
Few-Shot Object Detection with Local Feature Enhancement and Feature Interrelation


Abstract
:1. Introduction
- The local feature enhancement module (LFEM), which can deeply extract the local feature representations on query and support images, is proposed.
- The intrinsic feature transform module (IFTM) is proposed, which transforms the feature extracted by LFEM and enriches the features information of novel classes.
- The Global Cross-Attention Network (GCAN) is proposed by integrating the global and spatial attention mechanisms. We build a balance between the interaction of global and local features and provide high-quality aggregation features for the detector.
- The aforementioned modules are put together in the Faster RCNN to create an exceptional FSOD network, which achieves excellent performance on the PASCAL VOC dataset.
2. Related Works
2.1. Object Detection
2.2. Few-Shot Learning
2.3. Few-Shot Object Detection
3. Method
3.1. Preliminaries
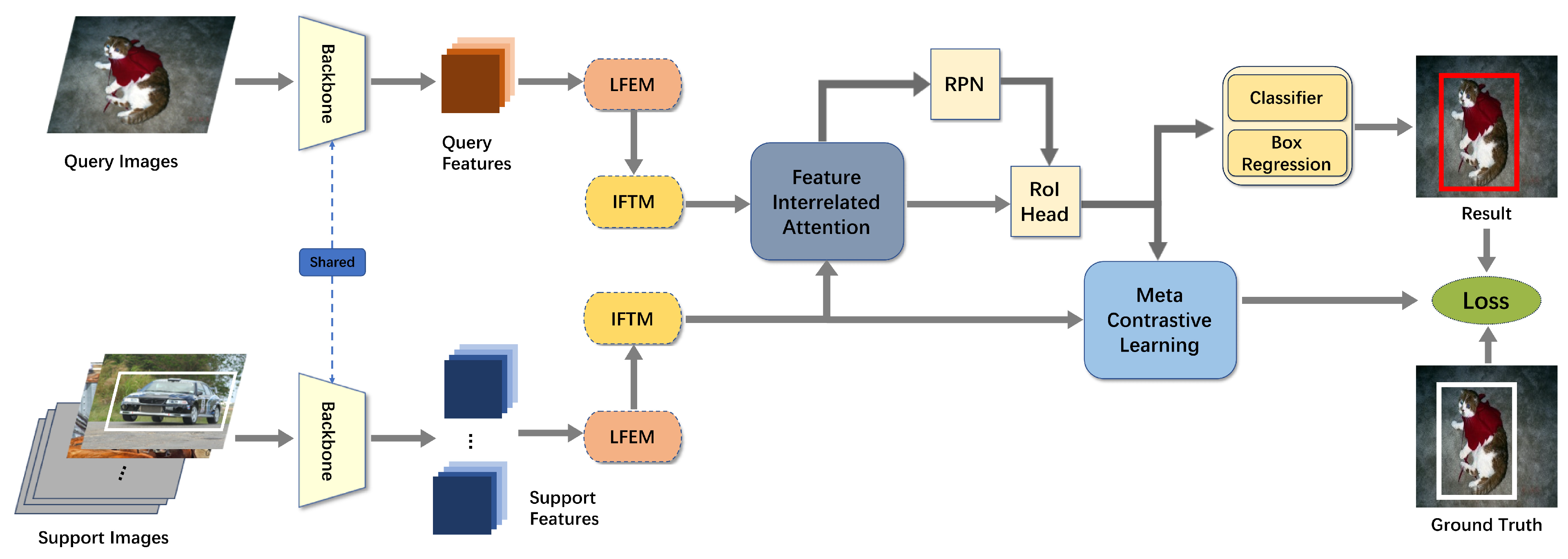
