
Deploying a Low-Cost Wi-Fi-Based Vehicular Ad Hoc Network in a Shopping Mall Parking Lot: An Empirical Study




Abstract
:1. Introduction
1.1. Research Challenges
- Question 1: What Wi-Fi-based VANET can be deployed in a large shopping mall parking lot to reduce car accidents?
- Question 2: What best practice guidelines can be provided to network designers and planners for implementing a low-cost VANET in parking lots?
- Question 3: What propagation model would best fit (closest match) with field measurement data?
1.2. Research Contribution
- We conduct field measurements using wireless laptops and cards to collect a rich dataset in a large shopping mall parking lot in Auckland. To this end, we performed an extensive field measurement campaign to evaluate and validate the system’s performance.
- We identify and measure the key parameters including received signal strengths, packet send/receipt, and response times between two experimental vehicles equipped with 802.11n cards. These field data form a rich data set to be used by system planners to predict the system’s performance in a similar parking lot elsewhere. We also evaluate and validate the system’s performance through various field experiments.
- We develop simulation models using OPNET Modeler to study the system’s performance. To this end, we design five practical simulation scenarios to analyze and validate the system’s performance.
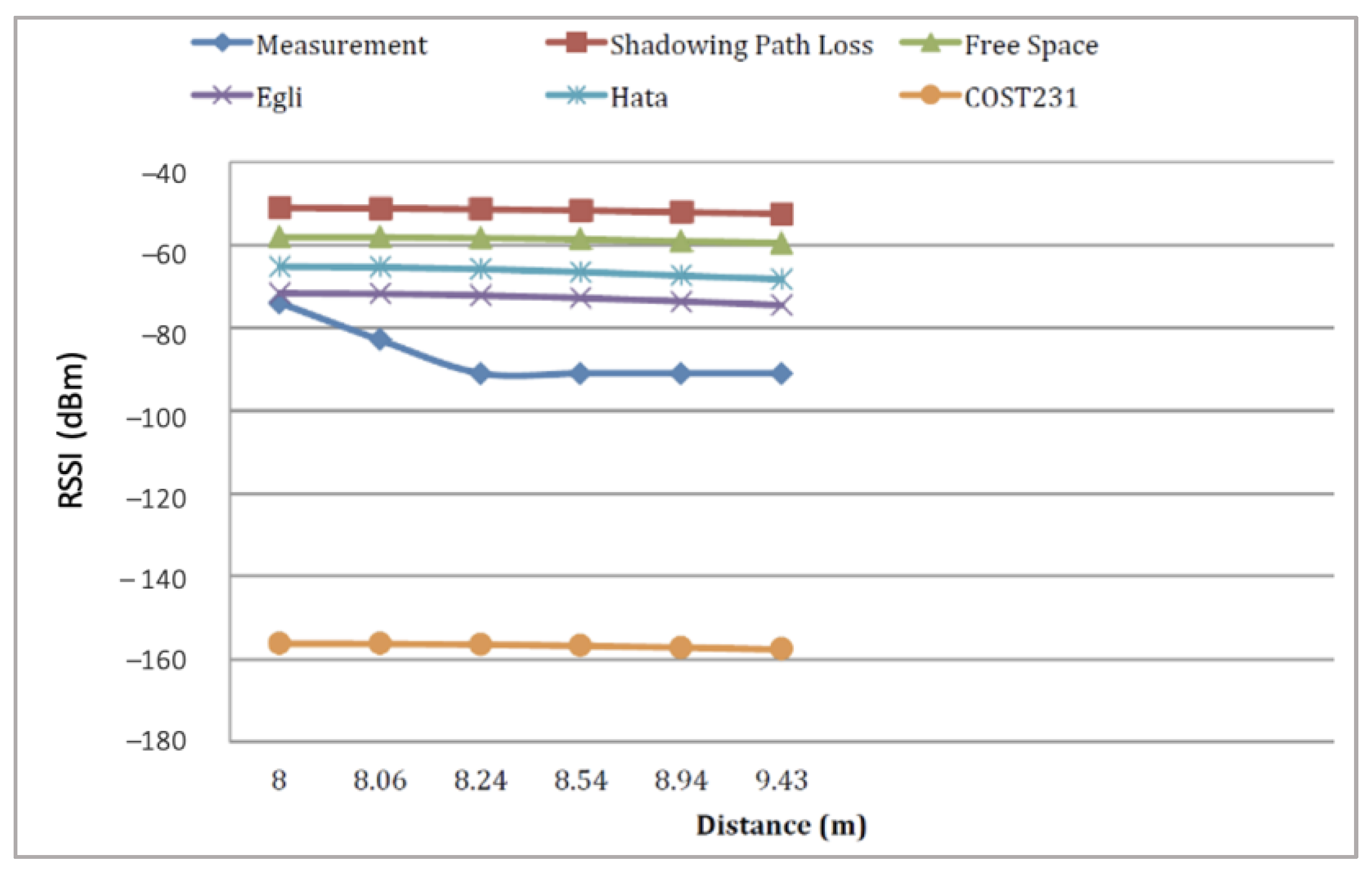
- We analyze and find the best fit model that closely matches the field data to the propagation models. We consider and analyze five well-known propagation models (Free Space, Shadowing Path Loss, Egli, Hata, and COST 231). We have selected these models due to their popularity and relevance to our study.
