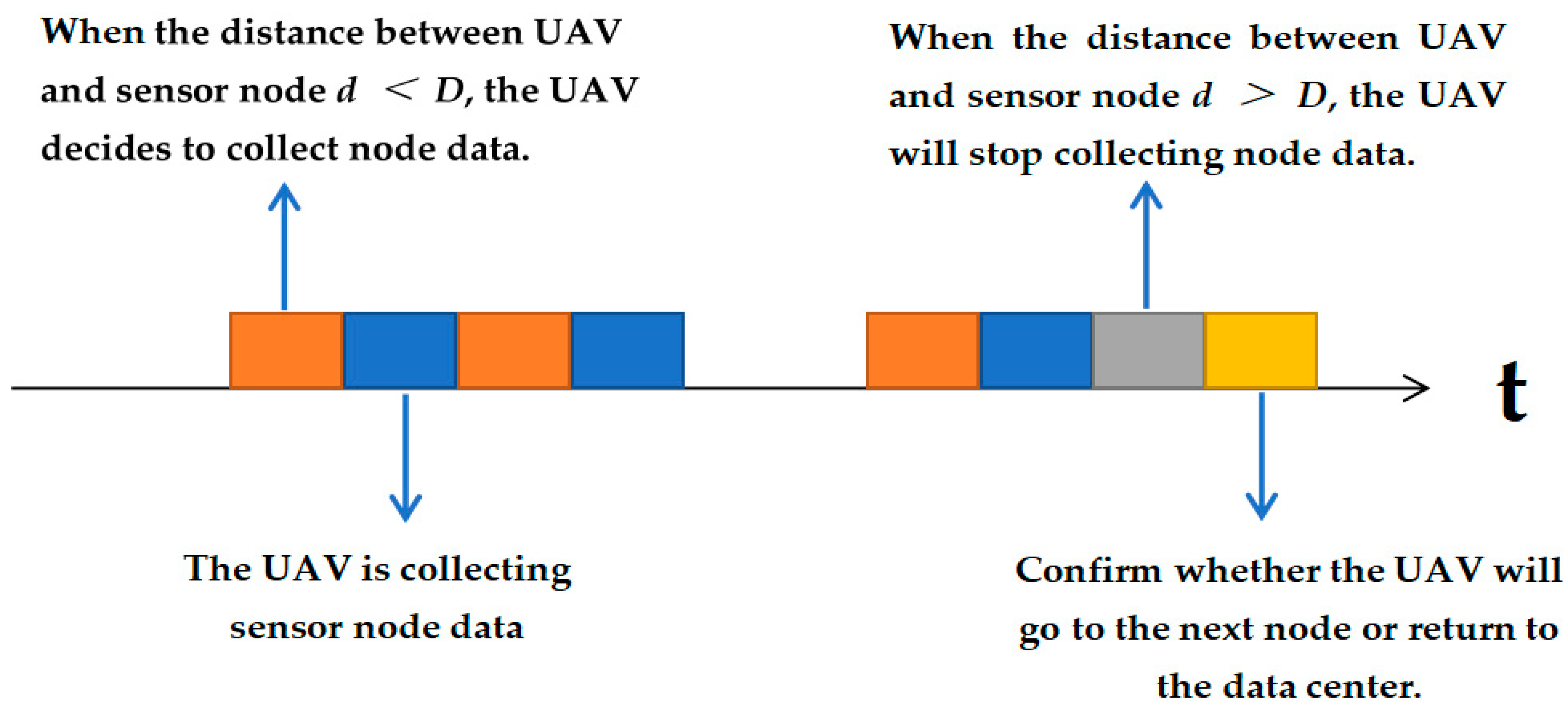
2.1. Data Collection Model
2.2. Energy Consumption Model
2.3. UAV Trajectory Optimization
3. The UAV Flight Algorithm and AoI Analysis
3.1. The UAV Genetic Algorithm
3.1.1. Initialize the Population
3.1.2. Individual Fitness Calculation
| Algorithm 1: UAV flight trajectory and fitness calculation |
| Initialize fitness matrix G and trajectory matrix Rm Initialize UAV energy E = Ei for k = 1, M do Initialize Total distance of UAV D = 0 Initialize Number of acquisition nodes n = 0 Initialize Rm represents the trajectory of the UAV Rm. append(τm,0) While True do If n == 0 do E0,I = μL0,i, d = L0,i else do Ei−1,I = μLi−1,i if Ei > E + μL0,i do E = Ei − E0,i, S = S + d Rm. append(τm,i) i = I + 1, n = 1 else do D = D + Li−1,i, n = 0 Rm. append(τm,0) G. append(-S) Return F, Tr |
3.1.3. Crossover and Variation
3.1.4. Delete
3.1.5. Select Elite Individuals
3.2. AoI Analysis
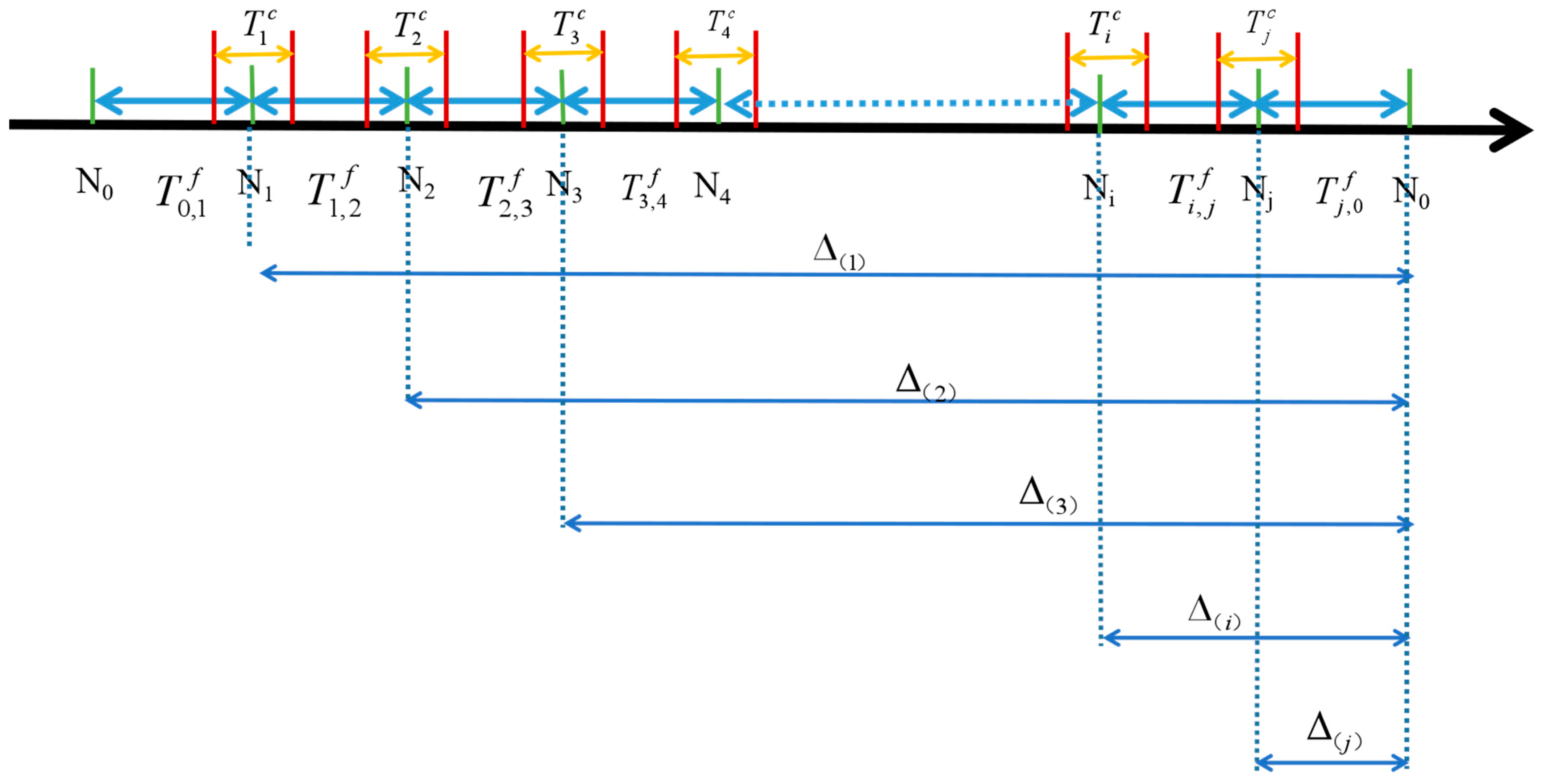
3.2.1. AoI Expression Calculation
3.2.2. AoI for a Single Sensor Node
3.2.3. AoI in the Wireless Sensor Network
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nguyen, M.T.; Nguyen, C.V.; Do, H.T.; Hua, H.T.; Tran, T.A.; Nguyen, A.D.; Ala, G.; Viola, F. UAV-Assisted Data Collection in Wireless Sensor Networks: A Comprehensive Survey. Electronics 2021, 10, 2603. [Google Scholar] [CrossRef]
- Yates, R.D.; Sun, Y.; Brown, D.R.; Kaul, S.K.; Modiano, E.; Ulukus, S. Age of Information: An Introduction and Survey. IEEE J. Sel. Areas Commun. 2021, 39, 1183–1210. [Google Scholar] [CrossRef]
- Zhang, S.; Cao, R.; Jiang, Z. Energy-Efficient Data Collection and Trajectory Design for UAV-Enabled Wireless Sensor Network. In Proceedings of the 2022 IEEE 5th International Conference on Electronics Technology (ICET), Chengdu, China, 13–16 May 2022; pp. 933–938. [Google Scholar] [CrossRef]
