1. Introduction
Vehicular positioning systems are actively used in various fields such as autonomous vehicle driving, production, the distribution industry, and the military [
1]. Generally, the Global Positioning System (GPS) [
2], which utilizes satellites, is used for the positioning of ground vehicles or aerial vehicles. However, GPS has the disadvantage that the reception signal is weak in complex urban terrain and cannot be used in indoor environments. This is because GPS estimates the location through direct communication between a mobile node and a subset of satellites, and in environments with many obstacles or indoors, where radio reception is not possible, it may not be possible to accurately measure the distance between them due to the straightness of radio waves [
3].
Furthermore, the accuracy of GPS is generally less accurate than that of indoor positioning systems. In automotive services that require a high precision for the indoor positioning system, metrics other than GPS are often adopted to meet the strict requirements for accuracy and reliability [
4]. In these environments, various vehicular positioning systems that build their own infrastructure to estimate the location or the target are actively used [
5]. In particular, the Vehicular Ad hoc Network (VANET) positioning system [
6] addressed in this paper is mainly used when performing missions with a specific purpose in a robot or vehicle network or performing support tasks for other vehicles in the swarm. Application examples include positioning for autonomous parking in an underground parking lot, drone shows using a swarm of micro drones, real-time traffic information sharing, various missions using unmanned vehicles in spaces where human have difficulty entering, and smart factories and roads [
7].
Vehicular positioning systems can utilize various sensors and wireless signals, such as Inertial-Measurement-Unit (IMU)-based Dead Reckoning (DR) [
8], Bluetooth [
9], ultrasonic waves [
10], WiFi [
11], and Ultra-Wideband (UWB) [
12]. Among them, UWB is the metric that has recently received the most attention in VANET positioning and is actively used and researched in various fields. Compared to other systems, the UWB positioning system has strengths in various aspects, such as high location estimation accuracy, reasonable configuration price, and high system robustness [
13].
Distance-based UWB positioning systems generally use the Time Difference of Arrival (TDOA) [
14,
15,
16] and Two-Way Ranging (TWR) [
17,
18] in the ranging process, and both methods utilize device timeline data. Distance-based positioning has advantages such as no major constraints on the infrastructure configuration, high accuracy, and no severe interference from multiple paths, but it has a fatal disadvantage in that the location estimation error is greatly affected by distance. Generally, in order to perform n-dimensional positioning, n+1 pieces of distance information are used, and if even one distance has an unexpected value, the overall positioning performance will be seriously degraded.
The core strength of the UWB system is high-accuracy positioning based on distance measurement with high time resolution by using pulse waves. In other words, the precise measurement of timestamp, which is the device timeline data, is possible. In missions where positioning accuracy is key, if the transmitting device ID or receiving timestamp data for the UWB signal are unclear or have an error in their values, the probability of the task failing can greatly increase. Even if an attacker with a malicious intent manipulates the data of only one device among the nodes that make up the system, serious degradation of the positioning performance may occur, leading to task failure. As a result, distance-based ad hoc device indoor positioning systems such as UWB systems have the disadvantage of being quite vulnerable to external attacks.
When positioning data (in our case, the transmitting device ID for the received signal and the device timestamp data at the time of signal reception) are forged or altered due to a malicious attack on mission performance, the overall performance of the positioning system is greatly reduced, and the mission success rate is also significantly reduced. So, we propose a localization framework applying a Directed-Acyclic-Graph (DAG)-based distributed ledger to build a positioning system that not only securely processes and manages the sensor data generated from the positioning nodes, but also guarantees deterministic performance without degradation, depending on the network scale.
Most distributed ledger systems applied to IoT networks, such as positioning systems, are based on blockchain and, in many cases, adopt the Proof-of-Work (PoW) as the consensus algorithm [
19]. This method basically performs a hashing operation with a nonce value as the input to create a block, so it requires high computing power and causes significant delay due to the complex verification method. Moreover, the data handled in the positioning system comprise a micro-transaction with a simple structure. However, the unique nature of blockchain, which requires block generation, makes it difficult to create micro-transactions in the positioning system [
20]. Our proposal adopts a DAG-based distributed ledger technology. Compared to blockchain, it has a relatively simple verification method and does not require a separate hashing operation to process the transactions, resulting in high processing speed. Additionally, it is more suitable for handling micro-transactions because it processes and manages each transaction as an individual task. Moreover, due to the nature of DAG technology, the processing speed increases as the number of participating nodes increases. This fact can give our proposal many advantages in solving scalability problems in large-scale network environments such as smart cities, smart grids, and vehicular networks [
21].
Since positioning systems are mainly used for tracking or monitoring purposes, high real-time performance is required. These systems are inevitably sensitive to latency. Even with DAG-based technology, the delay time and workload that occur in the process of creating, verifying, and confirming transactions and synchronizing transaction information cannot be ignored [
22]. For these reasons, we propose a new consensus algorithm suitable for the positioning environment to reduce the delay time that occurs in the ledger layer during the positioning process and improve the transaction processing speed. It is a global state consensus based on a threshold and proposes a method to quickly confirm micro-transactions for positioning.