2. Background and Related Work
2.1. VANET Applications and Classifications
2.2. VANET Design Issues and Challenges
2.3. The 802.11 Protocol for VANET
3. Research Design
3.1. Performance Metrics
3.2. Hardware Specifications
3.3. Software Specifications
4. Results and Discussion
4.1. Measurement Environment
4.2. Measurement Scenarios
4.3. Field Measurement Results
4.4. Analysis of Results
4.5. Validation of the Results
5. Simulation Study
5.1. Modeling the Network
5.2. Simulation Results and Discussion
5.3. Model Validation
6. Propagation Models Versus Measurements
7. Practical Implications
- Identifying the VANET deployment requirements (a feasibility study) such as the facility required and any issues/restrictions for system deployment.
- Determining practical deployment scenarios such as shopping mall parking lots, single-floor, multi-floor, or campus environments.
- Identifying technical requirements such as the minimum signal strength, signal-to-noise ratio, delay/jitter tolerance, and the maximum transmitting power.
- Conducting preliminary field trial measurements for Wi-Fi-based VANETs using real hardware and software.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Total Number of licensed vehicles in New Zealand from 2014 to 2023, in Statista. 2023: New Zealand. Available online: https://www.statista.com/statistics/735099/new-zealand-currently-licensed-vehicles/#:~:text=There%20were%20approximately%204.5%20million,3.6%20million%20vehicles%20in%202014 (accessed on 14 November 2023).
- Raya, M.; Hubaux, J.-P. Securing vehicular ad hoc networks. J. Comput. Secur. 2007, 15, 39–68. [Google Scholar] [CrossRef]
- Naumov, V.; Baumann, R.; Gross, T. An evaluation of inter-vehicle ad hoc networks based on realistic vehicular traces. In Proceedings of the 7th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Florence, Italy, 22–25 May 2006. [Google Scholar]
- Lagraa, N.; Yagoubi, M.B.; Benkouider, S. Localization technique in VANets using Clustering (LVC). Int. J. Comput. Sci. Issues (IJCSI) 2010, 7, 10–16. [Google Scholar]
- Gaurav, A.; Gupta, B.B.; Chui, K.T. Edge Computing-Based DDoS Attack Detection for Intelligent Transportation Systems. In Cyber Security, Privacy and Networking: Proceedings of ICSPN 2021; Springer: Singapore, 2022; pp. 175–184. [Google Scholar]
- Lansky, J.; Rahmani, A.M.; Hosseinzadeh, M. Reinforcement Learning-Based Routing Protocols in Vehicular Ad Hoc Networks for Intelligent Transport System (ITS): A Survey. Mathematics 2022, 10, 4673. [Google Scholar] [CrossRef]
- Ahmad, F.; Adnane, A.; Franqueira, V.N.L.; Kurugollu, F.; Liu, L. Man-in-the-middle attacks in vehicular ad-hoc networks: Evaluating the impact of attackers’ strategies. Sensors 2018, 18, 4040. [Google Scholar] [CrossRef] [PubMed]
- Cunha, F.; Villas, L.; Boukerche, A.; Maia, G.; Viana, A.; Mini, R.A.F.; Loureiro, A.A.F. Data communication in VANETs: Protocols, applications and challenges. Ad Hoc. Netw. 2016, 44, 90–103. [Google Scholar] [CrossRef]
- Schoch, E.; Kargl, F.; Weber, M. Communication patterns in VANETs. IEEE Commun. Mag. 2008, 46, 119–125. [Google Scholar] [CrossRef]
