
A 62 ppm MDR Deviation and Sub-250 ns MTIE Railway Balise
 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Design of the Energy Extraction Circuit
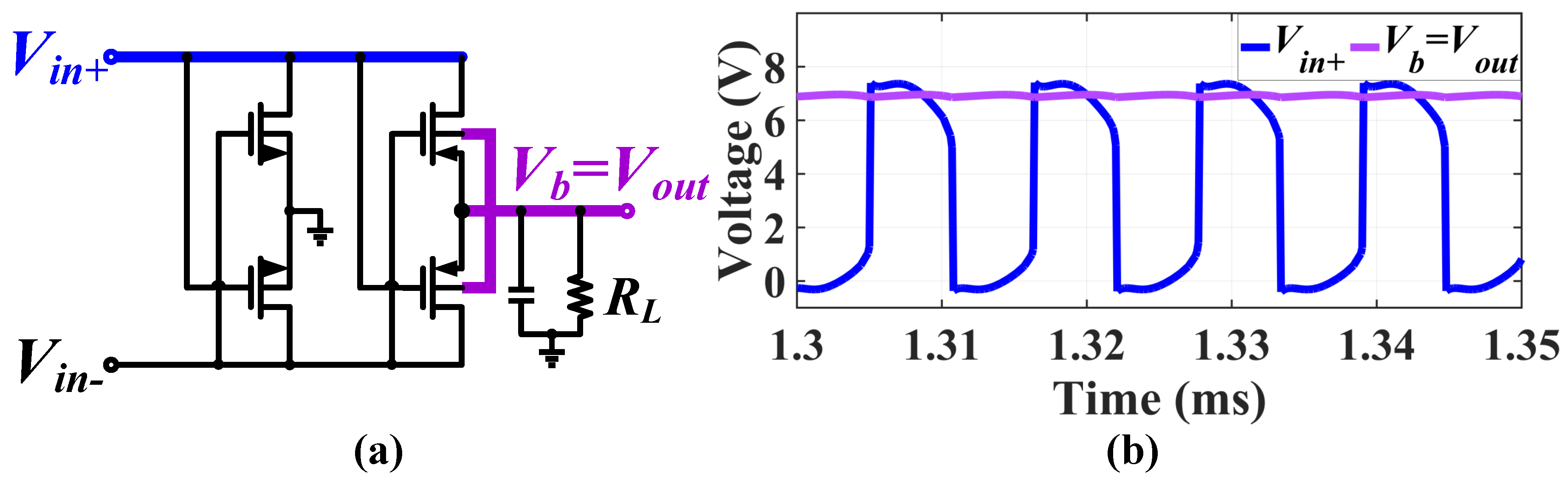
