SEDC motors have many important characteristics, such as wide-range operation and continuous and accurate controlling, make it versatile and useful in many industrial applications. This motor is mostly used in traction systems, steel, and rolling mills where constant and smooth operation is required, such as those of electrical vehicles, electric cranes, and robotic operations. For performing any particular task, the motor operates in various modes of speed. So, the motor requires a controller that can control the motor’s speed as per the desired application [
1].
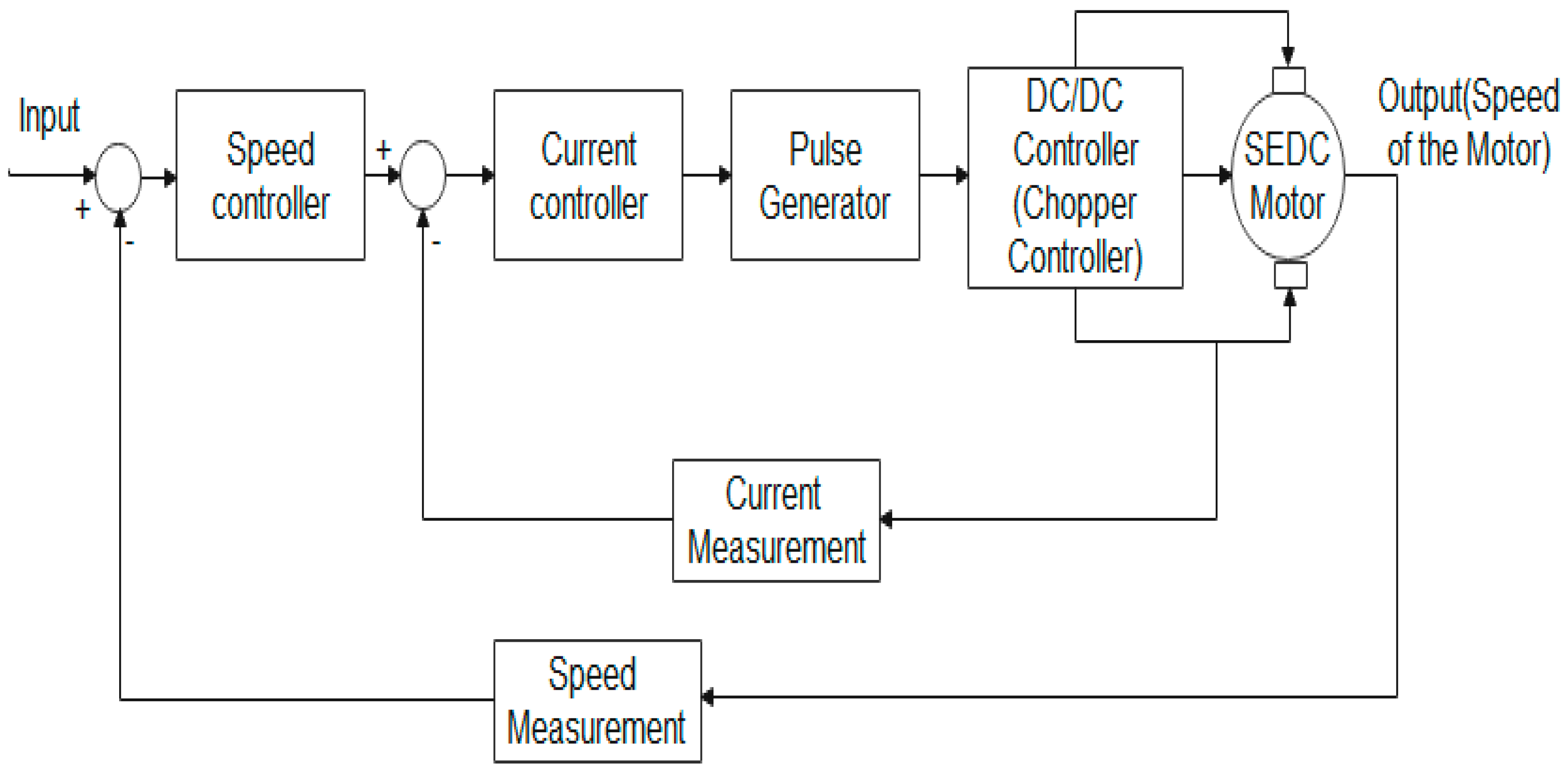
The controller’s application collects the signals from the process, determines how much speed is required, and operates the motor at the desired speed. Using a feedback system, the controller collects the information regarding the actual rotating speed at real-time operation and compares it with reference values. If the speed decreases from the required value, it takes action and increases up to the desired speed value of the motor [
2].
Classical controllers have been broadly suggested for the speed control of SEDCMs. The performance of these controllers mainly depends on the accuracy of a mathematical model of the motor for different industrial applications required to develop mathematical models subjected to variation in parameters. Article [
3] used chopper control, PI controller suggested [
4], phase locked loop method implemented in [
5], propose classical controlling method such as field weakening [
6], flyback converter [
7] and internal model control used by [
8].
When the motor is handling the nonlinear loads, the parameters such as friction and magnetic saturation of the load change continuously. Conventional controllers cannot maintain the motor’s constant speed. Now, these controllers are replaced by artificial intelligence-based controllers for more intelligent control of the speed of SEDCMs. Researchers proposed some new controlling algorithms which are more effective than classical controllers, such as the fuzzy controller, fuzzy PI controller, and NN-fuzzy controller [
9].