- Tufail, A.; Fraser, M.; Hammad, A.; Hyung, K.K.; Yoo, S.W. An empirical study to analyze the feasibility of WIFI for VANETs. In Proceedings of the 2008 12th International Conference on Computer Supported Cooperative Work in Design, Xi’an, China, 16–18 April 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Boukerche, A.; Oliveira, H.A.; Nakamura, E.F.; Loureiro, A.A. Vehicular ad hoc networks: A new challenge for localization-based systems. Comput. Commun. 2008, 31, 2838–2849. [Google Scholar] [CrossRef]
- Zhao, L.; Bi, Z.; Hawbani, A.; Yu, K.; Zhang, Y.; Guizani, M. ELITE: An intelligent digital twin-based hierarchical routing scheme for softwarized vehicular networks. IEEE Trans. Mob. Comput. 2022, 22, 5231–5247. [Google Scholar] [CrossRef]
- Zhao, L.; Zhao, Z.; Zhang, E.; Hawbani, A.; Al-Dubai, A.Y.; Tan, Z.; Hussain, A. A Digital Twin-Assisted Intelligent Partial Offloading Approach for Vehicular Edge Computing. IEEE J. Sel. Areas Commun. 2023, 41, 3386–3400. [Google Scholar] [CrossRef]
- Echigo, H.; Cao, Y.; Bouazizi, M.; Ohtsuki, T. A deep learning-based low overhead beam selection in mmWave communications. IEEE Trans. Veh. Technol. 2021, 70, 682–691. [Google Scholar] [CrossRef]
- Cao, Y.; Ohtsuki, T.; Maghsudi, S.; Quek, T.Q.S. Deep Learning and Image Super-Resolution-Guided Beam and Power Allocation for mmWave Networks. IEEE Trans. Veh. Technol. 2023. [Google Scholar] [CrossRef]
- Wang, K.; Song, T.; Wang, Y.; Fang, C.; He, J.; Nirmalathas, A.; Lim, C.; Wong, E.; Kandeepan, S. Evolution of short-range optical wireless communications. J. Light. Technol. 2023, 41, 1019–1040. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for sidelink 5G V2X vehicular communications: A new 5G technology for short-range vehicle-to-everything communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Caliskan, M.; Graupner, D.; Mauve, M. Decentralized discovery of free parking places. In Proceedings of the 3rd International Workshop on Vehicular ad Hoc Networks, Los Angeles, CA, USA, 29 September 2006. [Google Scholar]
- Xu, B.; Ouksel, A.; Wolfson, O. Opportunistic resource exchange in inter-vehicle ad-hoc networks. In Proceedings of the IEEE International Conference on Mobile Data Management, Berkeley, CA, USA, 19–22 January 2004; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Nzouonta, J.; Rajgure, N.; Wang, G.; Borcea, C. VANET routing on city roads using real-time vehicular traffic information. IEEE Trans. Veh. Technol. 2009, 58, 3609–3626. [Google Scholar] [CrossRef]
- Liu, B.; Khorashadi, B.; Ghosal, D.; Chuah, C.N.; Zhang, M.H. Assessing the VANET’s local information storage capability under different traffic mobility. In Proceedings of the 2010 Proceedings IEEE INFOCOM, San Diego, CA, USA, 15–19 March 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Karim, R. VANET: Superior system for content distribution in vehicular network applications. Rutgers Univ. Dep. Comput. Sci. Tech. Rep. 2008, 364–370. Available online: https://people.cs.rutgers.edu/~rmartin/teaching/fall08/cs552/position-papers/011-01.pdf (accessed on 14 November 2023).
