

An Efficient 2D DOA Estimation Algorithm Based on OMP for Rectangular Array

Abstract
:1. Introduction
2. Signal Model of Rectangular Array
3. Proposed 2D DOA Algorithm Based on OMP
3.1. Perform 1D DBF in Each Dimension
3.2. Search Peaks on the 1D DBF Results
3.3. Extend the Intermediate Angle Set and Pitch Angle Set
3.4. OMP Algorithm
3.5. Comparison of Computational Complexity
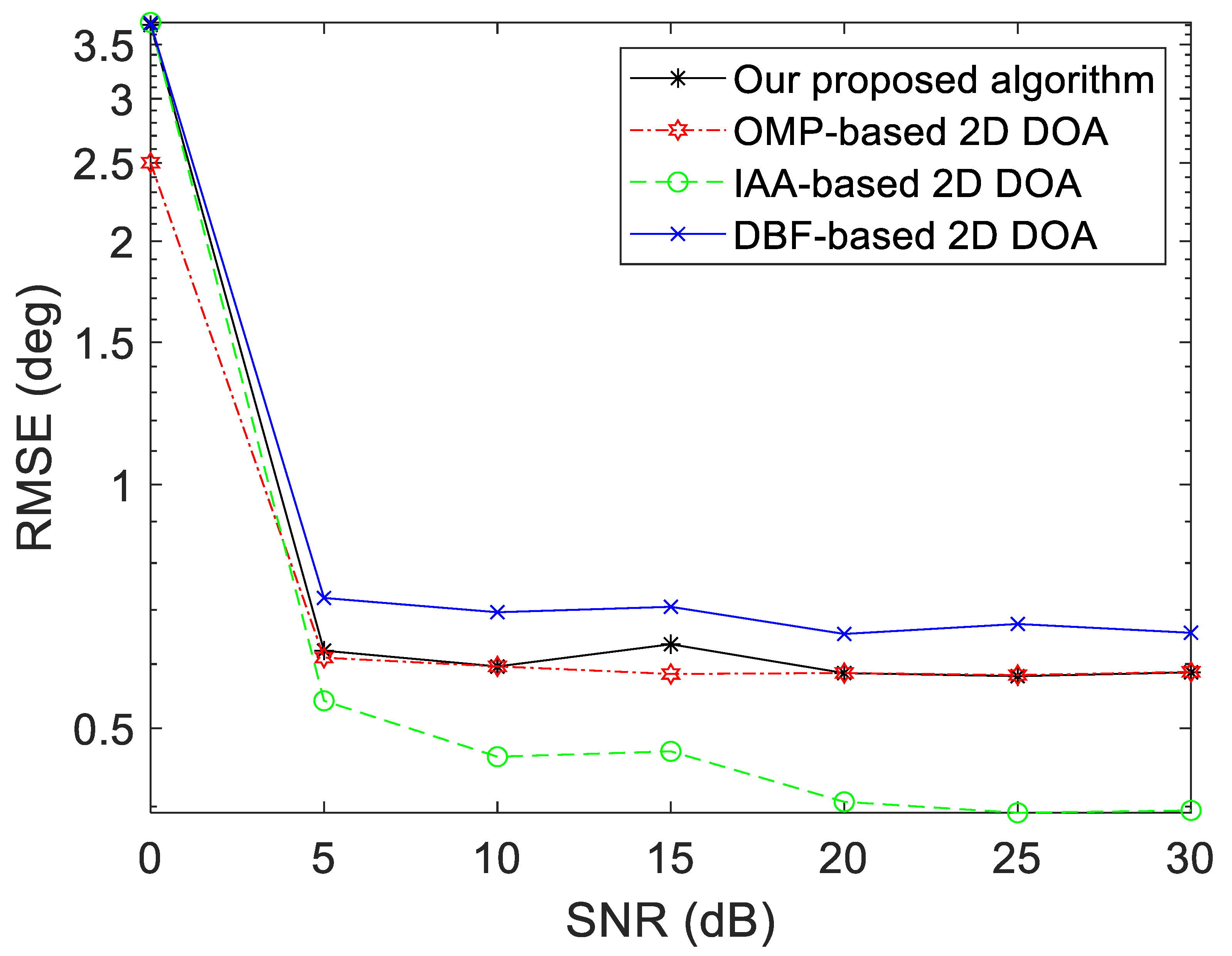
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| OMP | Orthogonal matching pursuit |
| DOA | Direction of arrival |
| 2D | Two-dimensional |
| 1D | One-dimensional |
| MIMO | Multi-input multi-output |
| DBF | Digital beamforming |
| RMSE | Root mean square error |
| SNR | Signal to noise ratio |
| IAA | Iterative adaptive approach |
References
- Zhou, T.; Yang, M.; Jiang, K.; Wong, H.; Yang, D. MMW radar-based technologies in autonomous driving: A review. Sensors 2020, 20, 7283. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Ma, P.; Zhang, X.; Zhao, G. Improved DFT algorithm for 2D DOA estimation based on 1D nested array motion. IEEE Commun. Lett. 2020, 24, 1953–1956. [Google Scholar] [CrossRef]
- Wang, X.; Huang, M.; Wan, L. Joint 2D-DOD and 2D-DOA estimation for coprime EMVS–MIMO radar. Circuits Syst. Signal Process. 2021, 40, 2950–2966. [Google Scholar] [CrossRef]
- Priya, T.S.; Manish, K.; Prakasam, P. Hybrid beamforming for massive MIMO using rectangular antenna array model in 5G wireless networks. Wirel. Pers. Commun. 2021, 120, 2061–2083. [Google Scholar] [CrossRef]
- Zheng, H.; Shi, Z.; Zhou, C.; Haardt, M.; Chen, J. Coupled coarray tensor CPD for DOA estimation with coprime L-shaped array. IEEE Signal Process. Lett. 2021, 28, 1545–1549. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, W.; Wang, J.; Wu, S. Computationally efficient 2-D DOA estimation for uniform rectangular arrays. Multidimens. Syst. Signal Process. 2014, 25, 847–857. [Google Scholar] [CrossRef]
- Cao, M.Y.; Huang, L.; Qian, C.; Xue, J.Y.; So, H.C. Underdetermined DOA estimation of quasi-stationary signals via Khatri–Rao structure for uniform circular array. Signal Process. 2015, 106, 41–48. [Google Scholar] [CrossRef]
- Häcker, P.; Yang, B. Single snapshot DOA estimation. Adv. Radio Sci. 2010, 8, 251–256. [Google Scholar] [CrossRef] [Green Version]
- Sun, S.; Petropulu, A.P.; Poor, H.V. MIMO radar for advanced driver-assistance systems and autonomous driving: Advantages and challenges. IEEE Signal Process. Mag. 2020, 37, 98–117. [Google Scholar] [CrossRef]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J. MIMO radar with widely separated antennas. IEEE Signal Process. Mag. 2007, 25, 116–129. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO Radar Signal Processing; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Wan, T.; Canagarajah, N.; Achim, A. Compressive image fusion. In Proceedings of the 2008 15th IEEE International Conference on Image Processing, San Diego, CA, USA, 12–15 October 2008; pp. 1308–1311. [Google Scholar] [CrossRef]
