
Research on Improved Multi-Channel Image Stitching Technology Based on Fast Algorithms

Abstract
:1. Introduction
- In the registration stage, the accuracy of registration was improved based on the Brisk + GMS fast image registration algorithm. In this stage, the gridded BRISK method was used to improve the efficiency of feature point matching, and the bidirectional matching GMS algorithm was used to improve the accuracy of feature point matching.
- In the fusing stage, the stitching effect was improved based on the seamline and weighted average fusion algorithm. In this stage, the image was fused, including the determination of the stitching area and image blending, to obtain a panoramic image. Firstly, the best seam line method was used to obtain the stitching seam, and then different blending regions were constructed. The weighted average algorithm was used to blend the stitching, transition, and extension regions, resulting in a high-quality and smooth stitching image.
2. Related Work
- The first step is identifying and describing the two images’ feature points.
- Next, the feature point sets are matched, and the transformation parameters are calculated based on the successful matching pairs.
- Finally, the parameters are applied to achieve image alignment.
2.1. Image Registration
2.2. Image Fusion
3. Proposed Image Stitching Method
3.1. Improved Gridded BRISK Algorithm
3.2. Bidirectional Matching Strategy Based on GMS Algorithm
3.3. Weighted Image Fusion Algorithm Based on Optimal Seam Line