- Yamamoto, M.; Fujita, K.; Ohnishi, K.; Seto, M.; Kamata, K. Development of vehicle-infrastructure cooperative systems—Field operational test of hiroshima DSSS. In Proceedings of the ITS World Congress, New York, NY, USA, 16–20 November 2008. [Google Scholar]
- Hamdi, M.M.; Audah, L.; Rashid, S.A.; Mohammed, A.H.; Alani, S.; Mustafa, A.S. A review of applications, characteristics and challenges in vehicular ad hoc networks (VANETs). In Proceedings of the 2020 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 26–27 June 2020; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Sharma, B.; Sharma, M.S.P.; Tomar, R.S. A survey: Issues and challenges of vehicular ad hoc networks (VANETs). In Proceedings of the International Conference on Sustainable Computing in Science, Technology and Management (SUSCOM), Amity University Rajasthan, Jaipur, India, 26–28 February 2019. [Google Scholar]
- Talukder, S.; Ira, S.T.B.; Khanom, A.; Sneha, P.B.; Saleh, W. A survey on 802.11 MAC industrial standards, architecture, security & supporting emergency traffic: Future directions. J. Ind. Inf. Integr. 2021, 24, 100225. [Google Scholar]
- Abdulshaheed, H.R.; Yaseen, Z.T.; Salman, A.M.; Al_Barazanchi, I. Vehicle Collision Detection & Prevention Using VANET Based IoT with V2V. arXiv 2022, arXiv:2205.07815. [Google Scholar]
- Abdulshaheed, H.R.; Yaseen, Z.T.; Salman, A.M.; Al_Barazanchi, I. A survey on the use of WiMAX and Wi-Fi on vehicular ad-hoc networks (VANETs). In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Assiut, Egypt, 2020. [Google Scholar]
- Martelli, F.; Renda, M.E.; Santi, P.; Volpetti, M. Measuring voip performance in ieee 802.11 p vehicular networks. In Proceedings of the 2012 IEEE 75th Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 6–9 May 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Ramteke, M.A.; Krishna, R. Realistic simulation for vehicular ad-hoc network using ZigBee technology. Int. J. Eng. 2012, 1, 1–5. [Google Scholar]
- Ho, I.W.-H.; Leung, K.K.; Polak, J.W. A methodology for studying vanet performance with practical vehicle distribution in urban environment. arXiv 2012, arXiv:1211.6251. [Google Scholar]
- Grilli, G. Data Dissemination in Vehicular Networks. Ph.D. Thesis, University of Rome, Tor Vergata, Italy, 2010. [Google Scholar]
- Buchenscheit, A.; Schaub, F.; Kargl, F.; Weber, M. A VANET-based emergency vehicle warning system. In Proceedings of the 2009 IEEE Vehicular Networking Conference (VNC), Tokyo, Japan, 28–30 October 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Perahia, E. IEEE 802.11 n development: History, process, and technology. IEEE Commun. Mag. 2008, 46, 48–55. [Google Scholar] [CrossRef]
- Qian, Y.; Moayeri, N. Design of secure and application-oriented VANETs. In Proceedings of the VTC Spring 2008-IEEE Vehicular Technology Conference, Singapore, 11–14 May 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Corson, S.; Macker, J. RFC2501: Mobile ad Hoc Networking (MANET): Routing Protocol Performance Issues and Evaluation Considerations. RFC Editor. 1999. Available online: https://www.rfc-editor.org/rfc/rfc2501.html (accessed on 14 November 2023).
- Sarkar, N.I.; Sowerby, K.W. Wi-Fi performance measurements in the crowded office environment: A case study. In Proceedings of the 2006 International Conference on Communication Technology, Guilin, China, 27–30 November 2006; IEEE: Piscataway, NJ, USA, 2006. [Google Scholar]
- Sarkar, N.I.; Lo, E. Indoor propagation measurements for performance evaluation of IEEE 802.11 g. In Proceedings of the 2008 Australasian Telecommunication Networks and Applications Conference, Adelaide, SA, Australia, 7–10 December 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Sarkar, N.I.; Lo, E. Performance studies of 802.11 g for various AP configuration and placement. In Proceedings of the 2011 IEEE Symposium on Computers & Informatics, Kuala Lumpur, Malaysia, 20–23 March 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Definition | Abbreviation | Definition |
|---|---|---|---|
| AP | Access Point | ms | Milliseconds |
| AODV | Ad hoc On-demand Distance Vector | mW | Milliwatts |
| BSS | Basic Service Set | NLOS | Non-Line of Sight |
| CA | Collision Avoidance | OPNET | Optimized Network Engineering Tool |
| CICAS | Cooperative Intersection Collision Avoidance Systems Initiative | P2P | Peer-to-Peer |
