
ASA-DRNet: An Improved Deeplabv3+ Framework for SAR Image Segmentation

Abstract
:1. Introduction
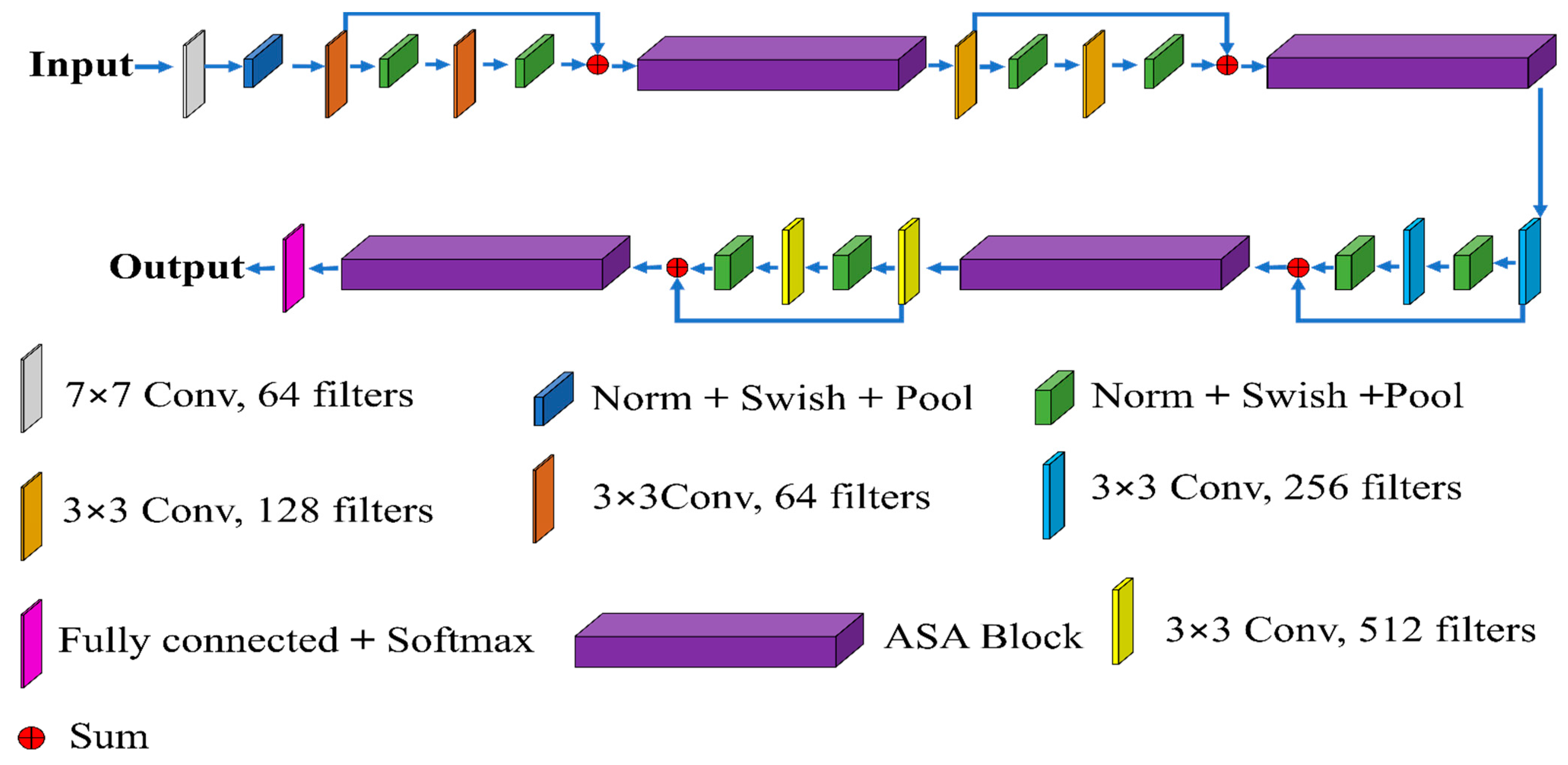
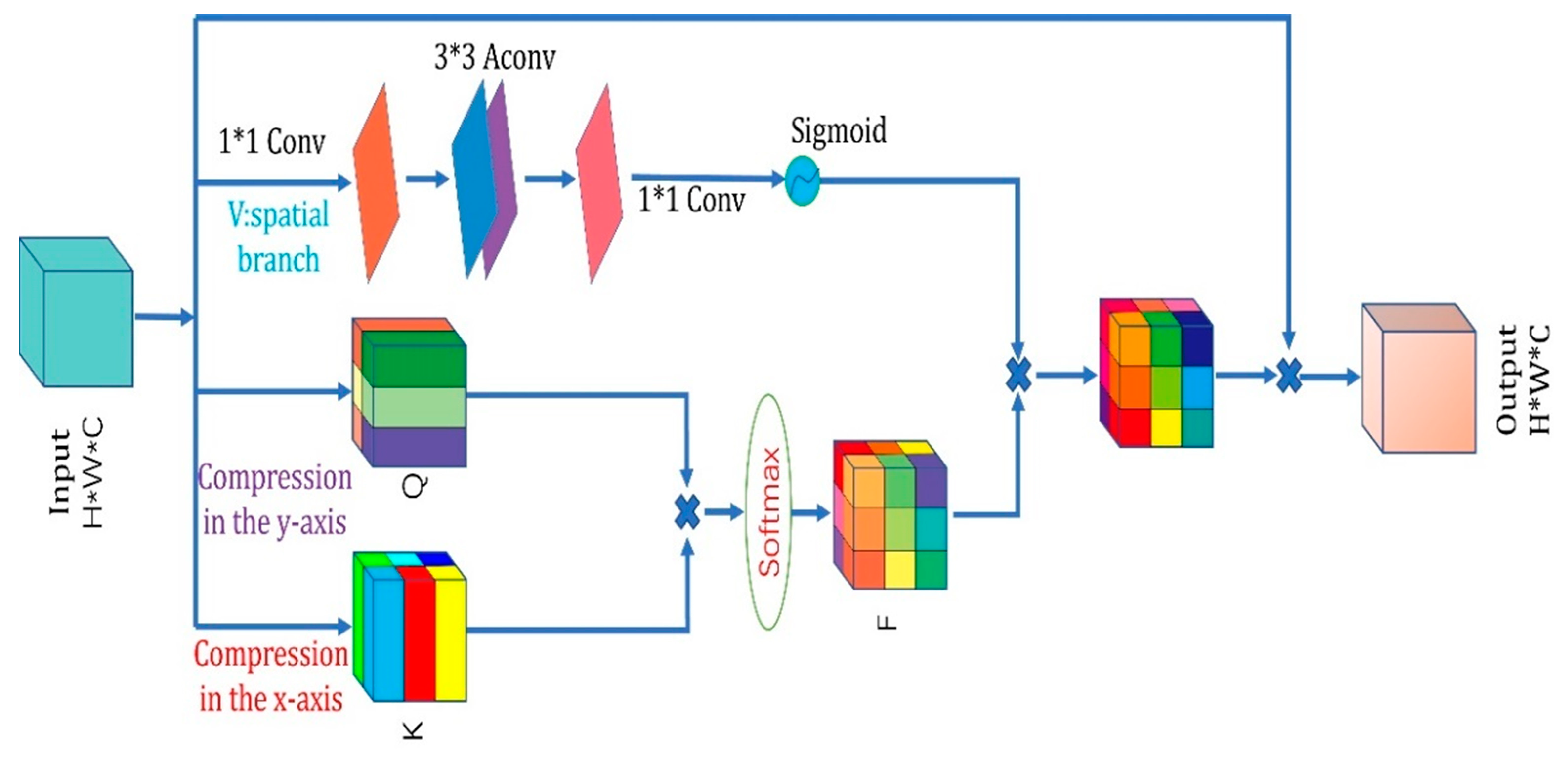
- ResNet-18 and axial self-attention are combined as the new backbone of the DeepLabv3+ encoder to enhance the extraction of important features, and avoid the interference of errors and irrelevant features, to obtain more adequate and comprehensive deeper features.
