1. Introduction
With the proposal of China’s “3060” dual carbon target, China’s current fossil-based energy sources have brought great challenges and opportunities, and it is foreseeable that access to a high proportion of new energy sources, such as solar and wind power, will become an important part of the AC/DC system [
1]. Three-port DC converters, also known as energy routers or power electronic transformers [
2,
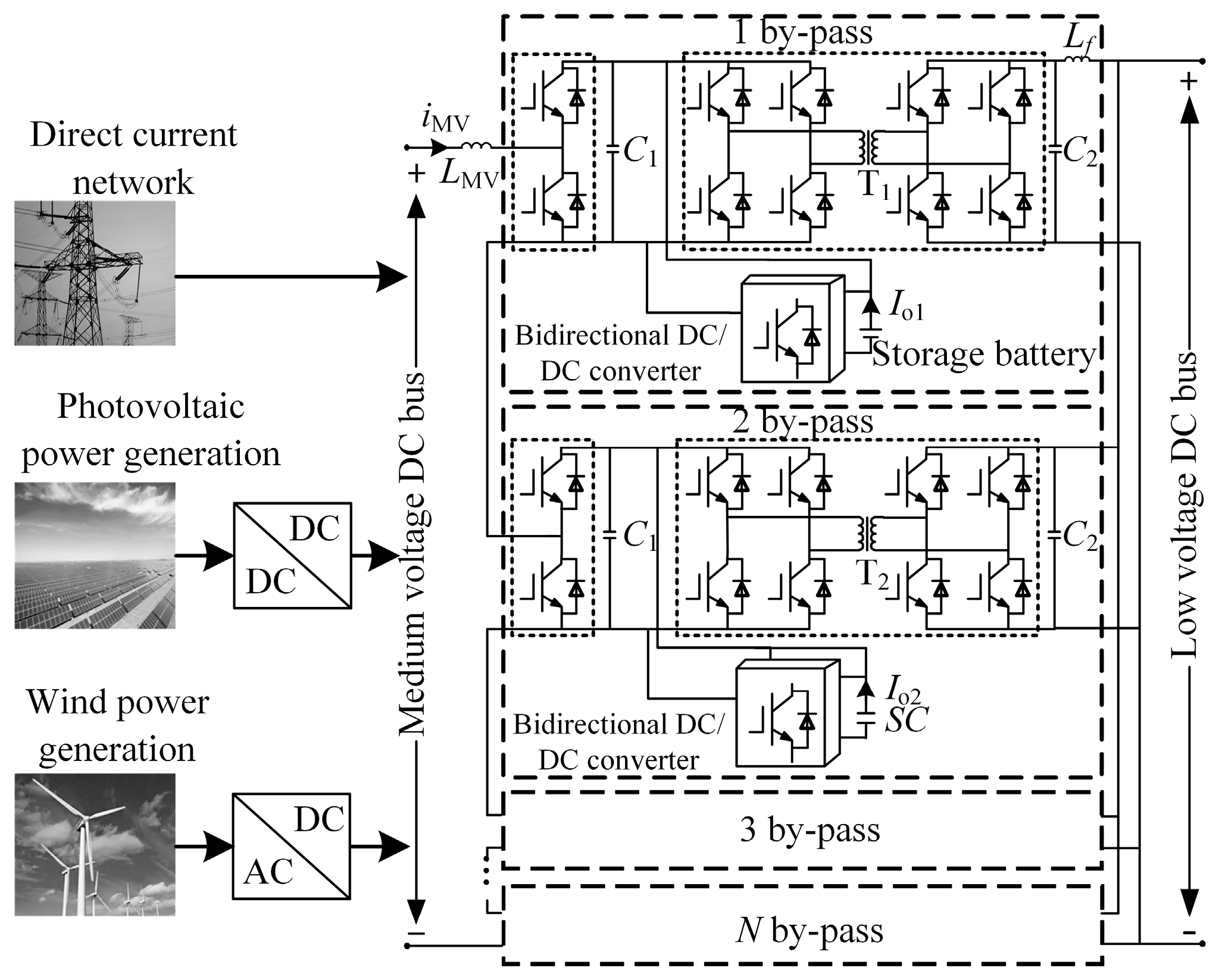
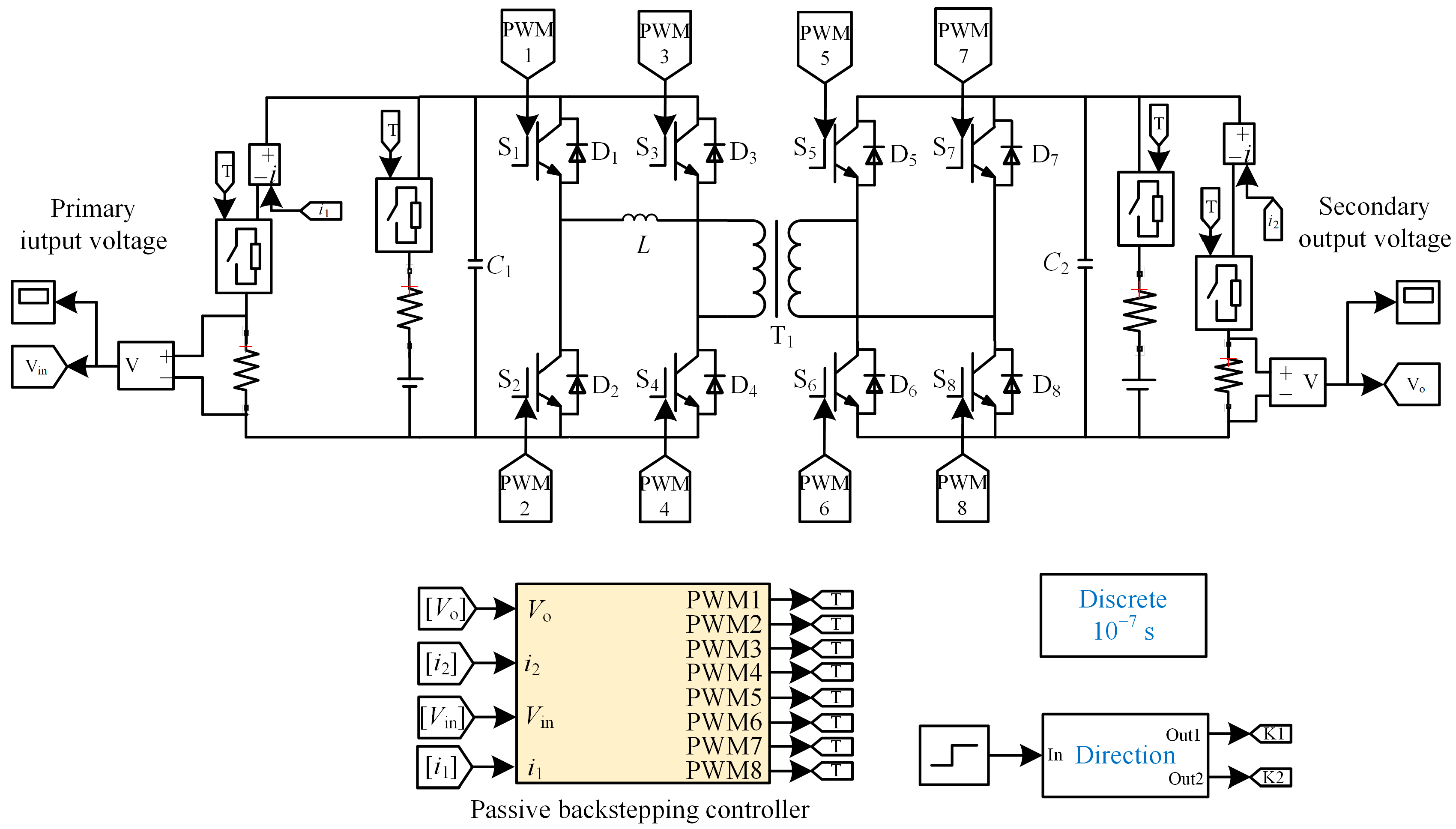
3], which enable access to renewable energy, energy storage unit access, power control and regulation, involve theories and technologies that have become a hot topic of current research. As the key equipment connecting distributed energy sources and energy storage units, the three-port DC converter can achieve electrical isolation on the high and low voltage side and provide interfaces to different voltage levels, power control and other functions. The individual converter is limited by disadvantages such as low voltage, power levels and small capacity, so most modular combinations are used to form modular three-port DC converter with inputs in series and outputs in parallel, as shown in
Figure 1.
The modular three-port DC converter combines the half-bridge sub-module, dual active bridge (DAB) converter and energy storage unit module. The DC grid provides energy support for the entire converter, and wind power generation and photovoltaic power generation can be connected to the medium voltage DC bus via the converter according to demand. The inclusion of an energy storage unit, which charges and discharges according to its own charge state when the distributed energy power output is surplus or insufficient, maintains the stability of the low-voltage DC bus supply and improves the flexibility of converter operation. The output stage DAB converter, which carries the conversion and bi-directional transfer of energy at different voltage levels, is the core part of the modular three-port DC converter. DAB converter is widely used in hybrid electric vehicles [
4] and DC microgrids [
5,
6] and have a broad application prospect in the field of electrified traction power supply systems [
7] due to their advantages of bi-directional energy transmission, high transmission power and easy modular expansion. The above fields require flexible control of output voltage and output power to improve power quality, which puts high demands on the controller performance of the converter.
During the energy transfer and conversion of the DAB converter, an accurate, robust and fast dynamic response is required to improve the dynamic response speed of the converter during load switching or input voltage instability and to quickly track new operating modes in a timely manner [
8,
9]. Reference [
10] combined the traditional inductor current peak control and single phase shift control to form a boundary control method by sampling the inductor current. This method significantly speeds up the dynamic response of the DC-DC converter when the load changes suddenly, but the control process of this method is too complex, requiring as many as five Hall sensors, and too many detected variables increase the calculation. Reference [
11] proposes a dual-band peak current controller with feedforward compensation. It not only has a very fast dynamic response but also can dynamically adjust the output voltage. However, this method does not verify the reverse transmission mode and does not meet the requirements of bidirectional power transmission of the converter. Kan et al. [
12] proposed a multivariable solution algorithm based on the principle of high-frequency AC voltage rise and fall, which does not rely on the accurate feedback of current sensors, reduces the current stress of switching devices and ensures efficient conversion of converters. When combined with the above literature, the existing research mainly uses the traditional control theory to design the controller of the DAB converter, but the primary and secondary sides of the converter contain controllable degrees of freedom, which often has poor dynamic characteristics and is difficult to adapt to multi-working conditions.
