
Moving Target Detection Algorithm for Millimeter Wave Radar Based on Keystone-2DFFT

Abstract
:1. Introduction
2. Introduction of Simulation and Real Data
2.1. Simulation Data Experiment’s Setup
2.2. Real Data Experiment Setup
3. Moving Target Signal Model
3.1. Traffic Scene Geometry and Moving Target Signal Model
3.2. Analysis on Moving Target Range Migration
4. Moving Target Detection Algorithm
4.1. The Traditional 2DFFT Algorithm
4.2. The Proposed Algorithm
5. Experiment
5.1. Point Target Simulation
5.1.1. Time-Bandwidth Product Analysis
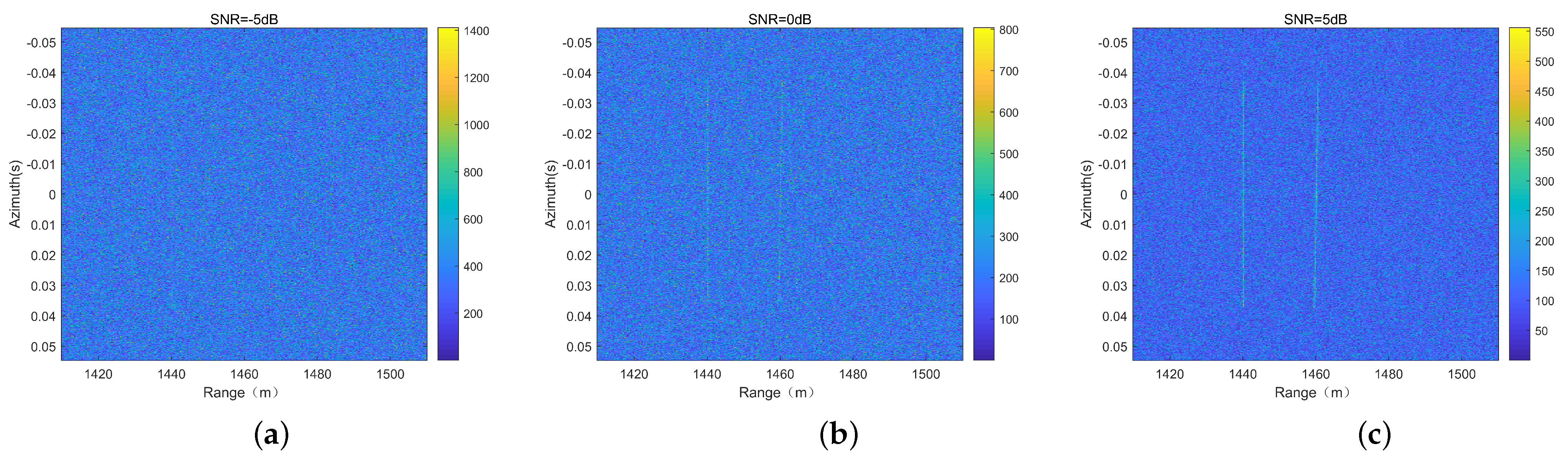
5.1.2. Signal-to-Noise Ratio Analysis
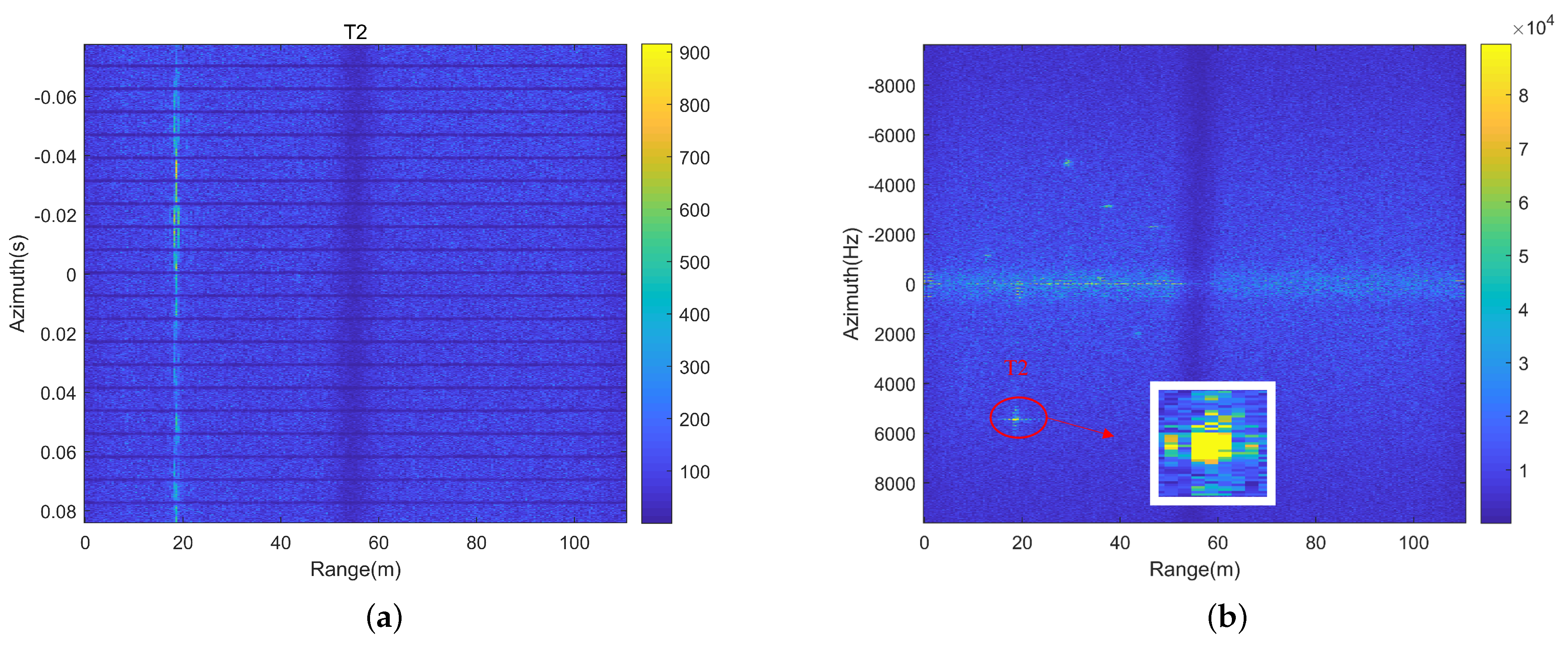
5.2. Real Data
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Prabhakara, A.; Jin, T.; Das, A.; Bhatt, G.; Kumari, L.; Soltanaghaei, E.; Bilmes, J.; Kumar, S.; Rowe, A. High Resolution Point Clouds from mmWave Radar. arXiv 2022, arXiv:2206.09273. [Google Scholar]
- Yang, D.; Jiang, K.; Zhao, D.; Yu, C.; Cao, Z.; Xie, S.; Xiao, Z.; Jiao, X.; Wang, S.; Zhang, K. Intelligent and connected vehicles: Current status and future perspectives. Sci. China Technol. Sci. 2018, 61, 1446–1471. [Google Scholar] [CrossRef]
- Bilik, I.; Longman, O.; Villeval, S.; Tabrikian, J. The Rise of Radar for Autonomous Vehicles: Signal Processing Solutions and Future Research Directions. IEEE Signal Process. Mag. 2019, 36, 20–31. [Google Scholar] [CrossRef]
- Zhou, T.; Yang, M.; Jiang, K.; Wong, H.; Yang, D. MMW Radar-Based Technologies in Autonomous Driving: A Review. Sensors 2020, 20, 7283. [Google Scholar] [CrossRef] [PubMed]
- Gao, X.; Roy, S.; Xing, G. MIMO-SAR: A Hierarchical High-Resolution Imaging Algorithm for mmWave FMCW Radar in Autonomous Driving. IEEE Trans. Veh. Technol. 2021, 70, 7322–7334. [Google Scholar] [CrossRef]
- Li, X.; Wang, X.; Yang, Q.; Fu, S. Signal Processing for TDM MIMO FMCW Millimeter-Wave Radar Sensors. IEEE Access 2021, 9, 167959–167971. [Google Scholar] [CrossRef]
- Yang, B.; Zhang, H.; Chen, Y.; Zhou, Y.; Peng, Y. Urban Traffic Imaging Using Millimeter-Wave Radar. Remote Sens. 2022, 14, 5416. [Google Scholar] [CrossRef]
- Shen, W.; Wang, S.; Lin, Y.; Li, Y.; Ding, F.; Wang, Y. Ground-Based SAR Moving Target Refocusing Based on Relative Speed for Monitoring Mine Slopes. Remote Sens. 2022, 14, 4243. [Google Scholar] [CrossRef]
- Tian, J.; Cui, W.; Wu, S. A Novel Method for Parameter Estimation of Space Moving Targets. IEEE Geosci. Remote Sens. Lett. 2014, 11, 389–393. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, D. A Novel Approach for Ground Moving Targets SAR Imaging Based on Second Order Keystone Transform. In Proceedings of the 2013 Sixth International Symposium on Computational Intelligence and Design, Hangzhou, China, 28–29 October 2013; pp. 125–128. [Google Scholar]