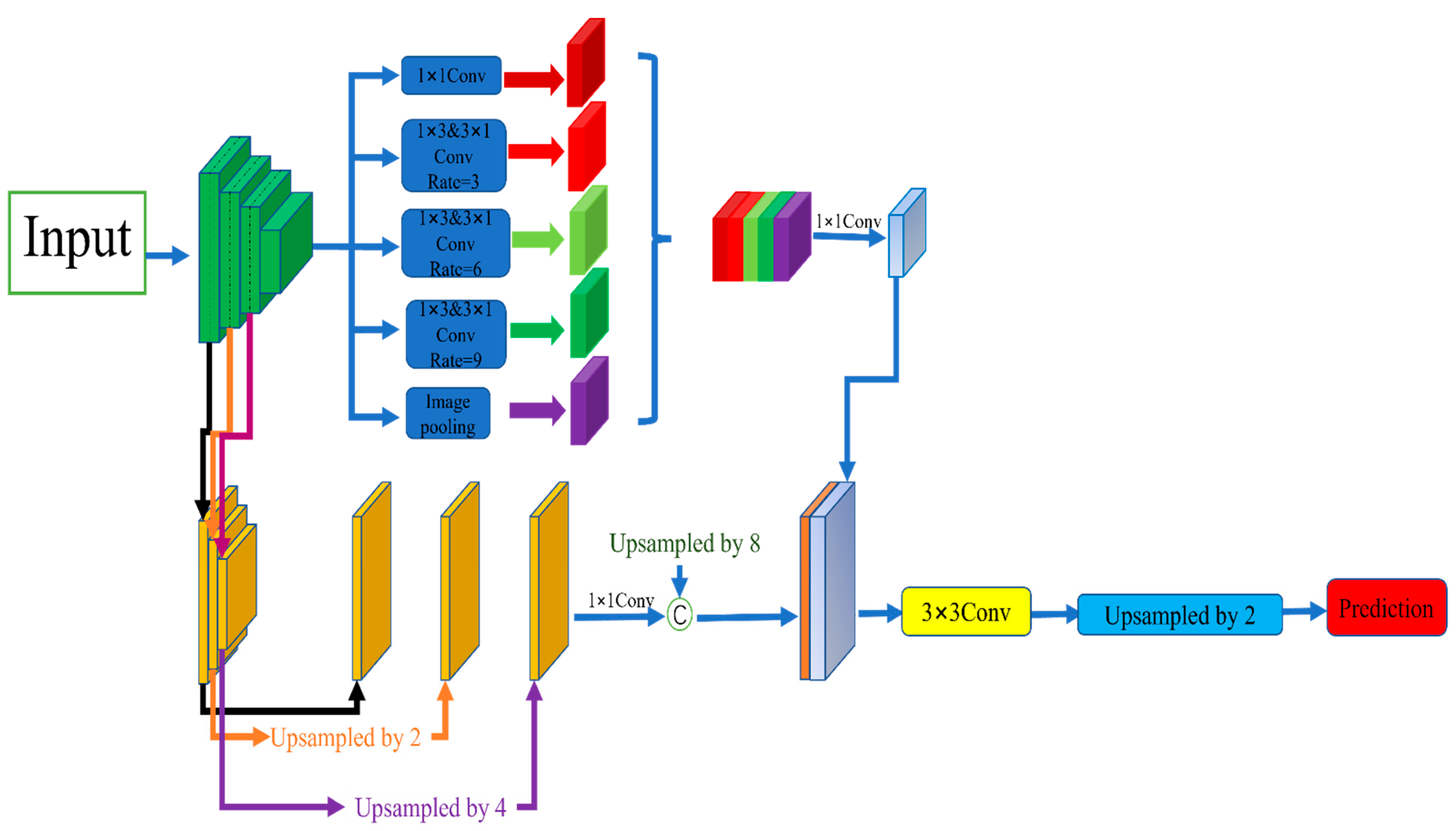
- Optimizing the structure of Atrous Spatial Pyramid Pooling (ASPP) is achieved by reducing the expansion rate of atrous convolutions in equal proportion, and then performing 2D decomposition which increases the perceptual field while reducing the parameters of the model. All of these improve the speed of detection and also avoid the loss of target information to obtain more comprehensive features.