In order to overcome the above problems, relevant scholars have proposed sliding mode control [
13], model predictive control [
14] and other control methods, one after another. They use nonlinear control algorithms to design the output voltage or current controller of the DAB converter, which has strong robustness to input uncertainties and disturbances. Reference [
15] applies the fuzzy logic control strategy to the battery charging current control of the DAB converter, in which no previous information about the system parameters is required. Askarian et al. [
16] adopted a new digital control system, including a hybrid modulator and a new compensator. Based on the geometric sequence control algorithm, the compensator can achieve a fast transient response and accurate output current/voltage regulation. In [
17], by analyzing the transmission characteristics of the DAB converter and taking the traditional phase-shift control as an example, a model predictive control strategy based on the state space average model of the converter was established to eliminate the problem of unbalanced transmission power. The control strategy in the above literature greatly improves the dynamic response speed of the DAB converter, but it also has the problem of relying on accurate sampling information at the current time, and a slight error affects the follow-up and overall control effect. In addition, nonlinear control rarely involves the converter working under the condition of input voltage fluctuation.
As an important control method of nonlinear systems, passivity-based control (PBC) is easy to design and has strong robustness to external changes in output dynamic response. It is widely used in nonlinear systems such as modular multilevel matrix converters and grid-connected inverters to reduce control parameters, improve dynamic response speed and enhance anti-interference ability. Cheng et al. [
18] introduced passivity-based control to a permanent magnet synchronous motor, which can quickly reach the desired stable value and has excellent dynamic performance. In reference [
19], to improve the output voltage of the DC bus of a quasi-z-source three-level grid-connected inverter, passivity-based control was adopted, and 20 Ω injection damping was selected, which improves the dynamic characteristics and robustness of the system. In the design process of the above passive controller, the pursuit of global stability under nonsingular points sacrifices the transient performance of the system, and it is difficult to track external voltage disturbances quickly, which affects the overall control effect. To eliminate the influence of input changes, in [
20], aiming at power fluctuations caused by load changes in an interconnected converter, on the basis of power outer loop control containing action threshold, an internal loop backstepping control (BSC) strategy based on interference observer was proposed to improve the resistance ability of microgrid to external impact, shortening the time to steady state. The authors of [
21] organically combined the port-controlled dissipative Hamiltonian system with the backstepping control, effectively suppressed the interphase circulation of the modular multilevel matrix converter, ensured global stability and took into account the fast dynamic response. The backstepping control can quickly track the output voltage under external disturbances, which can effectively make up for the defects of passivity-based control. Therefore, the combination of backstepping control and passivity-based control can balance the control accuracy and response speed of the DAB converter and ensure the global asymptotic stability and robustness of the control system.