- Wang, Z.; Guo, Q.; Tian, X.; Chang, T.; Cui, H.L. Near-Field 3-D Millimeter-Wave Imaging Using MIMO RMA with Range Compensation. IEEE Trans. Microw. Theory Tech. 2019, 67, 1157–1166. [Google Scholar] [CrossRef]
- Changli, L. Doppler ambiguity number estimation based on range walk. In Proceedings of the 2022 3rd International Conference on Electronics, Communications and Information Technology (CECIT), Sanya, China, 23–25 December 2022; pp. 412–416. [Google Scholar]
- Yao, D.; Zhang, X.; Sun, Z. Long-Time Coherent Integration for Maneuvering Target Based on Second-Order Keystone Transform and Lv’s Distribution. Electronics 2022, 11, 1961. [Google Scholar] [CrossRef]
- Huang, Y.; Liao, G.; Xu, J.; Li, J.; Yang, D. GMTI and Parameter Estimation for MIMO SAR System via Fast Interferometry RPCA Method. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1774–1787. [Google Scholar] [CrossRef]
- Wan, J.; Tan, X.; Chen, Z.; Li, D.; Liu, Q.; Zhou, Y.; Zhang, L. Refocusing of Ground Moving Targets with Doppler Ambiguity Using Keystone Transform and Modified Second-Order Keystone Transform for Synthetic Aperture Radar. Remote Sens. 2021, 13, 177. [Google Scholar] [CrossRef]
- Chen, Z.; Zhou, Y.; Zhang, L.; Lin, C.; Huang, Y.; Tang, S. Ground Moving Target Imaging and Analysis for Near-Space Hypersonic Vehicle-Borne Synthetic Aperture Radar System with Squint Angle. Remote Sens. 2018, 10, 1966. [Google Scholar] [CrossRef]
- Tang, W.; Qian, J.; Wang, L.; Wang, Y. Refocusing of SAR Ground Moving Target Based on Generative Adversarial Networks. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 755–758. [Google Scholar]
- Wan, J.; Zhou, Y.; Zhang, L.; Chen, Z. Ground Moving Target Focusing and Motion Parameter Estimation Method via Modified Second-order Keystone Transform for Synthetic Aperture Radar. IET Signal Process. 2019, 13, 528–537. [Google Scholar] [CrossRef]
- Cenkeramaddi, L.R.; Rai, P.K.; Dayal, A.; Bhatia, J.; Pandya, A.; Soumya, J.; Kumar, A.; Jha, A. A Novel Angle Estimation for mmWave FMCW Radars Using Machine Learning. IEEE Sens. J. 2021, 21, 9833–9843. [Google Scholar] [CrossRef]
- Wang, L.; Wang, J. Radon-Fourier Transform in FMCW Radar. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Liang, Y.; Wang, H.; Xing, M.; Bao, Z. Imaging Study of High Squint SAR Based on FMCW. In Proceedings of the 2007 1st Asian and Pacific Conference on Synthetic Aperture Radar, Huangshan, China, 5–9 November 2007; pp. 6–9. [Google Scholar]