- Gao, N.; Zeng, Y.; Wang, J.; Wu, D.; Zhang, C.; Song, Q.; Qian, J.; Jin, S. Energy model for UAV communications: Experimental validation and model generalization. China Commun. 2021, 18, 253–264. [Google Scholar] [CrossRef]
- Yang, H. Secure energy efficiency maximization for dual-UAV-assisted intelligent reflecting surface system. Phys. Commun. 2022, 52, 101622. [Google Scholar] [CrossRef]
- Cao, A.; Shen, C.; Zong, J.; Chang, T.-H. Peak Age-of-Information Minimization of UAV-Aided Relay Transmission. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020. [Google Scholar]
- Abd-Elmagid, M.A.; Ferdowsi, A.; Dhillon, H.S.; Saad, W. Deep Reinforcement Learning for Minimizing Age-of-Information in UAV-Assisted Networks. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; Xu, J.; Chen, J.; Huang, J. UAV Trajectory Planning with Network Age of Information Minimization. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 1862–1867. [Google Scholar] [CrossRef]
- Tong, P.; Liu, J.; Wang, X.; Bai, B.; Dai, H. UAV-Enabled Age-Optimal Data Collection in Wireless Sensor Networks. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Jia, Z.; Qin, X.; Wang, Z.; Liu, B. Age-Based Path Planning and Data Acquisition in UAV-Assisted IoT Networks. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Zhong, R.; Liu, X.; Liu, Y.; Chen, Y. Multi-Agent Reinforcement Learning in NOMA-Aided UAV Networks for Cellular Offloading. IEEE Trans. Wirel. Commun. 2022, 21, 1498–1512. [Google Scholar] [CrossRef]
- Gao, X.; Zhu, X.; Zhai, L. AoI-Sensitive Data Collection in Multi-UAV-Assisted Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2023, 1. [Google Scholar] [CrossRef]