To improve the dynamic response of the output of the DAB converter and to achieve forward and reverse power transfer mode switching of the DAB converter, a passive backstepping control (PBSC) strategy based on the Euler–Lagrange (E-L) model is introduced into the DAB converter. First, the single-phase shift control and first-order dynamic mathematical model of the DAB converter are analyzed. The E-L model of the DAB converter is then established to satisfy the concept of passivity, the passivity-based control rate equation of the converter is derived, the passive controller is designed and the passive backstepping controller is finally designed by combining with backstepping control. Finally, the excellent characteristics of the passive backstepping control strategy are verified by Matlab/Simulink simulation.
3. E-L Model of DAB Converter
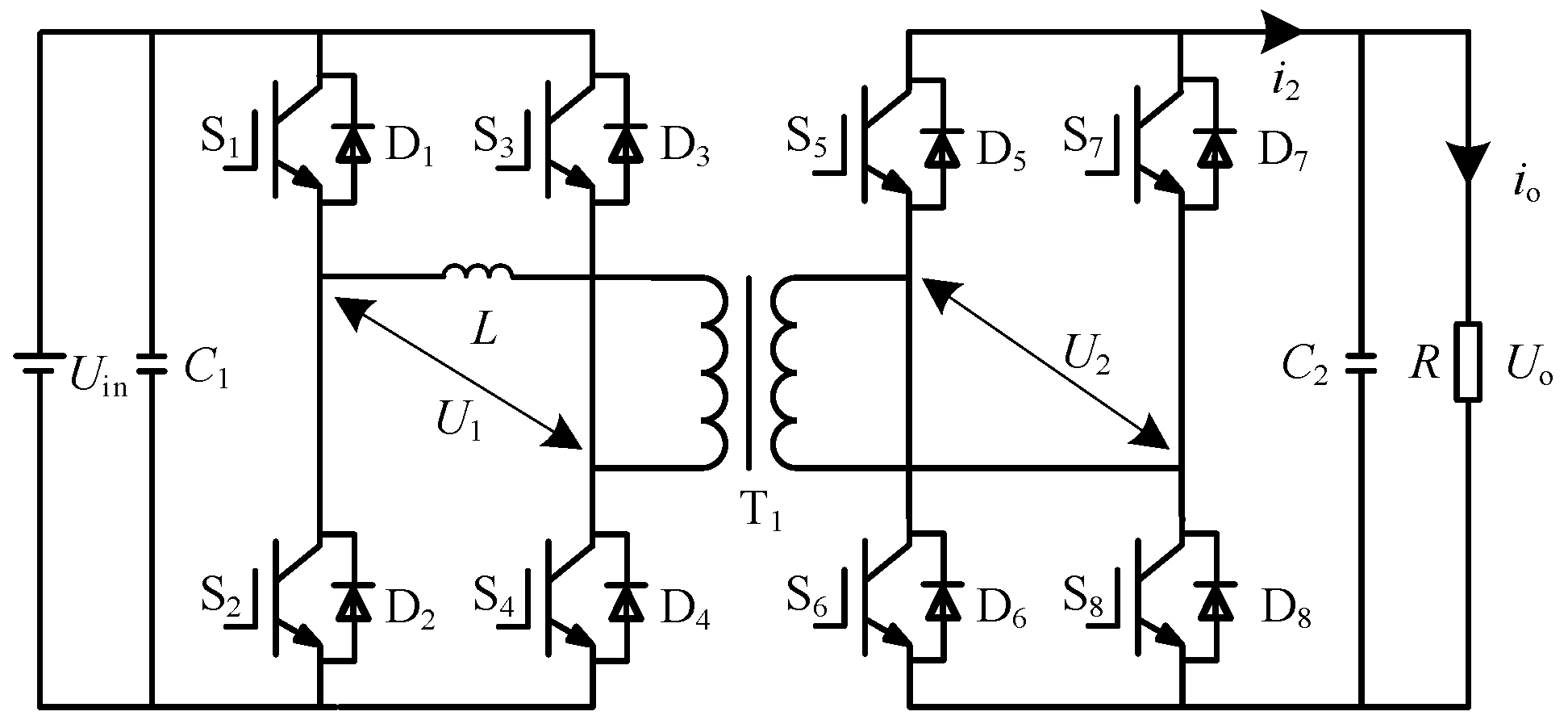
When the DAB converter works normally, the output side capacitance voltage
Uo and inductance current
IL are selected as state variables. In
Figure 2, the differential equation expression of the converter is established according to Kirchhoff’s voltage and current law (2).