Based on the descriptions so far about using distributed ledger technology in a localization environment, the contributions of this article are summarized as follows:
Distance-based positioning methods that use multiple distance values and the fixed coordinates of anchors have default errors and serious distortion problems in noisy environments. To solve this, we propose an enhanced localization technique using a nonlinear least-squares optimization technique and verified its performance.
We propose a new consensus algorithm applicable to DAG-based distributed ledgers and suitable for positioning systems. Due to the nature of existing DAG-based distributed ledgers, individual nodes manage their own local state, which can cause excessive computing load and delay the time to reach consensus. We applied a new consensus algorithm to improve the efficiency during the consensus-reaching process and describe in detail how to apply it in the target environment.
We designed a complete localization framework with a DAG-based distributed ledger equipped with the proposed localization technology and consensus algorithm. Through this, we systematized and concretized our suggestions. In addition, we provide an environment for the libraries and tools to utilize related technologies along with fully implemented functions. This sets the stage for development expansion and reduces future development costs.
The remaining part of this paper is organized as follows. We introduce the related work in
Section 2. In
Section 3, we give a detailed explanation of our positioning system and consensus algorithm.
Section 4 evaluates the performance of the proposed localization framework. Finally,
Section 5 concludes this paper.
3. System Design
3.1. Overview
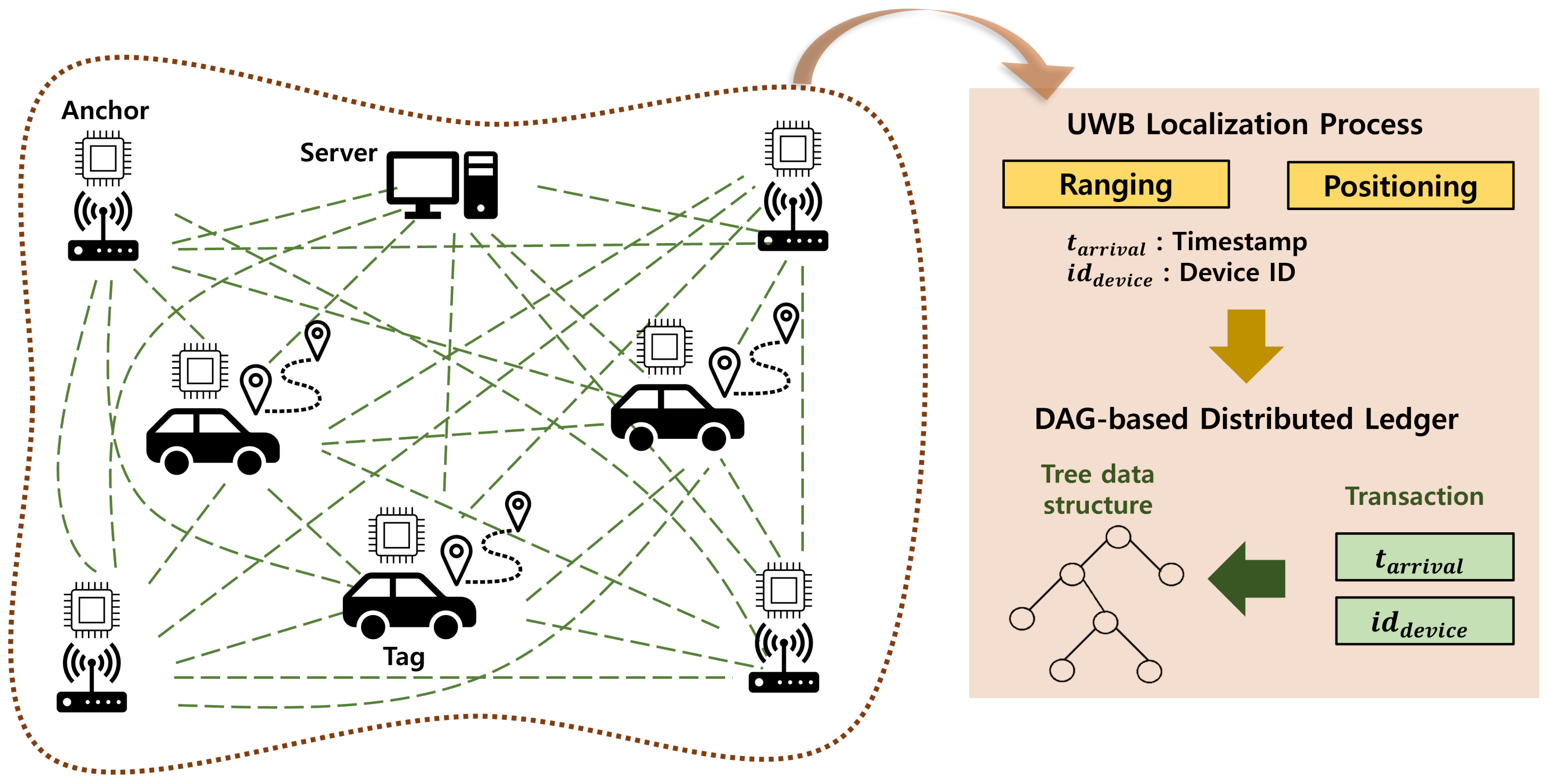
Figure 1 shows the schematic of our proposal applied in a real environment. It has a general design that performs positioning using UWB in a local network environment consisting of a server, anchors, and tags, and this reflects the intention to minimize the cost of infrastructure modification due to the application of a new technology. To list the differences, firstly, our proposal utilizes an improved localization technique. When measuring location based on distance, multiple distance values and fixed coordinates of the anchor are used as the inputs. These inputs have default errors and can cause significant distortion in noisy environments. These changes in input values can be a factor that significantly reduces the quality of positioning. We solved this problem by improving the conventional positioning method. Second, our proposal designs a new positioning system using a DAG-based distributed ledger. In vehicle networks comprised of manned/unmanned aerial vehicles, excellent positioning techniques are essential for accurate position measurement, and it is very important to protect the system from malicious attacks such as forgery and falsification, which can significantly reduce the accuracy of position measurement. Typically, high levels of security incur significant overhead in networking and computation. On the other hand, positioning systems require high real-time performance. In short, positioning performance and system safety are a trade-off. In summary, the security technology applied to the positioning system must satisfy both low system overhead and excellent safety. For this reason, this paper applied a DAG-based distributed ledger with improved consensus to the positioning system.
Based on the two new proposals mentioned above, we ultimately propose a complete localization framework. Our proposed localization framework provides a positioning system based on trust. All the positioning nodes operate as participants on the DAG-based distributed ledger. This means that transactions containing data necessary for positioning are created, verified, and confirmed according to a consensus, and transaction information is distributed throughout the network.
Figure 2 shows the system architecture of the proposed localization framework. The description of the components can be listed as follows:
The device layer is a device abstraction layer that generalizes resources for the purpose of managing and controlling the resources available in the framework. This method reduces the development costs for heterogeneous devices and provides an intuitive interface to the users.
The P2P network layer manages P2P connections between nodes and defines security-related tasks.
The service layer verifies the transaction information collected through the network and records it in the ledger. The recorded transaction includes not only the UWB sensor data, but also the details of the devices participating in the network, such as the device ID and status information, and based on this, the main services such as generating the location information of the target devices and generating device metadata are operated.
The application layer includes the implementation of various functions through the API, such as the framework’s positioning service, device control, and distributed ledger query. Based on this, it provides various positioning services to the users and useful functions necessary for positioning developers to develop their own technologies.
Figure 2.
This is a system architecture of the proposed localization framework with a distributed ledger.
Figure 2.
This is a system architecture of the proposed localization framework with a distributed ledger.
At the device layer, the data for positioning are generated in real-time by positioning devices such as UWB sensors. Not only that, the data necessary to operate various services along with the location information, such as the device status information and actuator information, are generated. The proposed framework manages all these data as transactions and transmits them to the P2P network. The service layer verifies the transactions received from the device layer and updates the verified transactions to the DAG of the distributed ledger. In this way, the transactions recorded in the DAG, more precisely the transaction information, are used to operate various service processes at the service layer. For example, the main services include a positioning service process, which calculates the location information of the target devices using positioning techniques such as Double-Sided TWR (DS-TWR), and a device manager, which dynamically monitors and controls the devices participating in the network. We designed the framework so that these services can be added or expanded as needed, and the implementation of various functions for these services can be exposed to users or developers through the API.
Over the next two subsections, we describe in detail the implementation of the improved localization technique and the distributed ledger with the new consensus mechanism in the proposed framework.
3.2. UWB Localization
3.2.1. Ranging Module for Framework
In our framework, the TWR method was used among the UWB distance measurement techniques. TWR is a ranging method that measures the Time of Flight (ToF), which is the transmission and reception time between devices, through two-way message exchange. TWR is divided into Single-Sided TWR (SS-TWR) and DS-TWR depending on the number of message exchanges. SS-TWR is a method of sending and receiving a total of two messages once from each device, and the ToF is calculated by dividing the difference between the round-trip time and the reply time in half. This method has the advantage of having a simple structure with a small total number of messages exchanged between devices. However, SS-TWR has a clear disadvantage in that, as the clock offset and response time to the first received message increase, the ToF estimation error can increase to a level where the distance estimation becomes significantly inaccurate. DS-TWR, an extension of basic SS-TWR, uses two round-trip time measurements and combines them to produce the ToF results with reduced error even in the case of quite long response delays. The proposed system uses DS-TWR, which uses a total of 3 messages to estimate the ToF for ranging between nodes, and this method does not need to perform clock synchronization between the nodes [
56].