- Liu, C.; Guo, Y.; Li, N.; Song, X. AoI-Minimal Task Assignment and Trajectory Optimization in Multi-UAV-Assisted IoT Networks. IEEE Internet Things J. 2022, 9, 21777–21791. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Bai, B.; Dai, H. Age-optimal trajectory planning for UAV-assisted data collection. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 553–558. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Zhang, H.; Di, B.; Song, L. Cellular UAV-to-X Communications: Design and Optimization for Multi-UAV Networks. IEEE Trans. Wirel. Commun. 2019, 18, 1346–1359. [Google Scholar] [CrossRef] [Green Version]
- Goyal, S.; Gupta, R. Optimization of Fidelity with Adaptive Genetic Watermarking Algorithm Using Roulette-Wheel. In Proceedings of the 2010 International Conference on Computational Intelligence and Communication Networks, Bhopal, India, 26–28 November 2010; pp. 591–596. [Google Scholar] [CrossRef]
- Yu, F.; Fu, X.; Li, H.; Dong, G. Improved Roulette Wheel Selection-Based Genetic Algorithm for TSP. In Proceedings of the 2016 International Conference on Network and Information Systems for Computers (ICNISC), Wuhan, China, 15–17 April 2016; pp. 151–154. [Google Scholar] [CrossRef]
- Croitoru, N.-E. High Probability Mutation and Error Thresholds in Genetic Algorithms. In Proceedings of the 2015 17th International Symposium on Symbolic and Numeric Algorithms for Scientific Computing (SYNASC), Timisoara, Romania, 21–24 September 2015; pp. 271–276. [Google Scholar] [CrossRef]
- Cheng, W.; Shi, H.; Yin, X.; Li, D. An Elitism Strategy Based Genetic Algorithm for Streaming Pattern Discovery in Wireless Sensor Networks. IEEE Commun. Lett. 2011, 15, 419–421. [Google Scholar] [CrossRef]
- Bhateja, A.; Kumar, S. Genetic Algorithm with elitism for cryptanalysis of Vigenere cipher. In Proceedings of the 2014 International Conference on Issues and Challenges in Intelligent Computing Techniques (ICICT), Ghaziabad, India, 7–8 February 2014; pp. 373–377. [Google Scholar] [CrossRef]