- The capacity of the network to extract edge information is optimized by integrating low-level features at different resolutions to improve the accuracy of segmentation.
2. Related Work
2.1. Traditional Methods
2.2. Deep Learning Methods
3. The Proposed ASA-DRNet Model
3.1. DCNN Module (ResNet-18 + Axial Self Attention)
3.2. The Proposed Axial Self Attention Block
3.3. Optimized ASPP Module
3.4. Decoder Module
4. Experimental Results
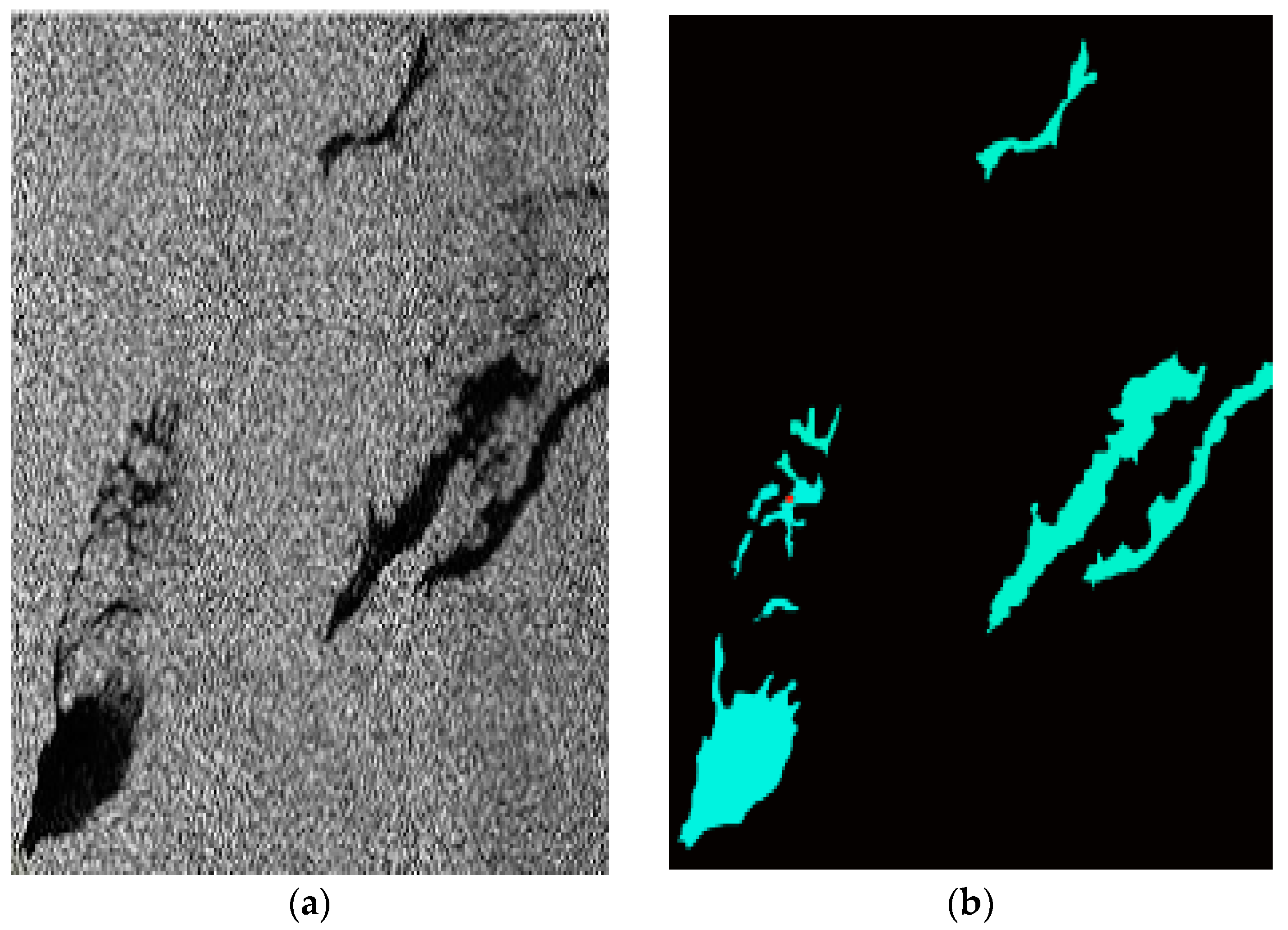
4.1. Dataset
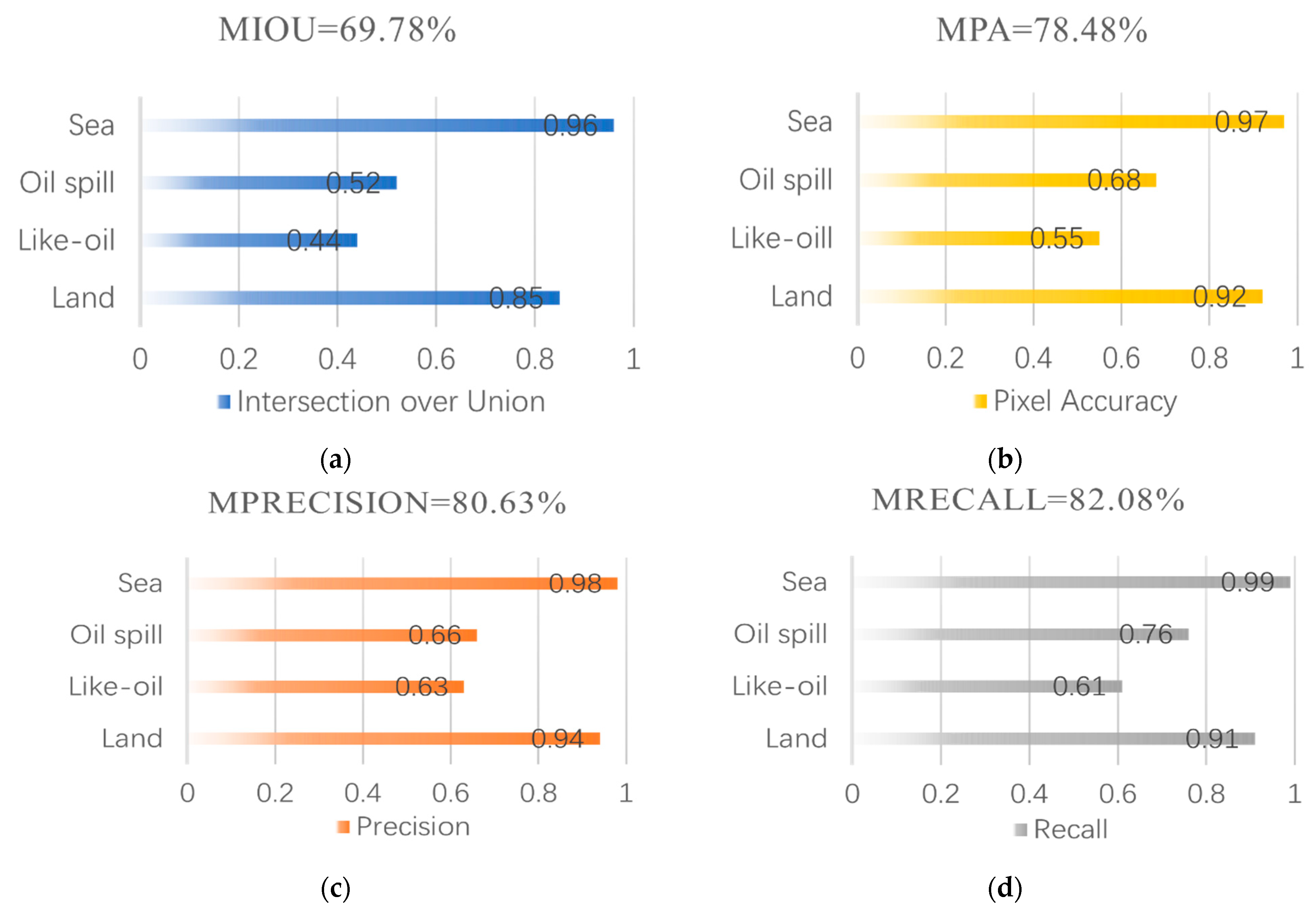
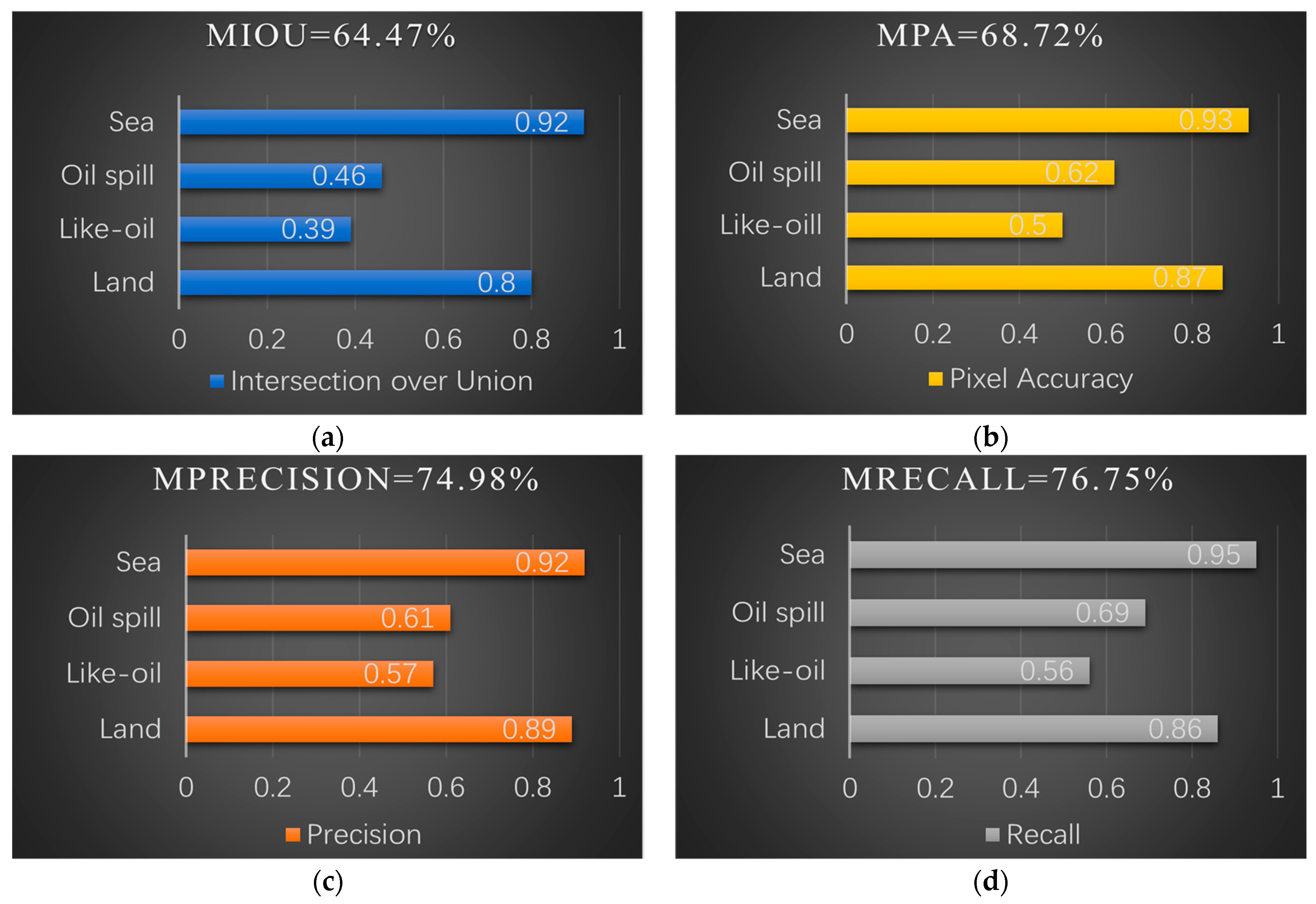
4.2. Evaluation Metrics
4.3. Results and Analysis
4.3.1. Experimental Results of ASA-DRNet
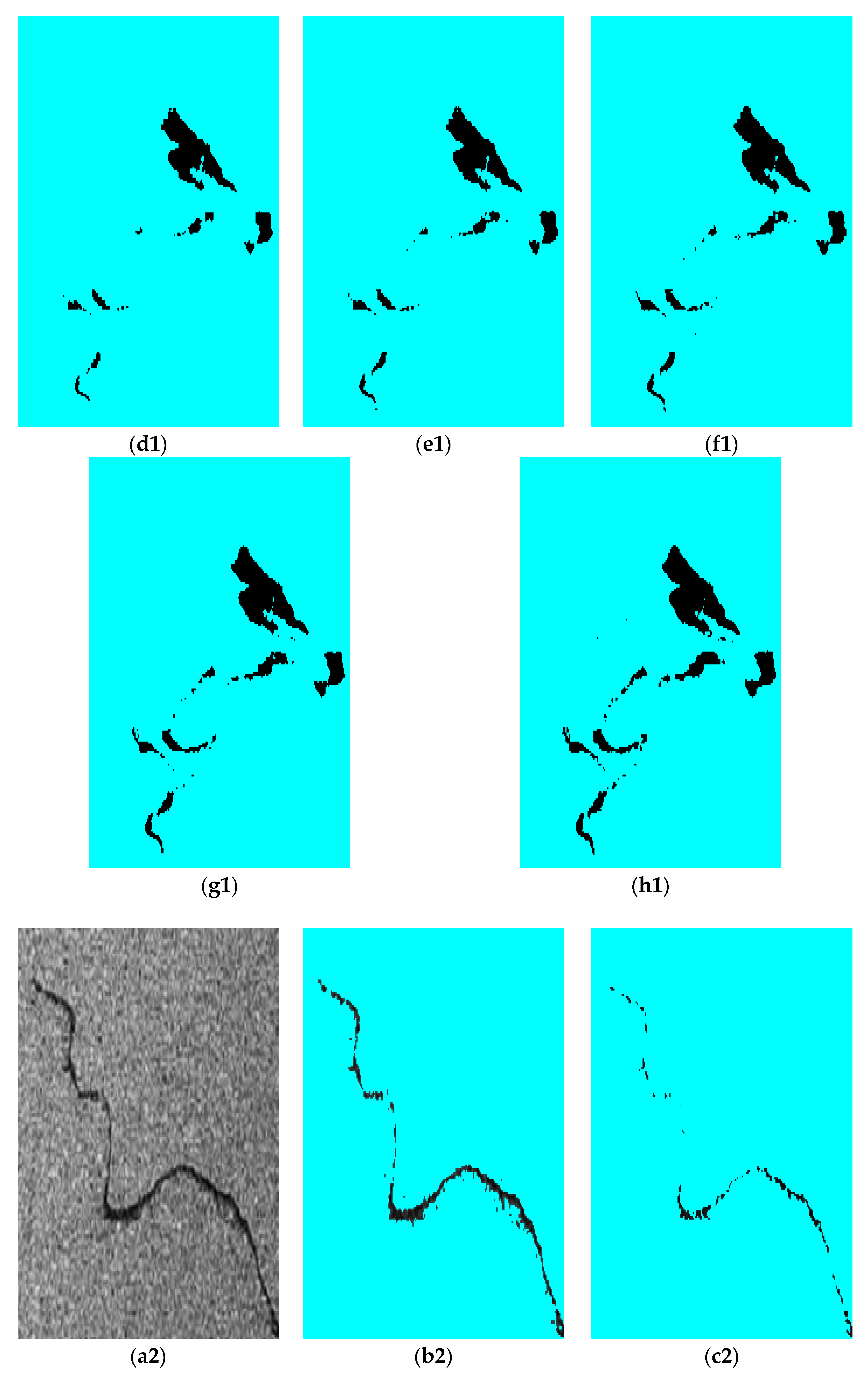
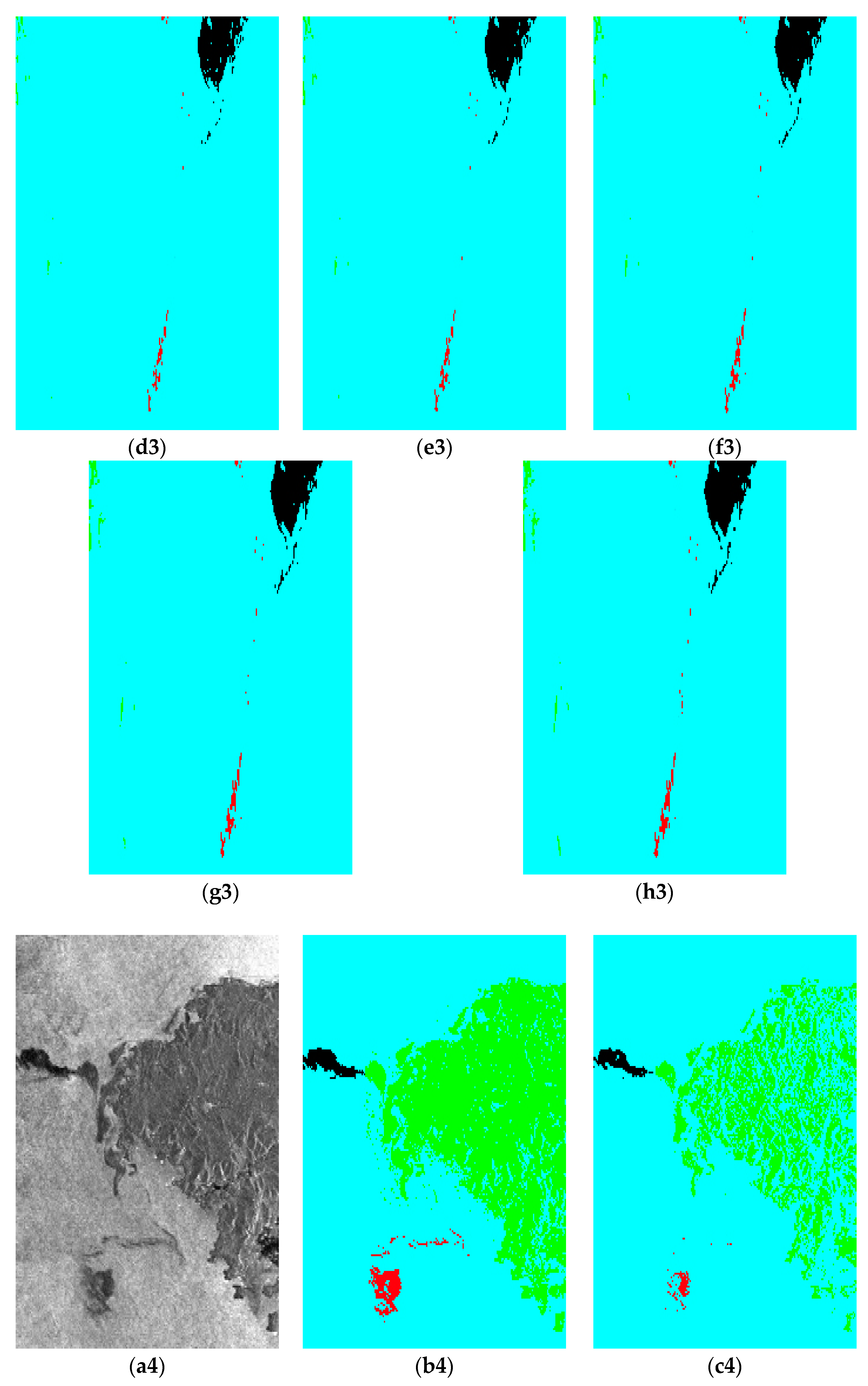
4.3.2. Results of the Comparison Experiment
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| SAR | synthetic aperture radar |
| FCN | fully convolutional network |
| PSPN | pyramid scene parsing network |
| DCNN | deep convolutional neural network |
| DRNet | deeplabv3+resnet-18 |
| ASPP | atrous spatial pyramid pooling |
| SE | squeeze and excitation module |
| ASA | axial self attention |
References
- Kvenvolden, K.A.; Cooper, C.K. Natural seepage of crude oil into the marine environment. Geo-Mar. Lett. 2003, 23, 140–146. [Google Scholar] [CrossRef]
- Jiao, Z.; Jia, G.; Cai, Y. A new approach to oil spill detection that combines deep learning with unmanned aerial vehicles. Comput. Ind. Eng. 2019, 135, 1300–1311. [Google Scholar] [CrossRef]
- Liu, Y.; MacFadyen, A.; Ji, Z.G.; Weisberg, R.H. (Eds.) Monitoring and Modeling the Deepwater Horizon Oil Spill: A Recordbreaking Enterprise; American Geophysical Union, Geopress: Washington, DC, USA, 2011; Volume 195, p. 271. [Google Scholar]