In the proposed framework, the estimated ToF in the timestamp can be calculated using the following equation:
where all the parameters are shown in
Figure 3, which shows the process of communication between the nodes.
Then, the measured timestamp can be straightforwardly converted into the distance using the following equation:
In this equation, d represents the estimated distance between the ranging nodes, is the estimated ToF from the timestamp including the antenna delay correction factor, and is a proportional factor. is a constant value utilized in the calculation of the estimated distance from the ToF.
The DW1000, which is the UWB sensor used in our system implementation, is equipped with a sampling clock operating at 63.8976 GHz [
57]. In other words,
clock cycles occur per second, which means that the clock cycle is
s. Therefore, the clock period is approximately 15.65 ps. This high sampling frequency allows timestamps to be measured at very short time intervals, enabling highly precise distance measurement and location tracking. Considering the propagation speed of UWB signals of 300,000 km/s, the UWB signal propagates 0.0047 m per clock cycle, which means that it travels 0.0047 m per timestamp of the ToF calculated with DS-TWR. Therefore, we established the proportional factor
at 0.0047, and through subsequent experiments, we empirically derived the optimal
value of 0.2321.
3.2.2. Nonlinear Least Squares for 3D Position Estimation
The proposed framework utilizes trilateration, a distance-based technique, for the positioning operations. Trilateration is a technique to determine an unknown point using distance information from three or more known points. In general, n + 1 anchor information is required to perform n-dimensional positioning. By solving the resulting system of nonlinear equations, the target’s position can be effectively estimated.
One of the core strengths of trilateration lies in its simplicity and efficiency. When the distances from the anchors are precisely known, and the anchors are non-collinear, trilateration yields highly accurate positional estimates. Additionally, it is scalable and adaptable, making it a preferred choice for applications ranging from indoor positioning systems to Global Navigation Satellite Systems (GNSSs). In the context of 3D positioning, the process becomes somewhat intricate due to the introduction of a third dimension.
We employed a nonlinear least-squares approach to enhance the accuracy and robustness of positional estimates, even in the presence of measurement noise and errors. In the proposed framework, the conventional trilateration technique is augmented through an algorithm that harnesses the power of nonlinear least-squares optimization, particularly the Levenberg–Marquardt algorithm [
58], for enhanced accuracy and reliability in 3D position estimation. This enhancement is pivotal in scenarios where conventional trilateration might be susceptible to errors induced by various factors, including distance measurement inaccuracies and environmental noise.
Algorithm 1 shows the detailed process of the trilateration technique we applied. The algorithm is initiated by defining a cost function
, which is the summation of the squared differences between the actual measured distances and the computed Euclidean distances from the estimated tag position to the anchors:
This cost function serves as the objective to be minimized, facilitating an accurate estimation of the tag’s 3D coordinates
.
| Algorithm 1 The 3D trilateration using nonlinear least squares. |
![Electronics 12 04756 i001]() |
The optimization process employs the Jacobian matrix , consisting of the partial derivatives of the cost function with respect to the coordinates of the estimated tag position. The Levenberg–Marquardt algorithm optimizes the tag’s position by iteratively refining an initial estimate . This iterative refinement ensures convergence towards a solution that minimizes the residual error, adhering to pre-established tolerance levels and maximum iteration constraints.
Then, the residual
to evaluate the quality of the position estimate uses the Root Mean Square (RMS) value of the prediction error and is calculated as follows.
A lower residual value indicates a higher accuracy of the estimated position, ensuring alignment with the measured distances from the anchors.
This enhanced trilateration algorithm is particularly advantageous in environments where precision and reliability are paramount. The integration of the Levenberg–Marquardt optimization algorithm compensates for potential errors and noise in the distance measurements, delivering more-accurate and -consistent results. Applications of this refined trilateration technique span across various domains including indoor positioning, robot navigation, and satellite-based positioning systems. Its adaptability and scalability cater to the diverse and dynamic requirements of these applications, offering a robust solution for real-time, accurate 3D position estimation in complex environments.
3.2.3. Dataset for DAG-Based Distributed Ledger
As previously mentioned, in tasks that require precise positioning accuracy, the positioning system can collapse even if only a part of the data of the nodes that make up the cluster is slightly tampered with by a malicious attack. Furthermore, in the case of 3D trilateration, the accuracy of the distance estimate is directly related to the positioning performance, and the task may fail even if the error in only one of the four distances increases. Therefore, to ensure the security and reliability of the positioning system, a specific policy must be established to prevent distance precision degradation from attackers.
In this regard, the proposed framework establishes a security policy to ensure the integrity of the data. We created a transaction with a dataset consisting of the reception timestamp and transmitting device ID for the received UWB signal, which comprises the raw data of the ranging module that outputs the distance, and recorded it in the distributed ledger according to the verification and consensus procedure.