| CPU | Central Processing Unit | PER | Packet Error Rate |
| CSMA | Carrier Sense Multiple Access | PCF | Point Coordination Function |
| dB | Decibel | PLCP | Physical Layer Convergence Protocol |
| dBm | dB-milliwatts | PMD | Physical Medium |
| DCF | Distributed Coordinated Function | PHY | Physical Layer |
| DSSS | Driving Safety Support Systems | OSI | Open Systems Interconnection model |
| EDCA | Enhanced Distributed Channel Access | QoS | Quality of Service |
| ESS | Extended Service Set | RF | Radio Frequency |
| FHSS | Frequency-Hopping Spread Spectrum | RSSI | Received Signal Strength Indicator |
| FSPL | Free-space Path Loss | RSU | Roadside Equipment |
| FTP | File Transfer Protocol | RWP | Random Way Point |
| GPS | Global Positioning System | SNR | Signal-to-Noise Ratio |
| IBSS | Independent Basic Service Set | SRD | Short Range Destination |
| ISM | Information Systems Management | SSID | Service Set Identifier |
| IR | Infrared | TCP | Transmission Control Protocol |
| ITS | Intelligent Transportation Systems | UDP | User Datagram Protocol |
| IVC | Inter Vehicular Communications | VANET | Vehicular Ad hoc Network |
| IWF | Information Warning Function | VCWS | Vehicle Collision Warning Systems |
| LAN | Local-Area Network | V2I | Vehicle to Infrastructure |
| LLC | Logical Link Control | V2R | Vehicle-to-Roadside |
| MAC | Medium Access Control | V2V | Vehicle-to-Vehicle |
| MANET | Mobile Ad hoc Network | WAVE | Wireless Access in Vehicular Environment |
| MH | Map Hack | WDS | Wireless Distribution System |
| MPDU | MAC Protocol Data Unit | WLAN | Wireless Local-Area Network |
| mu | Microseconds | WMN | Wireless Mash Network |
| Technique | Localization Accuracy | ||
|---|---|---|---|
| Low | Medium | High | |
| Routing | x | - | - |
| Data Dissemination | x | - | - |
| Map Localization | x | - | - |
| Coop. Adapt. Cruise Control Coop. Intersection Safety | - | x | - |
| Blind Crossing | - | x | - |
| Platooning | - | x | - |
| Vehicle Col. Warn. System Vision Enhancement | - | x | - |
| Automatic Parking | - | - | x |
| Vision Enhancement | - | - | x |
| Researcher | Main Contribution | Year | Key Concept/Description |
|---|---|---|---|
| Talukder et al. [27] | Investigated V2V communication. | 2022 | Analyzes the emergency alert system in case of vehicle collision. |
| Haider et al. [28] | Wi-Fi/WiMAX for VANETs | 2020 | Surveys WiMAX and WiFi for VANETs. |
| Martelli et al. [29] | VoIP performance in a IEEE 802.11p VANET | 2012 | VoIP performance in IEEE 802.11p-based VANET with on-the-field measurements. |
| Ramteke and Krishna [30] | VANET using ZigBee | 2012 | Uses AODV simulation evaluation. |
| Ho et al. [31] | VANET performance | 2012 | Analyzes protocol performance in a VANET. |
| Liu et al. [21] | Assessing VANETs under different traffic mobility | 2010 | Analyzes and formulates the “storage capability” of VMesh (one-way and highway). |
| Grilli [32] | VANET data dissemination | 2010 | 802.11g, Bluetooth, ZigBee, and WAVE. |
| Lagraa [4] | VANET clustering | 2010 | GPS localization in VANET clustering. |
| Nzouonta et al. [20] | VANET simulation | 2009 | GPS receivers, communications, and radars. |
| Buchenscheit et al. [33] | VANET Vehicle Warning | 2009 | Developed a system prototype. |
| Tufail et al. [10] | Wi-Fi-based VANETs | 2008 | Feasibility of Wi-Fi based VANETs. |
| Karim [22] | Vehicular applications | 2008 | 802.11p for roadside communication. |
| Perahia [34] | Vehicular ad hoc network | 2008 | Propagation models used in VANET. |
| Qian and Moayeri [35] | Secure VANETs | 2008 | Proposes a secure framework for VANETs. |
| Equipment | Specifications |
|---|---|
| Laptop 1 | Vendor: Acer Model: Aspire E1-531 Processor: Intel (R) Pentium (R) CPU: 2.2 GHz (2 CPUs) Memory: 8 GB Operating systems: Windows 8 64-bit |
| Laptop 2 | Vendor: Hewlett Packard Model: HP Elitebook 2570p Processor: Intel (R) core (TM) i5-3360M CPU: 2.8 GHz Memory: 8 GB Operating systems: Windows 7 professional 64-bit |
| IEEE 802.11n USB Wireless Adapter | Vendor: OutLink Model: 0301SH300278 Wireless Standards: IEEE 802.11n, IEEE 802.11g, IEEE 802.11b Output Power: 300 Mbps Frequency band: 2.4 GHz Channel: 1–14 channels Data Security: 16/128-bit WEP Encryption WPA, WPA-PSK, WPA2, WPA2-PSK, TKIP/AES Host Interface: High speed USB2.0/1.1 Interface 38 |