- White, H.K.; Hsing, P.Y.; Cho, W.; Shank, T.M.; Cordes, E.E.; Quattrini, A.M.; Nelson, R.K.; Camilli, R.; Demopoulos, A.W.J.; German, C.R.; et al. Impact of the Deepwater Horizon oil spill on a deep-water coral community in the Gulf of Mexico. Proc. Natl. Acad. Sci. USA 2012, 109, 20303–20308. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Keramitsoglou, I.; Cartalis, C.; Kiranoudis, C.T. Automatic identification of oil spills on satellite images. Environ. Model. Softw. 2006, 21, 640–652. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Eltoft, T. Characterization of marine surface slicks by Radarsat-2 multipolarization features. IEEE Trans. Geosci. Remote Sens. 2013, 52, 5302–5319. [Google Scholar] [CrossRef] [Green Version]
- Zheng, H.; Zhang, Y.; Wang, Y.; Zhang, X.; Meng, J. The polarimetric features of oil spills in full polarimetric synthetic aperture radar images. Acta Oceanol. Sin. 2017, 36, 105–114. [Google Scholar] [CrossRef]
- Zeng, K.; Wang, Y. A deep convolutional neural network for oil spill detection from spaceborne SAR images. Remote Sens. 2020, 12, 1015. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Perrie, W.; Li, X.; Pichel, W.G. Mapping sea surface oil slicks using RADARSAT-2 quad-polarization SAR image. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef] [Green Version]
- Zheng, H.; Zhang, Y.; Wang, Y. Polarimetric features analysis of oil spills in C-band and L-band SAR images. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS 2016, Beijing, China, 11–15 July 2016; pp. 4683–4686. [Google Scholar]
- Topouzelis, K.; Karathanassi, V.; Pavlakis, P.; Rokos, D. Detection and discrimination between oil spills and look-alike phenomena through neural networks. ISPRS J. Photogramm. Remote Sens. 2007, 62, 264–270. [Google Scholar] [CrossRef]