3.3. Distributed Ledger for Positioning
The localization framework we propose can provide strong reliability as distributed ledger technology is applied. Since all decisions made in the distributed ledger are made through consensus among network participants, actions that violate consensus are not possible. In addition, if a malicious node arbitrarily modifies the data or attempts to hack the system, this is almost impossible because the hashes of all blocks connected to a chain in the ledger must be modified. This allows us to keep the system safe from external threats. In addition, in a positioning system that operates in a conventional centralized manner, the main authority is usually concentrated on the main server, so if this main server goes down, there is a risk that the entire system will be paralyzed. However, our proposed decentralized localization framework solves the side effects of conventional centralized methods by decentralizing between nodes that smartly distribute trust. Moreover, this system of components with equal rights provides strong sustainability. If a single node is incapacitated by an external attack or a system error, the centralized system risks performance degradation or, in serious cases, the paralysis of the entire system. However, our proposed system has an environment that can solve problems arising from the temporary absence of a single node through dynamic allocation. For example, when an arbitrary anchor becomes incapacitated, a tag with the lowest priority from a mission perspective takes over the role of that anchor to prevent performance degradation. On the other hand, these features may also have an advantage in terms of adaptively applying to heterogeneous environments. In an environment where various topologies are formed and roles are dynamically assigned depending on the mission or environment, it is possible to respond to system development or modification without large costs.
It makes sure that the applied distributed ledger does not have a negative impact on previous positioning performance, so we designed a new consensus algorithm to reduce the task load in terms of latency. In the nature of the DAG structure, where each node maintains a global state rather than maintaining a global state across the network, the number of pending transactions may increase. To improve this, we devised a new method that defines verification nodes and reaches consensus based on scores awarded through mutual approval between these nodes (in the existing method, the created transaction verifies the pending transaction). First, we assumed some facts as follows:
All nodes participating in the network are connected to each other.
The tag is connected to at least one of the anchors or servers.
Anchors and servers are functionally separate expressions according to their positioning roles, but are the same logical node in a distributed network.
The proposed consensus algorithm operates by two components called the
miner and
prover. A
miner verifies transactions created in real-time and updates the verified transactions in the DAG. Afterwards, the updated information is broadcast to all
miners existing in the network.
Provers approve and confirm transactions created by
miners according to defined global state consensus. Global state consensus refers to the process of increasing the cumulative score, which is a newly defined parameter at a vertex of the DAG that represents a single transaction, as a
prover approves a single transaction. If the score exceeds the specified threshold, the global state of the transaction is updated to confirmation. The cumulative score can be expressed as:
where
n is the number of approved
provers and
is the total number of provers.
provers are all or some of the
miners selected, approve pending transactions in the DAG, and broadcast the fact that the transaction has been approved to all
miners participating in the network. When a node that is both a
miner and a
prover receives this fact, it indexes its DAG with approved transaction information (e.g., transaction ID), accesses a vertex storing the transaction, and updates the cumulative score. This process is repeated, and when the cumulative score of the transaction exceeds the threshold, the transaction is confirmed.
4. Evaluation
After the construction of the proposed framework, we conducted a series of experiments to verify its operations and evaluate its performance. First, we verified the performance of the positioning system that makes up the framework and, then, verified how data tampering by malicious attacks affects the positioning performance. Then, in the distributed ledger technology applying a new consensus algorithm, we verified the impact of the confirmation threshold on transaction processing performance and how system performance varied according to changes in the network scale. Lastly, we evaluated the security performance of the proposed framework by modeling a race attack scenario, one of the common blockchain attack methods.
4.1. Verification of the Proposed Localization System Accuracy
We implemented a positioning device using a Raspberry Pi 4 and DWM1000 UWB module in a real experimental environment. Detailed specifications for the positioning module implementation and experiment are shown in
Table 1. Each hardware component has the following characteristics.
The Raspberry Pi 4 is a powerful computing device with a 1.5 GHz quad-core CPU and up to 4 GB RAM, making it ideal for rapid data processing and extensive sensor processing via GPIO pins. However, the Linux-based operating systems we utilized have common security vulnerabilities and require regular updates and strong security measures.
The DWM1000 module, which uses the DW1000 UWB chipset, has a distance measurement accuracy of several tens of centimeters and shows precise location tracking performance, making it suitable for use in experiments sensitive to spatial data. While the module itself is not vulnerable to traditional malware, integration with other systems requires secure data transmission protocols to prevent wireless signal interference or tampering, highlighting the need for encryption and security practices.
To evaluate the performance of the proposed localization system, we first verified the positioning performance in an environment without malicious attacks. Using the implemented positioning device, we set the anchors and tags and performed the 3D localization of three tag nodes. The ranging and positioning modules mentioned earlier were employed for indoor localization.
