
State Feedback and Deadbeat Predictive Repetitive Control of Three-Phase Z-Source Inverter
Abstract
:1. Introduction
2. Three-Phase Z-Source Inverter Modeling
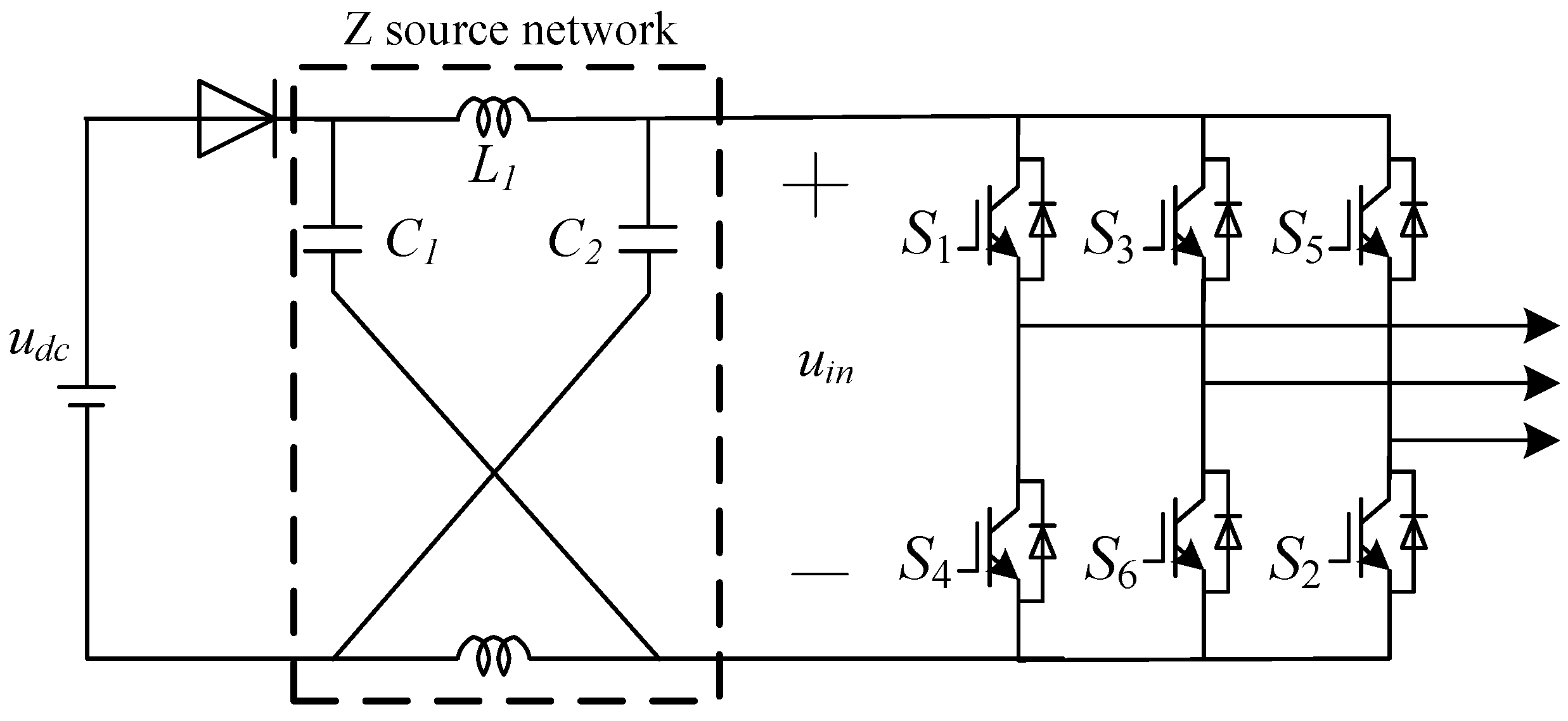
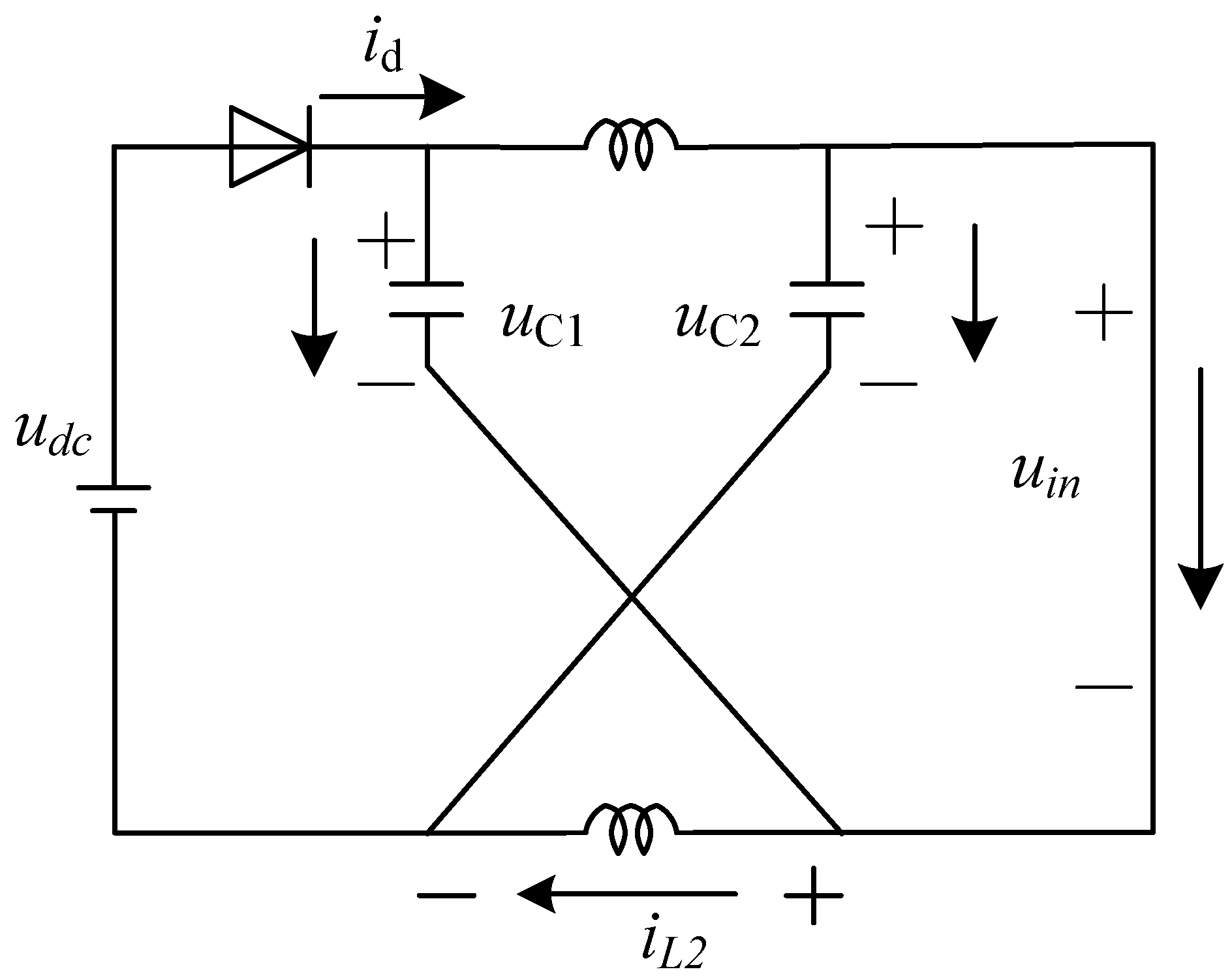
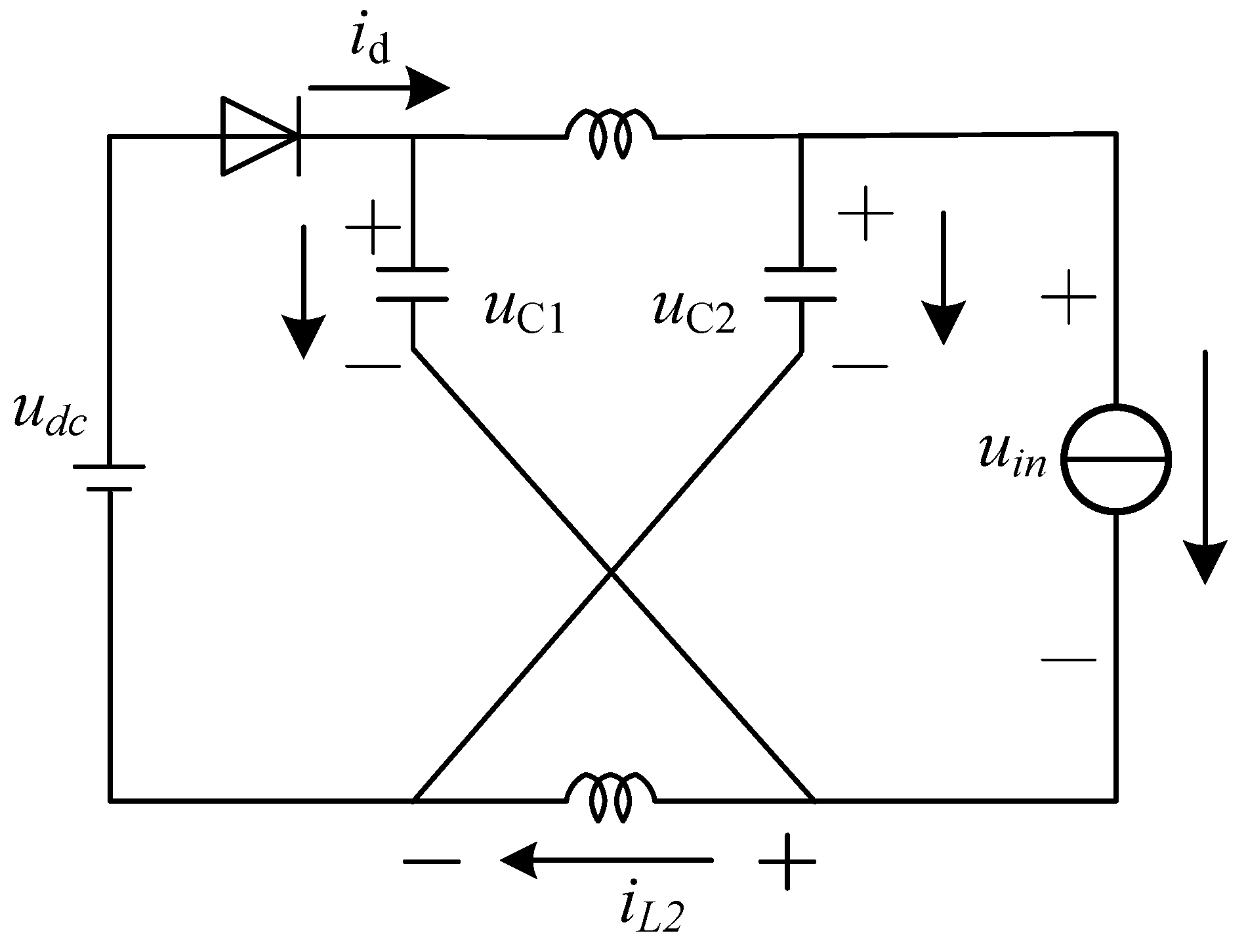
2.1. Fundamentals of Z-Source Inverters
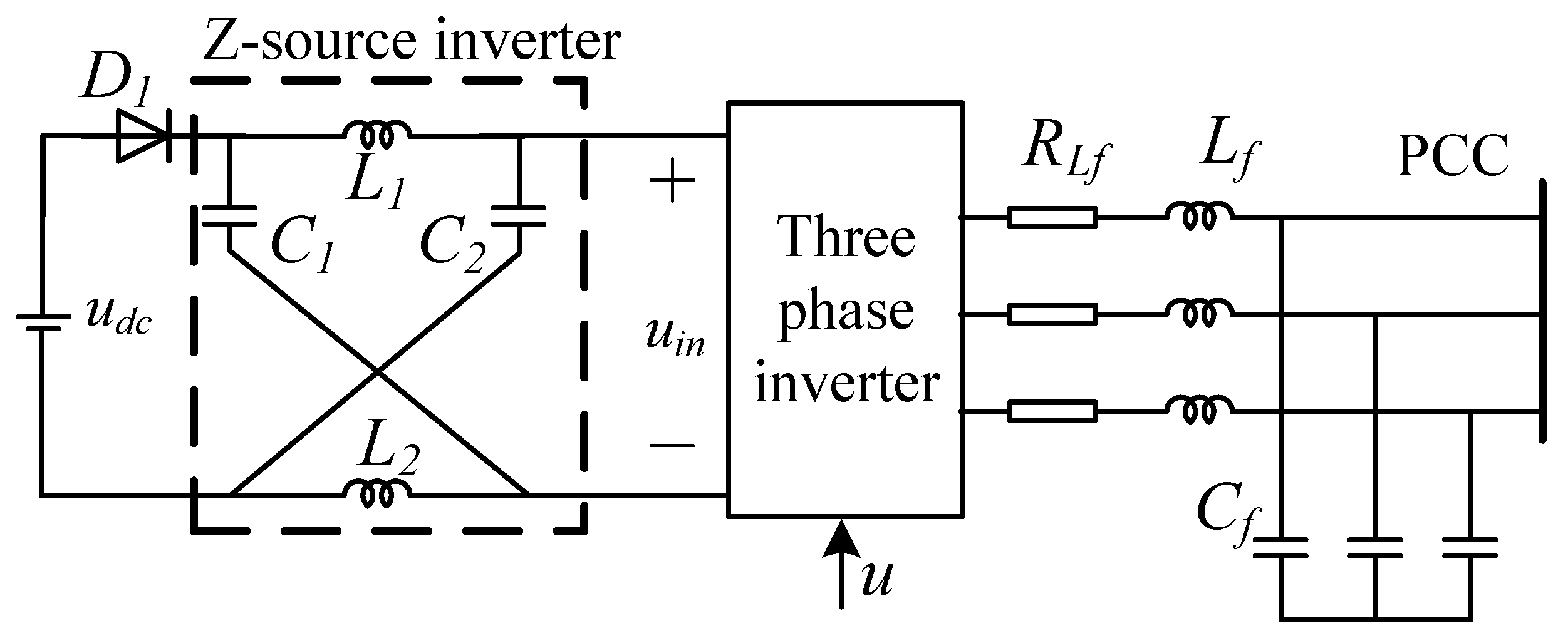
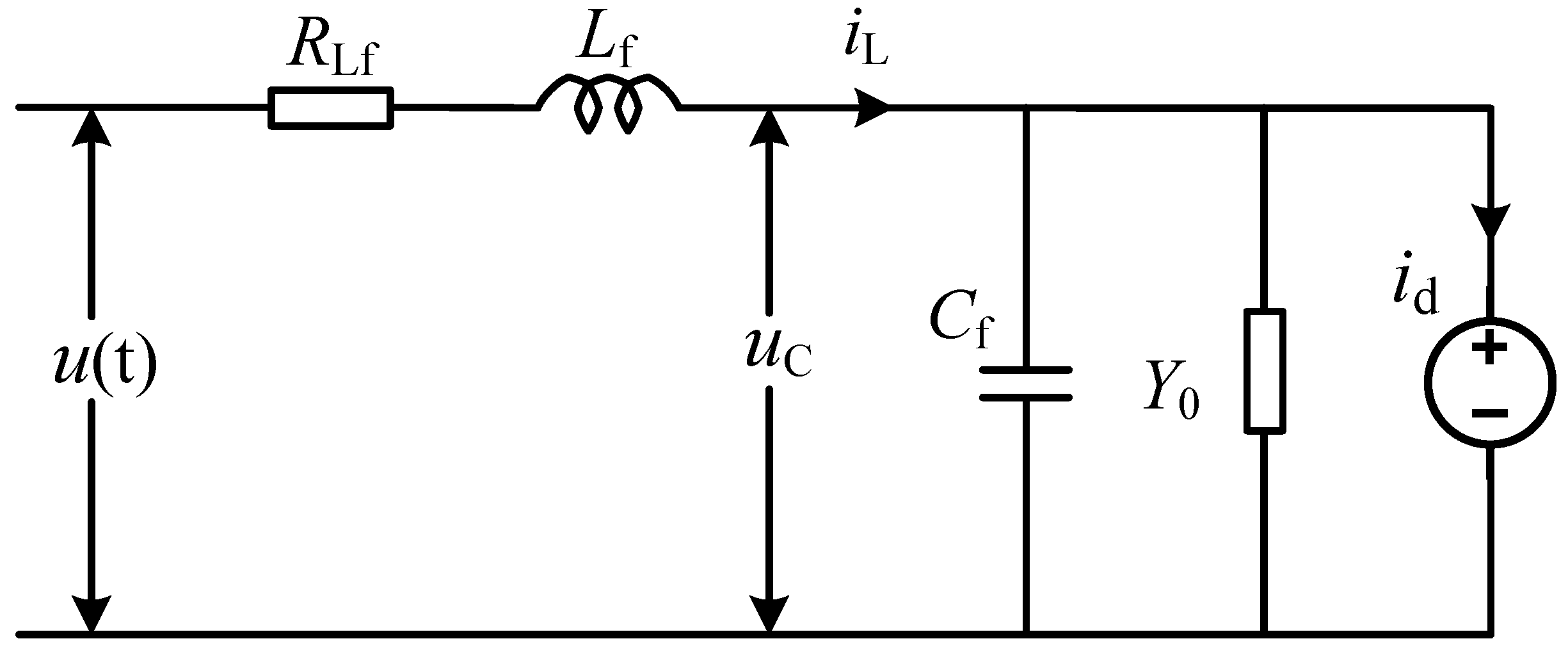
2.2. Modeling of Three-Phase Z-Source Inverter
3. Controller Design
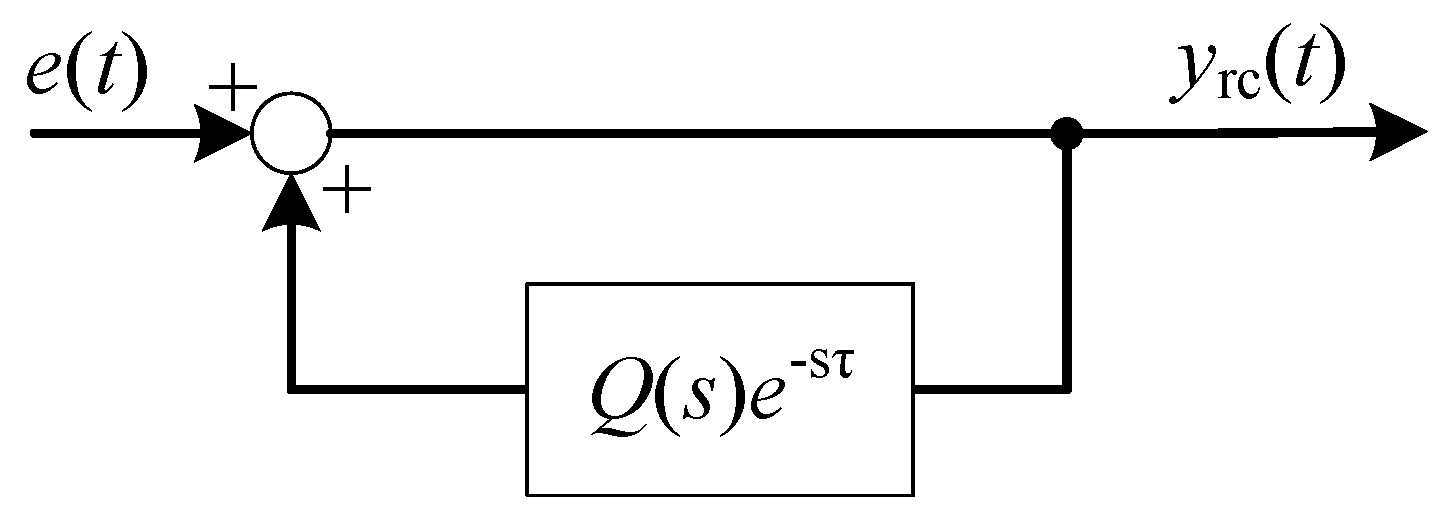
3.1. Design of Repetitive Controller
3.2. Design of State Feedback Controller
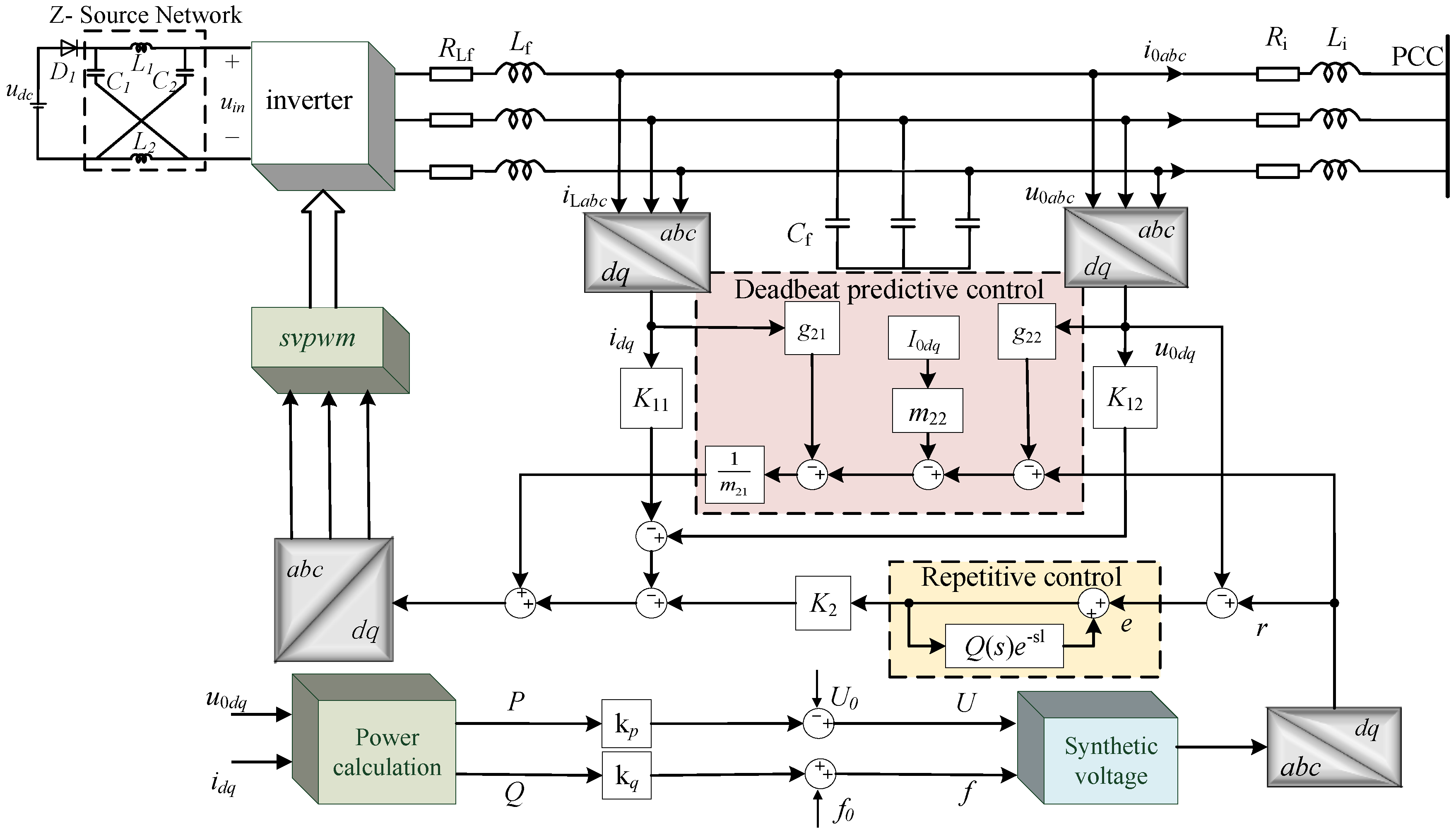
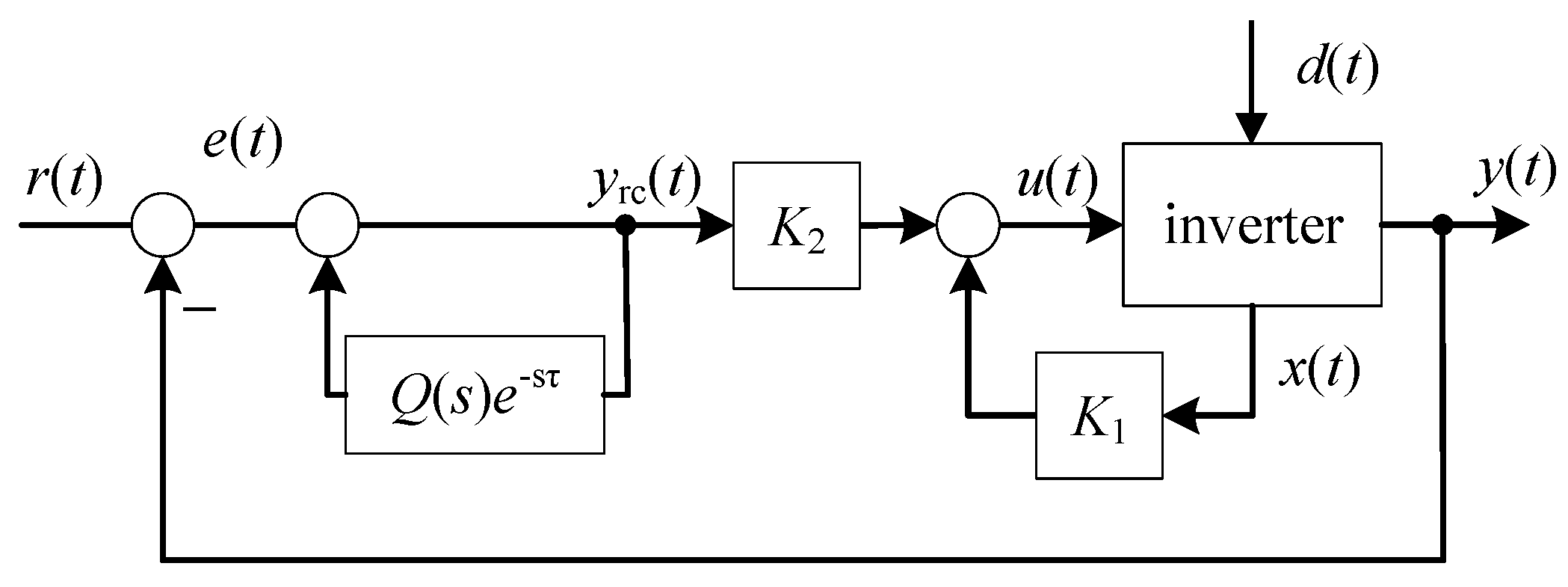
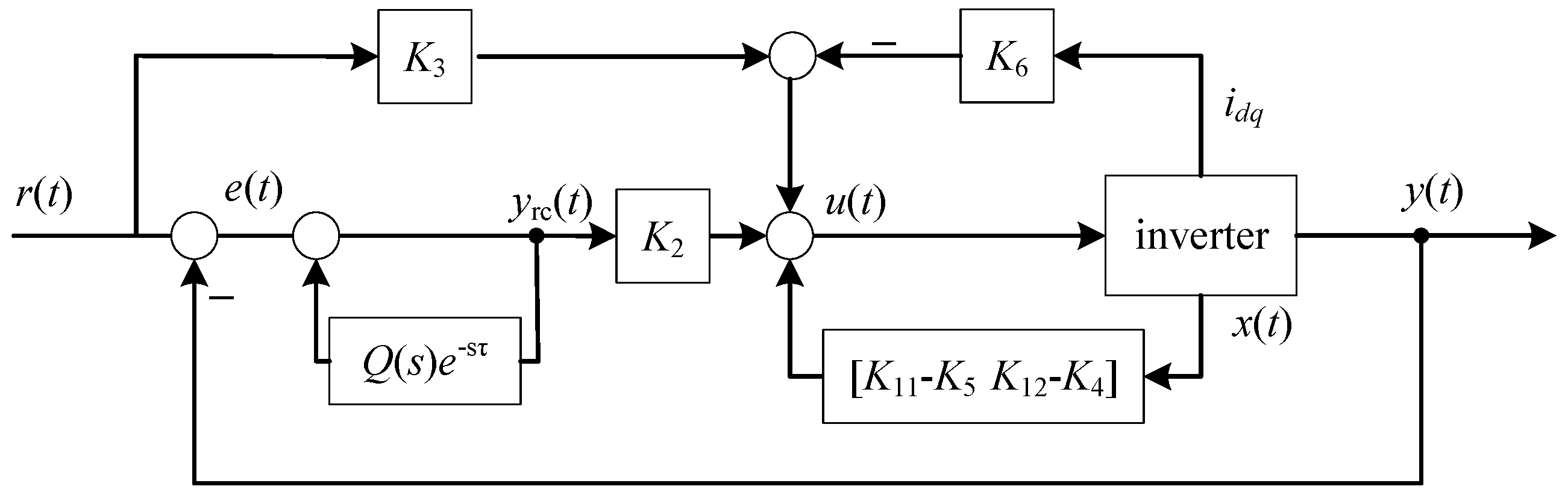
3.3. State Feedback Deadbeat Predictive Repetitive Control
4. Simulation and Experimental Verification
