
High-Resistance Grounding Fault Detection and Line Selection in Resonant Grounding Distribution Network
Abstract
:1. Introduction
2. Principal for Transient Analysis of High Resistance Grounding Fault
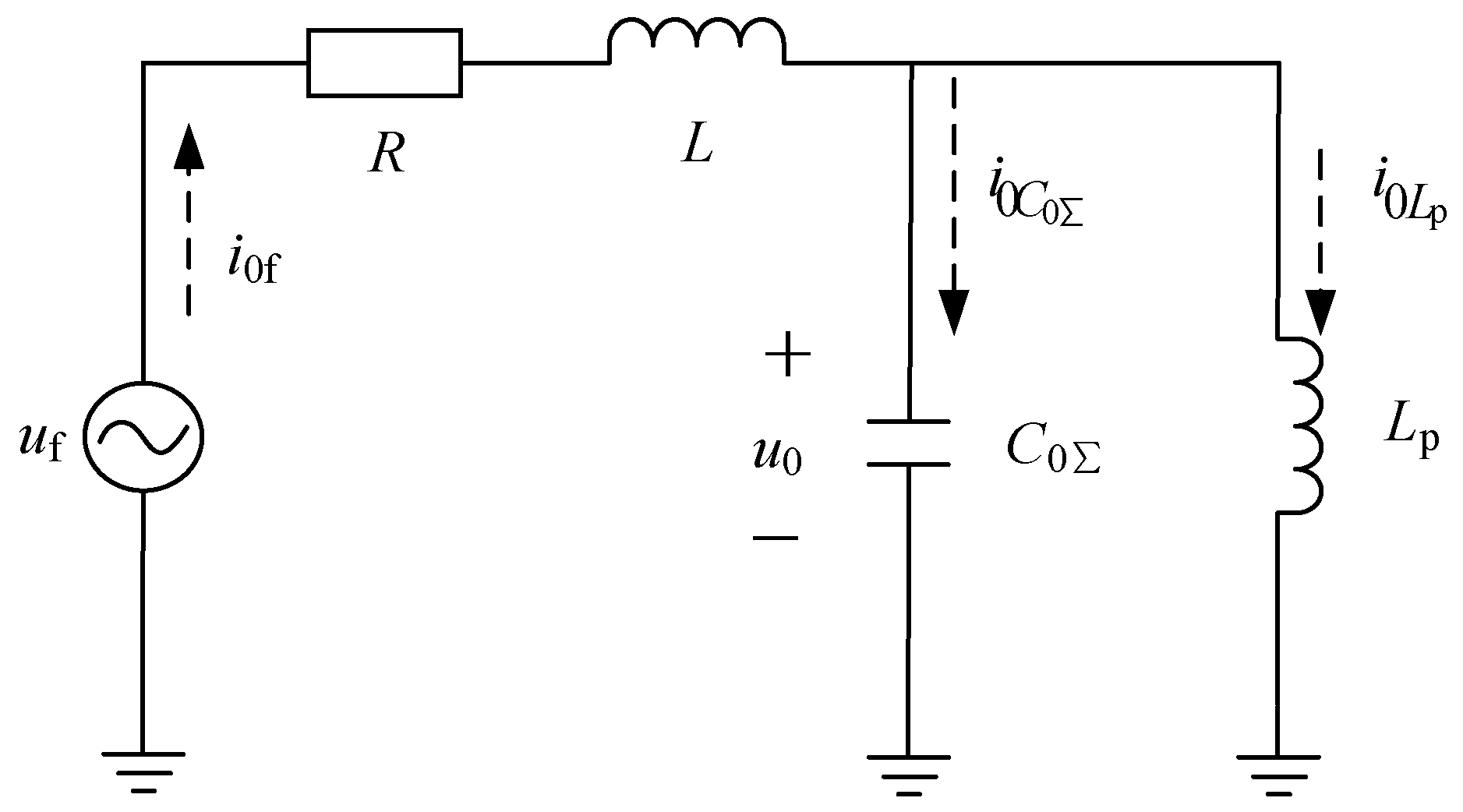
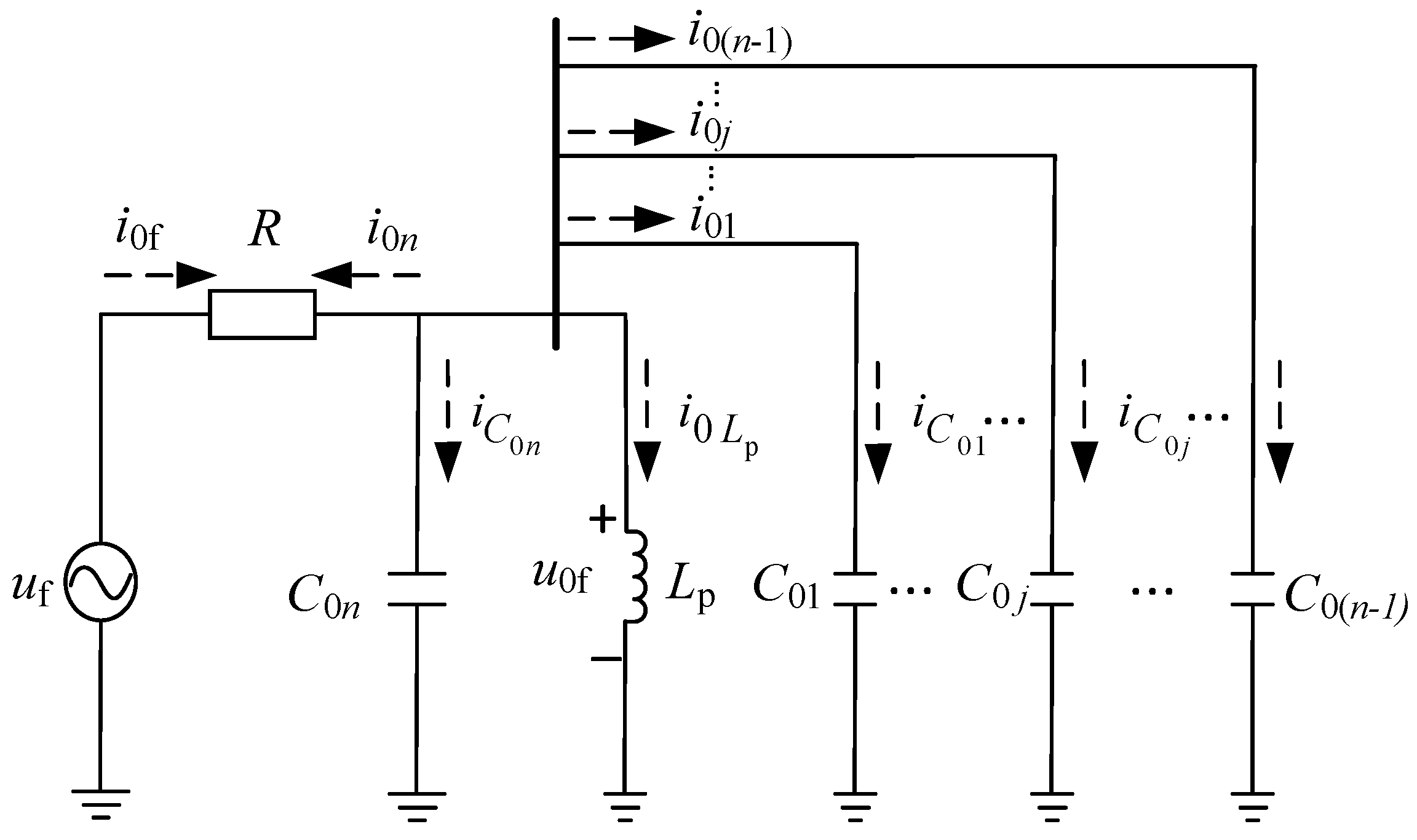
2.1. High-Resistance Grounding Fault Equivalent Circuit
2.2. Transient Calculation of Over-Damped State
2.3. Transient Calculation of Under-Damped State
2.4. Analysis of Zero-Sequence Impedance Characteristics of High-Resistance Grounding
2.4.1. The Zero-Sequence Impedance Characteristics of the Normal Feeder
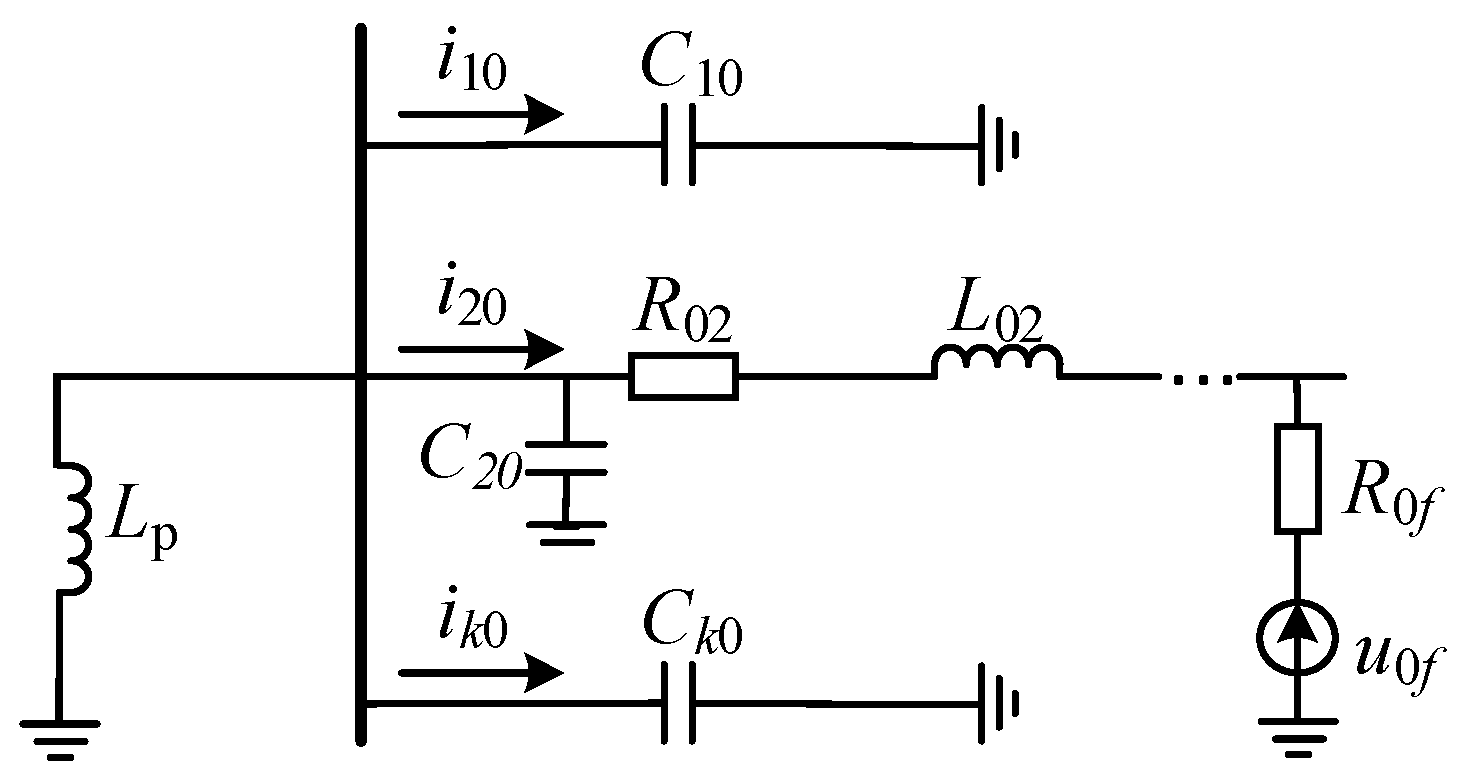