| IEEE 802.11n 2.4 GHz | Vendor: D-link Model: ANT24-0700 Directivity: Omni-Directional Indoor Antenna Frequency Range: 2.4 GHz to 2.5 GHz Power Level of Antenna: 7dbi HPBW/H-Plane (Horizontal): 360 degrees |
| Scenario | Description |
|---|---|
| 1 | In Level 1 of the field trial, two cars (TX and RX) were positioned 1 m apart to study the effects of gradually increasing the distance between them. The purpose was to determine the maximum communication range between the two vehicles. Scenario 1 involved sharing a text and image file and collecting data on signal strength, data rate, and transmission time. |
| 2 | In scenario 2, the field trial involved placing the TX on Level 1 and the RX on Level 2, with a 4 m distance between them. The purpose was to study the impact of gradually increasing the distance between the TX and RX in small increments to determine the maximum communication range between the two vehicles. This scenario involved sharing a text file and an image file, and data on signal strength, data rate, and transmission time were collected to gain insights into the quality of the communication. |
| 3 | In scenario 3, the field trial involved placing the TX on Level 1 and the RX on Level 3, with an 8 m distance between them. The objective was to examine the effects of gradually increasing the distance between the TX and RX in small increments to determine the maximum communication range between the two vehicles. The scenario included sharing a text file and image file, and data on signal strength, data rate, and transmission time were collected to gain insights into the quality of the communication. |
| 4 | In scenario 4, the field trial involved placing the TX on Level 1 and the RX on Level 4, with a 12 m distance between them. The purpose was to investigate the effects of gradually increasing the distance between the TX and RX in small increments to determine the maximum communication range between the two vehicles. The scenario included sharing a text file and image file, and data on signal strength, data rate, and transmission time were collected to gain insights into the performance of the communication. |
| 5 | In scenario 5, the field trial involved parking on the road with a minimum distance of 1 m between Level 1 and the road surface. The objective was to investigate the effects of gradually increasing the distance between the TX and RX in small increments to determine the maximum communication range between the two vehicles. During this scenario, a text file and an image file were shared, and data on signal strength, data rate, and transmission time were collected to gain insights into the quality of the communication. |
| Parameter | Value |
|---|---|
| Network scale | Office |
| Area | 50 × 100 Square meters |
| Network size (number of nodes) | Up to 50 |
| Mobility model | Random way point |
| Data rate | 26 Mbps (base/240 Mbps (max)) |
| Physical characteristics | HT PHY 2.4 GHz (802.11n) |
| Transmit power (W) | 0.005 |
| Packet reception power | −92 dBm |
| Channel | Auto assign |
| Buffer size (bits) | 256,000 |
| FTP traffic | Low load (1000 bytes) Medium load (5000 bytes) High load (50,000 bytes) |
| P2P file sharing | Low traffic: Minimum outcome 10,000 (bytes) Maximum outcome 100,000 (bytes) High traffic: Minimum outcome 100,000 (bytes) Maximum outcome 10,000,000 (bytes) |
| Simulation time | 300 s |
| Parameter | Value |
|---|---|
| Frequency (f) | 2.4 GHz |
| Speed of light (c) | 3 × 108 m/s |
| Wavelength (λ) | 0.125 m |
| Linear size of the antenna (D) | 0.25 m |
| Reference distance (d0) | 1 m |
| Power of radio wave on the transmitting antenna (Pt) | 0.03162 W |
| Power of radio wave on the reference distance (Pr = d0) | 3.93 × 10−5 W |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarkar, N.I.; Ahmed, F.; Gul, S. Deploying a Low-Cost Wi-Fi-Based Vehicular Ad Hoc Network in a Shopping Mall Parking Lot: An Empirical Study. Electronics 2023, 12, 4672. https://doi.org/10.3390/electronics12224672
Sarkar NI, Ahmed F, Gul S. Deploying a Low-Cost Wi-Fi-Based Vehicular Ad Hoc Network in a Shopping Mall Parking Lot: An Empirical Study. Electronics. 2023; 12(22):4672. https://doi.org/10.3390/electronics12224672
Chicago/Turabian StyleSarkar, Nurul I., Foysal Ahmed, and Sonia Gul. 2023. "Deploying a Low-Cost Wi-Fi-Based Vehicular Ad Hoc Network in a Shopping Mall Parking Lot: An Empirical Study" Electronics 12, no. 22: 4672. https://doi.org/10.3390/electronics12224672