4. Experimental Results
4.1. Image Registration Result Analysis
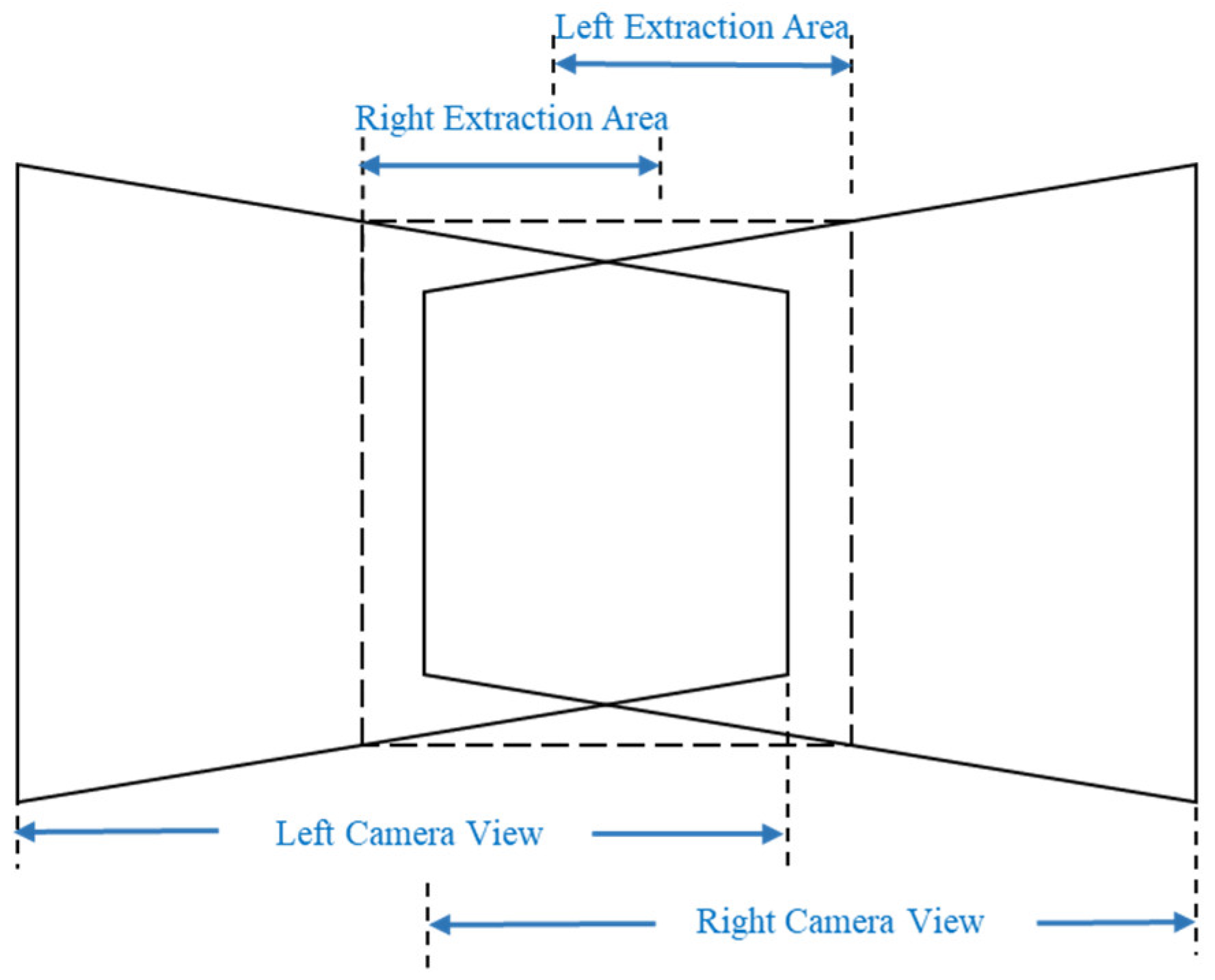
4.1.1. Improved Gridded BRISK Algorithm with Area Restriction
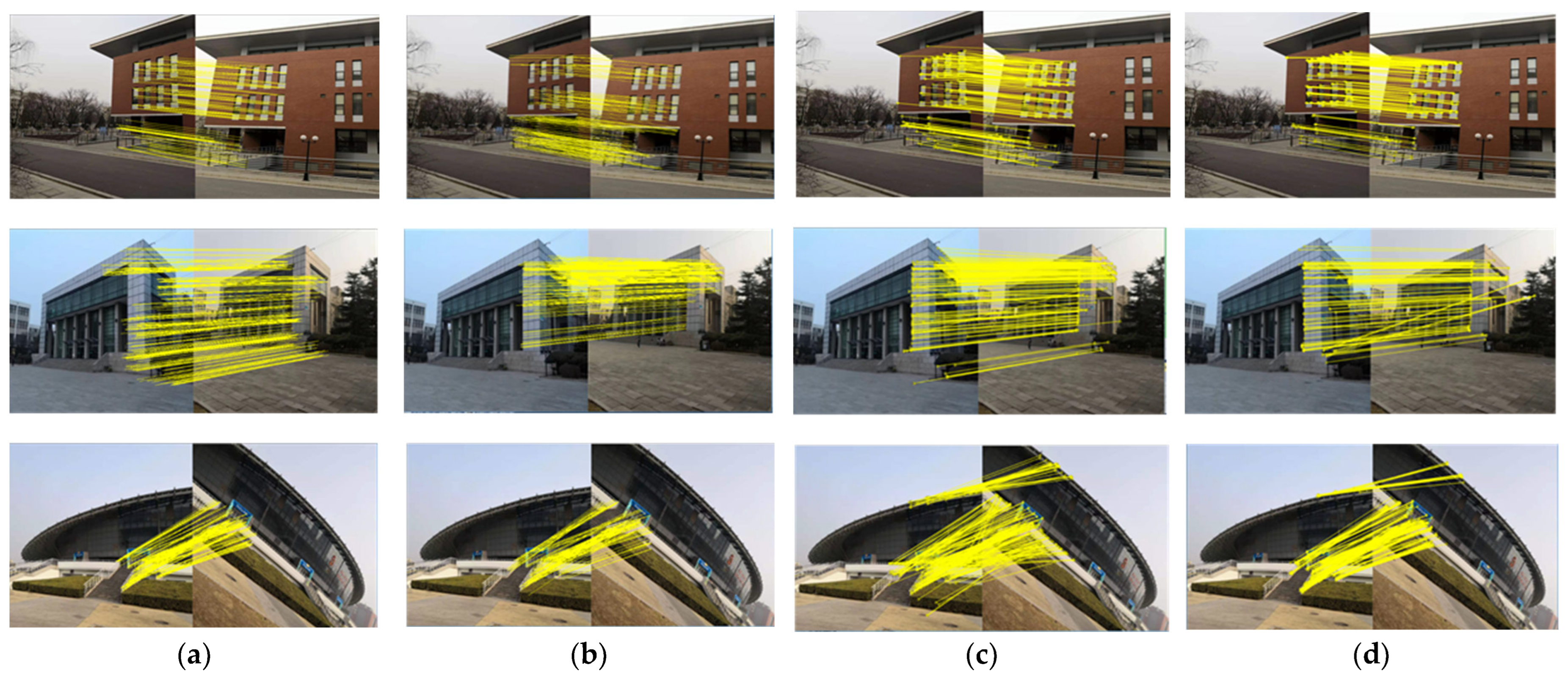
4.1.2. Image Registration Result Comparison
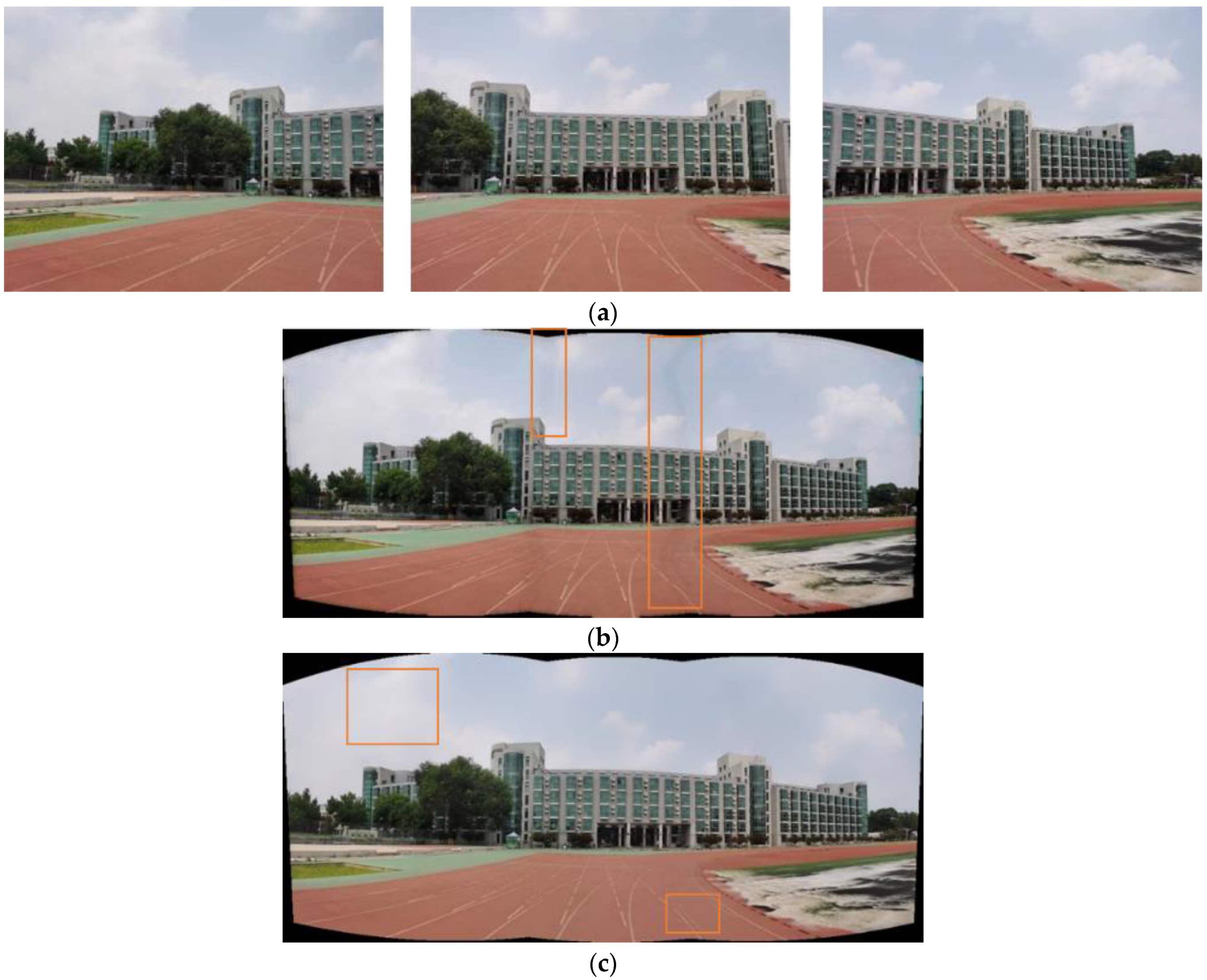
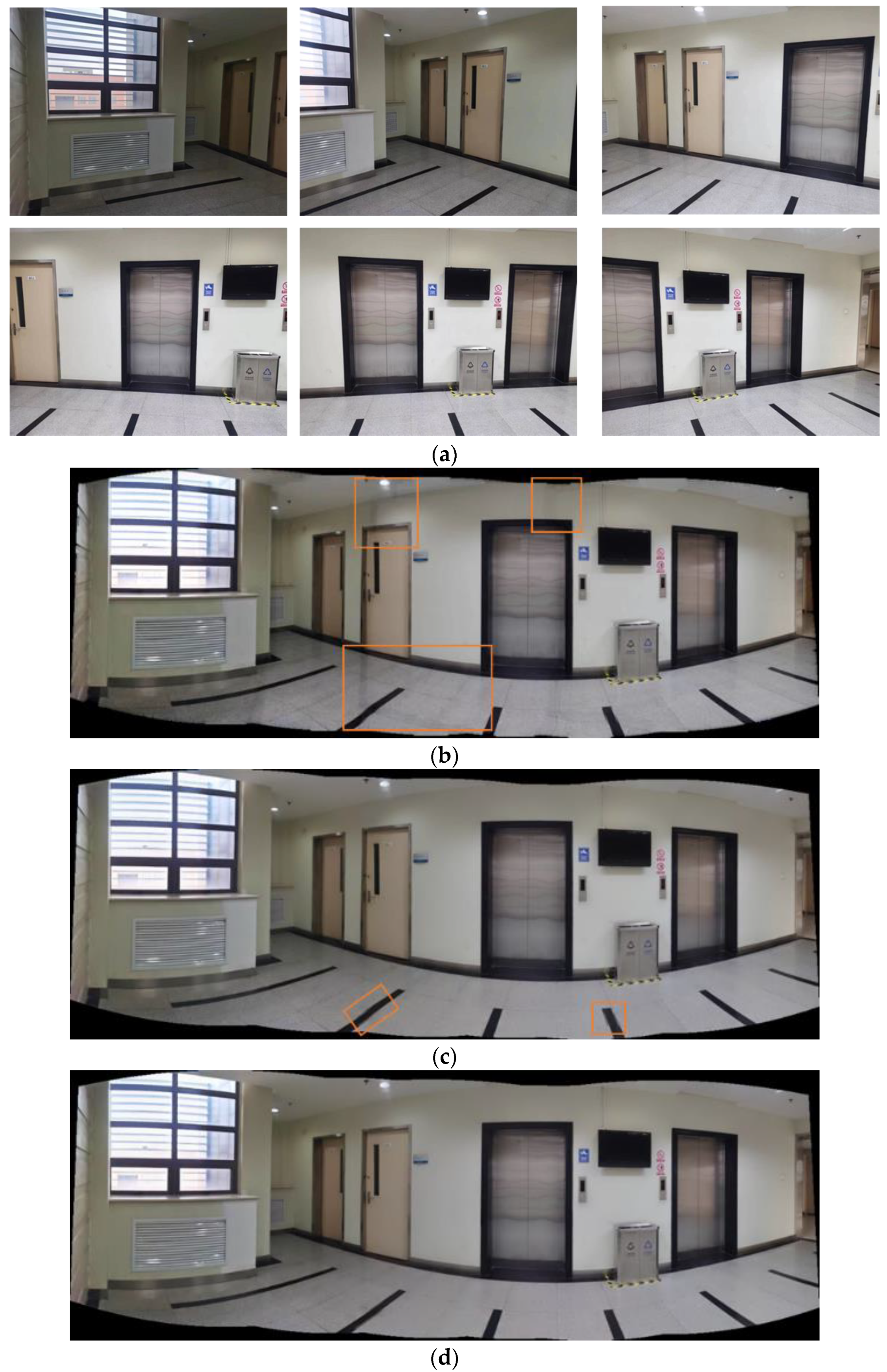
4.2. Analysis of Image Fusion
- Image information entropy. The image information entropy represents the amount of image information. A higher value indicates more image information.