- Paredes, J.L.; Arce, G.R.; Wang, Z. Ultra-wideband compressed sensing: Channel estimation. IEEE J. Sel. Top. Signal Process. 2007, 1, 383–395. [Google Scholar] [CrossRef]
- Berger, C.R.; Zhou, S.; Preisig, J.C.; Willett, P. Sparse channel estimation for multicarrier underwater acoustic communication: From subspace methods to compressed sensing. IEEE Trans. Signal Process. 2009, 58, 1708–1721. [Google Scholar] [CrossRef] [Green Version]
- Hasch, J.; Topak, E.; Schnabel, R.; Zwick, T.; Weigel, R.; Waldschmidt, C. Millimeter-wave technology for automotive radar sensors in the 77 GHz frequency band. IEEE Trans. Microw. Theory Tech. 2012, 60, 845–860. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef] [Green Version]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Yardibi, T.; Li, J.; Stoica, P.; Xue, M.; Baggeroer, A.B. Source localization and sensing: A nonparametric iterative adaptive approach based on weighted least squares. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 425–443. [Google Scholar] [CrossRef]
- Tan, X.; Roberts, W.; Li, J.; Stoica, P. Sparse learning via iterative minimization with application to MIMO radar imaging. IEEE Trans. Signal Process. 2010, 59, 1088–1101. [Google Scholar] [CrossRef]
- Pallotta, L.; Giunta, G.; Farina, A. DOA refinement through complex parabolic interpolation of a sparse recovered signal. IEEE Signal Process. Lett. 2021, 28, 274–278. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Rossi, P.S. Noncolocated time-reversal MUSIC: High-SNR distribution of null spectrum. IEEE Signal Process. Lett. 2017, 24, 397–401. [Google Scholar] [CrossRef] [Green Version]
- Mao, D.; Yang, J.; Zhang, Y.; Huo, W.; Xu, F.; Pei, J.; Zhang, Y.; Huang, Y. Angular superresolution of real aperture radar with high-dimensional data: Normalized projection array model and adaptive reconstruction. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Abeida, H.; Zhang, Q.; Li, J.; Merabtine, N. Iterative sparse asymptotic minimum variance based approaches for array processing. IEEE Trans. Signal Process. 2012, 61, 933–944. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Sun, J.; Cao, X. Robust direction-of-arrival estimation based on sparse asymptotic minimum variance. J. Eng. 2019, 2019, 7815–7821. [Google Scholar] [CrossRef]
- Luo, J.; Zhang, Y.; Yang, J.; Zhang, D.; Zhang, Y.; Zhang, Y.; Huang, Y.; Jakobsson, A. Online sparse DOA estimation based on sub–aperture recursive LASSO for TDM–MIMO radar. Remote Sens. 2022, 14, 2133. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef] [Green Version]
