
Adaptive Fractional Prescribed Performance Control for Micro-Electromechanical System Gyros Using a Modified Neural Estimator

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- A constrained signal mapping mechanism is introduced to map the input signals of the neural network into a predefined range with a fixed boundary, which can thus guide neural network parameter initialization.
- A modified neural network-based estimator is proposed to dynamically estimate gyro dynamics, and the neural estimator is incorporated into the prescribed performance control structure to ensure safe gyro operation under time-varying angular rates. The proposed control method thereby has a broader range of applications.
- Fractional calculus is integrated with the proposed adaptive neural prescribed performance method to provide more flexibility in adjusting gyro dynamics. The involvement of fractional calculus in the controller design as well as the adaptive laws can jointly contribute to the overall quality of gyro vibration performance.
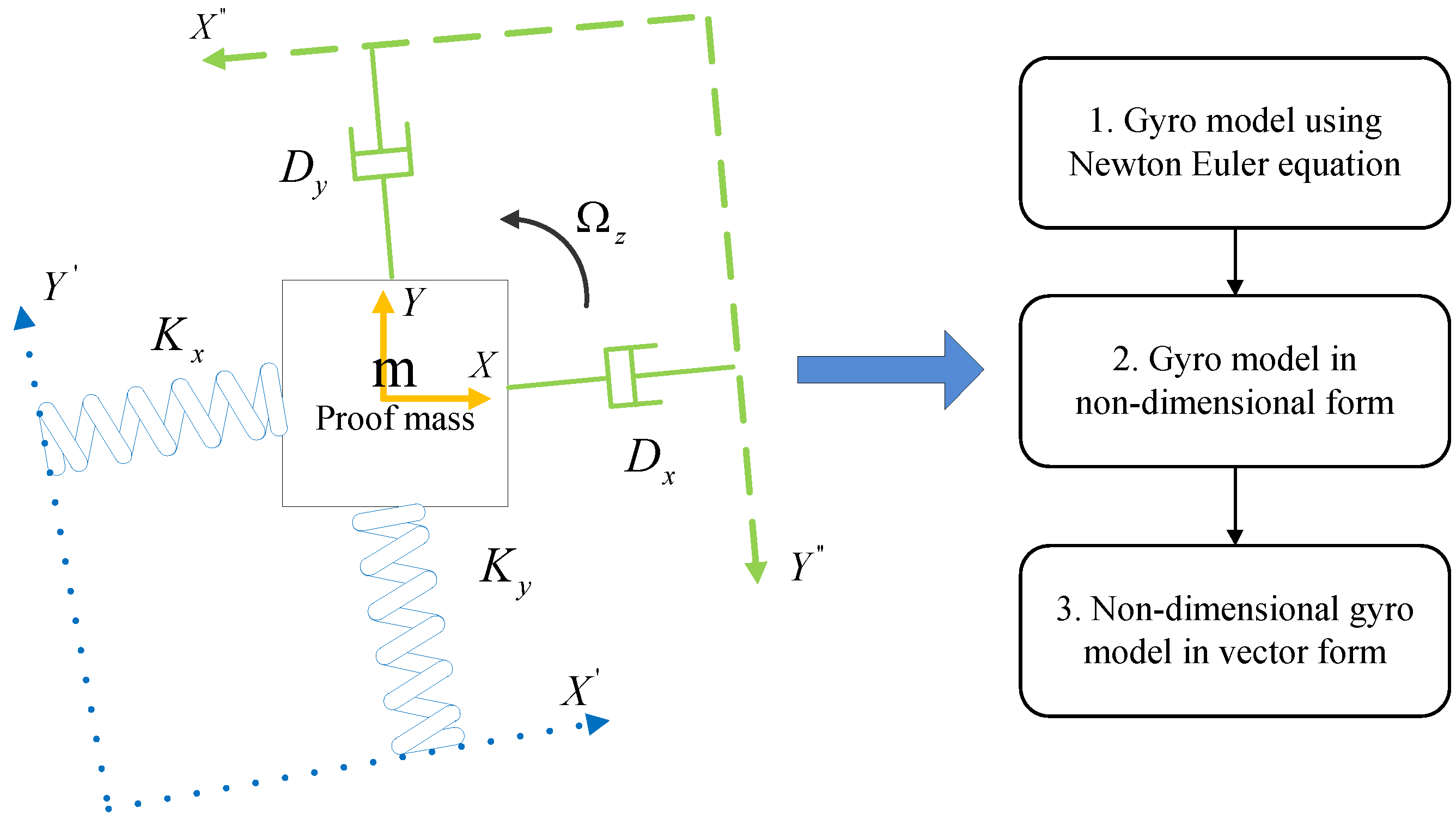
2. Structure and Dynamic of Z-Axis Vibrating Gyro System
3. Design of Adaptive Fractional Neural Prescribed Performance Control for MEMS Gyro
3.1. Prescribed Performance Control for Gyro Using Fractional-Order Sliding Manifold
3.2. Design of Prescribed Performance Sliding Mode Control Using Modified Neural Network for MEMS Gyro
4. Simulation Study
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gu, H.; Su, W.; Zhao, B.; Zhou, H.; Liu, X. A Design Methodology of Digital Control System for MEMS Gyroscope Based on Multi-Objective Parameter Optimization. Micromachines 2020, 11, 75. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Xiao, D.; Wu, X.; Su, J.; Chen, Z.; Hou, Z.; Wang, X. Enhanced Temperature Stability of Sensitivity for MEMS Gyroscope Based on Frequency Mismatch Control. Microsyst. Technol. 2017, 23, 3311–3317. [Google Scholar] [CrossRef]
- Hosseini-Pishrobat, M.; Keighobadi, J. Robust Vibration Control and Angular Velocity Estimation of a Single-Axis MEMS Gyroscope Using Perturbation Compensation. J. Intell. Robot. Syst. 2019, 94, 61–79. [Google Scholar] [CrossRef]
- Apostolyuk, V. Coriolis Vibratory Gyroscopes: Theory and Design, 1st ed.; Springer International Publishing: Cham, Switzerland, 2015; ISBN 978-3-319-22198-4. [Google Scholar]
- Bu, F.; Guo, S.; Fan, B.; Wang, Y. Effect of Quadrature Control Mode on ZRO Drift of MEMS Gyroscope and Online Compensation Method. Micromachines 2022, 13, 419. [Google Scholar] [CrossRef] [PubMed]
- Armenise, M.N.; Ciminelli, C.; Dell’Olio, F.; Passaro, V.M.N. Advances in Gyroscope Technologies; Springer: Berlin/Heidelberg, Germany, 2011; ISBN 978-3-642-15493-5. [Google Scholar]
- Wen, H. Toward Inertial-Navigation-on-Chip: The Physics and Performance Scaling of Multi-Degree-of-Freedom Resonant MEMS Gyroscopes; Springer Theses; Springer International Publishing: Cham, Switzerland, 2019; ISBN 978-3-030-25469-8. [Google Scholar]