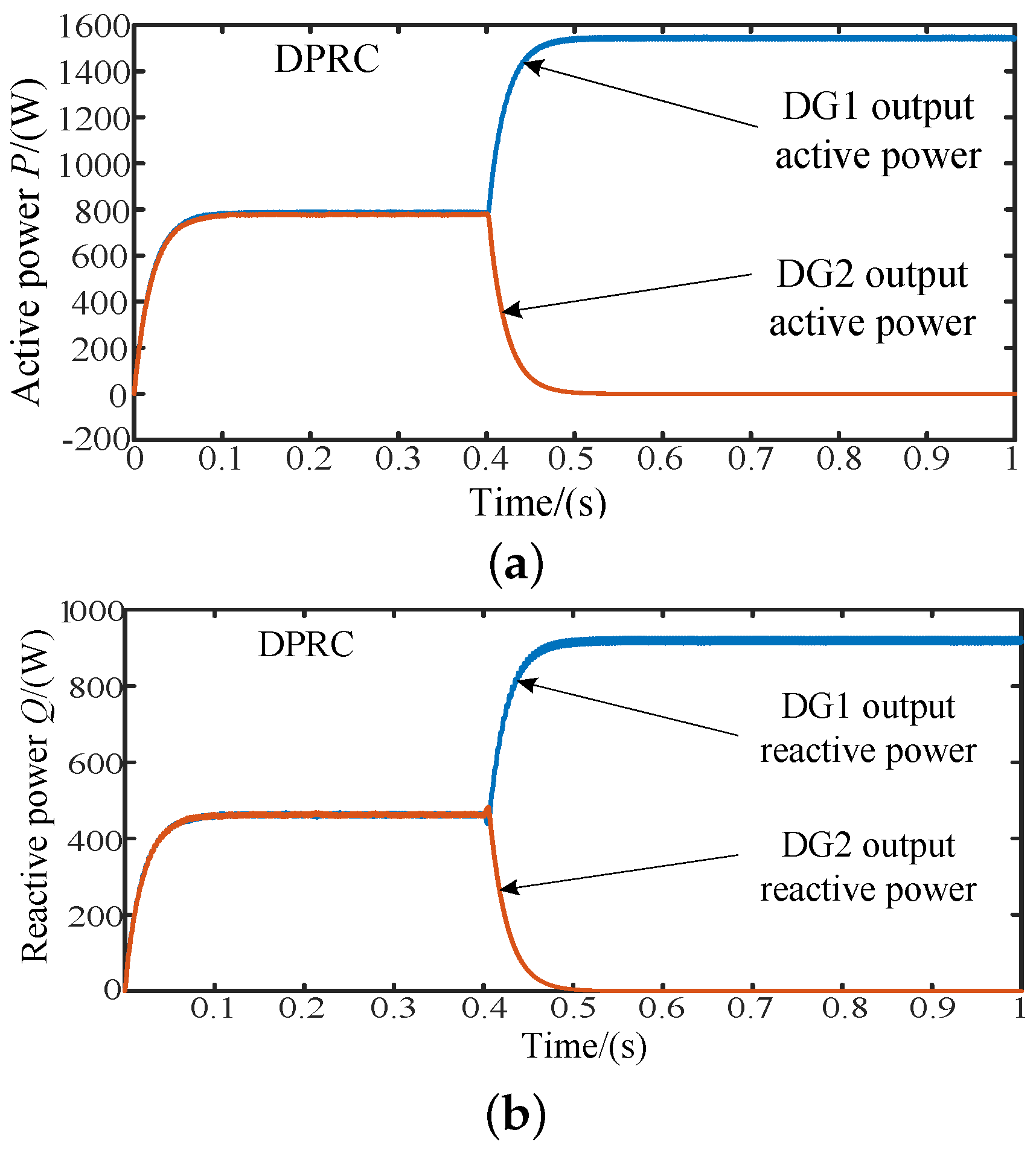
4.1. Simulation Results
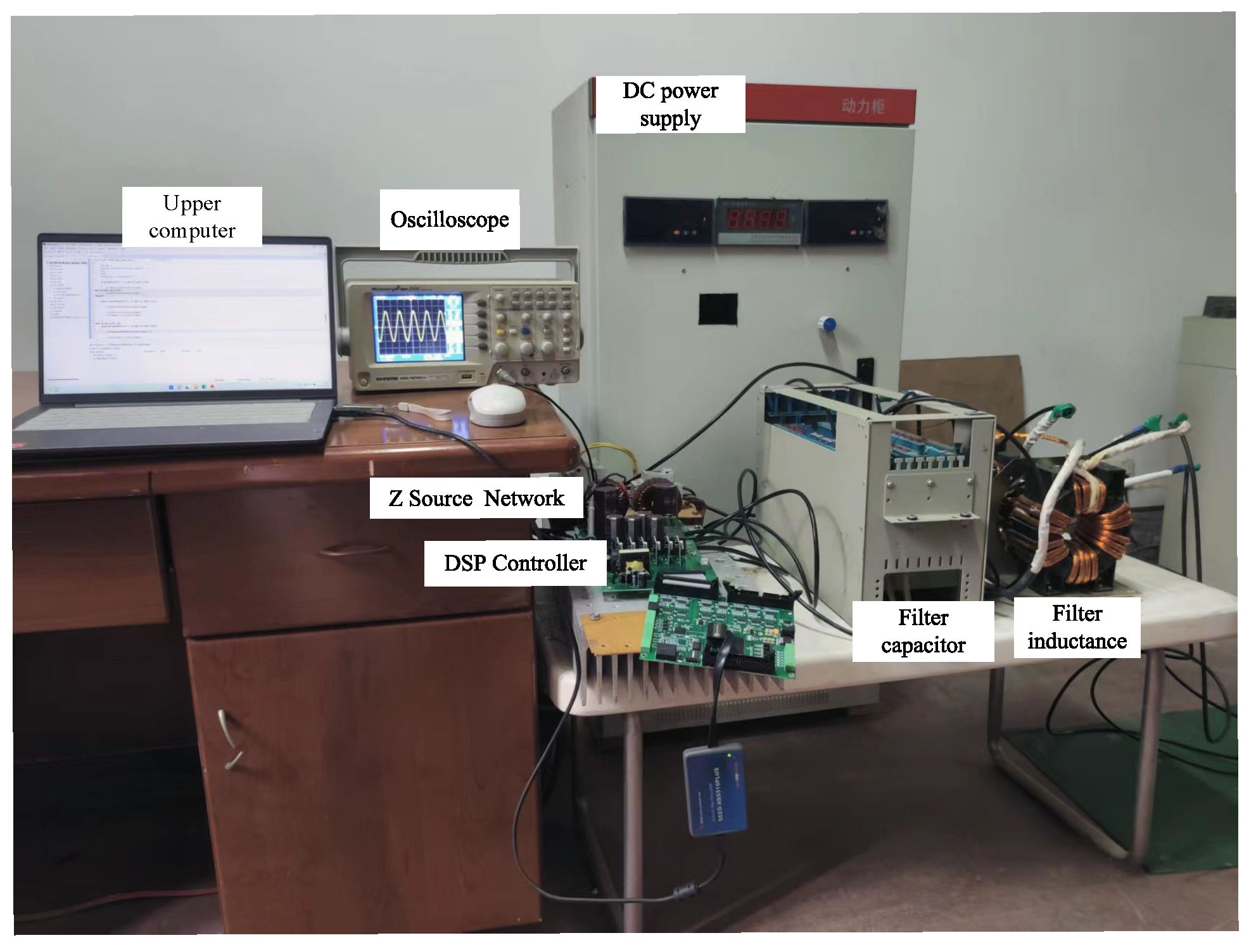
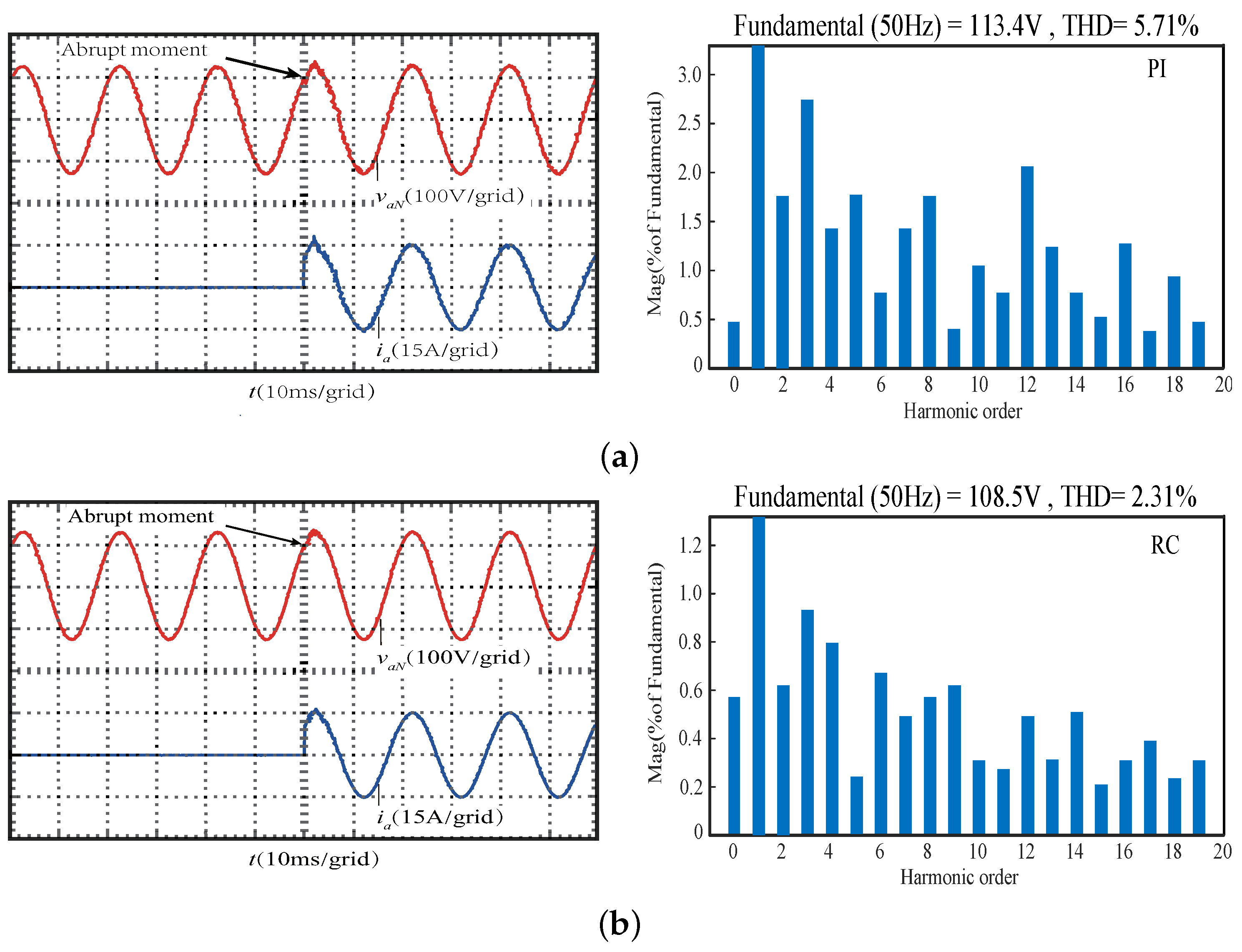
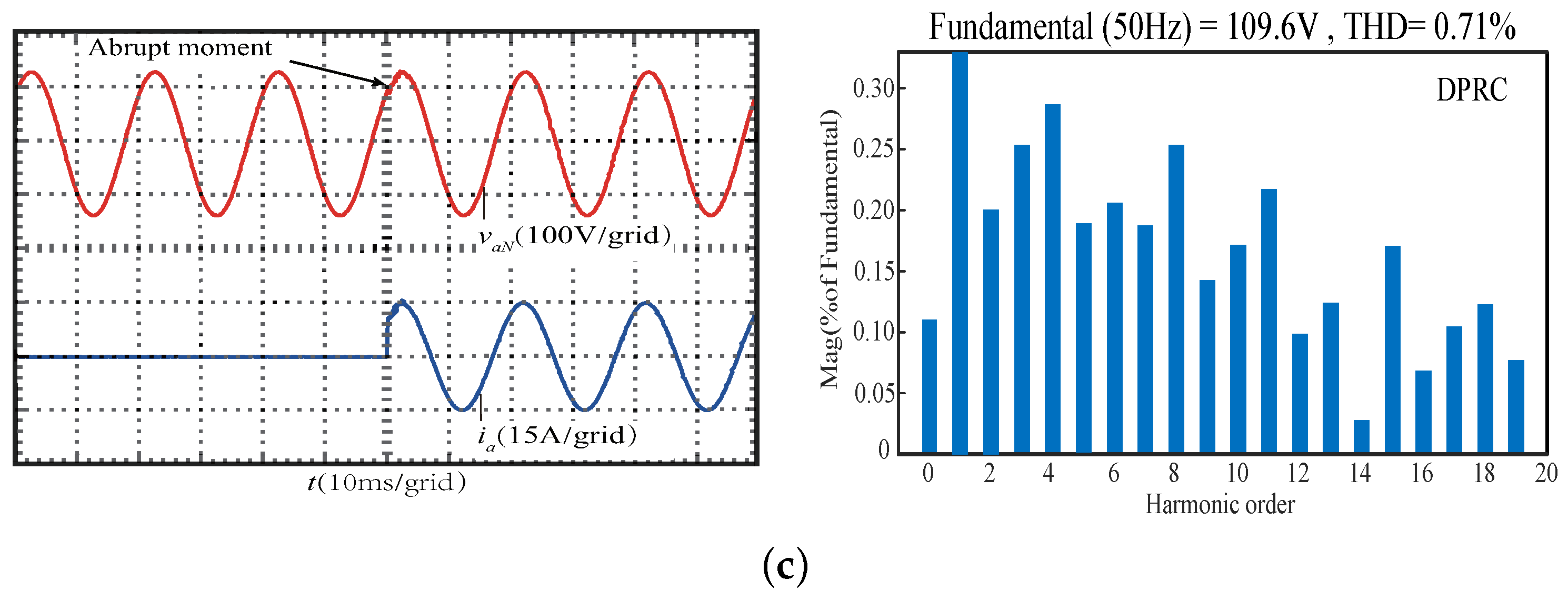
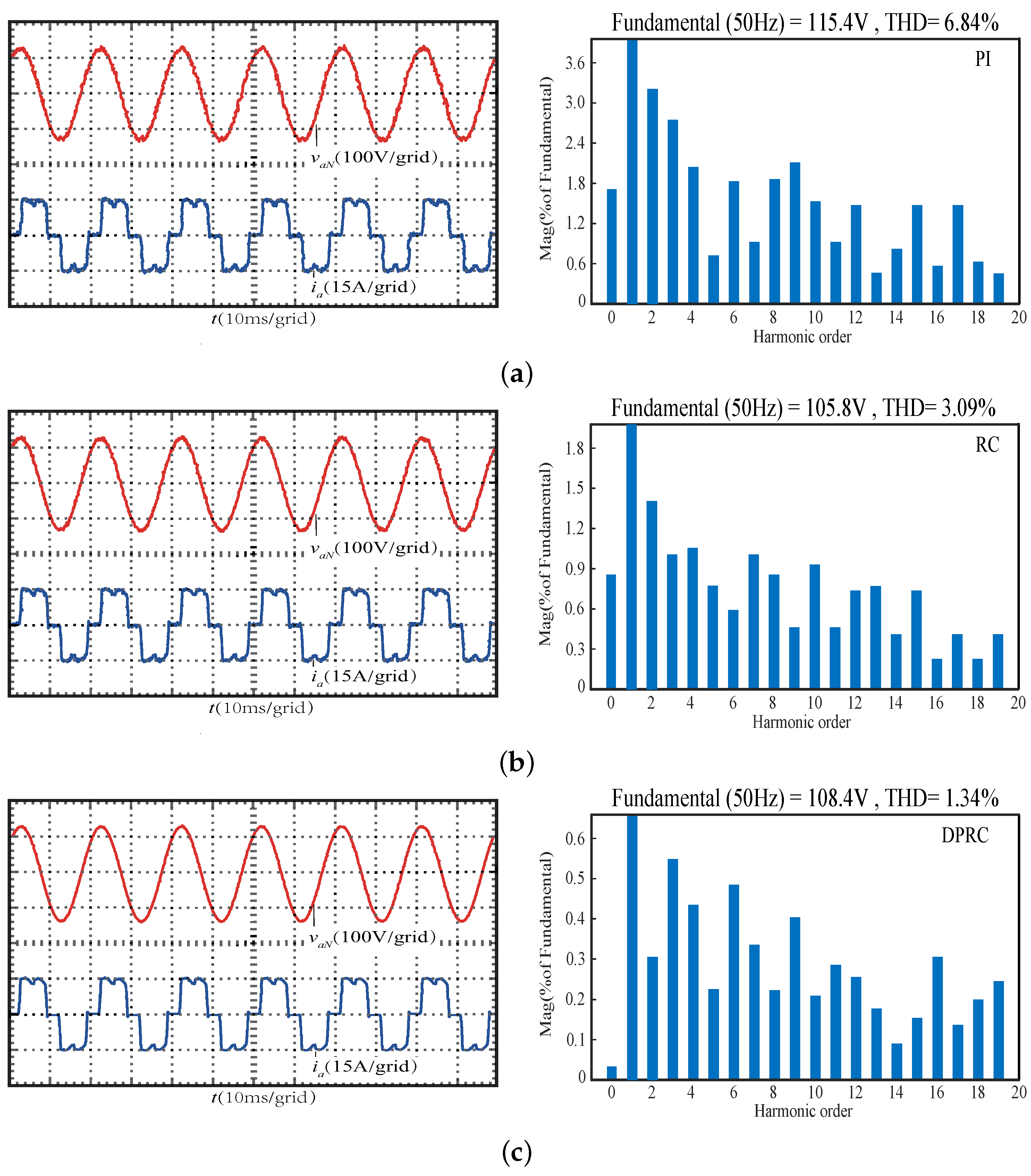
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hossain, M.A.; Pota, H.R.; Issa, W.; Hossain, M.J. Overview of AC microgrid controls with inverter-interfaced generations. Energies 2017, 9, 1300. [Google Scholar] [CrossRef]
- Peng, Y.; Shuai, Z.; Liu, X.; Li, Z.; Guerrero, J.M.; Shen, Z.J. Modeling and stability analysis of inverter-based microgrid under harmonic conditions. IEEE Trans. Smart Grid 2019, 2, 1330–1342. [Google Scholar] [CrossRef]
- Perera, B.; Ciufo, P.; Perera, S. Advanced point of common coupling voltage controllers for grid-connected solar photovoltaic (PV) systems. Renew. Energy 2016, 86, 1037–1044. [Google Scholar] [CrossRef] [Green Version]