- Del Frate, F.; Petrocchi, A.; Lichtenegger, J.; Calabresi, G. Neural networks for oil spill detection using ERS-SAR data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2282–2287. [Google Scholar] [CrossRef] [Green Version]
- Singha, S.; Bellerby, T.J.; Trieschmann, O. Satellite oil spill detection using artificial neural networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2355–2363. [Google Scholar] [CrossRef]
- Brekke, C.; Solberg, A.H.S. Classifiers and confidence estimation for oil spill detection in ENVISAT ASAR images. IEEE Geosci. Remote Sens. Lett. 2008, 5, 65–69. [Google Scholar] [CrossRef]
- Xu, L.; Li, J.; Brenning, A. A comparative study of different classification techniques for marine oil spill identification using RADARSAT-1 imagery. Remote Sens. Environ. 2014, 141, 14–23. [Google Scholar] [CrossRef]
- Singha, S.; Ressel, R.; Velotto, D.; Lehner, S. A combination of traditional and polarimetric features for oil spill detection using TerraSAR-X. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4979–4990. [Google Scholar] [CrossRef] [Green Version]
- Shelhamer, E.; Long, J.; Darrell, T. Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 39, 640–651. [Google Scholar] [CrossRef]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid Scene Parsing Network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Diakogiannis, F.I.; Waldner, F.; Caccetta, P.; Wu, C. ResUNet-a: A deep learning framework for semantic segmentation of remotely sensed data. arXiv 2019, arXiv:1904.00592. [Google Scholar] [CrossRef] [Green Version]