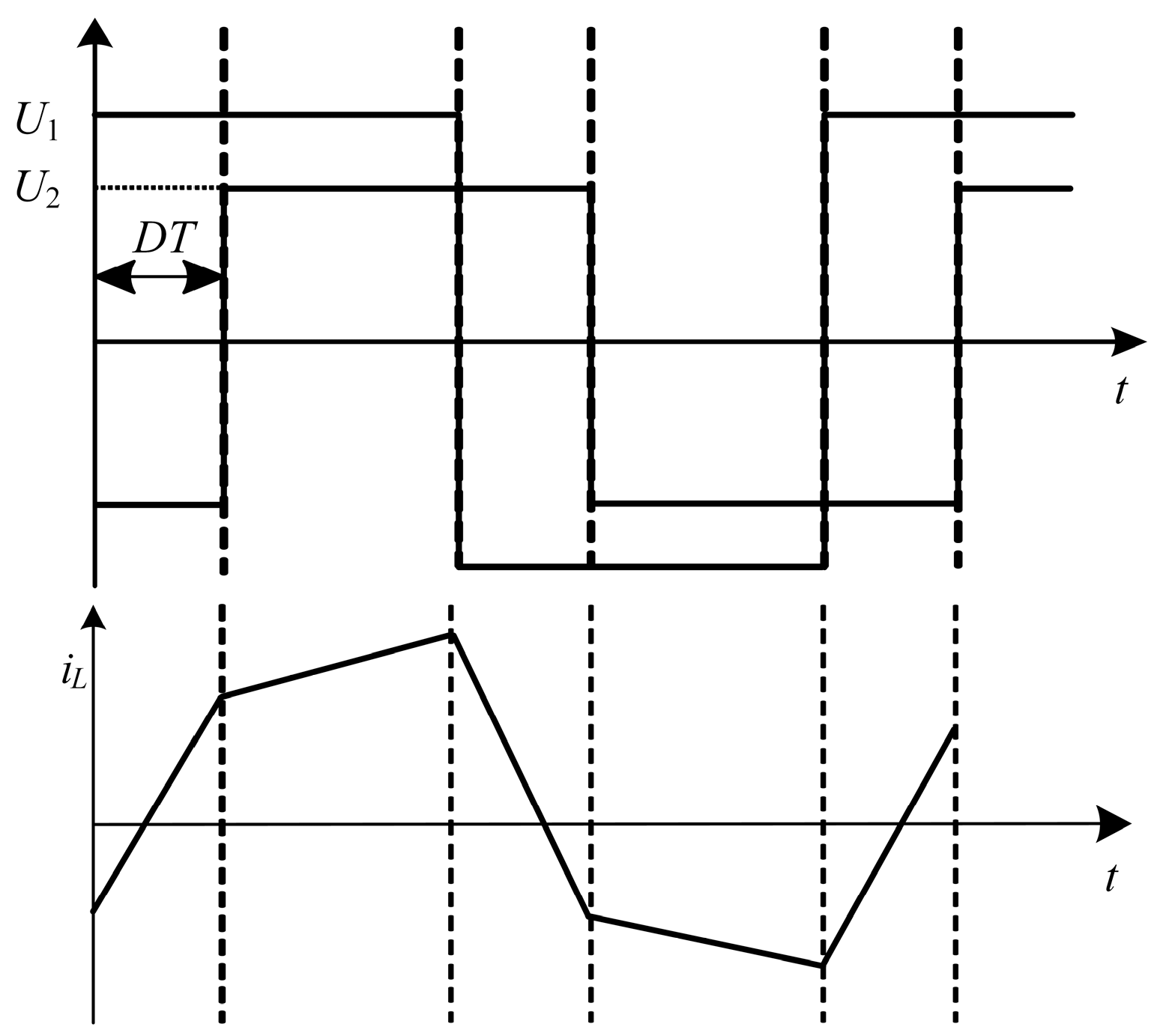
It can be seen from
Figure 3 that the inductance current is a periodic alternating current, and the average value in one switching cycle is 0. In addition, it is known from Equation (1) that after the input and output voltages of the DAB converter are determined, the instantaneous power transmitted is related to the phase shift ratio
D and is not affected by the initial time value of the inductance current
iL. Therefore, the first equation in Equation (2) is selected to establish the first-order dynamic mathematical model of the DAB converter with the output voltage
Uo as the state variable. Equation (2) is written as
In combination with Equation (1), the output current of the converter,
io, can be defined by the following expression:
When the DAB converter is subject to external disturbance, the output power quickly tracks the power transmitted by the system at that time, which can improve the dynamic response speed of the converter. The change in the charge and discharge of the output capacitor can reflect the output voltage [
12]. Therefore, introducing the current at the output side and selecting the capacitor voltage can shorten the dynamic response time.
The first-order dynamic mathematical model (3) of the converter can be written in the form of the matrix equation
where
M is a positive definite diagonal matrix, i.e.,
M =
MT;
J is the antisymmetric matrix of the internal interconnection structure of the system, i.e.,
J = −
JT;
R is the symmetric positive definite matrix of the energy dissipation characteristics of the system, that is,
R =
RT and
R is greater than 0;
x is the system state variable vector; and
u is the system control input vector, reflecting the exchange of energy between the DAB converter system and the external. The expression of each matrix is as follows:
Since J is a 0 matrix and an antisymmetric matrix, Equation (5) has the property of the E-L equation.
4. Passive Backstepping Controller for DAB Converter
Passivity-based control controls the physical quantity of the controlled object from the perspective of energy. Passivity is the energy change attribute of the system. The passive controller can only be designed after the passivity and stability of the DAB converter are proven. After the passive controller of the DAB converter is deduced, to accelerate the tracking speed, the passivity-based control and backstepping control are combined to design a passive backstepping composite controller to improve the response speed of the converter system.
4.1. E-L Passivity of DAB Converter
Consider
m input and
m output systems
where
x ∈
Rn,
u ∈
Rm is the input;
y ∈
Rm is the output, and it is continuous concerning
x; and
f is the (
x,
u) local Leibniz.
For the system defined by Equation (6), if there is continuous differentiable semi-positive definite energy storage function
H(
x) and positive definite function
Q(
x), for any
t > 0, the dissipation inequality
or
If the input u, output y and energy supply rate uTy of the system are satisfied, the system is strictly passive.
Equation (7) or Equation (8) describes the increase in the energy of the above system from time 0 to the current time t, which is less than or equal to the total energy injected from the outside, indicating that the operation of the passive system is always accompanied by energy loss.
Let the energy storage function of the DAB converter system by:
In combination with Equation (5), the derivative of the energy storage function
H for time
Let the output variable
y =
u, then
Integrate both sides of the above formula to obtain:
Since
R is a positive definite diagonal matrix,
xTRx > 0. Thus, there are:
The left side of the inequality (13) is the energy intake of the converter system in this time process, and the right side is the energy externally supplied to the system. The input u and output y of the system and the mapping u → y is strictly passive. Consistent with the definition Formula (8), it can be seen that the DAB converter is strictly passive, the passive controller can be designed, and the system is stable.
4.2. Passive Controller Design
The function of the passive controller is to quickly realize x → xref, where xref is the expected steady-state value of the DAB converter, and in this paper is the output voltage reference value Uoref = 300 V.
Let the error variable
xe =
x −
xref, and the error energy storage function is
For the passive controller of the DAB converter, if He converges to 0 quickly, that is, if He → 0, then xe → 0, the control target can be achieved.