- Pati, Y.C.; Rezaiifar, R.; Krishnaprasad, P.S. Orthogonal matching pursuit: Recursive function approximation with applications to wavelet decomposition. In Proceedings of the 27th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 1–3 November 1993; pp. 40–44. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Wu, M.; Wu, S. Fast OMP algorithm for 2D angle estimation in MIMO radar. Electron. Lett. 2010, 46, 444–445. [Google Scholar] [CrossRef]
- Chen, C.Y.; Vaidyanathan, P. Compressed sensing in MIMO radar. In Proceedings of the 2008 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–29 October 2008; pp. 41–44. [Google Scholar] [CrossRef] [Green Version]
- Van Trees, H.L. Optimum Array Processing: Part IV of Detection, Estimation, and Modulation Theory; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar] [CrossRef]
- Yang, T. Deconvolved conventional beamforming for a horizontal line array. IEEE J. Ocean. Eng. 2017, 43, 160–172. [Google Scholar] [CrossRef]
- Laub, A.J. Matrix Analysis for Scientists and Engineers; SIAM: Philadelphia, PA, USA, 2005; Volume 91. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Parameter Description | Symbol | Value | Unit |
|---|---|---|---|
| Light Speed | c | m/s | |
| Central Frequency | Hz | ||
| Wavelength | m | ||
| Snapshot Number | 1 | ||
| Target Number | K | 3 | |
| Element Number per Row | M | 20 | |
| Element Number per Column | N | 20 | |
| Adjacent Element Distance in Row | m | ||
| Adjacent Element Distance in Column | m | ||
| Randomized Simulation Number | 1500 | ||
| Discrete Number of Intermediate Angle | P | 181 | |
| Discrete Number of Pitch Angle | Q | 181 |
| Algorithms | Average Time Consumed (s) |
|---|---|
| OMP-based 2D DOA | 0.3934 |
| DBF-based 2D DOA | 0.0286 |
| Our proposed algorithm | 0.0244 |
| IAA-based 2D DOA | 15.1074 |
| Target 1 | Target 2 | |
|---|---|---|
| 2D angle of target | ||
| OMP-based 2D DOA | ||
| IAA-based 2D DOA | ||
| DBF-based 2D DOA | ||
| Our proposed algorithm | ||
| Our proposed algorithm (without the angle set extension operation) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Hu, J.; Zhang, Q.; Yuan, X. An Efficient 2D DOA Estimation Algorithm Based on OMP for Rectangular Array. Electronics 2023, 12, 1634. https://doi.org/10.3390/electronics12071634
Wang C, Hu J, Zhang Q, Yuan X. An Efficient 2D DOA Estimation Algorithm Based on OMP for Rectangular Array. Electronics. 2023; 12(7):1634. https://doi.org/10.3390/electronics12071634
Chicago/Turabian StyleWang, Chuang, Jianmin Hu, Qunying Zhang, and Xinhao Yuan. 2023. "An Efficient 2D DOA Estimation Algorithm Based on OMP for Rectangular Array" Electronics 12, no. 7: 1634. https://doi.org/10.3390/electronics12071634