2.4.2. Zero-Sequence Impedance Characteristics of Faulty Feeder
3. Fault Detection Algorithm
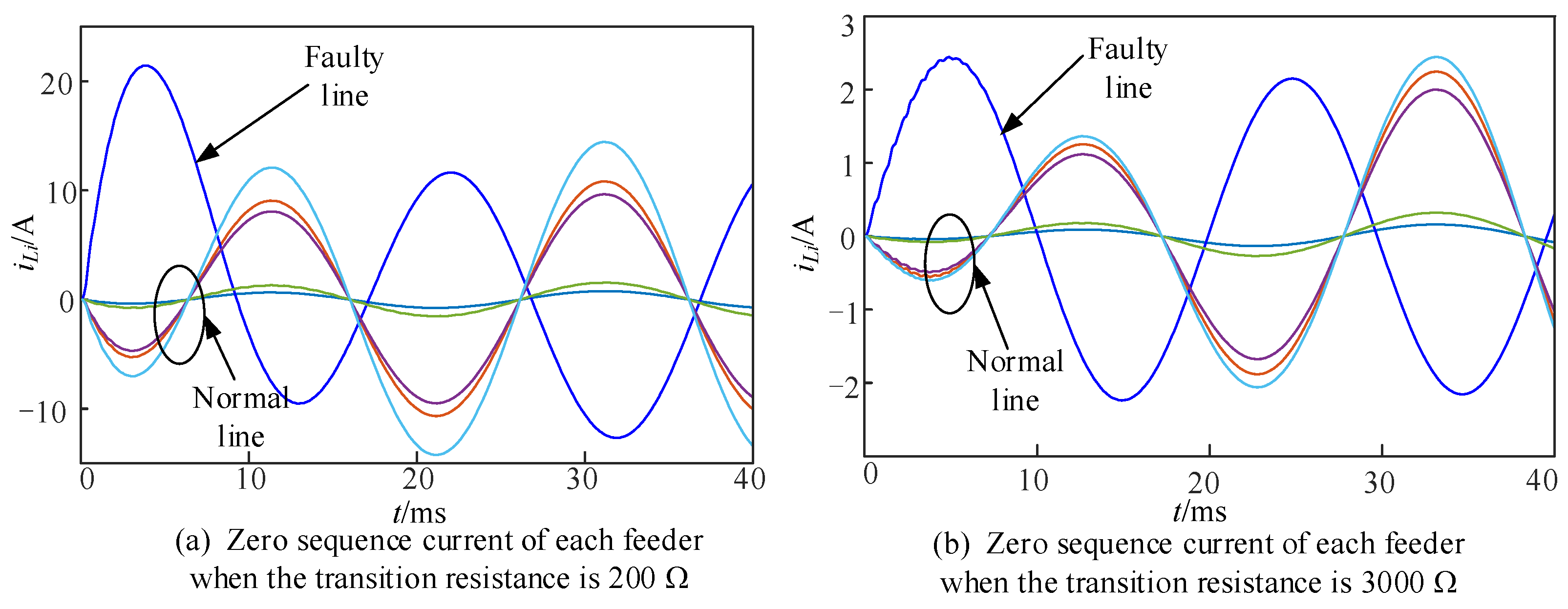
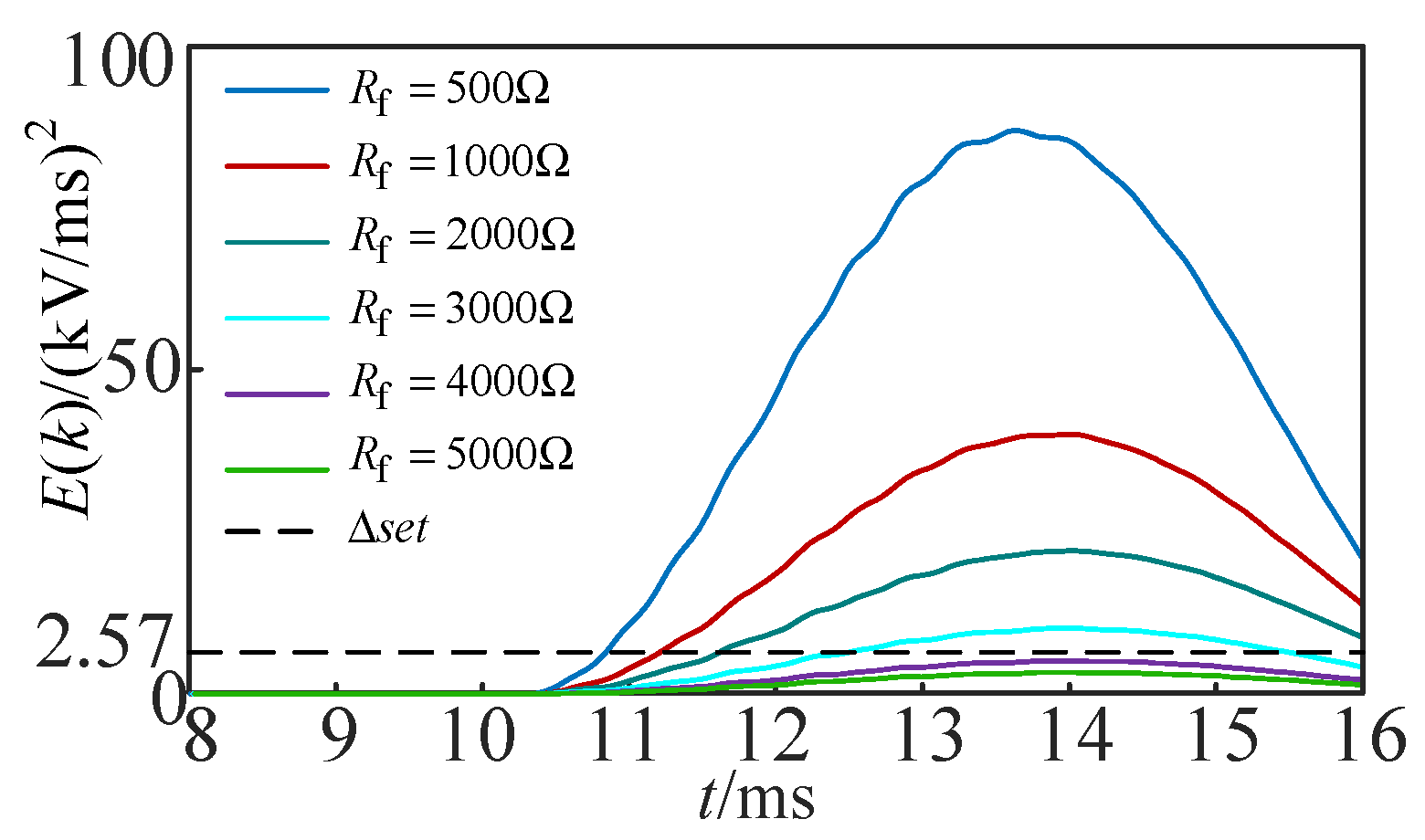
3.1. Comparison of Fault Signals under Different Transition Resistances
3.2. High-Resistance Ground Fault Detection Algorithm
4. Principle for Fault Line Selection
4.1. Correlation Coefficient of Impedance Characteristics of Normal Feeder
4.2. Correlation Coefficient of Impedance Characteristics of Faulty Feeder
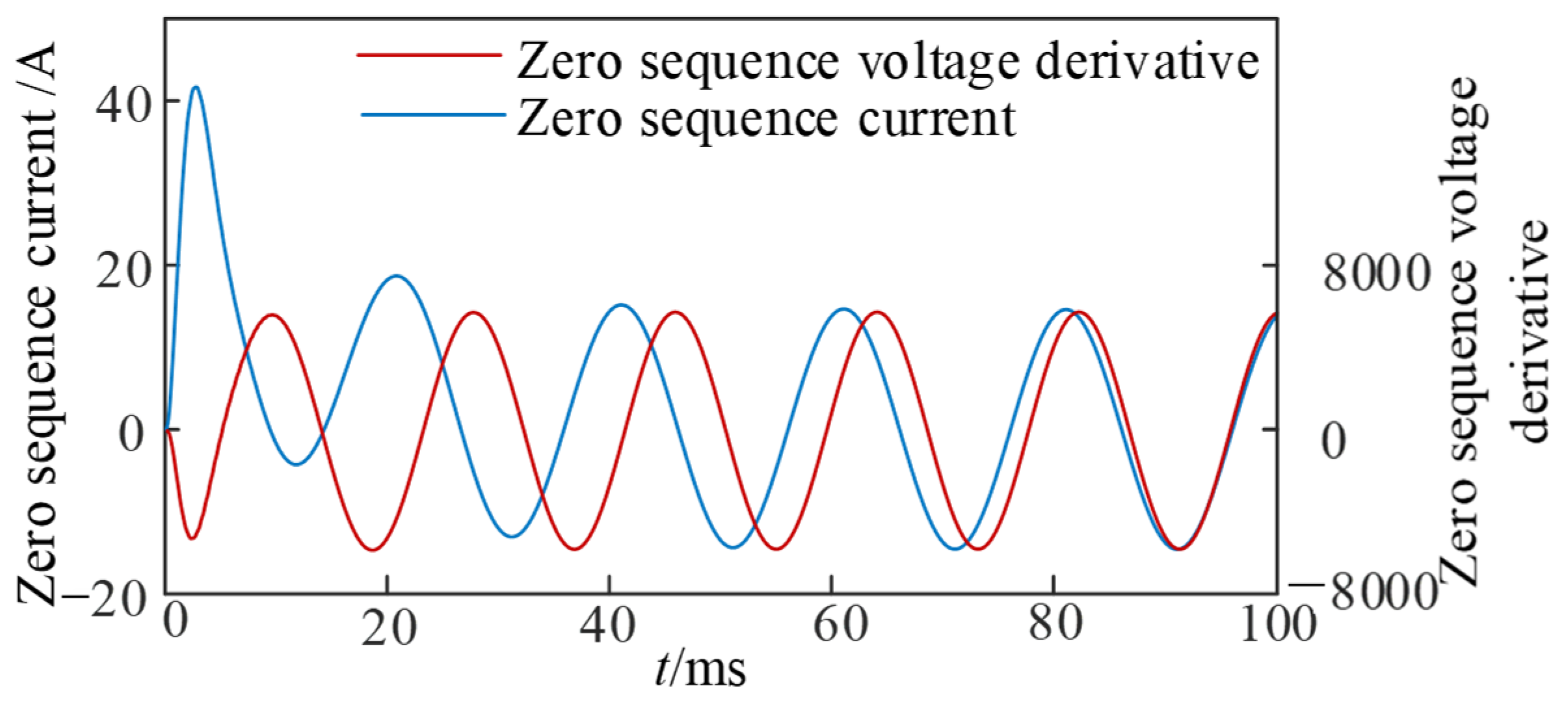
- The waveforms of the current and voltage derivatives at φ = 0° are shown in Figure 10. When the initial phase angle of the fault was one, the attenuation DC component