- Acar, C.; Shkel, A. MEMS Vibratory Gyroscopes: Structural Approaches to Improve Robustness; MEMS Reference Shelf; Springer US: Boston, MA, USA, 2009; ISBN 978-0-387-09535-6. [Google Scholar]
- Rahmani, M.; Redkar, S. Optimal Control of a MEMS Gyroscope Based on the Koopman Theory. Int. J. Dynam. Control 2023, 11, 2256–2264. [Google Scholar] [CrossRef]
- Shao, X.; Si, H.; Zhang, W. Low-Frequency Learning Quantized Control for MEMS Gyroscopes Accounting for Full-State Constraints. Eng. Appl. Artif. Intell. 2022, 115, 104724. [Google Scholar] [CrossRef]
- Zhang, R.; Xu, B.; Wei, Q.; Zhang, P.; Yang, T. Harmonic Disturbance Observer-Based Sliding Mode Control of MEMS Gyroscopes. Sci. China Inf. Sci. 2021, 65, 139201. [Google Scholar] [CrossRef]
- Rahmani, M. MEMS Gyroscope Control Using a Novel Compound Robust Control. ISA Trans. 2018, 72, 37–43. [Google Scholar] [CrossRef]
- Kant, K.; Kumar Paswan, R.; Ahmad, I.; Prakash Sinha, A. Digital Control and Readout of MEMS Gyroscope Using Second-Order Sliding Mode Control. IEEE Sens. J. 2022, 22, 20567–20574. [Google Scholar] [CrossRef]
- Rahmani, M.; Komijani, H.; Ghanbari, A.; Ettefagh, M.M. Optimal Novel Super-Twisting PID Sliding Mode Control of a MEMS Gyroscope Based on Multi-Objective Bat Algorithm. Microsyst. Technol. 2018, 24, 2835–2846. [Google Scholar] [CrossRef]
- Hua, C.; Ning, P.; Li, K.; Guan, X. Fixed-Time Prescribed Tracking Control for Stochastic Nonlinear Systems with Unknown Measurement Sensitivity. IEEE Trans. Cybern. 2022, 52, 3722–3732. [Google Scholar] [CrossRef]
- Ilchmann, A.; Ryan, E.P.; Sangwin, C.J. Tracking with Prescribed Transient Behaviour. ESAIM Control Optim. Calc. Var. 2002, 7, 471–493. [Google Scholar] [CrossRef]
- Wei, C.; Chen, Q.; Liu, J.; Yin, Z.; Luo, J. An Overview of Prescribed Performance Control and Its Application to Spacecraft Attitude System. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 435–447. [Google Scholar] [CrossRef]
- Zirkohi, M.M. Adaptive Backstepping Control Design for MEMS Gyroscope Based on Function Approximation Techniques with Input Saturation and Output Constraints. Comput. Electr. Eng. 2022, 97, 107547. [Google Scholar] [CrossRef]
- Shao, X.; Si, H.; Zhang, W. Fuzzy Wavelet Neural Control with Improved Prescribed Performance for MEMS Gyroscope Subject to Input Quantization. Fuzzy Sets Syst. 2021, 411, 136–154. [Google Scholar] [CrossRef]
- Shi, Y.; Shao, X.; Yang, W.; Zhang, W. Event-Triggered Output Feedback Control for MEMS Gyroscope with Prescribed Performance. IEEE Access 2020, 8, 26293–26303. [Google Scholar] [CrossRef]
- Esmaeili, S.M.; Zahedifar, R.; Keymasi-Khalaji, A. Fault-Tolerant Fixed-Time Prescribed Performance Control of MEMS Gyroscope. IET Control Theory Appl. 2023, 17, 1509–1521. [Google Scholar] [CrossRef]
- Zhang, R.; Xu, B.; Zhao, W. Finite-Time Prescribed Performance Control of MEMS Gyroscopes. Nonlinear Dyn. 2020, 101, 2223–2234. [Google Scholar] [CrossRef]