- Perry, R.P.; DiPietro, R.C.; Fante, R.L. SAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 188–200. [Google Scholar] [CrossRef]
- Moreira, J.R.; Keydel, W. A new MTI-SAR approach using the reflectivity displacement method. IEEE Trans. Geosci. Remote Sens. 1995, 33, 1238–1244. [Google Scholar] [CrossRef]
- Barbarossa, S.; Farina, A. A novel procedure for detecting and focusing moving objects with SAR based on the Wigner-Ville distribution. In Proceedings of the IEEE International Conference, Radar, VA, USA, 7–10 May 1990; pp. 44–50. [Google Scholar]
- Li, G.; Xia, X.G.; Peng, Y.N. Doppler Keystone Transform: An Approach Suitable for Parallel Implementation of SAR Moving Target Imaging. IEEE Geosci. Remote Sens. Lett. 2008, 5, 573–577. [Google Scholar] [CrossRef]
- Shun-sheng, Z.; Tao, Z.; Teng, L.; Hai-peng, Y. Dim target detection based on keystone transform. In Proceedings of the IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; pp. 889–894. [Google Scholar]
- Yang, J.; Zhang, Y. An Airborne SAR Moving Target Imaging and Motion Parameters Estimation Algorithm with Azimuth-Dechirping and the Second-Order Keystone Transform Applied. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3967–3976. [Google Scholar] [CrossRef]
- Li, G.; Xia, X.G.; Peng, Y.N. Doppler Keystone Transform for SAR Imaging of Moving Targets. In Proceedings of the 2008 Congress on Image and Signal Processing, Sanya, China, 27–30 May 2008; pp. 716–719. [Google Scholar]
- Zhou, F.; Wu, R.; Xing, M. Approach for single channel SAR ground moving target imaging and motion parameter estimation. IET Radar Sonar Navig. 2007, 1, 59–66. [Google Scholar] [CrossRef]
- Hongyin, S.; Yue, L.; Jianwen, G.; Mingxin, L. ISAR autofocus imaging algorithm for maneuvering targets based on deep learning and keystone transform. J. Syst. Eng. Electron. 2020, 31, 1178–1185. [Google Scholar] [CrossRef]
- Li, C.J.; Ling, H. Wide-Angle, Ultra-Wideband ISAR Imaging of Vehicles and Drones. Sensors 2018, 18, 3311. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Loffeld, O.; Nies, H.; Knedlik, S.; Hagelen, M.; Essen, H. Focus FMCW SAR Data Using the Wavenumber Domain Algorithm. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2109–2118. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, Y.K.; Wang, R.; Loffeld, O. Bistatic FMCW SAR Signal Model and Imaging Approach. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2017–2028. [Google Scholar] [CrossRef]
- Hyun, E.; Jin, Y.-S.; Lee, J.-H. A Pedestrian Detection Scheme Using a Coherent Phase Difference Method Based on 2D Range-Doppler FMCW Radar. Sensors 2016, 16, 124. [Google Scholar] [CrossRef]