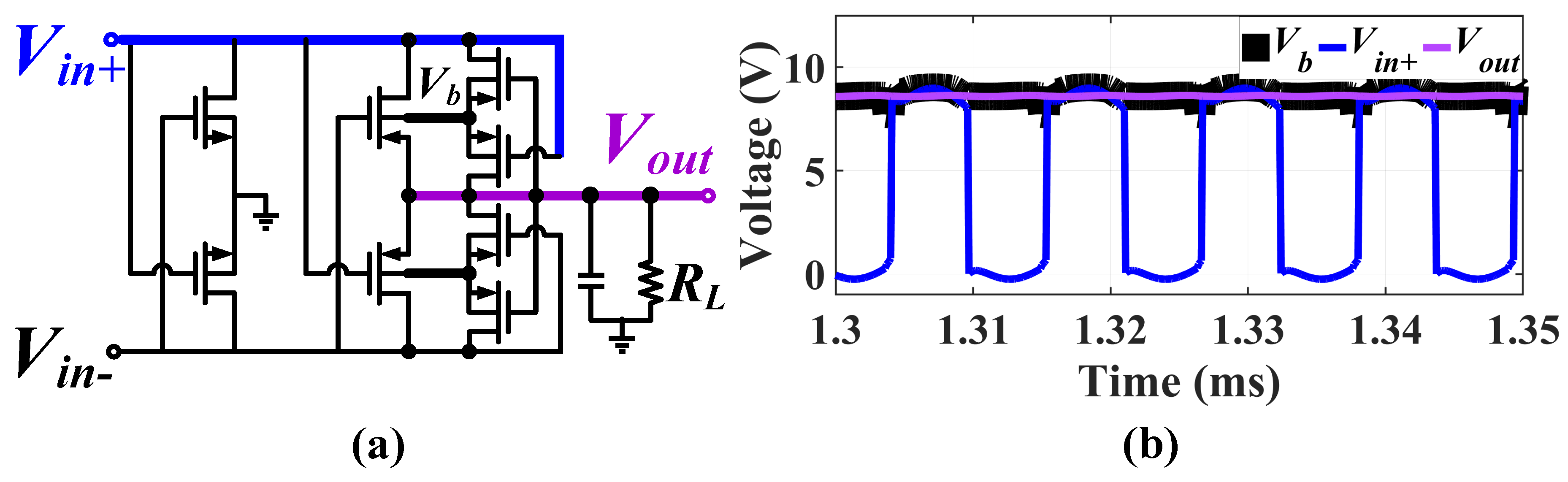
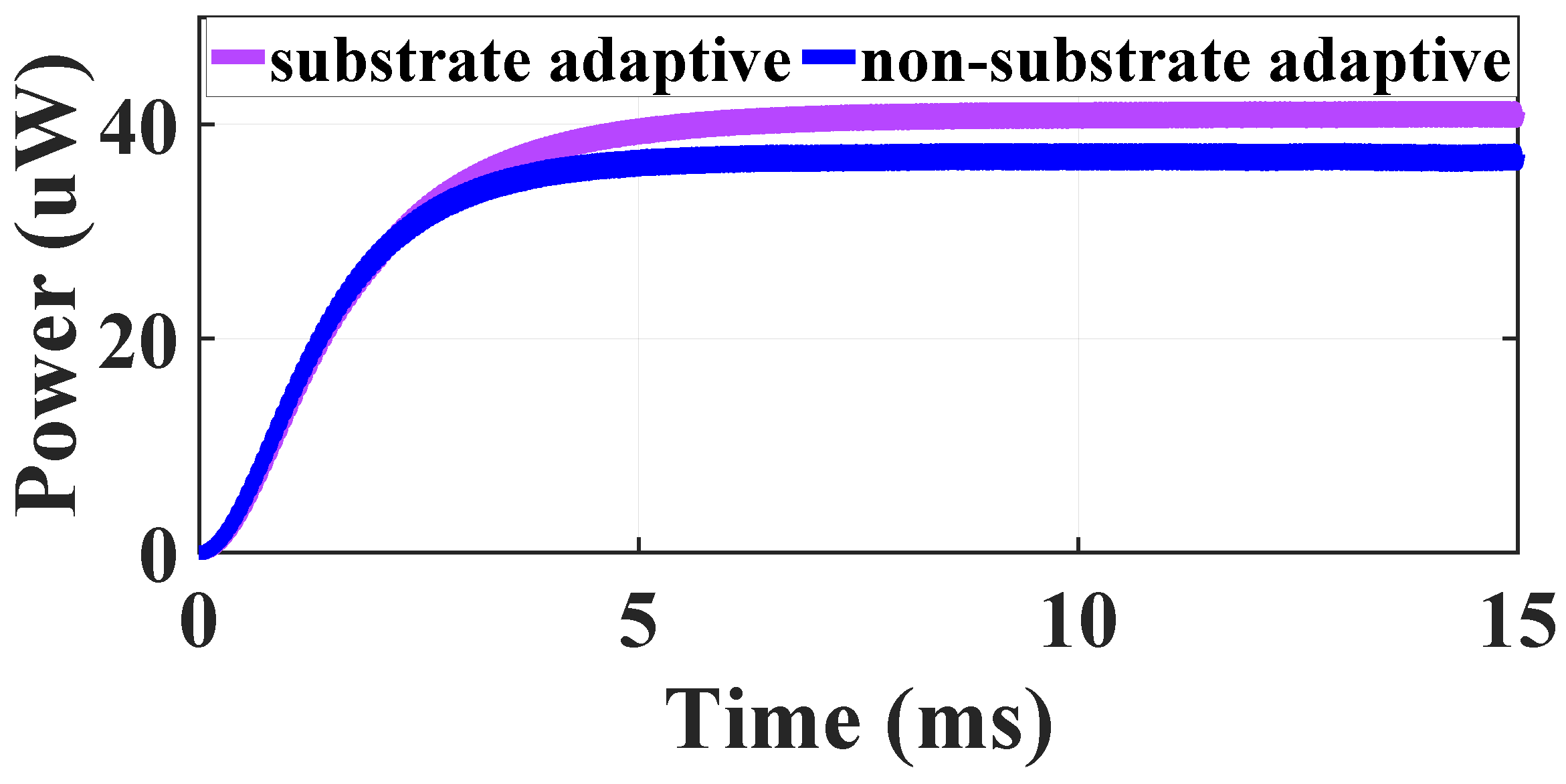
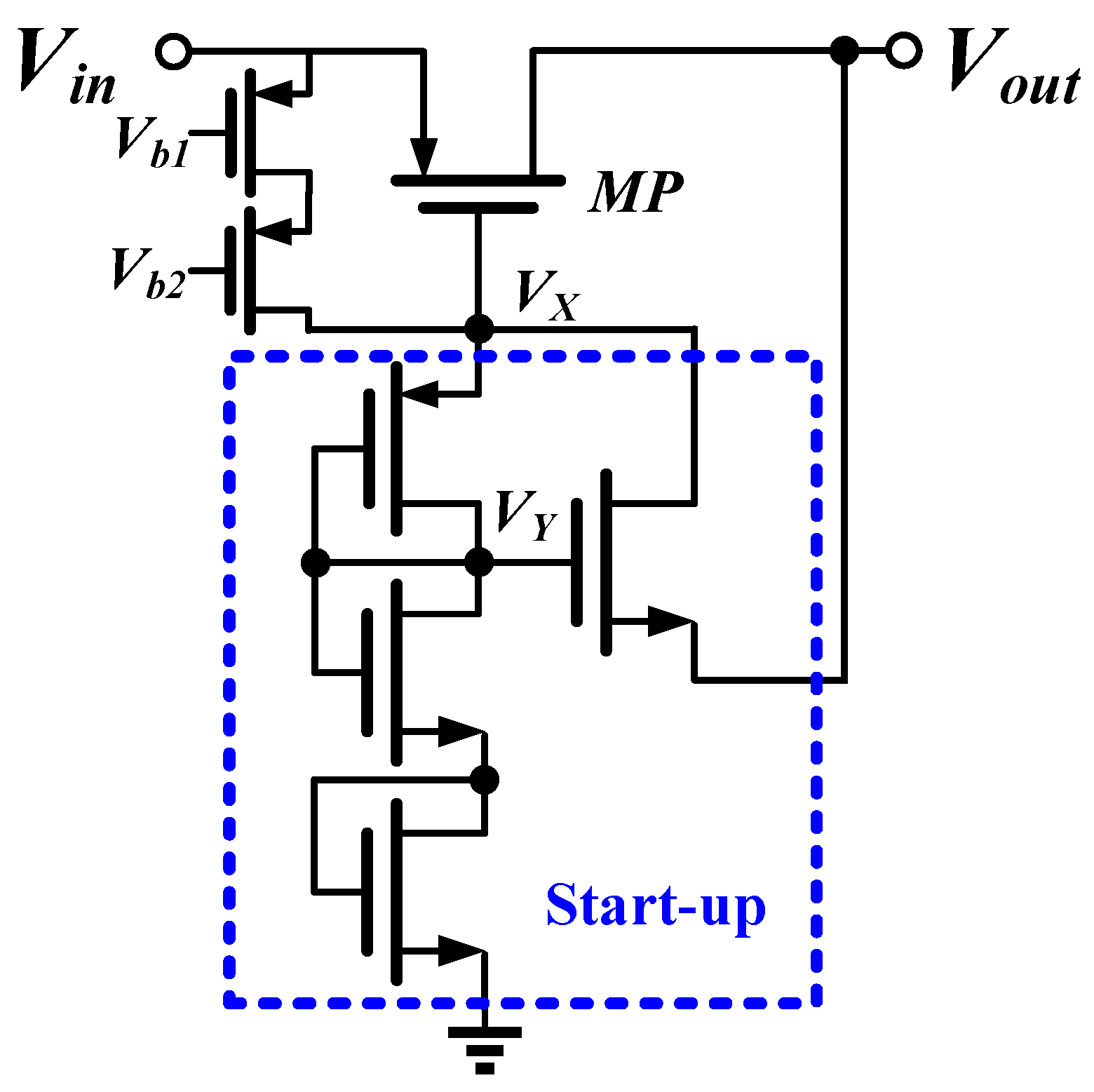
2.1.1. Substrate-Adaptive Rectifier
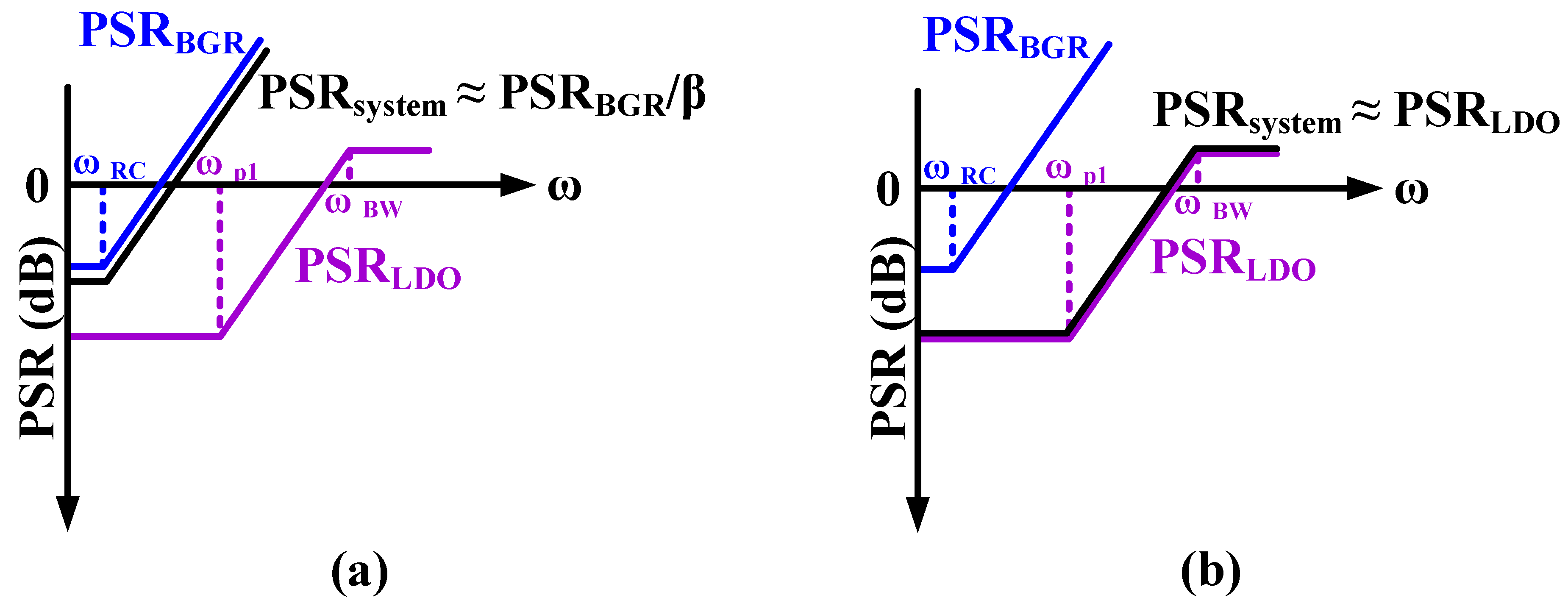