- Hajizadeh, M.; Fathi, S.H. Fundamental frequency switching strategy for grid-connected cascaded H-bridge multilevel inverter to mitigate voltage harmonics at the point of common coupling. IET Power Electron. 2016, 12, 2387–2393. [Google Scholar] [CrossRef]
- Ellabban, O.; Abu-Rub, H. Z-source inverter: Topology improvements review. IEEE Ind. Electron. Mag. 2016, 1, 6–24. [Google Scholar] [CrossRef]
- Subhani, N.; Kannan, R.; Mahmud, A.; Blaabjerg, F. Z-source inverter topologies with switched Z-impedance networks: A review. IET Power Electron. 2021, 4, 727–750. [Google Scholar] [CrossRef]
- Kumar, R.; Kannan, R.; Singh, N.S.S.; Abro, G.E.M.; Mathur, N.; Baba, M. An efficient design of high step-up switched Z-Source (HS-SZSC) DC-DC converter for grid-connected inverters. Electronics 2022, 15, 2440. [Google Scholar] [CrossRef]
- Selvaraj, J.; Rahim, N.A. Multilevel inverter for grid-connected PV system employing digital PI controller. IEEE Trans. Ind. Electron. 2008, 1, 149–158. [Google Scholar] [CrossRef]
- Tavazoei, M.S. From traditional to fractional PI control: A key for generalization. IEEE Ind. Electron. Mag. 2012, 3, 41–51. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, X.; Zhang, J.; Xu, D. A new feedback method for PR current control of LCL-filter-based grid-connected inverter. IEEE Trans. Ind. Electron. 2010, 6, 2033–2041. [Google Scholar] [CrossRef]
- Zhang, N.; Tang, H.; Yao, C. A systematic method for designing a PR controller and active damping of the LCL filter for single-phase grid-connected PV inverters. Energies 2014, 6, 3934–3954. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Chen, X.; Xiang, B.; Wang, X. Periodic Signal Suppression in Position Domain Based on Repetitive Control. Electronics 2022, 24, 4069. [Google Scholar] [CrossRef]
- Fei, J.; Chu, Y. Double hidden layer output feedback neural adaptive global sliding mode control of active power filter. IEEE Trans. Power Electron. 2019, 3, 3069–3084. [Google Scholar] [CrossRef]
- Davari, S.A.; Khaburi, D.A.; Kennel, R. An improved FCS–MPC algorithm for an induction motor with an imposed optimized weighting factor. IEEE Trans. Power Electron. 2011, 3, 1540–1551. [Google Scholar] [CrossRef]
- Xiong, P.; Sun, D. Backstepping-based DPC strategy of a wind turbine-driven DFIG under normal and harmonic grid voltage. IEEE Trans. Power Electron. 2015, 6, 4216–4225. [Google Scholar] [CrossRef]
- Gao, N.; Chen, X.; Wu, W.; Li, X.; Blaabjerg, F. Finite control set model predictive control with model parameter correction for power conversion system in battery energy storage applications. IEEJ Trans. Electr. Electron. Eng. 2020, 15, 1109–1120. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, L.; Zhang, Y. Model predictive current control for PMSM drives with parameter robustness improvement. IEEE Trans. Power Electron. 2018, 5, 5124–5133. [Google Scholar] [CrossRef]
- Jussi, K.; Jarno, K.; Arko, H. Plug-in identification method for an LCL filter of a grid converter. IEEE Trans. Ind. Electron. 2018, 8, 6270–6280. [Google Scholar]
- Ghanes, M.; Trabelsi, M.; Abu-Rub, H.; Ben-Brahim, L. Robust adaptive observer-based model predictive control for multilevel flying capacitors inverter. IEEE Trans. Ind. Electron. 2016, 12, 7876–7886. [Google Scholar] [CrossRef]