- Song, M.; Lim, J.; Shin, D.J. The velocity and range detection using the 2D-FFT scheme for automotive radars. In Proceedings of the 2014 4th IEEE International Conference on Network Infrastructure and Digital Content, Beijing, China, 19–21 September 2014; pp. 507–510. [Google Scholar]
- Tao, D.; Anfinsen, S.N.; Brekke, C. Robust CFAR Detector Based on Truncated Statistics in Multiple-Target Situations. IEEE Trans. Geosci. Remote Sens. 2016, 54, 117–134. [Google Scholar] [CrossRef]
- Chen, X.; Liu, D.; Wang, X.; Chen, Y.; Cheng, S. mproved DBSCAN Radar Signal Sorting Algorithm Based on Rough Set. In Proceedings of the 2021 2nd International Conference on Big Data and Informatization Education (ICBDIE), Hangzhou, China, 2–4 April 2021; pp. 398–401. [Google Scholar]
- Zhu, D.; Li, Y.; Zhu, Z. A Keystone Transform without Interpolation for SAR Ground Moving-Target Imaging. IEEE Geosci. Remote Sens. Lett. 2007, 4, 18–22. [Google Scholar] [CrossRef]
- Li, X.; Cui, G.; Kong, L.; Yi, W.; Yang, X.; Wu, J. High speed maneuvering target detection based on joint keystone transform and CP function. In Proceedings of the 2014 IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 0436–0440. [Google Scholar]
- Jin, G.; Dong, Z.; He, F.; Yu, A. SAR Ground Moving Target Imaging Based on a New Range Model Using a Modified Keystone Transform. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3283–3295. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Center frequency | 77 GHz |
| PRF | 18,750 Hz |
| Signal bandwidth | 346 MHz |
| Pulse number | 2048 |
| Range sampling points | 256 |
| Target | (m/s) | (m/s) |
|---|---|---|
| S1 | 0 | 0 |
| T1 | 15 | 0 |
| Parameter | Value |
|---|---|
| Center frequency | 77 GHz |
| PRF | 19,230.77 Hz |
| CPI | 0.162 s |
| Signal bandwidth | 346 MHz |
| Frequency modulation rate | 15.015 MHz/us |
| Pulse number | 2688 |
| Range sampling points | 256 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, W.; Wang, S.; Wang, Y.; Li, Y.; Lin, Y.; Zhou, Y.; Xu, X. Moving Target Detection Algorithm for Millimeter Wave Radar Based on Keystone-2DFFT. Electronics 2023, 12, 4776. https://doi.org/10.3390/electronics12234776
Shen W, Wang S, Wang Y, Li Y, Lin Y, Zhou Y, Xu X. Moving Target Detection Algorithm for Millimeter Wave Radar Based on Keystone-2DFFT. Electronics. 2023; 12(23):4776. https://doi.org/10.3390/electronics12234776
Chicago/Turabian StyleShen, Wenjie, Sijie Wang, Yanping Wang, Yang Li, Yun Lin, Ye Zhou, and Xueyong Xu. 2023. "Moving Target Detection Algorithm for Millimeter Wave Radar Based on Keystone-2DFFT" Electronics 12, no. 23: 4776. https://doi.org/10.3390/electronics12234776