The derivative of the error energy storage function is
To accelerate
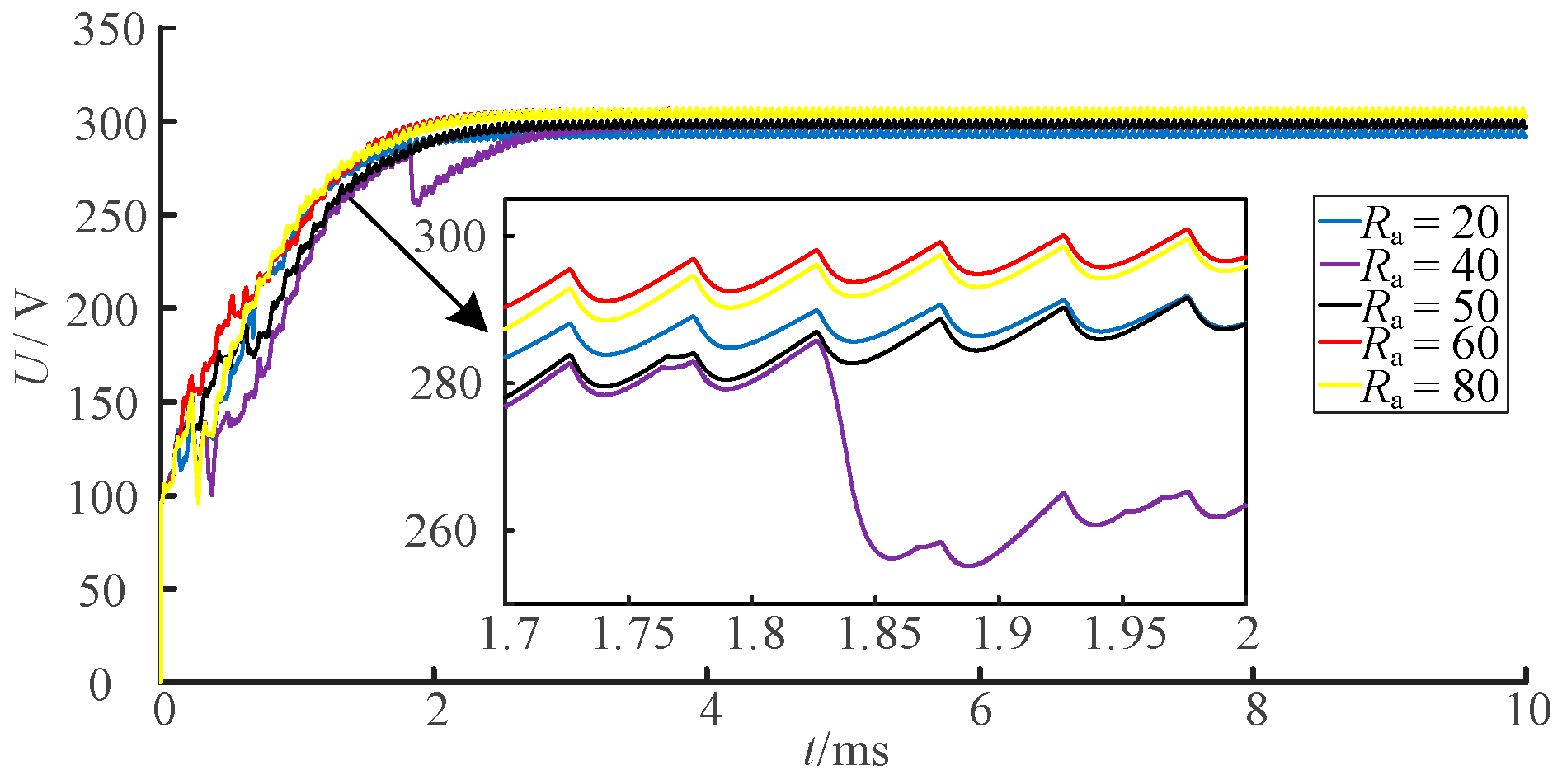
He convergence to 0, damping injection
Ra through simulation can improve the response speed of the converter system and improve the energy dissipation speed of the system. From Formula (5):
where
Rd =
R +
Ra, positive definite diagonal damping matrix
Ra is
By substituting Formula (16) into Formula (15),
To ensure
, the passive controller can be selected as:
The passive controller Formula (19) can make He → 0 (xe → 0). The speed at which he converges to 0 depends on Rd. If Ra ≫ R, the speed at which He → 0 depends on the damping matrix Ra, and R has little effect. When the voltage of the primary side of the converter changes suddenly or the resistance of the secondary side switches, the converter is robust to the change in the load R.
Since
xref is a given reference value, if there is, the passive controller can be simplified as
The passivity-based control equation of the DAB converter of the simultaneous Formula (4) is:
When transmitting power in the forward direction,
When power is transmitted in reverse,
The control rate of the passive controller with phase shift ratio
D is:
4.3. Design of Passive Backstepping Controller
The fast-tracking performance of the output voltage is lost during the design of the DAB converter passive controller [
20]. In order to compensate for this deficiency, the dynamic response performance of the converter is improved by introducing backstepping control based on the design of the DAB converter passive controller.
Transform Equation (3) into
where
x =
Uo.
Let the output voltage error of the converter be:
In order to realize the converter control target
a → 0, the Lyapunov function of a is defined as
Derive the upper equation with time in parallel with vertical (14), and the state abnormal reference value will be zero after derivation to obtain the first derivative of Lyapunov.
The linear quantity
ka is introduced to improve the dynamic response performance of the converter. Define the value of the control quantity
i2
where
k is the feedback gain greater than 0. The final backstepping control equation of the DAB converter is
Combine vertical (22) and Equation (32) to obtain the passive backstepping control rate of the DAB converter based on the E-L model.