- Mean grey value. The average grayscale value of the image represents the brightness of the image. A higher value indicates more uniform brightness.
- Difference of edge map (DoEM).
- 4.
- Structural similarity measurement (SSIM)
5. Conclusions
- To significantly reduce the stitching time, we aimed to gradually decrease the number of image feature points. While our experiments utilized a large number of feature points, other studies [8] have demonstrated that successful stitching can be achieved with fewer than 80 feature points in overlapping areas. We intend to investigate other approaches to reduce the number of feature points and achieve more efficient image matching.
- Our findings suggest that the degree of overlap between the stitching frames plays a crucial role in image matching efficiency. Interestingly, we discovered that smaller overlapping areas could sometimes increase the time required for image matching. As a result, the camera layout is another important factor to consider in the stitching process. We also observed that different cameras, including phone cameras, network cameras, and wide-angle network cameras, exhibited varying performance levels. Night-time shooting can pose additional noise-related challenges, further complicating image stitching. Consequently, we plan to develop a real multi-resolution dataset that encompasses diverse stitching scenarios to facilitate future research in this field.
- This paper’s panoramic video stitching system was implemented based on the Windows platform. Future work may port the method to the GPU, ARM, or FPGA platform with high parallel computing performance. In this way, embedded panoramic video stitching can be applied in various fields, such as edge computing.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xiang, T.-Z.; Xia, G.-S.; Bai, X.; Zhang, L. Image stitching by line-guided local warping with global similarity constraint. Pattern Recognit. 2018, 83, 481–497. [Google Scholar] [CrossRef] [Green Version]
- Madhusudana, P.C.; Soundararajan, R. Subjective and objective quality assessment of stitched images for virtual reality. IEEE Trans. Image Process. 2019, 28, 5620–5635. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Guo, B.; Guo, X.; Zhi, Y. Real-time UAV imagery stitching based on grid-based motion statistics. J. Phys. Conf. Ser. 2018, 1069, 012163. [Google Scholar] [CrossRef] [Green Version]
- Alwan, M.G.; AL-Brazinji, S.M. Automatic panoramic medical image stitching improvement based on feature-based approach. Period. Eng. Nat. Sci. 2022, 10, 155–163. [Google Scholar] [CrossRef]
- Zhang, T.; Zhao, R.; Chen, Z. Application of migration image registration algorithm based on improved SURF in remote sensing image mosaic. IEEE Access 2020, 8, 163637–163645. [Google Scholar] [CrossRef]
- Rettkowski, J.; Gburek, D.; Göhringer, D. Robot navigation based on an efficient combination of an extended A algorithm, bird’s eye view and image stitching. In Proceedings of the Conference on Design and Architectures for Signal and Image Processing (DASIP), Krakow, Poland, 23–25 September 2015; pp. 1–8. [Google Scholar]
- Hoang, V.-D.; Tran, D.-P.; Nhu, N.G.; Pham, T.-A.; Pham, V.-H. Deep Feature Extraction for Panoramic Image Stitching. In Proceedings of the Intelligent Information and Database Systems: 12th Asian Conference, ACIIDS 2020, Part II 12, Phuket, Thailand, 23–26 March 2020; pp. 141–151. [Google Scholar]