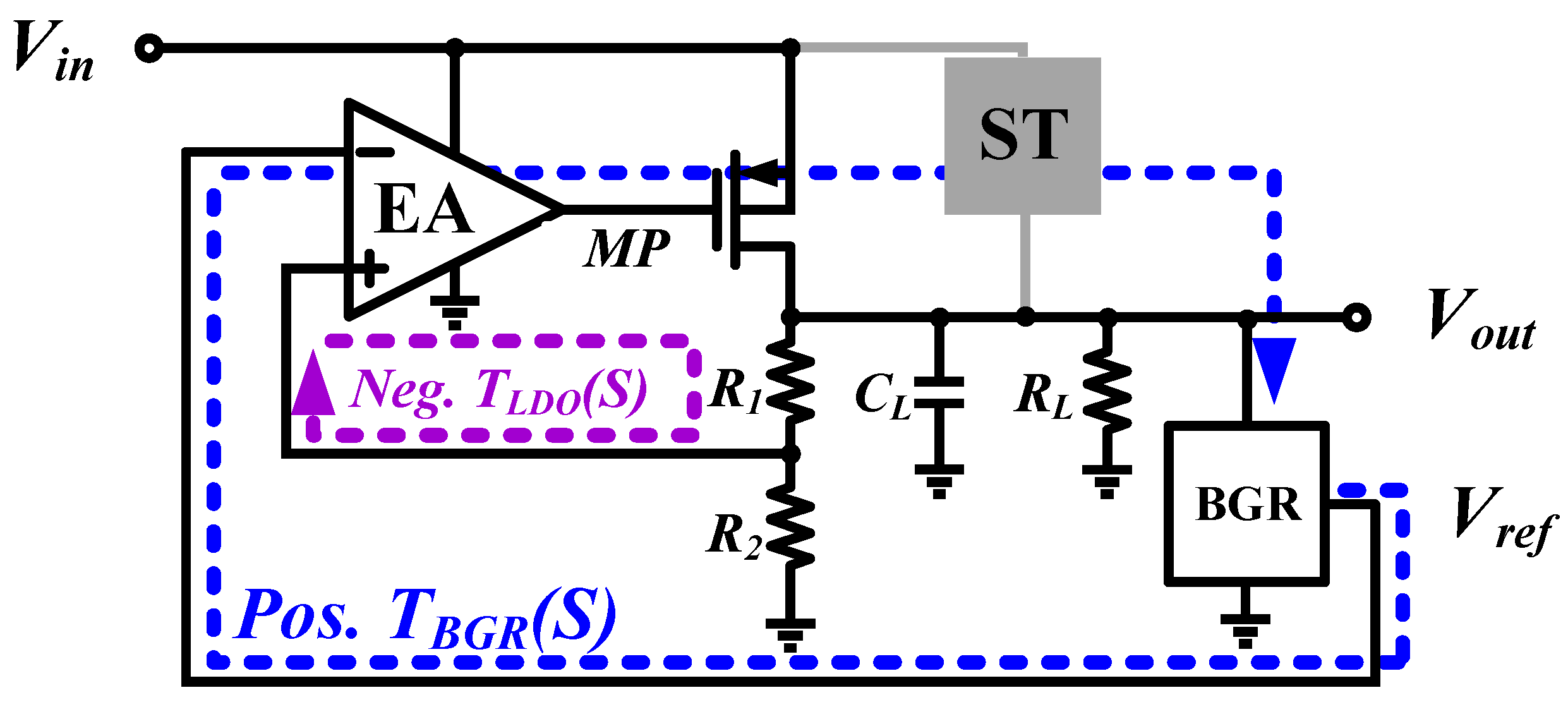
2.1.2. BGR–LDO Feedback Regulator
2.2. Design of the Clock Data Recovery Circuit
3. Results
3.1. The Integration Result
3.2. Energy Extraction Circuit
3.3. Clock Recovery Circuit
3.4. Balise System
3.4.1. Mean Data Rate
3.4.2. Maximum Time Interval Error
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- System Requirements Specification Chapter 7 ERTMS/ETCS Language, Version 3.4.0; European Union Agency Railways Std: Valenciennes, France, 2014.
- FFFIS for Eurobalise, Version 3.0.0; European Union Agency Railways Std: Valenciennes, France, 2012.