- Economou, J.T.; Kladis, G.; Tsourdos, A.; White, B.A. UAV optimum energy assignment using Dijkstra’s Algorithm. In Proceedings of the 2007 European Control Conference (ECC), Kos, Greece, 2–5 July 2007; pp. 287–292. [Google Scholar] [CrossRef]
- Fan, D.; Shi, P. Improvement of Dijkstra’s algorithm and its application in route planning. In Proceedings of the 2010 Seventh International Conference on Fuzzy Systems and Knowledge Discovery, Yantai, China, 10–12 August 2010; pp. 1901–1904. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Fixed flying altitude h | 100 m |
| Bandwidth B | 1 MHz |
| Channel gain at a reference distance of 1 m | −60 dB |
| The power of channel noise | −100 dBm |
| The duration of each slot t | 1 s |
| The UAV speed during flight time | 10 m/s |
| The UAV speed during hover time | 2 m/s |
| The UAV data acquisition distance D | 5 m, 10 m |
| The data collection success rate G | [0.6, 1] |
| The transmission power P | [0, 1] W |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, J.; Li, Z.; Li, H.; Tang, L.; Zhong, S. Energy-Constrained UAV Data Acquisition in Wireless Sensor Networks with the Age of Information. Electronics 2023, 12, 1739. https://doi.org/10.3390/electronics12071739
Xiong J, Li Z, Li H, Tang L, Zhong S. Energy-Constrained UAV Data Acquisition in Wireless Sensor Networks with the Age of Information. Electronics. 2023; 12(7):1739. https://doi.org/10.3390/electronics12071739
Chicago/Turabian StyleXiong, Jinxuan, Zhimin Li, Hongzhi Li, Lin Tang, and Shaohong Zhong. 2023. "Energy-Constrained UAV Data Acquisition in Wireless Sensor Networks with the Age of Information" Electronics 12, no. 7: 1739. https://doi.org/10.3390/electronics12071739