- Liu, W.; Zhang, K.; Zhang, Y.; He, J.; Sun, B. Utilization of Merge-Sorting Method to Improve Stitching Efficiency in Multi-Scene Image Stitching. Appl. Sci. 2023, 13, 2791. [Google Scholar] [CrossRef]
- Bai, Z.; Li, Y.; Chen, X.; Yi, T.; Wei, W.; Wozniak, M.; Damasevicius, R. Real-time video stitching for mine surveillance using a hybrid image registration method. Electronics 2020, 9, 1336. [Google Scholar] [CrossRef]
- He, B.; Yu, S. Parallax-robust surveillance video stitching. Sensors 2016, 16, 7. [Google Scholar] [CrossRef]
- Chen, X.; Yu, M.; Song, Y. Optimized Seam-Driven Image Stitching Method Based on Scene Depth Information. Electronics 2022, 11, 1876. [Google Scholar] [CrossRef]
- Jose, A.; Pachath, A.; Rajesh, A.; Chandhan, P.; Shenil, P. FPGA Based Novel Architecture for Real-Time Video Stitching. In Proceedings of the Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 27–29 November 2021; pp. 1–7. [Google Scholar]
- Du, C.; Yuan, J.; Dong, J.; Li, L.; Chen, M.; Li, T. GPU based parallel optimization for real time panoramic video stitching. Pattern Recognit. Lett. 2020, 133, 62–69. [Google Scholar] [CrossRef] [Green Version]
- Qendri, D. Real Time Video Stitching Implementation on a Zynq FPGA SOC. Master’s Thesis, University of Ontario Institute of Technology, Toronto, ON, Canada, 2019. [Google Scholar]
- Bansal, M.; Kumar, M.; Kumar, M. 2D object recognition: A comparative analysis of SIFT, SURF and ORB feature descriptors. Multimed. Tools Appl. 2021, 80, 18839–18857. [Google Scholar] [CrossRef]
- Zhu, J.; Gong, C.; Zhao, M.; Wang, L.; Luo, Y. Image mosaic algorithm based on PCA-ORB feature matching. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 42, 83–89. [Google Scholar] [CrossRef] [Green Version]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. BRIEF: Binary robust independent elementary features. In Proceedings of the 11th European Conference on Computer Vision, ECCV 2010, Heraklion, Crete, Greece, 5–11 September 2010; pp. 778–792. [Google Scholar]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust invariant scalable keypoints. In Proceedings of the IEEE International Conference on Computer Vision, ICCV 2011, Barcelona, Spain, 6–13 November 2011; pp. 2548–2555. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the IEEE International Conference on Computer Vision, ICCV 2011, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. SURF: Speeded up robust features. In Proceedings of the 9th European Conference on Computer Vision, ECCV 2006, Graz, Austria, 7–13 May 2006; pp. 404–417. [Google Scholar]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2004, Washington, DC, USA, 27 June–2 July 2004; pp. II506–II513. [Google Scholar]
- Yi, K.M.; Trulls, E.; Lepetit, V.; Fua, P. LIFT: Learned invariant feature transform. In Proceedings of the 21st ACM Conference on Computer and Communications Security, CCS 2014, Scottsdale, AZ, USA, 3–7 November 2014; pp. 467–483. [Google Scholar]
- Lin, W.Y.; Wang, F.; Cheng, M.M.; Yeung, S.K.; Torr, P.H.; Do, M.N.; Lu, J. CODE: Coherence Based Decision Boundaries for Feature Correspondence. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 34–47. [Google Scholar] [CrossRef] [PubMed]
- Yakovleva, O.; Nikolaieva, K. Research of descriptor based image normalization and comparative analysis of SURF, SIFT, BRISK, ORB, KAZE, AKAZE descriptors. Adv. Inf. Syst. 2020, 4, 89–101. [Google Scholar] [CrossRef]