When power is transmitted in the forward direction,
When power is transmitted in reverse,
Finally, the phase shift ratio
D based on passive backstepping control is
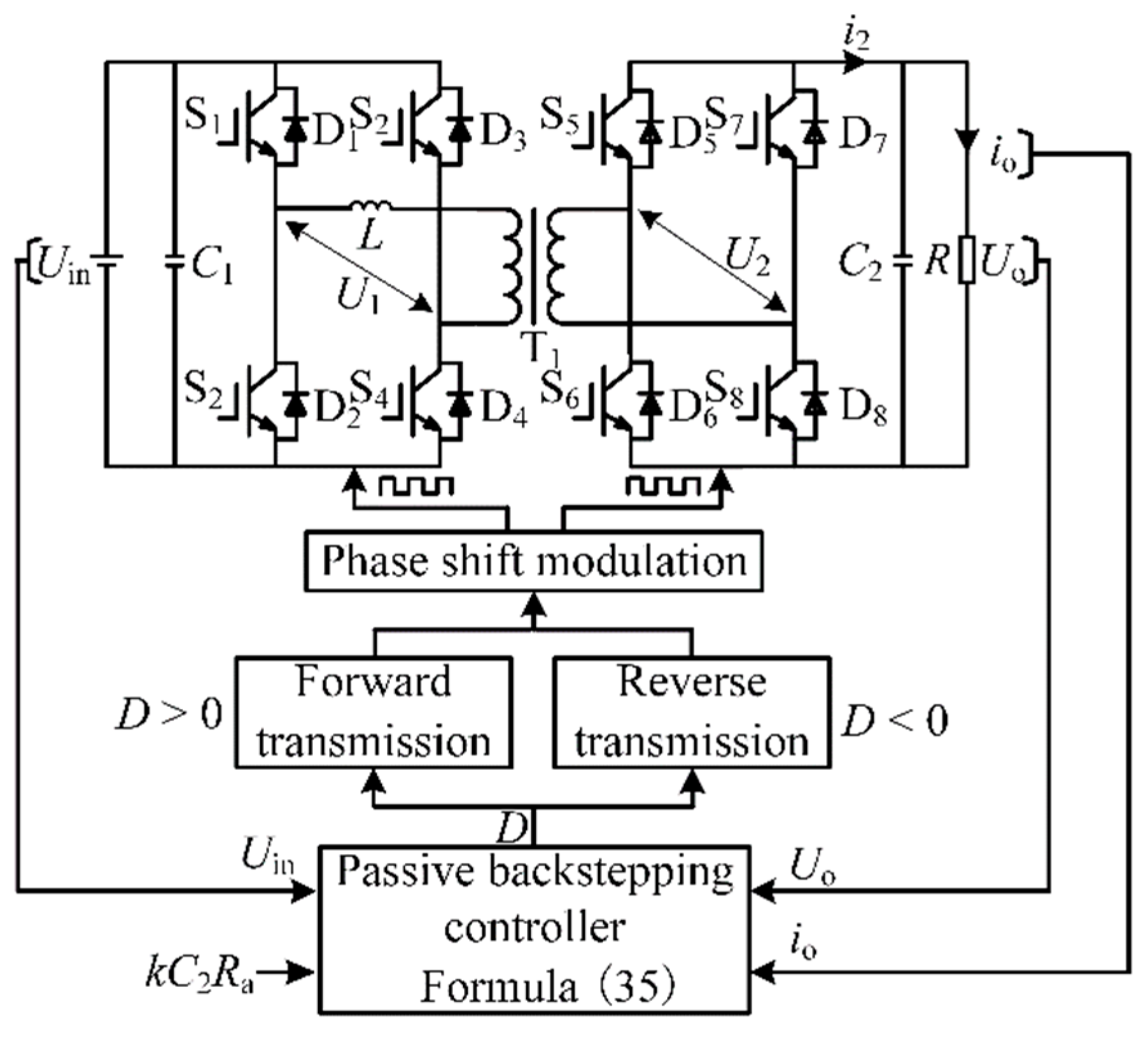
According to the above analysis, the block diagram of the overall control system of the DAB converter based on passivity-based control is shown in
Figure 4. Firstly, physical quantities such as the output voltage, current and input voltage of the DAB converter are collected and input to the passive backstepping controller; secondly, the phase shift compared to
D of the converter is calculated according to expression (35), and according to the magnitude of the phase shift compared to
D, the magnitude and direction of the transmitted power of the DAB converter is determined. Finally, after the phase shift modulation, a square wave is generated to drive the on and off of the switching tubes. When the appropriate injection damping
Ra is selected, the output voltage
Uo can quickly converge to the reference voltage
Uoref.
6. Conclusions