- Wu, Y.; Wei, Z.; Weng, J.; Deng, R.H. Position Manipulation Attacks to Balise-Based Train Automatic Stop Control. IEEE Trans. Veh. Technol. 2018, 67, 5287–5301. [Google Scholar] [CrossRef]
- Rodriguez, L.; Pinedo Zamalloa, C.; López Orbe, I.; Aguado Castrillo, M.; Astorga Burgo, J.; Higuero Aperribay, M.V.; Adin, I.; Bistué, G.; Mendizabal, J. Eurobalise-train communication modeling to assess interferences in railway control signaling systems. Netw. Protoc. Algorithms 2016, 8, 58–72. [Google Scholar] [CrossRef]
- Lim, H.W.; Temple, W.G.; Tran, B.A.N.; Chen, B.; Kalbarczyk, Z.; Zhou, J. Data Integrity Threats and Countermeasures in Railway Spot Transmission Systems. ACM Trans. Cyber-Phys. Syst. 2020, 4, 1–26. [Google Scholar] [CrossRef]
- Moon, S.; Park, S.; Lee, J.H.; Lee, Y. Rapid Balise Telegram Decoder With Modified LFSR Architecture for Train Protection Systems. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 272–276. [Google Scholar] [CrossRef]
- Franco, D.; Aguado, M.; Pinedo, C.; Lopez, I.; Adin, I.; Mendizabal, J. A Contribution to Safe Railway Operation: Evaluating the Effect of Electromagnetic Disturbances on Balise-to-BTM Communication in Railway Control Signaling Systems. IEEE Veh. Technol. Mag. 2021, 16, 104–112. [Google Scholar] [CrossRef]
- Liu, J.; Cai, B.-G.; Wang, J.; Lu, D.-B. GNSS Jamming Detection and Exclusion for Trustworthy Virtual Balise Capture in Satellite-Based Train Control. IEEE Trans. Intell. Transp. Syst. 2022, 23, 23640–23656. [Google Scholar] [CrossRef]
- Gong, S.; Liu, Z.; Luo, L.; Zhou, G.; Wang, S. The optimization study of the on-board antenna of BTM based on electromagnetic model. In Proceedings of the 2013 IEEE International Conference on Intelligent Rail Transportation Proceedings, Beijing, China, 30 August–1 September 2013; pp. 37–41. [Google Scholar] [CrossRef]
- Test Specification for Eurobalise FFFIS SUBSET-085. 2012. Available online: https://www.era.europa.eu/system/files/2023-01/sos2_index043_-_subset-085_v300.pdf (accessed on 24 May 2023).
- Test Specification for Eurobalise FFFIS SUBSET-036. 2015. Available online: https://www.era.europa.eu/system/files/2023-01/sos3_index009_-_subset-036_v310.pdf (accessed on 24 May 2023).
- Dobrogowski, A.; Kasznia, M. Direct approach to MTIE calculation. In Proceedings of the 1999 Joint Meeting of the European Frequency and Time Forum and the IEEE International Frequency Control Symposium (Cat. No. 99CH36313), Besancon, France, 13–16 April 1999; Volume 2, pp. 1121–1124. [Google Scholar] [CrossRef]
- Dobrogowski, A.; Kasznia, M. Testing of the methods of real-time MTIE calculation. In Proceedings of the 2005 IEEE International Frequency Control Symposium and Exposition, Vancouver, BC, Canada, 29–31 August 2005; pp. 397–403. [Google Scholar] [CrossRef]
- Dobrogowski, A.; Kasznia, M. Some concepts of the real-time MTIE assessment for multi-channel time error measurement. In Proceedings of the 2012 IEEE International Frequency Control Symposium Proceedings, Baltimore, MD, USA, 21–24 May 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Raben, H.; Borg, J.; Johansson, J. Improved efficiency in the CMOS cross-connected bridge rectifier for RFID applications. In Proceedings of the 18th International Conference Mixed Design of Integrated Circuits and Systems—MIXDES 2011, Gliwice, Poland, 16–18 June 2011; pp. 334–339. [Google Scholar]
- Fu, Q.; Gay, N.; Bansleben, C.; Hildebr, R.; Heiss, M.; Turke, A.; Fischer, W.J. Optimization of the NMOS and PMOS gate cross-connected rectifier for RF power extraction in RFID applications. In Proceedings of the 2008 Asia-Pacific Microwave Conference, Hong Kong, China, 16–20 December 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Cha, H.K.; Park, W.T.; Je, M. A CMOS Rectifier With a Cross-Coupled Latched Comparator for Wireless Power Transfer in Biomedical Applications. IEEE Trans. Circuits Syst. II Express Briefs 2012, 59, 409–413. [Google Scholar] [CrossRef]