- Jha, D.; Smedsrud, P.H.; Riegler, M.; Johansen, D.; de Lange, T.; Halvorsen, P.; Johansen, H.D. ResUNet++: An Advanced Architecture for Medical Image Segmentation. In Proceedings of the 2019 IEEE International Symposium on Multimedia (ISM), San Diego, CA, USA, 9–11 December 2019; pp. 2225–2255. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. In Proceedings of the 15th European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Kong, Y.Y.; Liu, Y.J. A Novel Deeplabv3+ Network for SAR Imagery Semantic Segmentation Based on the Potential Energy Loss Function of Gibbs Distribution. Remote Sens. 2021, 13, 454. [Google Scholar] [CrossRef]
- Solberg, A.H.S.; Solberg, R. A large-scale evaluation of features for automatic detection of oil spills in ERS SAR image. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS 1996, Lincoln, NE, USA, 2–31 May 1996; pp. 1484–1486. [Google Scholar]
- Orfanidis, G.; Ioannidis, K.; Avgerinakis, K.; Vrochidis, S.; Kompatsiaris, I. A deep neural network for oil spill semantic segmentation in Sar images. In Proceedings of the International Conference on Image Processing, Athens, Greece, 7–10 October 2018; pp. 3773–3777. [Google Scholar]
- Topouzelis, K.; Psyllosm, A. Oil spill feature selection and classification using decision tree forest on SAR image data. ISPRS J. Photogramm. Remote Sens. 2012, 68, 135–143. [Google Scholar] [CrossRef]
- Yin, J.; Moon, W.; Yang, J. Model-based pseudo-quad-pol reconstruction from compact polarimetry and its application to oil-spill observation. J. Sens. 2015, 2015. [Google Scholar] [CrossRef] [Green Version]
- Singha, S.; Vespe, M.; Trieschmann, O. Automatic Synthetic Aperture Radar based oil spill detection and performance estimation via a semi-automatic operational service benchmark. Mar. Pollut. Bull. 2013, 73, 199–209. [Google Scholar] [CrossRef] [PubMed]