Figure 4 and
Table 2 show the results of the localization performance experiment. The enhanced positioning module demonstrated the excellent performance of the UWB system in real-world environments where noise can occur. Each of the three tag nodes showed localization errors of 10.50 cm, 10.82 cm, and 13.10 cm and standard deviations of 5.10 cm, 4.41 cm, and 6.07 cm, respectively. Thus, the proposed localization system exhibited outstanding performance when there were no external attacks.
4.2. Effect of Malicious Attacks on Positioning Accuracy
In
Section 4.1, we verified the performance of the positioning system within the service layer of the proposed framework using the enhanced positioning module. In this section, we demonstrate the impact of malicious attacks on the performance of a positioning system through experiments in a real environment. In this section, we show how the performance of an entire positioning system can be seriously damaged when a malicious attack is inflicted on one of its constituent nodes. In other words, it shows that measures to strengthen security in the positioning system are necessary.
The experimental configuration can then be summarized in terms of localization as follows. In
Section 4.3, we evaluated the data processing performance of the consensus algorithm of the proposed framework. There is a risk of delay in the positioning system due to additional system load caused by the blockchain, which was applied to defend against malicious attacks. We showed that this risk is not a problem in practice through the verification of the new consensus algorithm in terms of the time to reach consensus.
Section 4.4 evaluated the consensus algorithm using the race attack scenario, which is a common malicious attack scenario considered in DAG-based distributed ledger systems. Our simulations demonstrated that our proposed solution can disable malicious transactions faster than IOTA [
59], the most-widely adopted DAG-based distributed ledger system. Afterwards, we verified that the proposed framework is a security-stable system by showing that it maintained excellent data processing performance even when the intensity of the attack increased.
We conducted two experiments to examine the impact of tampering with the data of one node in the cluster, formed in the experimental environment of
Section 4.1, on the positioning performance.
4.2.1. Timestamp Data Tampering
Initially, we tampered with the reception timestamp, which is recorded on the device when an anchor node receives a UWB message. As mentioned in
Section 3.2.1, the implemented module records the timestamp data that the DW1000 chipset generates and records internally. Therefore, the minimum interval of recordable timestamps was 15.65 ps, and we refer to this value as a time slot. We generated tampered timestamp data by adding Gaussian noise of various scales to one anchor node. We conducted experiments for a total of eight cases, including the steady state, and collected data for three minutes for each case.
Table 3 and
Figure 5 present the experimental results.
Table 3 first shows the average error, representing the mean error of the localization data collected from the three tag nodes. The steady state case performed normal localization without data tampering. The seven noise-generating cases added Gaussian noise with the respective mean and 10% of the numerical standard deviation to each of the message reception timestamp data. The experimental results showed that even a slight time data manipulation of an average of 500 time slots can increase the error to nearly 6 m, an unacceptable error range for most tasks requiring precise localization. Additionally, as a result of performing timestamp modulation over 1000 time slots, it can be seen that the position estimation error was too large to say that positioning was being performed.
To the average error values shown in
Table 3, we graphed the cumulative distribution function for the positioning error data collected from a total of eight cases, including the steady state.
Figure 5 shows the CDF of the positioning error data for each case from the same experiment, with the x-axis representing the positioning error in a log scale. As seen in the table and figure, when a time data attack occurred, the positioning performance deteriorated severely, not only in cases of significant numerical manipulation, but also in cases of minor alterations. As can be seen in the graph, the steady state showed stable results with very low positioning errors for most data. For the remaining seven cases that included noise, most of the data collected over 3 min showed highly large positioning errors at a similar level.
4.2.2. Device ID Data Tampering
Each node that makes up the positioning system receives UWB signals from other nodes. At this time, the UWB message includes the ID of the transmitting device and transmission timestamp information. Nodes in the positioning system are given device IDs starting from Number 1 according to the registration order after system operation. Therefore, all nodes in the system have different device IDs, and each device pair performs DS-TWR-based ranging using the node ID and transmission and reception timestamp data.
In this subsection, we randomly tampered with the transmitting device’s ID. When one specific node out of the total of seven constituting nodes received a UWB message, we randomly reset the transmitting node’s ID to one of the remaining six nodes (excluding itself), performed ranging with that distance information, and executed positioning. We implemented this environment in reality and checked the performance.
As a result, the positioning errors of the three tags were 8.85 e + 12 m, 185.95 m, and 7.86 e + 12 m, respectively. The results of the experiment showed how seriously positioning performance can be damaged if the identity of the transmitting device is unknown or the data are damaged due to a malicious attack.
The basis on which this result was derived is as follows. The device ID data tampering experiment evaluated the positioning performance by randomly altering the transmitting device ID for a specific target among the system nodes each time a signal was received. Therefore, the positioning error value for each tag may significantly vary with each repetition of the experiment. The key point, however, is that the potential positioning error can be quite large. All time data for calculating the ToF based on DS-TWR were obtained within the timeline of each device. Therefore, using this method to determine the ToF did not require a synchronization process for aligning timelines between devices. However, if only the device ID were manipulated, the receiving node may interpret the signal as coming from the same device, while the actual timestamp is from a device with a completely different timeline. This would lead to a distortion of all time data used for the ToF calculation, thereby disrupting the overall ranging performance.