reached the maximum. As shown in Figure 10, the zero-sequence voltage derivative and zero-sequence current waveform of the fault line bus were different in the first two power frequency bands.
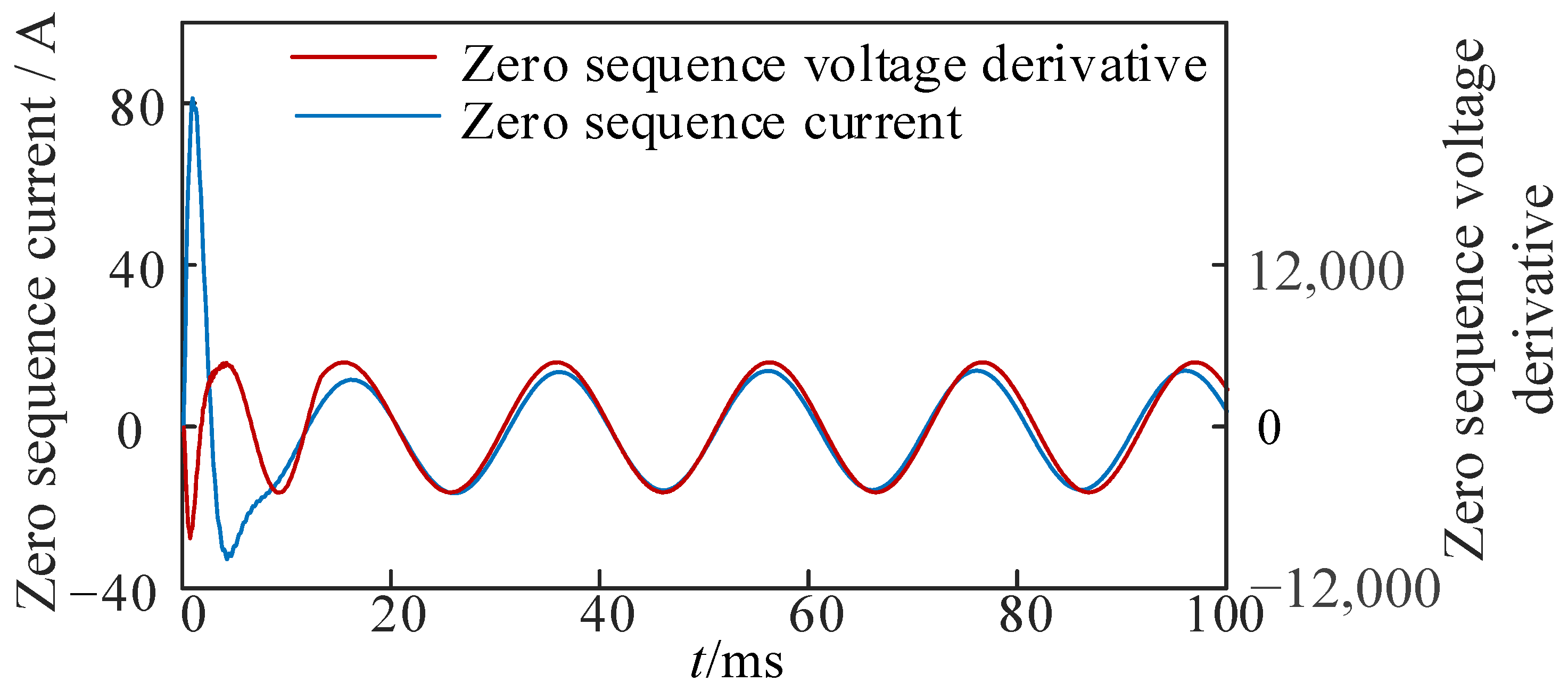
- The waveform of the current and voltage derivatives at φ = 90° are shown in Figure 11. In this case, the attenuation DC component was zero, and the current and voltage waveforms met only the first half-wave principle, as well as the derivatives of the zero-sequence current and bus zero-sequence voltage. Since there was no attenuation component, the polarity of the two waveforms rapidly became the same after the first half-wave.