- Skrunes, S.; Brekke, C.; Eltoft, T. Oil spill characterization with multi-polarization C-and X-band SAR. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS 2012, Munich, Germany, 22–27 July 2012; pp. 5117–5120. [Google Scholar]
- Bing, D.; Jinsong, C. An algorithm based on cross-polarization ratio of SAR image for discriminating between mineral oil and biogenic oil. Remote Sens. Technol. Appl. 2013, 28, 103–107. [Google Scholar]
- Li, Y.Q.; Lyu, X.R. Oil Spill Detection with Multiscale Conditional Adversarial Networks with Small-Data Training. Remote Sens. 2021, 13, 2378. [Google Scholar] [CrossRef]
- Fan, Y.L.; Rui, X.P. Feature merged network for oil spill detection using SAR images. Remote Sens. 2021, 13, 3174. [Google Scholar] [CrossRef]
- Shirvany, R.; Chabert, M.; Tourneret, J.Y. Ship and oil-spill detection using the degree of polarization in linear and hybrid/compact dual-pol SAR. IEEE J. Sel. Top. Appl. Earth Observ. 2012, 5, 885–892. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, C.; Wu, H.; Chen, P. An improved Deeplabv3+ semantic segmentation algorithm with multiple loss constraints. PLoS ONE 2022, 17, e0261582. [Google Scholar] [CrossRef]
- Wang, D.W.; Wan, J.H.; Liu, S.W.; Chen, Y.L. BO-DRNet: An improved deep learning model for oil spill detection by polarimetric features from SAR images. Remote Sens. 2022, 14, 264. [Google Scholar] [CrossRef]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer using Shifted Windows. arXiv 2021, arXiv:2103.14030. [Google Scholar]
- Chen, G.; Li, Y.; Sun, G.; Zhang, Y. Application of deep networks to oil spill detection using polarimetric synthetic aperture radar images. Appl. Sci. 2017, 7, 968. [Google Scholar] [CrossRef]