This paper investigated the dual active bridge converter in the output stage of a modular three-port DC converter to address the problems of slow dynamic response and weak robustness under conventional control. In order to improve the dynamic response of the output voltage of the DAB converter and verify the reverse power transfer of the converter under the passive backstepping control strategy, this paper combined the passivity-based control of the E-L model with backstepping control to the control of the DAB converter, constructed an energy storage function to verify that the converter is strictly passive, and ensured the global stability of the system by injecting damping. The addition of backstepping control eliminates external error and provides good dynamic performance. The feasibility and stability of the passive backstepping control strategy are verified by simulation, and the results show the following:
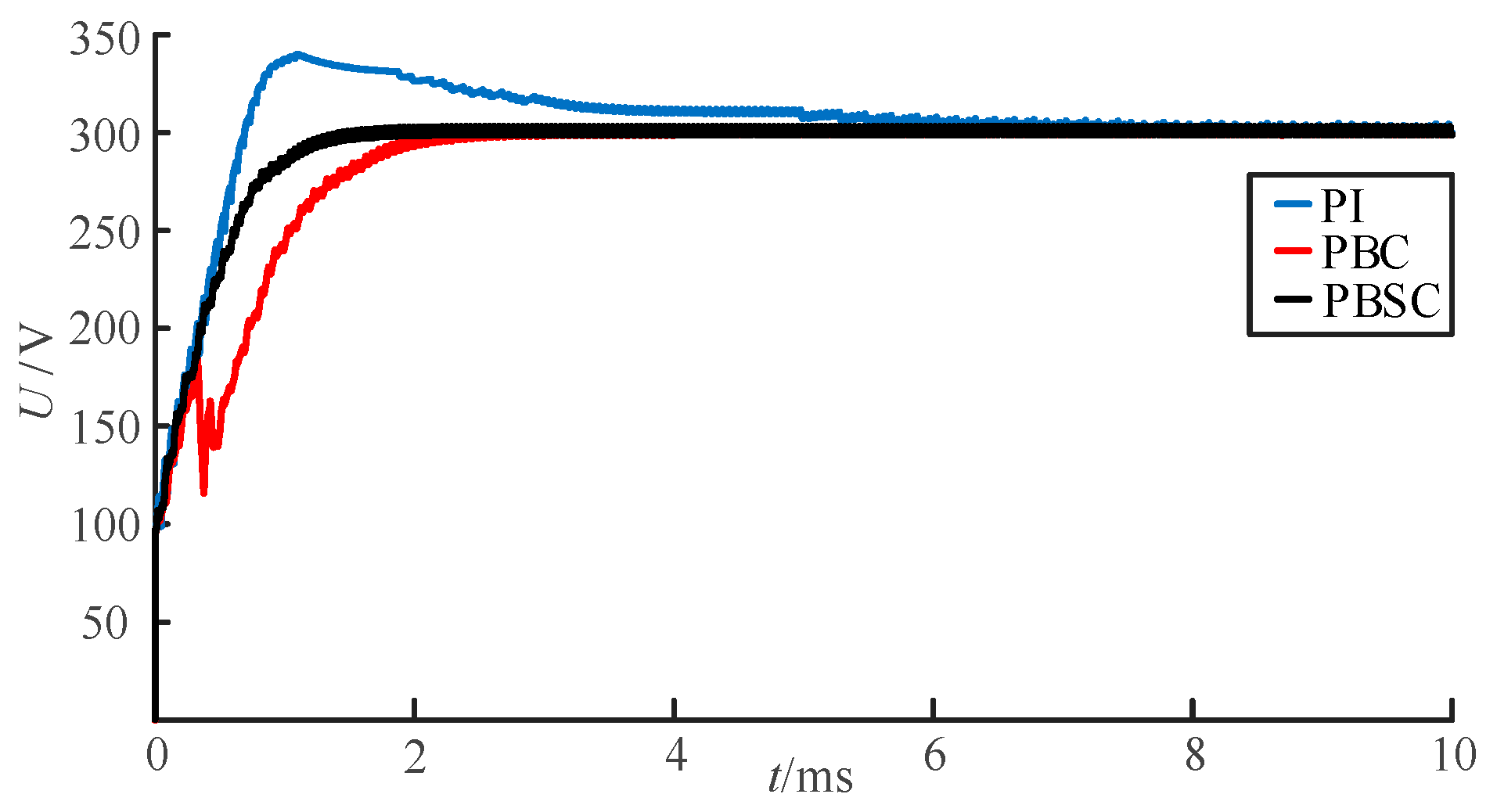
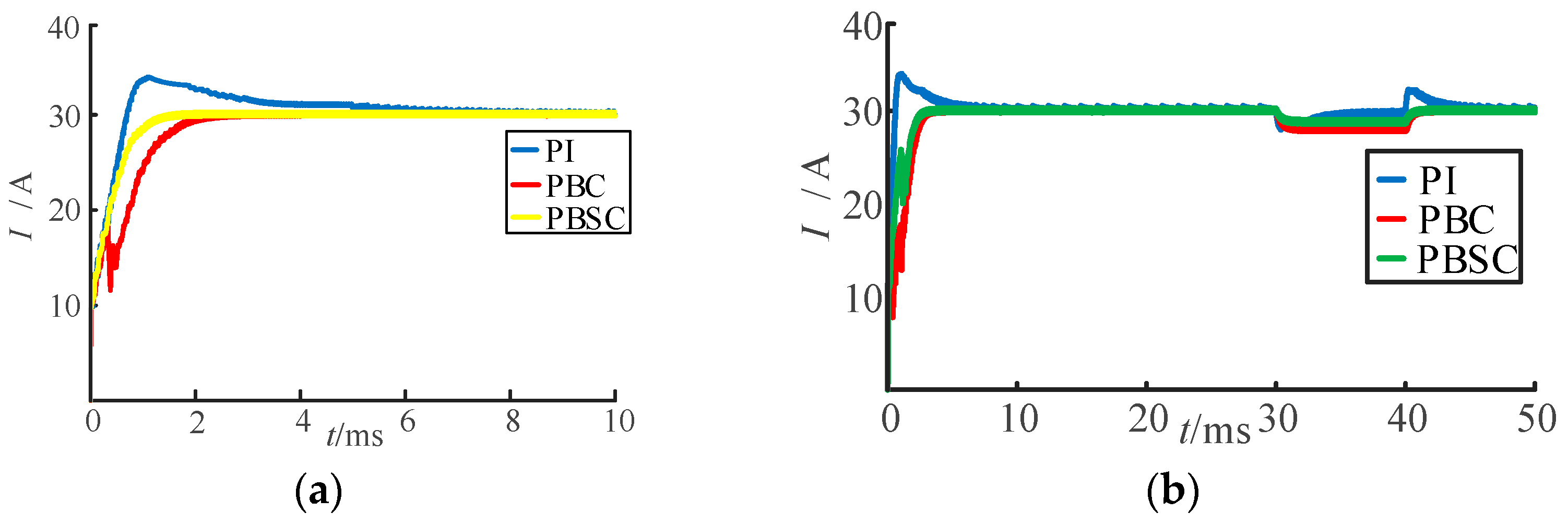
(1) The passive backstepping control strategy is more suitable for this type of nonlinear system of DAB converter than the traditional PI control and passivity-based control monotypic control methods, and the dynamic response is fast, the output voltage reference value is quickly tracked, and the overall control performance is better.