- Zirkohi, M.M. Adaptive Interval Type-2 Fuzzy Recurrent RBFNN Control Design Using Ellipsoidal Membership Functions with Application to MEMS Gyroscope. ISA Trans. 2022, 119, 25–40. [Google Scholar] [CrossRef]
- Si, H.; Shao, X.; Zhang, W. MLP-Based Neural Guaranteed Performance Control for MEMS Gyroscope with Logarithmic Quantizer. IEEE Access 2020, 8, 38596–38605. [Google Scholar] [CrossRef]
- Li, F.; Luo, S.; He, S.; Ouakad, H.M. Dynamical Analysis and Accelerated Adaptive Backstepping Control of MEMS Triaxial Gyroscope with Output Constraints. Nonlinear Dyn 2023, 111, 17123–17140. [Google Scholar] [CrossRef]
- Fei, J. Adaptive Sliding Mode Control of Dynamic Systems Using Double Loop Recurrent Neural Network Structure. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 1275–1287. [Google Scholar] [CrossRef]
- Fei, J.; Lu, C. Adaptive Fractional Order Sliding Mode Controller with Neural Estimator. J. Frankl. Inst. 2018, 355, 2369–2391. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. A Low-Complexity Global Approximation-Free Control Scheme with Prescribed Performance for Unknown Pure Feedback Systems. Automatica 2014, 50, 1217–1226. [Google Scholar] [CrossRef]
- Construction and Experimental Realization of the Fractional-Order Transformer by Oustaloup Rational Approximation Method-All Databases. Available online: https://elksslb16f0b771852298d11f77e4cacca3269lib.v.ntu.edu.cn:4443/wos/alldb/full-record/WOS%3A000966153600001 (accessed on 19 September 2023).
- Zhou, Q.; Shi, P.; Tian, Y.; Wang, M. Approximation-Based Adaptive Tracking Control for MIMO Nonlinear Systems with Input Saturation. IEEE Trans. Cybern. 2015, 45, 2119–2128. [Google Scholar] [CrossRef]
- Error Bounds for Approximations with Deep ReLU Networks—ScienceDirect. Available online: https://elkssle00fc0d2d668841684b2702a17387e5elib.v.ntu.edu.cn:4443/science/article/pii/S0893608017301545?via%3Dihub (accessed on 19 September 2023).
- Lyapunov Conditions for Uniform Asymptotic Output Stability and a Relaxation of Barbalat’s Lemma-All Databases. Available online: https://elksslb16f0b771852298d11f77e4cacca3269lib.v.ntu.edu.cn:4443/wos/alldb/full-record/WOS%3A000689475700004 (accessed on 19 September 2023).











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, C.; Wen, Z.; Luo, L.; Guo, Y.; Zhang, X. Adaptive Fractional Prescribed Performance Control for Micro-Electromechanical System Gyros Using a Modified Neural Estimator. Electronics 2023, 12, 4409. https://doi.org/10.3390/electronics12214409
Lu C, Wen Z, Luo L, Guo Y, Zhang X. Adaptive Fractional Prescribed Performance Control for Micro-Electromechanical System Gyros Using a Modified Neural Estimator. Electronics. 2023; 12(21):4409. https://doi.org/10.3390/electronics12214409
Chicago/Turabian StyleLu, Cheng, Zhiwei Wen, Laiwu Luo, Yunxiang Guo, and Xinsong Zhang. 2023. "Adaptive Fractional Prescribed Performance Control for Micro-Electromechanical System Gyros Using a Modified Neural Estimator" Electronics 12, no. 21: 4409. https://doi.org/10.3390/electronics12214409