4.3. Line Selection Criterion
4.4. Fault Line Selection Algorithm
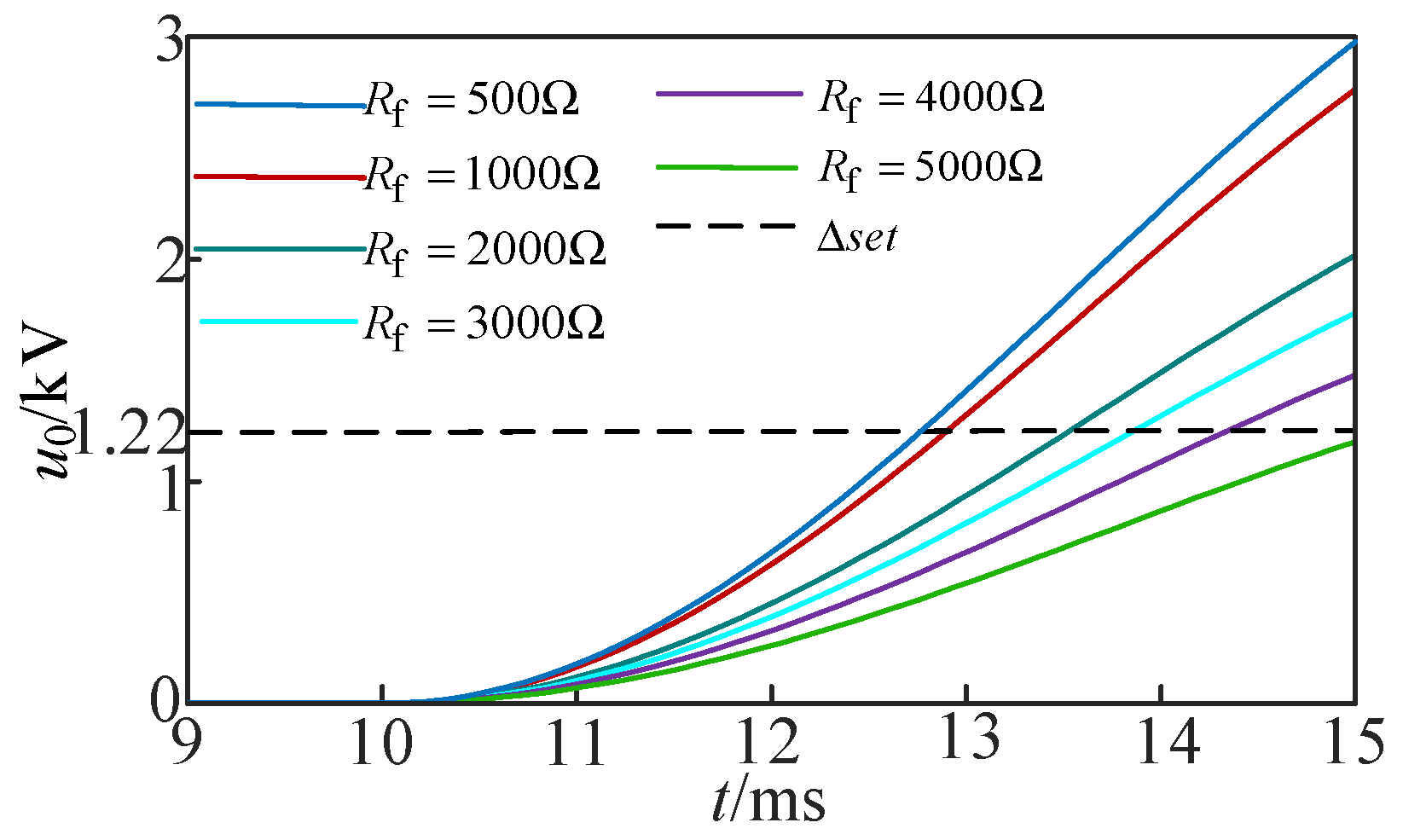
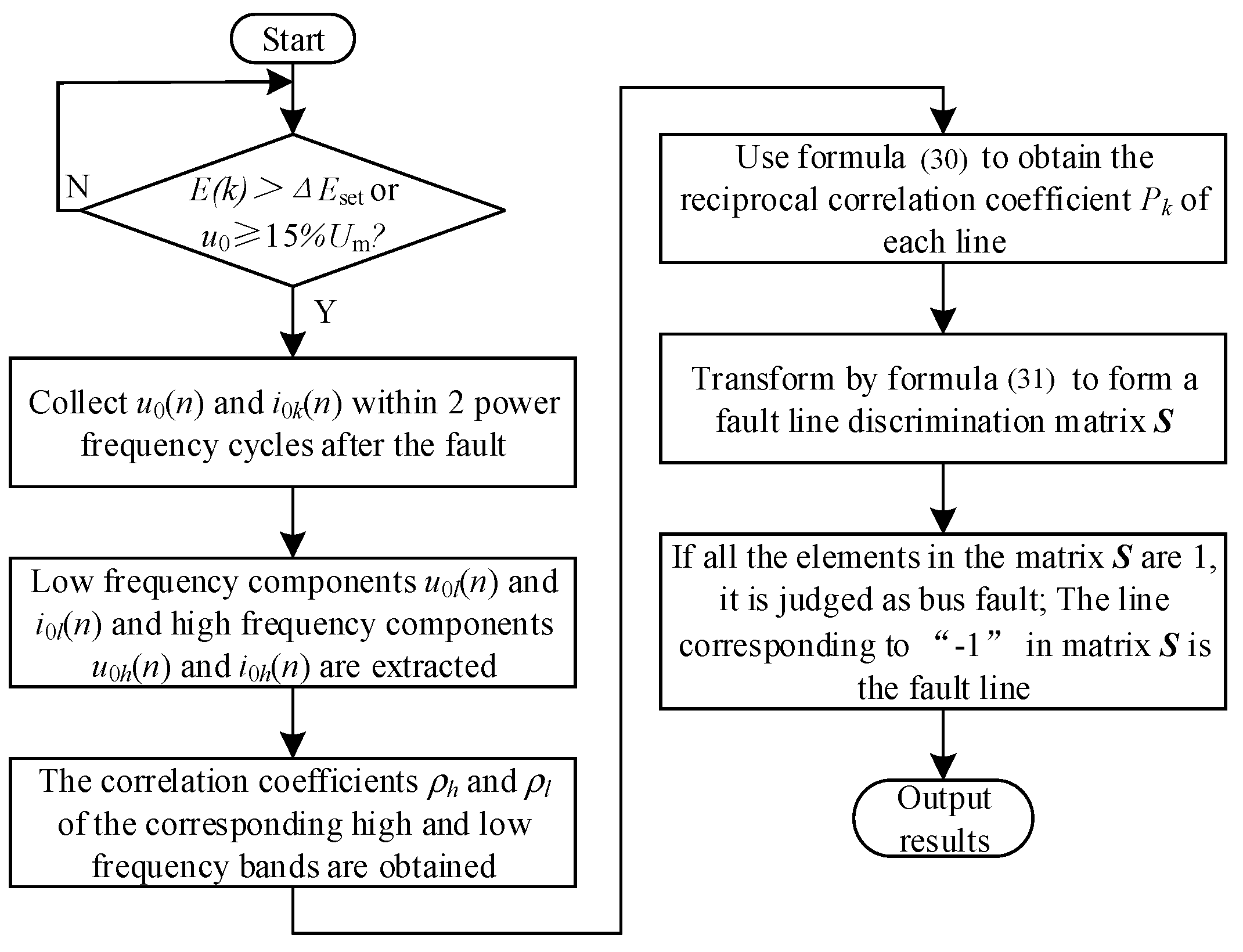
- According to the fault starting criterion, if E(k) > ΔEset or u0 ≥ 15%Um, the system is judged to have a fault, and the system collects the line’s zero-sequence current i0k(n) and the bus zero-sequence voltage u0(n) of two power frequency cycles.