4.3. Transaction Measurement
This subsection evaluates in detail the performance of the distributed ledger applied to the proposed localization framework through two experiments. For these experiments, we implemented a simple Proof-of-Concept (PoC) system and evaluated our proposal through a simulation in an environment where transactions were scheduled to be generated similar to real situations. The experiment was largely divided into two parts.
First, we measured the change in transaction throughput according to the change in the confirmation threshold and analyzed the results. According to the proposed consensus algorithm, each transaction recorded in the DAG had a score accumulated each time it was approved by the
prover, and when this score was greater than the threshold, the transaction was judged to be in the confirmation state. For this reason, how the threshold is set can greatly affect the transaction processing performance of the proposed localization framework. We conducted a simulation by changing the threshold from 10 to 50 in 10 increments in an environment with 30 tags and 20 fixed nodes composed of a single server and multiple anchors, and the result appears as
Figure 6. The x-axis of the graph represents the size of the threshold, and the y-axis represents the confirmed transaction rate. According to the results, it can be seen that the smaller the threshold, the faster transaction confirmations reached saturation. Analyzing the results, as the threshold became smaller, the proposed localization framework could process transactions faster, but the security level was lowered, making it vulnerable in protecting the system from malicious transactions. Conversely, as the threshold increased, our system provided stronger security performance, but the delays occurring during transaction processing increased, which, in turn, lowered the quality of the positioning service. When the threshold was high, a single transaction must be approved by more
provers to increase the cumulative score above the threshold, and in this process, factors that cause performance degradation, such as processing delay, which occurs while the
prover approves the transaction, and network delay, which occurs in the process of broadcasting a newly created transaction or a transaction indicating that the
prover has approved the transaction, their influence increased. In other words, safety and positioning performance are a trade-off, and it is important to set the optimal value that can properly maintain both.
Second, we measured the change in system performance as we varied the network scale of the localization framework. In an environment such as a vehicular network where the topology of participating nodes changes in real-time and the network scale increases or decreases irregularly, it is a very important consideration whether the system maintains constant performance and stably provides services. We measured the average transaction processing time of the proposed localization framework, which changes, while simultaneously increasing the number of
miners and
provers at a constant rate, and the results appear as
Figure 7. According to the results, the average processing time was between 0.09 and 0.11 s, and the difference between the maximum and minimum average times was only 0.02 s. For reference, as the network scale increased, the processing speed tended to become slightly faster. This is because the speed of approving transactions increased as the number of
provers increased, so it had nothing to do with what we wanted to suggest through this experiment.
4.4. Security Performance
This subsection evaluates the security-related performance of the distributed ledger applied in the proposed framework. To evaluate the security performance, we implemented a simulation environment for race attacks, a representative attack that can occur in general distributed ledger systems. A race attack is a type of double-spending attack, a common distributed ledger attack scenario, and refers to an attack with the intention of disrupting the verification system of the distributed ledger using multiple transactions. In a simulation environment, some of the total transactions that occur over a period of time are defined as transactions with malicious intent to attack the entire system. When malicious transactions are verified by the prover and recorded in the DAG, the attack is ultimately successful. Therefore, users with malicious intent strive to add to the distributed ledger by continuously generating attack transactions.
First, we measured the average deactivation time for the malicious transactions that occurred and validated the performance of the distributed ledger framework. In order to compare the performance of the proposed framework according to the race attack probability change in the simulation, we used IOTA [
59], the most-representative DAG-based distributed ledger system. IOTA is a representative example of a cryptocurrency based on DAG-based distributed ledger technology, which, unlike blockchain, does not use blocks. IOTA uses a structure called a Tangle to build a graph by connecting each transaction with previous transactions. Additionally, this graph-creation method has an advantageous structure for supporting micro-transactions between small devices, so it has high potential for use in the vehicular network field. Therefore, in this experiment, we would like to evaluate the security performance of the proposed system by comparing the proposed system with IOTA, the most-commonly used DAG-based distributed ledger system.
Both the proposed system and IOTA have a DAG-based data storage structure, but there is a significant difference in the consensus algorithm that verifies the generated transactions. The proposed system updates transactions through two components:
miner and
prover. During the update process, the cumulative score for a single transaction is increased, and the transaction is verified when the transaction exceeds a certain threshold. The verification process based on this consensus algorithm is advantageous for processing multiple transactions created simultaneously, and we intended to verify this through experiments. In the simulation environment, general network conditions such as the transaction creation speed, network communication delay, and bandwidth settings were reflected using empirical values [
46].