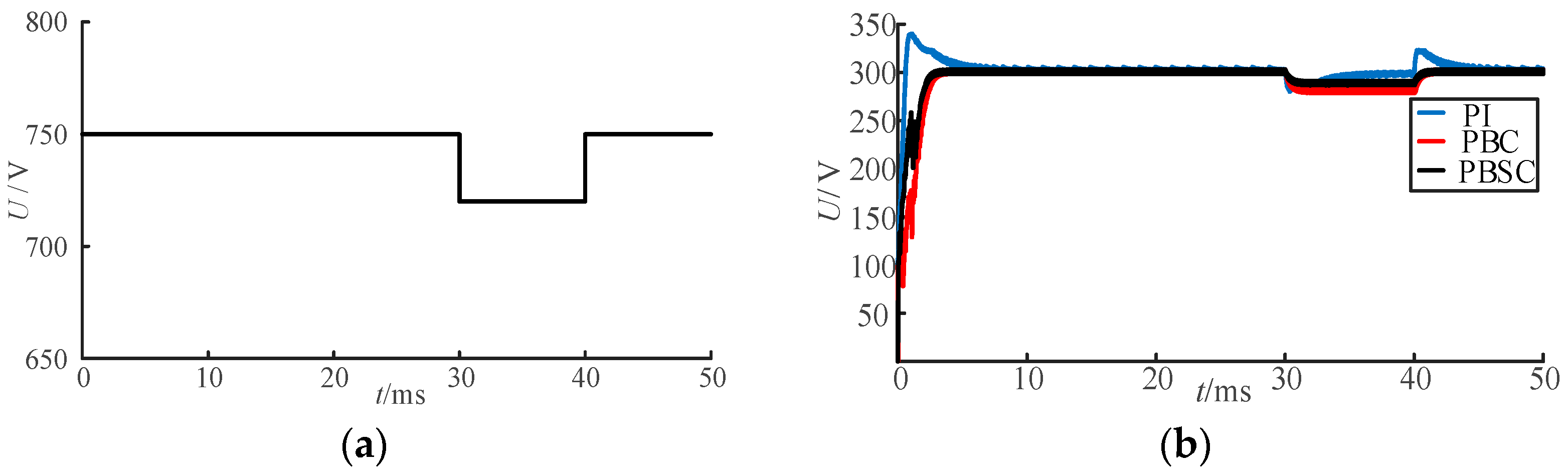
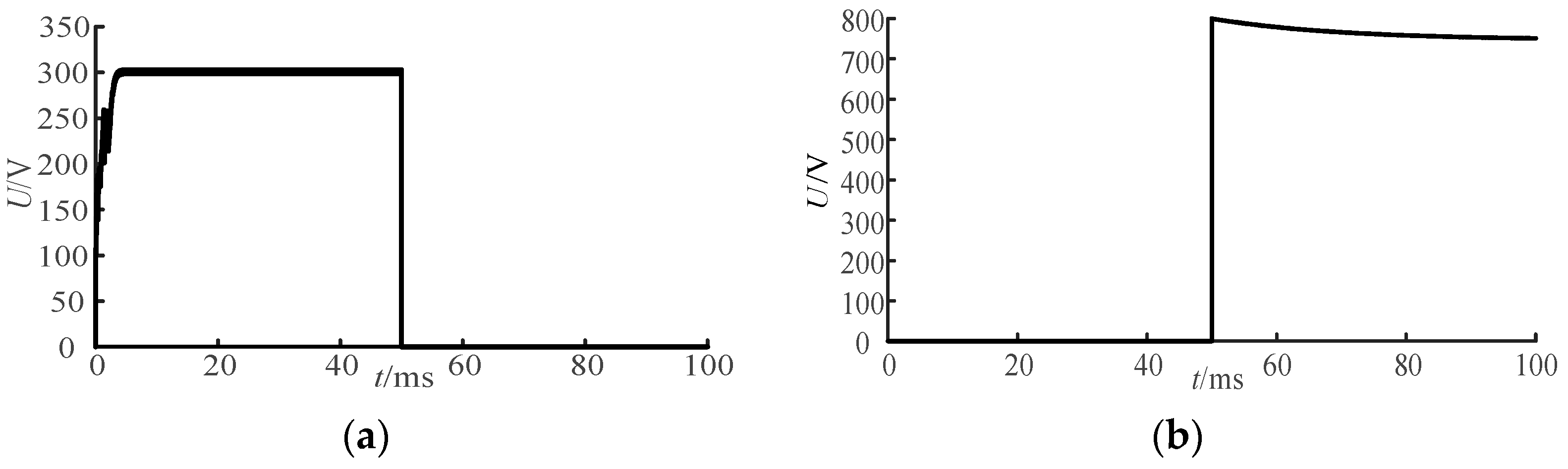
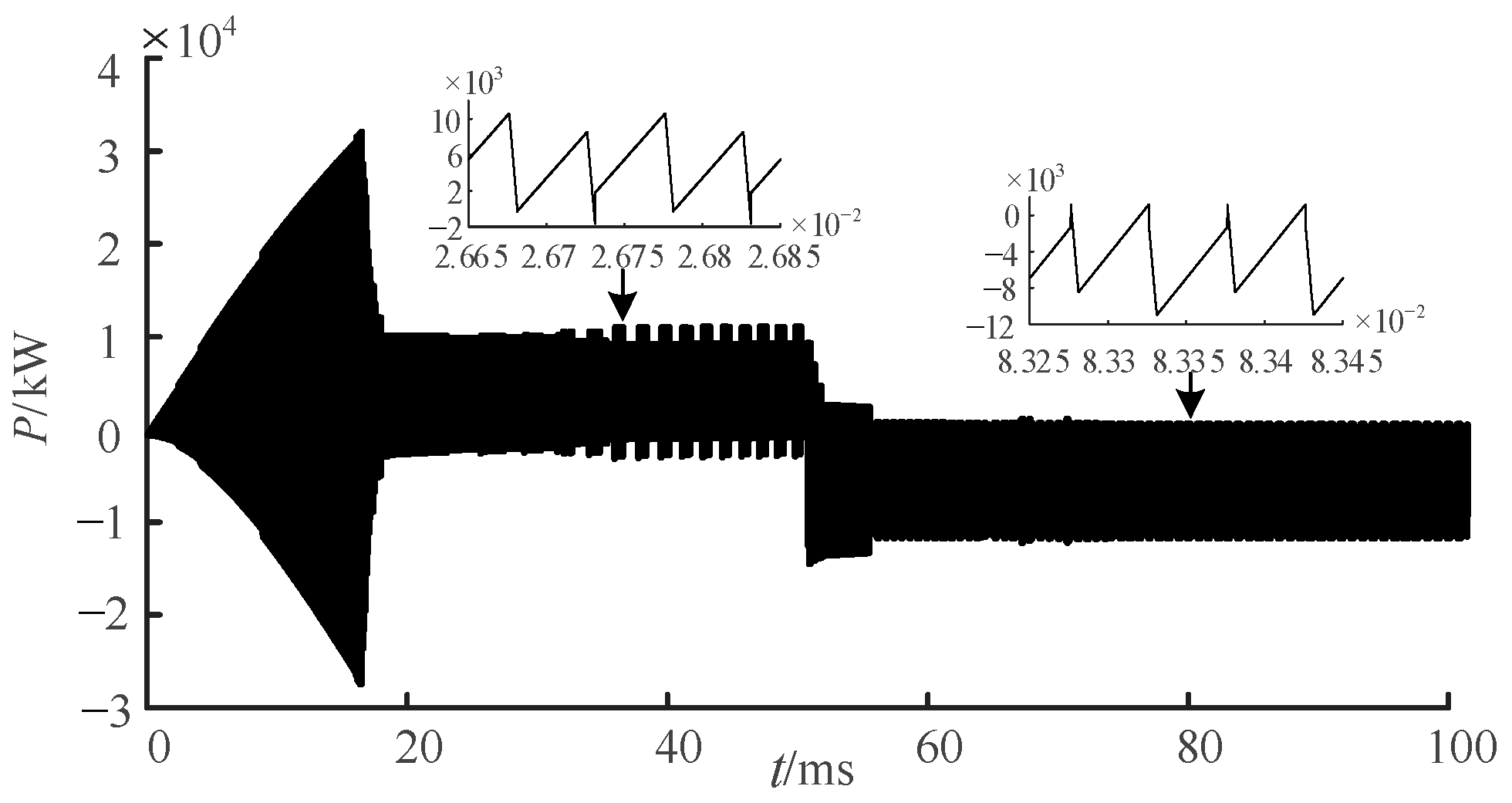
(2) The DAB converter can quickly reach a new operating state and maintain a stable output voltage in the event of sudden changes in the input voltage of distributed power supplies, smoothing out fluctuations in the output power of renewable energy sources such as photovoltaic and wind power generation, and significantly improves the converter’s anti-interference capability.
(3) With the same number of power electronics, the passive backstepping-based control is easy to design and reduces the hardware cost of the system, and the reduction in the number of sensors can effectively improve the economy.
(4) It is verified that the DAB converter is applied to the railway traction power supply system, and the passive backstepping control strategy switches the forward and reverse power transfer modes of the converter to reverse the power transfer and recover the regenerative braking energy on the secondary side, broadening its application scenario.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}