- The low-frequency components u0l(n) and i0l(n) and high-frequency components u0h(n) and i0h(n) of the voltage and current are obtained through filtering.
- The data of the high- and low-frequency components of the voltage and current after the fault are extracted for the correlation analysis, and the correlation coefficients ρh and ρl corresponding to the high- and low-frequency bands, respectively, are obtained.
- The reciprocal correlation coefficient Pk of each line is calculated using Equation (30) and then transformed according to Equation (31) to obtain a fault line discrimination matrix , in which element “−1” indicates a faulty feeder and element “1” indicates a bus fault. The fault line selection process is shown in Figure 12.
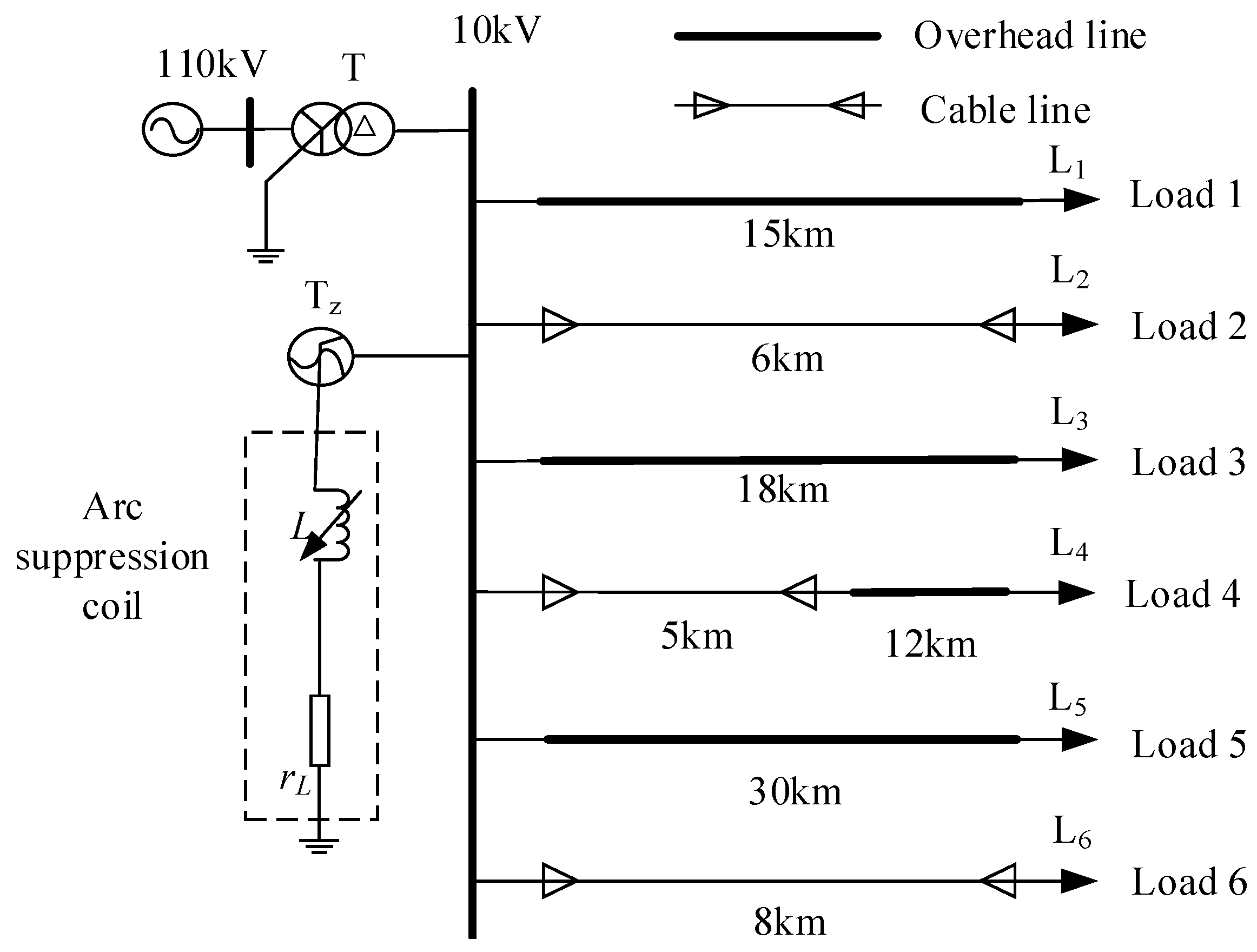
5. Simulation Verification
5.1. Line Selection Method Adaptability Analysis
5.1.1. Transition Resistance
5.1.2. Fault Closing Angle
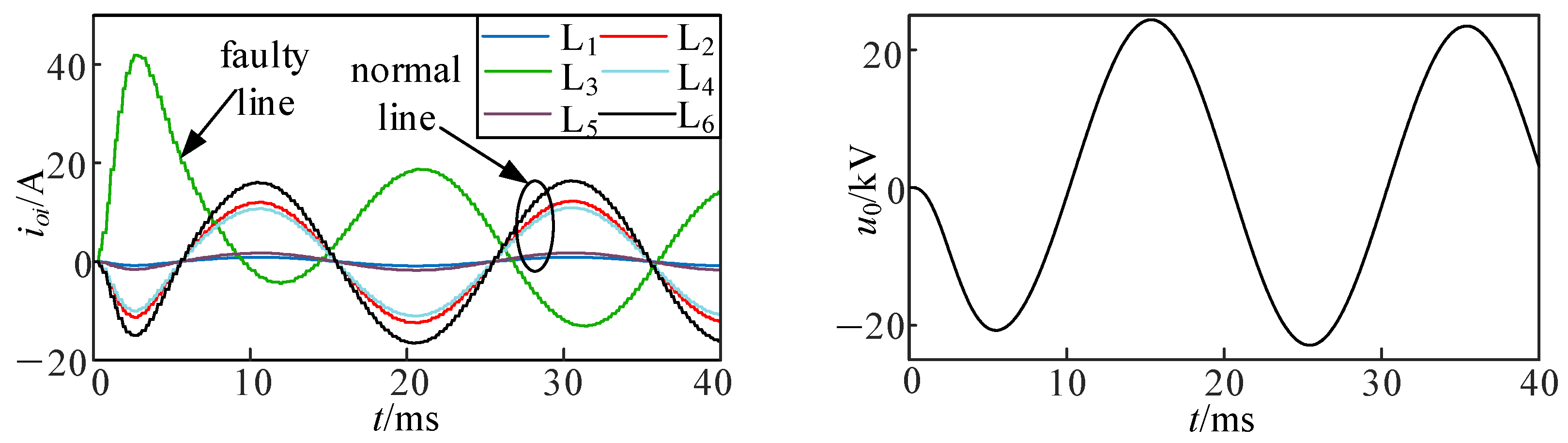
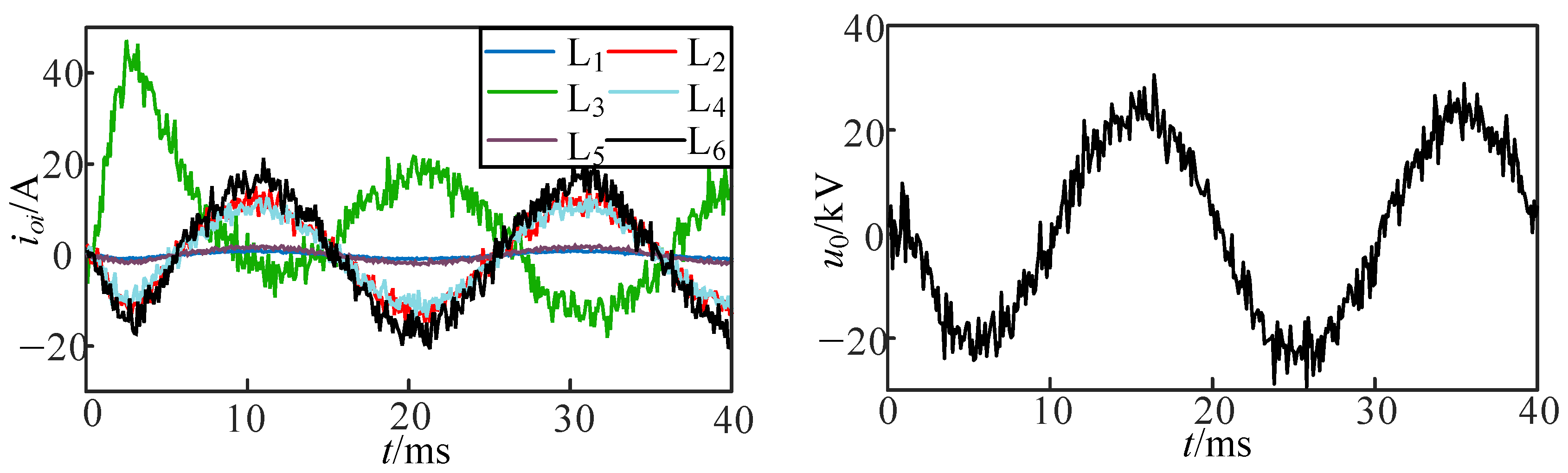
5.1.3. Noise Interference
6. Conclusions
- The fault detection algorithm is designed based on detecting sudden changes in the zero-sequence voltage. This algorithm effectively addresses issues such as incorrect operation of protection devices during high-resistance grounding faults, and failures of traditional fault detection algorithms when the initial phase angle of a fault is small and the transition resistance is large. As a result, the starting time of the line-selection device is shortened, and the overall sensitivity of the device is improved.