Figure 8 shows the results of a simulation performed by changing the race attack probability from 10% to 50% in an environment with a total of 20 nodes using 10 tags, a single server, and 10 anchors. In a simulation environment consisting of a total of 20 nodes, each tag communicates with a fixed anchor and continuously generates transactions related to the location data. We assumed an attack by a malicious node and added some incorrect data transaction information to these periodically generated normal transactions. Attacks caused by these malicious transactions can be identified through the verification process of the distributed ledger system. Deactivation time refers to the time it takes to deactivate a transaction that occurs in a distributed ledger system by determining it to be a malicious transaction. In this experiment, we evaluated the security-related performance of each distributed ledger system by averaging the time it takes to identify and disable malicious transactions.
In the case of the verification process based on IOTA’s Tangle structure, when 10% of all transactions that occurred were attacked, it took about 3.8 s to determine and deactivate them. These results confirmed that even if the race attack probability was increased from 10% to 50%, there was a similar average deactivation time of about 3.2 s. In comparison, the average deactivation time of the proposed framework at a race attack probability of 10% was about 1.3 s, which can be seen to be much faster than the existing system. Additionally, the proposed framework found that the average deactivation time of about 1.3 s was maintained even by increasing the probability of competing attacks from 10% to 50%. IOTA distributed ledger system uses a special DAG architecture called “tags” to group and distinguish transactions. A “tag” contains a reference to the two immediately preceding transactions and is used to categorize transactions together with a specific topic or purpose. “Tags” are a special feature of IOTA, but the process of forming these “tags” increases the time it takes to verify and propagate transactions. Additionally, this accumulation of transaction propagation and verification time delays ultimately increases the average deactivation time. This means that the verification process using the miner and prover of the proposed framework can verify malicious transactions much faster than existing systems. As a result, the proposed framework is more suitable for transaction processing in vehicular networks, where real-time updates are important.
Second,
Figure 9 measures the transaction throughput of the proposed framework according to changes in the race attack probability. Through previous experiments, it was confirmed that the existing distributed ledger system IOTA has a transaction deactivation time that is approximately twice as long as the proposed system. The reason why the transaction deactivation time is longer than the proposed system is because the IOTA system has slower transaction propagation, verification, and confirmation times. Therefore, in the second experiment, the performance of the proposed system was confirmed through the detailed verification of transaction throughput according to the attack scenario of the proposed system, rather than a comparative experiment with the existing system, IOTA. The results showed that the distribution of the final transaction confirmation time was between approximately 4.5 and 6 s. As can be seen in the experiment above, since it took about 1.3 s to verify a malicious transaction, it can be seen that more time was needed to confirm one transaction. Additionally, we can see that the confirmation rate distribution had almost no difference even as the attack transaction rate increased from 10% to 50%. This means that the proposed distributed ledger framework can support a certain level of transaction processing regardless of the proportion of malicious transactions among newly created transactions. Since the proposed framework guaranteed stable transaction processing against transaction attacks by malicious attack nodes, it can be confirmed that it is a secure system.
5. Conclusions
In the process of performing various missions using a swarm of vehicles, the possibility of malicious attacks such as data forgery and falsification must be considered, especially in situations where accurate location estimation is required. In the UWB positioning system, data generated from each node are used to calculate the ToF. Data safety is very important because, if even a single piece of data is forged or altered, the accuracy of location measurement can be greatly reduced. Therefore, by introducing a DAG-based logical network between each node, data integrity and safety are guaranteed, and location measurement performance is prevented from deteriorating. In this paper, we proposed a safe and accurate location measurement framework using improved UWB positioning techniques and a DAG-based distributed ledger. We proposed a DS-TWR-based ranging module optimized through empirical calibration and a positioning module. which improved the existing trilateration by applying the Levenberg–Marquardt algorithm, a nonlinear least-squares optimization technique. Moreover, by applying a new consensus algorithm to the distributed ledger of the proposed localization framework, the transaction processing performance per unit time was improved, and the delay time was reduced, thereby satisfying the real-time requirements of location technology. Ultimately, we proposed a complete positioning framework that applies improved positioning techniques and distributed ledger technology and conducted various performance evaluations for each detailed technology. We demonstrated the performance of the localization system constituting our framework through experiments in a real environment and validated how the localization performance changes when the actual received data are tampered with by malicious attacks. In addition, the distributed ledger technology using a new consensus algorithm was verified in terms of threshold dependence and network scale dependence. As a result, the proposed system reduced the speed of confirmation saturation as the threshold increased, and consistent transaction processing performance can be achieved regardless of network scale. Finally, we verified the security performance of the proposed framework by measuring the average deactivation time and confirmation rate through a race attack scenario on the distributed ledger system. The proposed distributed ledger technology had a reduced average deactivation time compared to existing DAG systems and showed constant transaction processing performance regardless of malicious transaction creation.
We have several research plans for future work. First, we plan to improve the positioning performance through machine learning or a more-advanced optimization model. Second, we will apply a smart contract and off-chain solution for the efficiency and scalability of our proposal. This will allow us to improve the positioning accuracy and strengthen the decentralization of the proposed positioning framework.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}