- Tareen, S.A.K.; Saleem, Z. A comparative analysis of sift, surf, kaze, akaze, orb, and brisk. In Proceedings of the International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–10. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Chum, O.; Matas, J. Matching with PROSAC—Progressive sample consensus. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2005, San Diego, CA, USA, 20–25 June 2005; pp. 220–226. [Google Scholar]
- Pan, J.; Wang, M.; Cao, X.; Chen, S.; Hu, F. A multi-resolution blending considering changed regions for orthoimage mosaicking. Remote Sens. 2016, 8, 842. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Raskar, R.; Ahuja, N. Seamless video editing. In Proceedings of the 17th International Conference on Pattern Recognition, ICPR 2004, Cambridge, UK, 23–26 August 2004; pp. 858–861. [Google Scholar]
- Gao, J.; Yu, L.; Chin, T.J.; Brown, M.S. Seam-Driven Image Stitching. Eurographics 2013, 13, 45–48. [Google Scholar]
- Wang, B.; Li, H.; Hu, W. Research on key techniques of multi-resolution coastline image fusion based on optimal seam-line. Earth Sci. Inform. 2020, 13, 333–344. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Wan, G.-T.; Wang, J.-P.; Li, J.; Cao, H.-H.; Wang, S.; Wang, L.; Li, Y.-N.; Wei, R. Method for quality assessment of image mosaic. Tongxin Xuebao J. Commun. 2013, 34, 76–81. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Left View | Right View | |||
|---|---|---|---|---|
| Non-Gridded BRISK | Gridded BRISK | Non-Gridded BRISK | Gridded BRISK | |
| Number of feature points | 1156 | 491 | 982 | 486 |
| Detection time (ms) | 9.7607 | 6.3206 | 9.0707 | 4.5506 |
| Image Group | Fusion Algorithm | Information Entropy | Mean Grey Value | SSIM | DoEM |
|---|---|---|---|---|---|
| Building | Optimal seam + fade-in and the fade-out weighting average fusion algorithm | 7.163 | 134.649 | 0.8756 | 0.8714 |
| Optimal seam + multi-resolution fusion algorithm | 7.014 | 135.756 | 0.9082 | 0.8849 | |
| Proposed algorithm | 7.169 | 137.336 | 0.9305 | 0.9573 | |
| Artificial lake | Optimal seam + fade-in and the fade-out weighting average fusion algorithm | 7.224 | 94.835 | 0.8971 | 0.9234 |
| Optimal seam + multi-resolution fusion algorithm | 7.149 | 96.626 | 0.9129 | 0.8496 | |
| Proposed algorithm | 7.244 | 97.231 | 0.9591 | 0.9672 | |
| Indoor | Optimal seam + fade-in and the fade-out weighting average fusion algorithm | 7.173 | 112.582 | 0.9223 | 0.8319 |
| Optimal seam + multi-resolution fusion algorithm | 7.153 | 111.284 | 0.9657 | 0.9074 | |
| Proposed algorithm | 7.16 | 113.461 | 0.9805 | 0.9438 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, H.; Huang, Z.; Yang, H.; Zhang, X.; Cen, C. Research on Improved Multi-Channel Image Stitching Technology Based on Fast Algorithms. Electronics 2023, 12, 1700. https://doi.org/10.3390/electronics12071700
Gao H, Huang Z, Yang H, Zhang X, Cen C. Research on Improved Multi-Channel Image Stitching Technology Based on Fast Algorithms. Electronics. 2023; 12(7):1700. https://doi.org/10.3390/electronics12071700
Chicago/Turabian StyleGao, Han, Zhangqin Huang, Huapeng Yang, Xiaobo Zhang, and Chen Cen. 2023. "Research on Improved Multi-Channel Image Stitching Technology Based on Fast Algorithms" Electronics 12, no. 7: 1700. https://doi.org/10.3390/electronics12071700