- The transient information of bus zero-sequence voltage and zero-sequence current on each line, analyzed in both high- and low-frequency bands, plays a crucial role in the selection of fault lines. This approach helps avoid problems such as missing fault information and low accuracy encountered when using only a single characteristic measure for selecting the fault line.
- The method being proposed offers prompt detection and response to HIG faults, eliminating the possibility of protection devices failing to operate. It also possesses extensive applicability. Moreover, it maximizes the utilization of fault information from each frequency band post-fault occurrence, enhances the fault characteristics, and accurately identifies the faulty line.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | |
| HIG | High-impedance grounding |
| LIG | Low-resistance grounding |
| RGDN | resonant grounding distribution network |
| SPG | Single phase to ground |
| Variables | |
| Um | Amplitude of the phase voltage |
| ω0 | Power angular frequency |
| θ | Initial fault phase angle |
| u0 | Bus zero-sequence voltage |
| R | Equivalent resistance |
| L | Equivalent inductance |
| Lp | equivalent zero-sequence inductance of the arc suppression coil |
| C0∑ | Sum of all three relative ground capacitances |
| i0C0∑ | Zero-sequence current of the system capacitance to the ground |
| i0Lp | Zero-sequence current of the arc suppression coil |
| Rf | Fault transition resistance |
| C0j | Zero-sequence capacitance distributed to the ground of a feeder j |
| u0f | Zero-sequence bus voltage |
| power frequency quantity | |
| Transient quantity | |
| i0f | Zero-sequence current flowing through the fault point |
| ZOC | Input impedance of a feeder |
| L0k | Zero-sequence inductance of the feeder k |
| C0k | Zero-order distributed capacitance |
| Y(f) | Zero-sequence equivalent admittance |
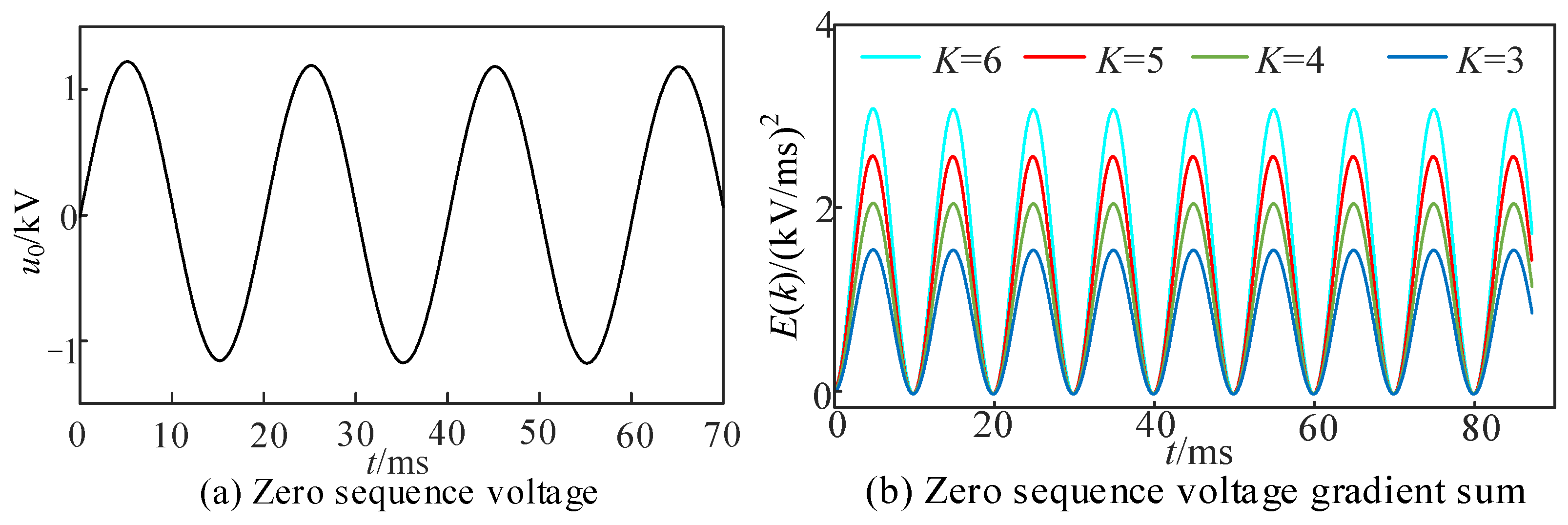
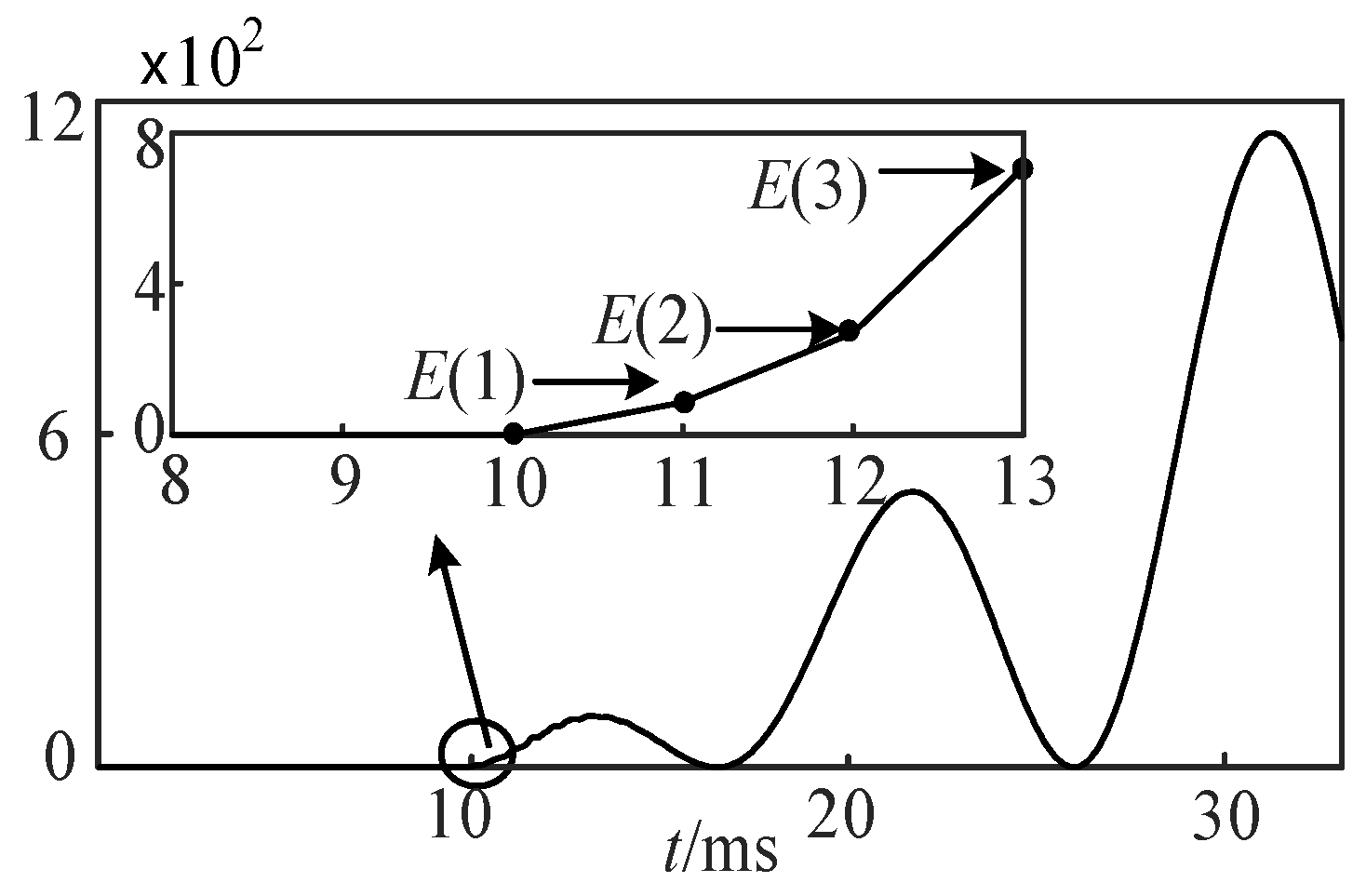
| cdif(k) | Sum of zero-sequence voltage gradient |
| E(k) | Sum of zero-order voltage gradient |
| ρ | correlation coefficient |
| Pk | reciprocal correlation coefficient |
References
- Ghaderi, A.; Ginn, H.L.; Mohammadpour, H.A. High impedance fault detection: A review. Electr. Power Syst. Res. 2017, 143, 376–388. [Google Scholar] [CrossRef]
- Gazzana, D.S.; Ferreira, G.; Bretas, A.S. An integrated technique for fault location and section identification in distribution systems. Electr. Power Syst. Res. 2014, 115, 65–73. [Google Scholar] [CrossRef]
- Sedighizadeh, M.; Rezazadeh, A.; Elkalashy, N.I. Approaches in high impedance fault detection—A chronological review. Adv. Electr. Comput. Eng. 2010, 10, 114–128. [Google Scholar] [CrossRef]
- Gautam, S.; Brahma, S.M. Detection of high impedance fault in power distribution systems using mathematical morphology. IEEE Trans. Power Syst. 2013, 28, 1226–1234. [Google Scholar] [CrossRef]
- Silva, L.; Pereira, R.; Abbad, J.R. Optimised placement of control and protective devices in electric distribution systems through reactive tabu search algorithm. Electr. Power Syst. Res. 2008, 78, 372–381. [Google Scholar] [CrossRef]
- Welfonder, T.; Leitloff, V.; Fenillet, R. Location strategies and evaluation of detection algorithms for earth faults in compensated MV distribution systems. IEEE Trans. Power Deliv. 2002, 15, 1121–1128. [Google Scholar] [CrossRef]
- Baqui, I.; Zamora, I.; Mazon, J. High impedance fault detection methodology using wavelet transform and artificial neural networks. Electr. Power Syst. Res. 2011, 81, 1325–1333. [Google Scholar] [CrossRef]
- Adamiak, M.; Wester, C.; Kulshrestha, A. High impedance fault detection on rural electric distribution systems. In Proceedings of the Rural Electric Power Conference, Orlando, FL, USA, 16–19 May 2010. [Google Scholar]
- Ma, J.; Liu, J.; Deng, Z. An adaptive directional current protection scheme for distribution network with DG integration based on fault steady-state component. Int. J. Electr. Power Energy Syst. 2018, 102, 223–234. [Google Scholar] [CrossRef]
- Sedighi, A.R.; Haghifam, M.R.; Malik, O.P. Soft computing applications in high impedance fault detection in distribution systems. Electr. Power Syst. Res. 2005, 76, 136–144. [Google Scholar] [CrossRef]
- Han, L.; Liu, S.; Chen, H. A new method of fault line selection for resonant grounding system based on improved S transform parameters. In Proceedings of the 2019 IEEE Sustainable Power and Energy Conference (iSPEC), Beijing, China, 21–23 November 2019. [Google Scholar]
- Song, X.; Gao, F.; Chen, Z. A negative selection algorithm based identification framework for distribution network faults with high resistance. IEEE Access 2019, 7, 109363–109374. [Google Scholar] [CrossRef]
- Li, Y.; Meng, X.; Song, X. Single-phase-to-ground fault line detection for distribution network based on optimal finite impulse response filter and hierarchical clustering. Power Syst. Tech. 2015, 39, 143–149. [Google Scholar]