Digital controllers take action only when the input is “1”, which means it is in an “ON” state for the digital controller (when the input is zero, it means it is in an “OFF” state). The fuzzy controller cannot work as a digital controller with zero and one, but it can work between zero and one. For example, imagine that someone is checking the height of the students in a class and takes a standard value such as 6 feet as the threshold for tallness, meaning that any student above 6 feet is tall and any student below 6 feet is short. If using a digital controller, when the input is 6 feet or more, it would give the result “Tall or 1”, and when the input is below 6 feet, it would give the result “Short or 0”. However, we can see that practically any student who has a height of around 5.99 feet is also tall, but the digital controller considered him or her short.
In the fuzzy controller, they are not considered tall or short, but they are assigned a membership function that is nearest to the results. The fuzzy controller creates fuzzy membership between zero and one for presenting the concepts of partial truth. In the fuzzy controller, the tallest student receives a maximum membership of “1”, and the remaining student who has less height receives a decremented membership up to zero. It implements human thinking and experience for creating a control system. Fuzzy logic is considered to be like human thinking for practical work because the system does not consist of black and white but lies in grayness [
10].
The effectiveness of the fuzzy controller can be improved if the optimum value of the selected membership functions is used. PSO is the optimization technique to determine the optimum value of a linear or nonlinear set of data. This work used a fuzzy PSO controller to obtain the optimum speed control of an SEDC motor. This controller is also effective even if the load is changing. Simulation results were obtained by the fuzzy PSO controller compared with the results obtained by the PID controller. In the results section, a deep discussion is given.
Literature Review
The following paragraphs discuss the work conducted by various researchers on the speed control of DC motors. NARMA L2 suggested speed regulation of SEDCM which can handle the nonlinearity operation [
1]. A microcontroller used an eight-bit C505C-L for control of speed in both directions. Moreover, the proposed real-time controller approach is based on the closed-loop feedback error principle, unlike the existing open-loop designs [
2].
A class chopper is tasked with designing and implementing a speed controller to control the separately excited DC motor speed. The speed of the separately excited DC motor is controlled to a maximum of its rated speed using a chopper as a converter. The speed controller used is the PI controller, which reduces steady-state error and provides fast control [
3].
A fuzzy controller for the control of the shaft position of the DC motor is suggested in reference [
10]. They designed a fuzzy controller for ten fuzzy members and optimized it using a genetic algorithm. Article [
11] proposed a fuzzy controller and provided a digital signal using digital signal processing units to operate different modes of DC motors.
Article [
12] also proposed a fuzzy controller that helps tune PI controllers for the stable operation of DC motors. They also implemented a PLC control system to make the automatic operation of the controller. A new hybrid system called Neuro-Fuzzy was used in article [
9] for the smooth operation of a DC motor. A fuzzy based controller proposed for the control of operation of the servomotor [
13].
A self-tuned PID controller with a fuzzy logic controller is proposed by [
14], which has self-tuning parameters provided online for real-time control of the operation. Articles [
15,
16] proposed a fuzzy logic controller, which is also effective if the parameters’ value changes during the operation of the motor.
A PLL control system with inputs of IGBT for speed control of SEDC motors was suggested in article [
5]. PLL controllers are used for constant frequency control of the motor. The NN-fuzzy hybrid system has been suggested for speed control of a separately excited DC motor. This method tries to control the fractional part of PID parameters for fine control of motor operation [
17].
SEDC motors operated in a high-speed field-weakening regime controlled by using a nonlinear multiple-input multiple-output feedback linearization technique [
6]. The adaptive load approach used a sensor-less control system to impart the motor’s dynamic performance. Online tuning of PID controller parameters with the help of the recursive least square algorithm was suggested in articles [
18,
19,
20].
A DC-to-DC buck converter was suggested for DC motor control by [
21], and for a permanent magnet with a DC motor, the authors of [
22] suggested the predictive control algorithm with a Discrete-Time Reduced-Order GPIO.
For the selection of the optimum side for the charging stations, the authors of [
23] proposed an MCDA approach based on GIS. They suggested genetic optimization techniques for the selection of the optimum location of the charging stations.
For the analysis of indirect flat-panel evaporative coolers, the authors of [
24] proposed the mechanism and theory of operation based on X-analysis. Flat-plate heat exchanger entropy is calculated based on the second law of thermodynamics.
A pinch technique was proposed in article [
25] which optimizes the consumption of energy in the process of milk powder production. For the analysis of economic and technical aspects, the stream information data were optimized by an Aspen Energy Analyzer.
From the above discussion, it is clear that a separately excited DC motor is very useful for industrial and domestic work if its speed can be controlled at the desired value. When using classical controllers for the control of the SEDC motor, they face problems during the change in the load. If the load varies with time, motor speed controlling at a steady state is a very difficult task.
Classical controllers such as PI and PID can provide speed control, but they need continuous tuning of the control parameters, which is a very difficult task during the operation. The fuzzy controller is very versatile and used for speed control of the DC motor in industrial as well as domestic applications. However, fuzzy controllers also need to use the correct value of the membership; otherwise, we have to use the trial and hidden method and find out the correct value of membership. This work uses a novel PSO to find out the optimum value of the membership function according to the error that arises from the output of the motor. So, there is no need to use trial and hidden methods, and it can save our time and improve the control action of the fuzzy controller.





 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}