- Cao, R.; Low, K.S. A repetitive model predictive control approach for precision tracking of a linear motion system. IEEE Trans. Ind. Electron. 2009, 6, 1955–1966. [Google Scholar]
- Flores, J.V.; Pereira, L.F.A.; Bonan, G.; Coutinho, D.F.; da Silva, J.M.G., Jr. A systematic approach for robust repetitive controller design. Control Eng. Pract. 2016, 54, 214–222. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Maximum admittance/S | 0.2 |
| Minimum admittance/S | 0.0001 |
| Damping resistance | 1000 |
| Filter inductance / | 0.6 |
| Damping resistance | 154 |
| Filter capacitor | 1500 |
| Damping resistance | 0.01 |
| DC bus voltage/V | 400 |
| Switching frequency f/ | 21.6 |
| Parameter | Value |
|---|---|
| Rated frequency/Hz | 50 |
| Filter parameters | |
| Line impedance/ | 1.276 + j0.0146 |
| Voltage amplitude/V | 110 |
| Droop coefficient | , |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, F.; Xie, W.; Yan, J. State Feedback and Deadbeat Predictive Repetitive Control of Three-Phase Z-Source Inverter. Electronics 2023, 12, 1005. https://doi.org/10.3390/electronics12041005
Peng F, Xie W, Yan J. State Feedback and Deadbeat Predictive Repetitive Control of Three-Phase Z-Source Inverter. Electronics. 2023; 12(4):1005. https://doi.org/10.3390/electronics12041005
Chicago/Turabian StylePeng, Fan, Weicai Xie, and Jiande Yan. 2023. "State Feedback and Deadbeat Predictive Repetitive Control of Three-Phase Z-Source Inverter" Electronics 12, no. 4: 1005. https://doi.org/10.3390/electronics12041005