- Shu, H.; An, N.; Yang, B. Single pole-to-ground fault analysis of MMC-HVDC transmission lines based on capacitive fuzzy identification algorithm. Energies 2020, 13, 319. [Google Scholar] [CrossRef]
- Haghifam, M.R.; Sedighi, A.R.; Malik, O.P. Development of a fuzzy inference system based on genetic algorithm for high-impedance fault detection. IEE Power Gener. Transm. 2006, 153, 359–367. [Google Scholar] [CrossRef]
- Jamali, S.; Bahmanyar, A. A new fault location method for distribution networks using sparse measurements. Int. J. Electr. Power Energy Syst. 2016, 81, 459–468. [Google Scholar] [CrossRef]
- Wang, X.; Gao, J.; Wei, X. A novel fault line selection method based on improved oscillator system of power distribution network. Math. Probl. Eng. 2014, 10, 901810. [Google Scholar] [CrossRef]
- Dong, X.; Shi, S. Identifying single-phase-to-ground fault feeder in neutral noneffectively grounded distribution system using wavelet transform. Electr. Power Sci. Eng. 2011, 23, 1829–1837. [Google Scholar]
- Bakar, A.; Ali, M.S.; Tan, C.K. High impedance fault location in 11 kV underground distribution systems using wavelet transforms. Int. J. Electr. Power Energy Syst. 2014, 55, 723–730. [Google Scholar] [CrossRef]
- Liu, M.; Fang, T.; Jiang, Y. A new correlation analysis approach to fault line selection based on transient main-frequency components. Power Syst. Prot. Control 2016, 44, 74–79. [Google Scholar]
- Long, Y.; Ouyang, J.; Xiong, X. Single phase high resistance grounding protection of distribution network based on zero sequence power variation. Trans. China Electrotech. Soc. 2019, 34, 3687–3695. [Google Scholar]
- Gao, F.; Zeng, L.; Li, Z. A new method for fault section identification in distribution networks combining distributed intelligent collaboration and cloud computing. Power Syst. Technol. 2021, 45, 2969–2978. [Google Scholar]
- Shao, W.; Liu, Y.; Cheng, Y. High-resistance fault section identification method for resonant grounding systems based on zero-sequence impedance mutation characteristics. Electr. Power Autom. Equip. 2021, 41, 120–126. [Google Scholar]
- Wang, B.; Cui, X.; Dong, X. Overview of arc high-resistance fault detection technology in distribution lines. Proc. Chin. Soc. Electr. Eng. 2020, 40, 96–107+377. [Google Scholar]
- Wei, M.; Shi, F.; Zhang, H. High-resistance fault section identification and zone locating method for resonant grounding systems based on synchronous zero-sequence current harmonic group ratio phase. Proc. Chin. Soc. Electr. Eng. 2021, 41, 8358–8372. [Google Scholar]
- Wang, X.; Gao, J.; Wei, X.; Guo, L.; Song, G.; Wang, P. Faulty feeder detection under high impedance faults for resonant grounding distribution systems. IEEE Trans. Smart Grid 2023, 14, 1880–1895. [Google Scholar] [CrossRef]
- Xiao, Q.; Guo, M.; Chen, D. High-impedance fault detection method based on one-dimensional variational prototyping-encoder for distribution networks. IEEE Syst. J. 2022, 16, 966–976. [Google Scholar] [CrossRef]
- Wang, B.; Cui, X. Nonlinear modeling analysis and arc high-impedance faults detection in active distribution networks with neutral grounding via Petersen coil. IEEE Trans. Smart Grid 2022, 13, 1888–1898. [Google Scholar] [CrossRef]
- Wang, B.; Geng, J.; Dong, X. High-impedance fault detection based on nonlinear voltage–current characteristic profile identification. IEEE Trans. Smart Grid 2018, 9, 3783–3791. [Google Scholar] [CrossRef]
- Huang, S.; Hsieh, C. High-impedance fault detection utilizing a Morlet wavelet transform approach. IEEE Trans. Power Deliv. 1999, 14, 1401–1410. [Google Scholar] [CrossRef]
- Gao, J.; Wang, X.; Wang, X.; Yang, A.; Yuan, H.; Wei, X. A high-impedance fault detection method for distribution systems based on empirical wavelet transform and differential faulty energy. IEEE Trans. Smart Grid 2022, 13, 900–912. [Google Scholar] [CrossRef]
- Tang, T.; Huang, C.; Jiang, Y. Fault line selection method in resonant earthed system based on transient signal correlation analysis under high and low frequencies. Power Syst. Autom. 2016, 40, 105–111. [Google Scholar] [CrossRef]
- Grajales, E.; Mora, F.; Perez, L. Advanced fault location strategy for modern power distribution systems based on phase and sequence components and the minimum fault reactance concept. Electr. Power Syst. Res. 2016, 140, 933–941. [Google Scholar] [CrossRef]
- Xue, Y.; Li, J.; Chen, X. Faulty feeder selection and transition resistance identification of high impedance fault in a resonant grounding system using transient signals. Proc. CSEE 2017, 37, 5037–5048+5223. [Google Scholar]
- Russell, B.; Benner, C. Arcing fault detection for distribution feeders: Security assessment in long term field trials. IEEE Trans. Power Deliv. 1995, 10, 676–683. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; Lawrence Erlbaum Associates: Hillsdale, NJ, USA, 1988. [Google Scholar]
- Li, S.; Gao, G.; Hu, G.; Gao, B.; Gao, T.; Wei, W.; Wu, G. Aging feature extraction of oil-impregnated insulating paper using image texture analysis. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 1636–1645. [Google Scholar] [CrossRef]