- Jianyun, H.; Yan, H.; Hao, M. High efficient rectifier circuit eliminating threshold voltage drop for RFID transponders. In Proceedings of the 2005 6th International Conference on ASIC, Shanghai, China, 24–27 October 2005; pp. 607–610. [Google Scholar] [CrossRef]
- Dhayabarasivam, S.S.; Jayanthi, K. Energy Harvesting Circuit Utilizing MOSFET Based Bridge Rectifier. In Proceedings of the 2018 IEEE International Conference on System, Computation, Automation and Networking (ICSCA), Pondicherry, India, 6–7 July 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Grajdeanu, A.-T.; Răducan, C.; Pleşa, C.S.; Neag, M.; Vărzaru, L.; Ţopa, M.D. Fast LDO Handles a Wide Range of Load Currents and Load Capacitors, up to 100 mA and Over 1 μF. IEEE Access 2022, 10, 9124–9141. [Google Scholar] [CrossRef]
- Liu, N.; Chen, D. A Transient-Enhanced Output-Capacitorless LDO With Fast Local Loop and Overshoot Detection. IEEE Trans. Circuits Syst. Regul. Pap. 2020, 67, 3422–3432. [Google Scholar] [CrossRef]
- Adorni, N.; Stanzione, S.; Boni, A. A 10-mA LDO With 16-nA IQ and Operating From 800-mV Supply. IEEE J. -Solid-State Circuits 2020, 55, 404–413. [Google Scholar] [CrossRef]
- Gupta, V.; Rincón-Mora, G.A.; Raha, P. Analysis and design of monolithic, high PSR, linear regulators for SoC applications. In Proceedings of the IEEE International SOC Conference, 2004 Proceedings, Santa Clara, CA, USA, 12–15 September 2004; pp. 311–315. [Google Scholar] [CrossRef]
- Heng, S.; Pham, C.-K. A Low-Power High-PSRR Low-Dropout Regulator With Bulk-Gate Controlled Circuit. IEEE Trans. Circuits Syst. II Express Briefs 2010, 57, 245–249. [Google Scholar] [CrossRef]
- El-Nozahi, M.; Amer, A.; Torres, J.; Entesari, K.; Sánchez-Sinencio, E. High PSR Low Drop-Out Regulator With Feed-Forward Ripple Cancellation Technique. IEEE J.-Solid-State Circuits 2010, 45, 565–577. [Google Scholar] [CrossRef]
- Patel, A.P.; Rincón-Mora, G.A. High Power-Supply-Rejection (PSR) Current-Mode Low-Dropout (LDO) Regulator. IEEE Trans. Circuits Syst. II Express Briefs 2010, 57, 868–873. [Google Scholar] [CrossRef]
- Duong, Q.H.; Nguyen, H.H.; Kong, J.W.; Shin, H.S.; Ko, Y.S.; Yu, H.Y.; Lee, Y.H.; Bea, C.H.; Park, H.J. Multiple-loop design technique for high-performance low dropout regulator. In Proceedings of the 2016 IEEE Asian Solid-State Circuits Conference (A-SSCC), Toyama, Japan, 7–9 November 2016; pp. 217–220. [Google Scholar] [CrossRef]
- Yu, J.; Zhao, Y.; Wang, Z.; Zhang, T. A curvature-compensated bandgap reference with high PSR. In Proceedings of the 2008 IEEE International Conference on Granular Computing, Hangzhou, China, 26–28 August 2008; pp. 752–755. [Google Scholar] [CrossRef]
- Li, W.; Yao, R.; Guo, L. A low power CMOS bandgap voltage reference with enhanced power supply rejection. In Proceedings of the 2009 IEEE 8th International Conference on ASIC, Changsha, China, 20–23 October 2009; pp. 300–304. [Google Scholar] [CrossRef]
- Sanborn, K.; Ma, D.; Ivanov, V. A Sub-1-V Low-Noise Bandgap Voltage Reference. IEEE J.-Solid-State Circuits 2007, 42, 2466–2481. [Google Scholar] [CrossRef]




















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Shan, Q.; Wei, Z.; Lin, Z.; Wu, F.; Xiao, J.; Huang, S.; Liu, Y. A 62 ppm MDR Deviation and Sub-250 ns MTIE Railway Balise. Electronics 2023, 12, 4217. https://doi.org/10.3390/electronics12204217
Li Z, Shan Q, Wei Z, Lin Z, Wu F, Xiao J, Huang S, Liu Y. A 62 ppm MDR Deviation and Sub-250 ns MTIE Railway Balise. Electronics. 2023; 12(20):4217. https://doi.org/10.3390/electronics12204217
Chicago/Turabian StyleLi, Zheng, Qiang Shan, Zihui Wei, Ziming Lin, Fangda Wu, Jinjin Xiao, Shuilong Huang, and Yu Liu. 2023. "A 62 ppm MDR Deviation and Sub-250 ns MTIE Railway Balise" Electronics 12, no. 20: 4217. https://doi.org/10.3390/electronics12204217