- Gallego, A.J.; Gil, P.; Pertusa, A.; Fisher, R. Segmentation of oil spills on side-looking airborne radar imagery with autoencoders. Sensors 2018, 18, 797. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Xu, J.; Wu, P.; Kong, P. Oil Spill Detection Based on Deep Convolutional Neural Networks using Polarimetric Scattering Information from Sentinel-1 SAR Images. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–13. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment Name | Environmental Parameters |
|---|---|
| Computer system | MAX OSX |
| CPU | i5 5250U 1.6 Ghz |
| Graphics card | IntelHD Graphics 6000 |
| Programming language | m |
| Deep learning framework | DeepNetworkdesigner |
| Visual library | Matlab 2022a |
| Hyperparameters | Value |
|---|---|
| LearnRateDropPeriod | 10 |
| LearnRateDropFactor | 0.3 |
| InitialLearnRate | 0.001 |
| MaxEpochs | 10 |
| MiniBatchSize | 4 |
| L2Regularization | 0.005 |
| Method | mIOU | mPA | mPrecision | mRecall |
|---|---|---|---|---|
| ResNet | 55.12% | 58.96% | 64.36% | 69.92% |
| SegNet | 56.72% | 61.56% | 68.74% | 71.35% |
| UNet | 59.25% | 63.86% | 70.64% | 73.18% |
| DRNet | 61.76% | 65.16% | 72.24% | 74.66% |
| SE-DRNet | 63.21% | 67.42% | 73.78% | 75.43% |
| ASA-DRNet | 64.47% | 68.72% | 74.98% | 76.75% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Wei, X.; Zheng, W. ASA-DRNet: An Improved Deeplabv3+ Framework for SAR Image Segmentation. Electronics 2023, 12, 1300. https://doi.org/10.3390/electronics12061300
Chen S, Wei X, Zheng W. ASA-DRNet: An Improved Deeplabv3+ Framework for SAR Image Segmentation. Electronics. 2023; 12(6):1300. https://doi.org/10.3390/electronics12061300
Chicago/Turabian StyleChen, Siyuan, Xueyun Wei, and Wei Zheng. 2023. "ASA-DRNet: An Improved Deeplabv3+ Framework for SAR Image Segmentation" Electronics 12, no. 6: 1300. https://doi.org/10.3390/electronics12061300