- Xue, Y.; Li, J.; Xu, B. Transient equivalent circuit and transient analysis of single-phase earth fault in arc suppression coil grounded system. Proc. CSEE 2015, 35, 5703–5714. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Starting System | 15%Um | Zero-Sequence Voltage Gradient Sum | ||||
|---|---|---|---|---|---|---|
| Rf/Ω | K = 3 | K = 4 | K = 5 | K = 6 | ||
| Start time (ms) | 500 | 12.8 | 10.7 | 10.8 | 10.8 | 10.9 |
| 1000 | 12.9 | 10.9 | 11.0 | 11.1 | 11.2 | |
| 2000 | 13.5 | 11.3 | 11.4 | 11.4 | 11.5 | |
| 3000 | 13.9 | 12.0 | 12.1 | 12.1 | 12.2 | |
| Interval time (ms) | 500 | 2.8 | 0.7 | 0.8 | 0.8 | 0.9 |
| 1000 | 2.9 | 0.9 | 1.0 | 1.1 | 1.2 | |
| 2000 | 3.5 | 1.3 | 1.4 | 1.4 | 1.5 | |
| 3000 | 3.9 | 2.0 | 2.1 | 2.1 | 2.2 | |
| Line Type | R1/(Ω·km−1) | L1/(mH·km−1) | C1/(μF·km−1) |
|---|---|---|---|
| Overhead line | 0.17 | 1.2100 | 0.00969 |
| Cable line | 0.27 | 0.2548 | 0.33910 |
| Line type | R0/(Ω·km−1) | L0/(mH·km−1) | C0/(μF·km−1) |
| Overhead line | 0.23 | 5.4780 | 0.0800 |
| Cable line | 2.70 | 1.0191 | 0.28000 |
| Rf/Ω | Inversion Correlation Coefficient Pk/P1, P2, P3, P4, P5, P6 | Fault Line Discrimination Matrix s | Line Selection Result |
|---|---|---|---|
| 200 | 3.6654, −0.0214, −0.0175, −0.0231, −0.0109, −0.0198 | s = [−1 1 1 1 1 1] | Correct |
| 500 | 3.8374, −0.0213, −0.0212, 0.0235, −0.0330, −0.0250 | s = [−1 1 1 1 1 1] | Correct |
| 700 | 3.4823, 0.0066, −0.0113, −0.0181, −0.0065, −0.0201 | s = [−1 1 1 1 1 1] | Correct |
| 1000 | 3.3891, −0.0227, −0.0355, −0.0247, 0.0032, −0.0402 | s = [−1 1 1 1 1 1] | Correct |
| 1500 | 3.3070, −0.0247, −0.0283, −0.0306, −0.0213,−0.0286 | s = [−1 1 1 1 1 1] | Correct |
| 2000 | 3.2201, −0.0173, −0.0381, −0.0302, 0.0047, −0.0221 | s = [−1 1 1 1 1 1] | Correct |
| 3000 | 3.0504, −0.0287, −0.0293, −0.0178, −0.0145, −0.0198 | s = [−1 1 1 1 1 1] | Correct |
| φ/(°) | Fault Phase Separation | Inversion Correlation Coefficient Pk/P1, P2, P3, P4, P5, P6 | Fault Line Discrimination Matrix s | Line Selection Result |
|---|---|---|---|---|
| 0 | Phase A | 9.2850, −0.0277, −0.0116, 0.0077, −0.0144, −0.0115 | s = [−1 1 1 1 1 1] | Correct |
| 15 | Phase B | 3.5714, 0.0027, −0.0219, −0.0130, −0.5146, −0.0073 | s = [−1 1 1 1 1 1] | Correct |
| 30 | Phase A | 3.5006, −0.0211, −0.0139, −0.0043, −0.0103, −0.0415 | s = [−1 1 1 1 1 1] | Correct |
| 45 | Phase A | 3.3607, −0.0058, −0.0180, −0.0153, −0.0158, −0.0096 | s = [−1 1 1 1 1 1] | Correct |
| 75 | Phase B | 3.1436, −0.0433, −0.0253, −0.0210, 0.0042, −0.0244 | s = [−1 1 1 1 1 1] | Correct |
| 90 | Phase A | 2.2661, −0.0130, −0.5146, −0.0439, −0.0243, −0.0247 | s = [−1 1 1 1 1 1] | Correct |
| Faulty Line | Fault Condition | Signal to Noise Ratio/dB | Inversion Correlation Coefficient Pk/P1, P2, P3, P4, P5, P6 | Fault Line Discrimination Matrix s | Line Selection Result | ||
|---|---|---|---|---|---|---|---|
| Rf/Ω | φ/(°) | Df/km | |||||
| L1 | 500 | 0 | 10 | 0 | 9.8028, −0.0054, −0.0140 −0.0117, −0.0052, −0.0268 | s = [−1 1 1 1 1 1] | Correct |
| L2 | 1000 | 60 | 5 | 30 | −0.0226, 3.2850, −0.0220 −0.0104, 0.0241, −0.0198 | s = [1 −1 1 1 1 1] | Correct |
| L3 | 1500 | 90 | 12 | 0 | −0.0174, −0.0215, 2.5421 0.0103, −0.0163, 0.0210 | s = [1 1 −1 1 1 1] | Correct |
| L4 | 2000 | 0 | 4 | 30 | −0.3613, −0.0177, −0.0170 5.4078, −0.0242, −0.0165 | s = [1 1 1 −1 1 1] | Correct |
| L5 | 2500 | 90 | 10 | 0 | −0.0354, −0.0112, −0.0436, −0.0379, 4.0254, −0.0093, | s = [1 1 1 1 −1 1] | Correct |
| L6 | 3000 | 0 | 4 | 30 | −0.0112, −0.0179, −0.0284, −0.0077, −0.0169, 4.0271, | s = [1 1 1 1 1 −1] | Correct |
| Bus bar | 500 | 60 | - | 0 | −0.0023, −0.0047, −0.0140 −0.0302, −0.0346, −0.0178 | s = [−1 1 1 1 1 1] | Correct |
| Bus bar | 3000 | 90 | - | 30 | −0.0145, 0.0075, −0.0058 −0.0031, −0.0126, −0.0091 | s = [−1 1 1 1 1 1] | Correct |
| Rf/Ω | The Projection Values on the PC1 Axis | Results from Reference [22] | The Method Proposed in This Paper |
|---|---|---|---|
| 50 | (−0.6360, 0.1257, 0.1260, 0.1260, 0.1255, 0.1260) | Correct | Correct |
| 100 | (−0.5251, 0.1265, 0.1265, 0.1263, 0.1260, 0.1265) | Correct | Correct |
| 300 | (−0.6299, 0.1213, 0.1210, 0.1215, 0.1215, 0.1214) | Correct | Correct |
| 500 | (−0.6127, 0.1065, 0.1066, 0.1065, 0.1066, 0.1065) | Correct | Correct |
| 800 | (−0.6062, 0.1200, 0.1389, 0.1301, 0.1254, 0.1263) | Incorrect | Correct |
| 1000 | (−0.5983, 0.1176, 0.1209, 0.1187, 0.1236,0.1241) | Incorrect | Correct |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, D.; Lu, B.; Lu, H. High-Resistance Grounding Fault Detection and Line Selection in Resonant Grounding Distribution Network. Electronics 2023, 12, 4066. https://doi.org/10.3390/electronics12194066
Yang D, Lu B, Lu H. High-Resistance Grounding Fault Detection and Line Selection in Resonant Grounding Distribution Network. Electronics. 2023; 12(19):4066. https://doi.org/10.3390/electronics12194066
Chicago/Turabian StyleYang, Dong, Baopeng Lu, and Huaiwei Lu. 2023. "High-Resistance Grounding Fault Detection and Line Selection in Resonant Grounding Distribution Network" Electronics 12, no. 19: 4066. https://doi.org/10.3390/electronics12194066