3.2. Network Overview
3.3. Local Feature Enhancement Module
3.4. Intrinsic Feature Transform Module
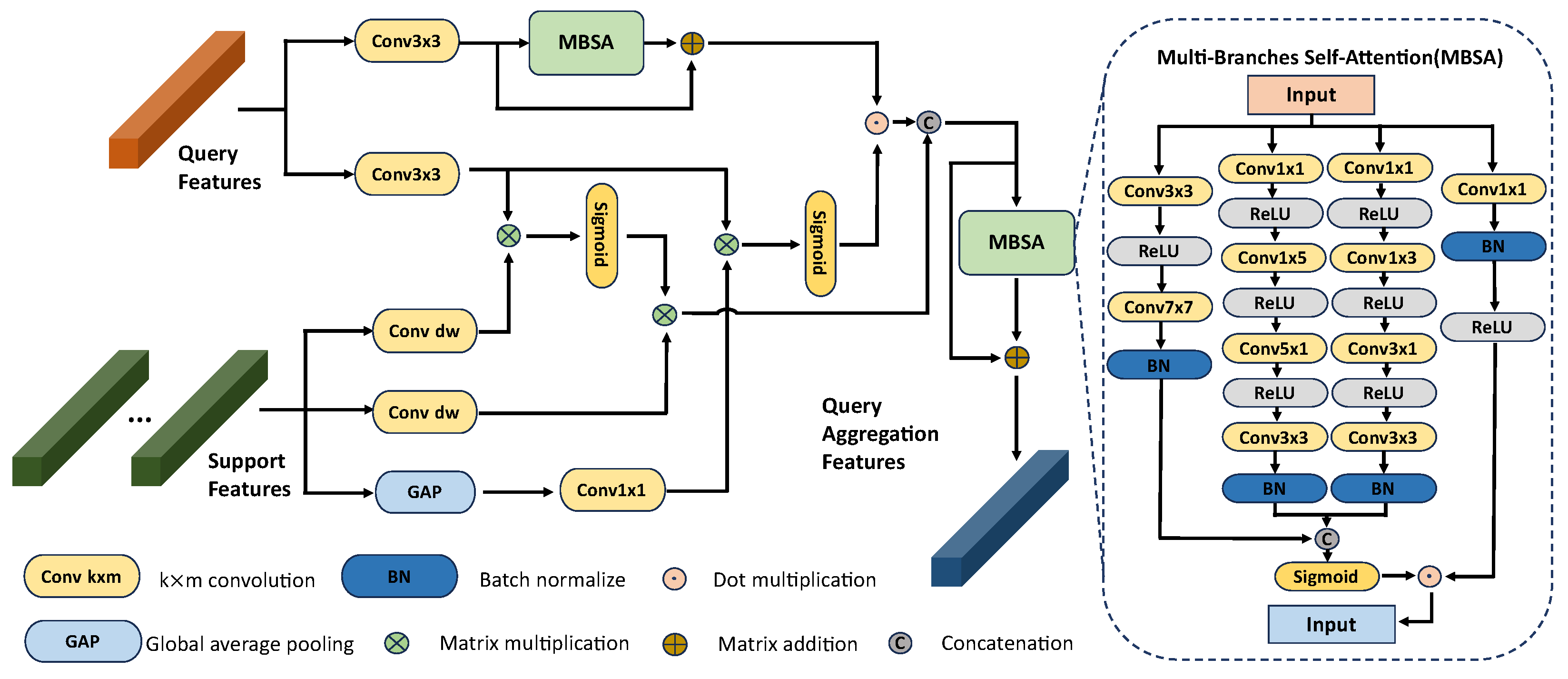
3.5. Global Cross-Attention Network
3.6. Meta-Contrastive Learning
3.7. Total Loss Function
4. Experiments
4.1. Dataset
4.2. Implementation Details
4.3. Comparison with Baselines
4.4. Qualitative Results and Analysis
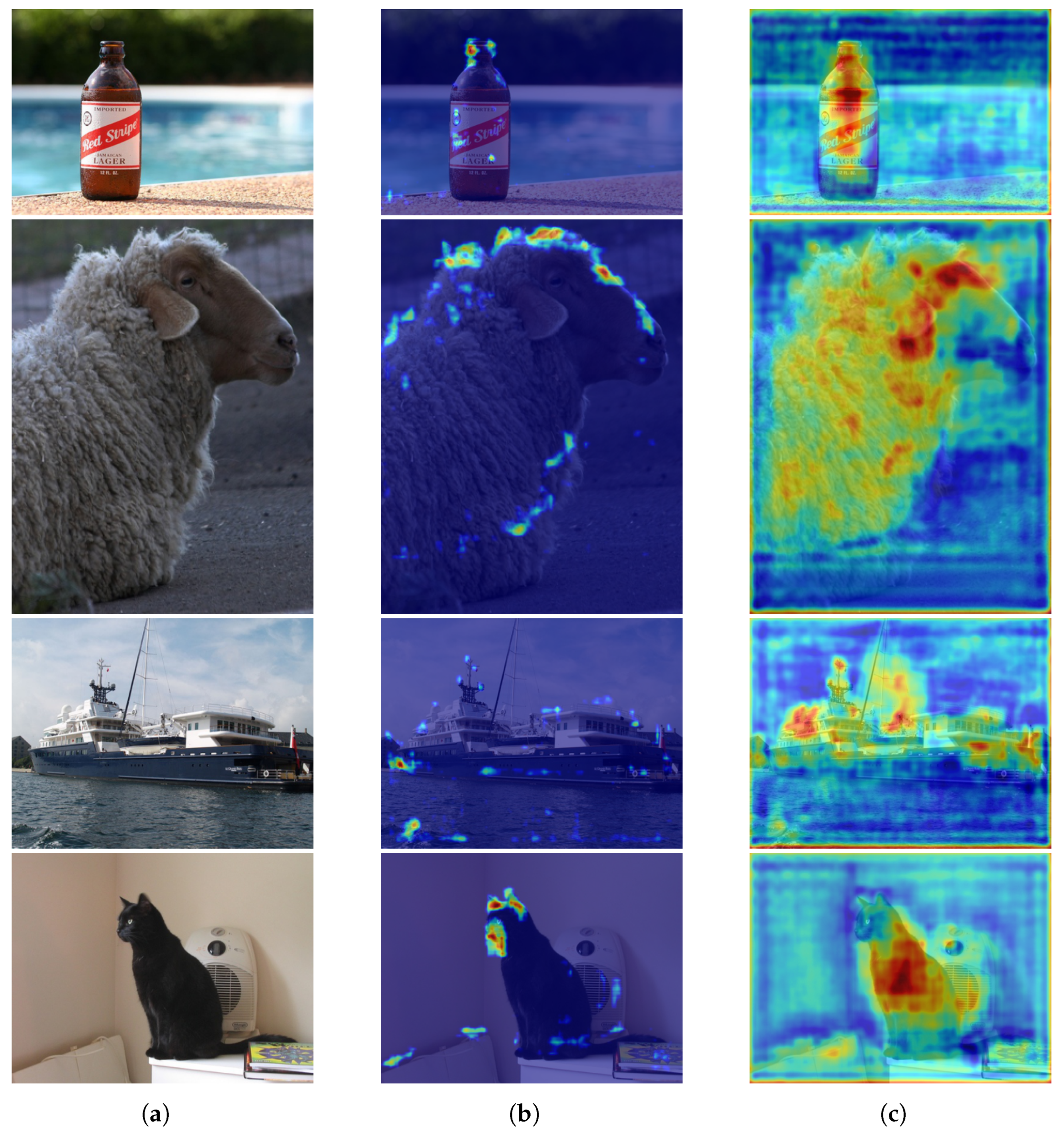
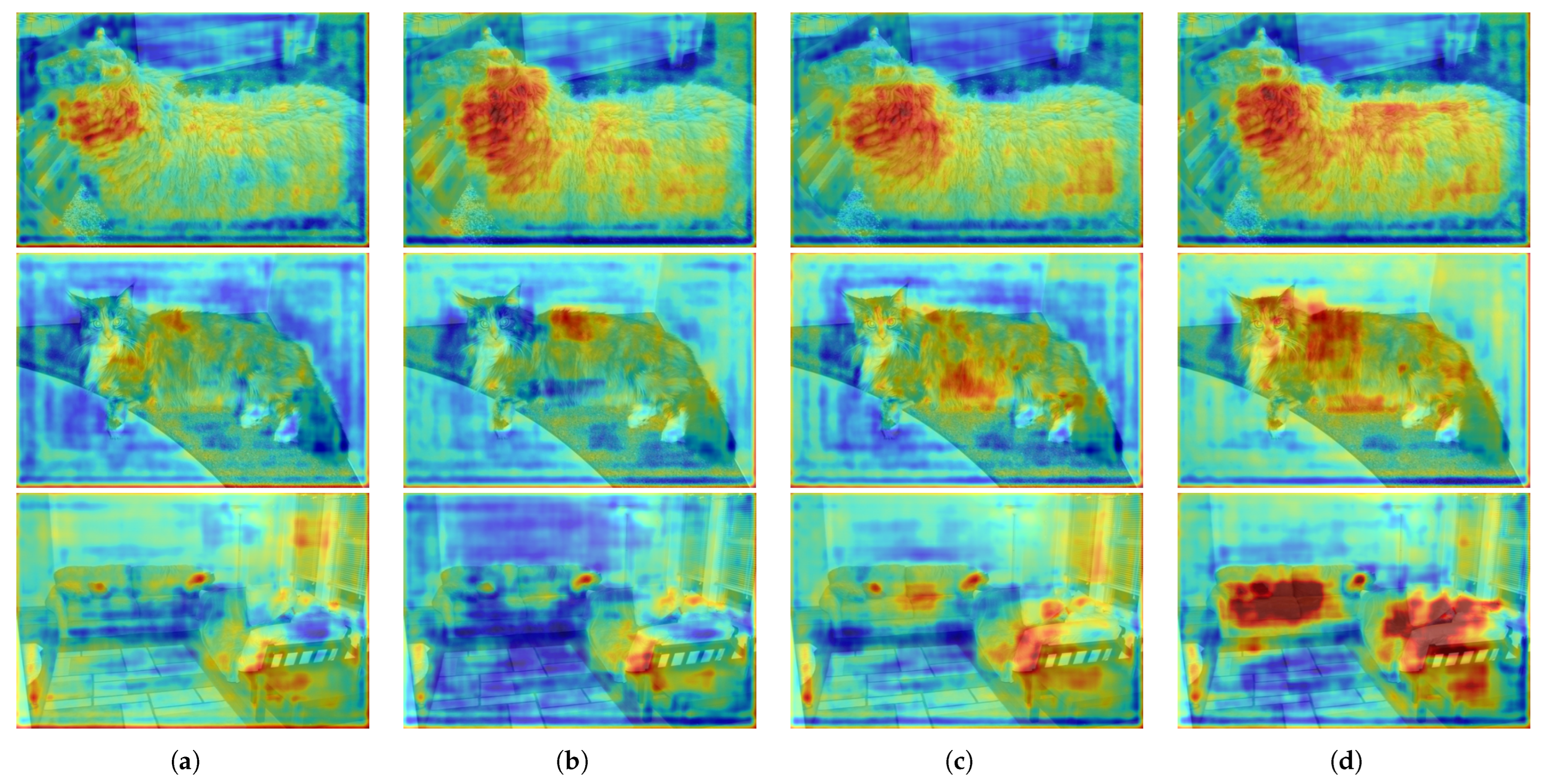
4.4.1. Visualization on Attention Map
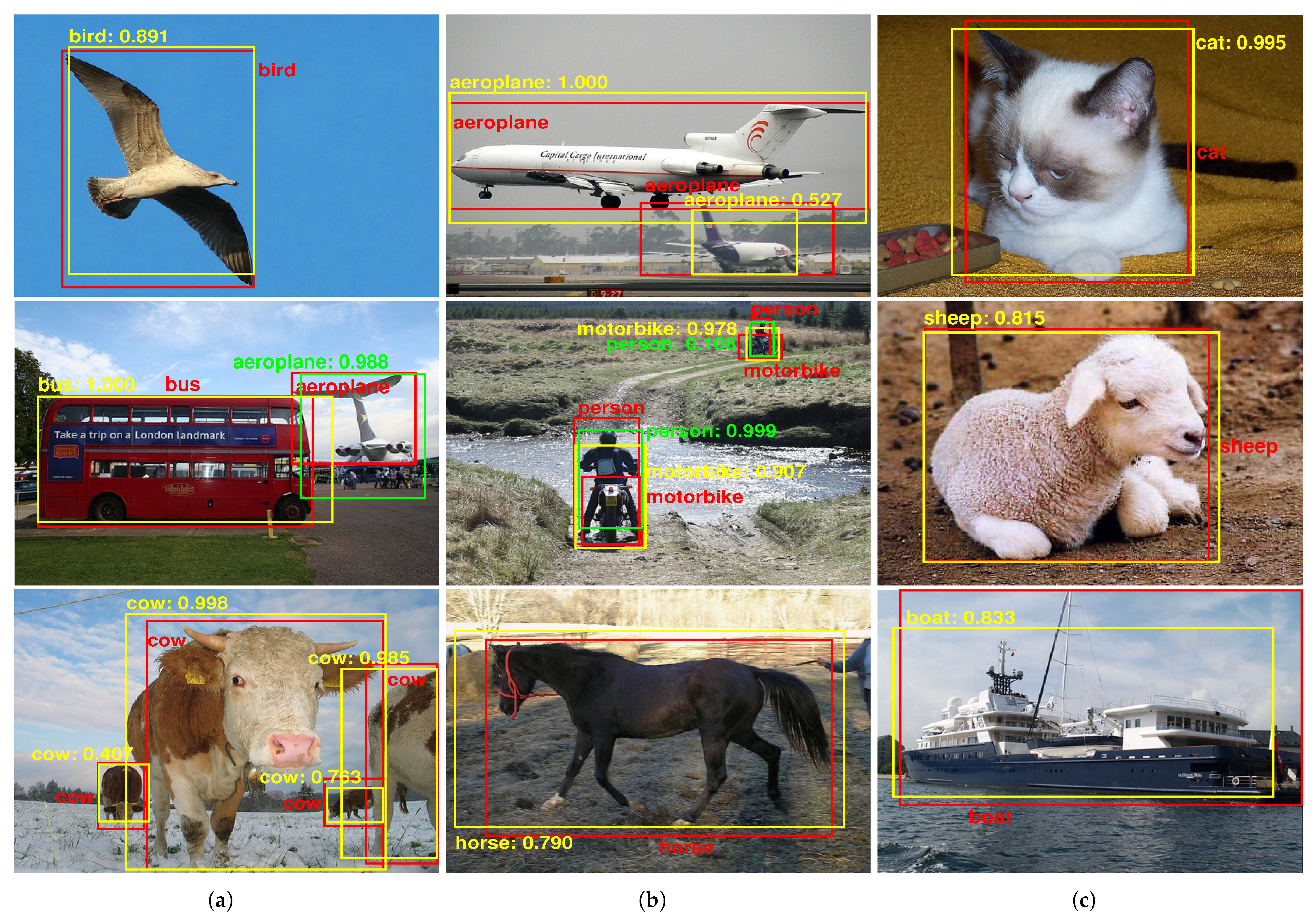
4.4.2. Visualization on Preditions
5. Ablation Studies
5.1. Ablation Study on Modules
5.2. Ablation Study on Meta-Contrastive Learning
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [PubMed]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 3rd International Conference on Learning Representations (ICLR 2015), Computational and Biological Learning Society, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Cai, Z.; Vasconcelos, N. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6154–6162. [Google Scholar]
- Wang, Y.X.; Girshick, R.; Hebert, M.; Hariharan, B. Low-shot learning from imaginary data. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 7278–7286. [Google Scholar]
- Wu, J.; Dong, N.; Liu, F.; Yang, S.; Hu, J. Feature hallucination via maximum a posteriori for few-shot learning. Knowl.-Based Syst. 2021, 225, 107129. [Google Scholar] [CrossRef]
- Sung, F.; Yang, Y.; Zhang, L.; Xiang, T.; Torr, P.H.; Hospedales, T.M. Learning to compare: Relation network for few-shot learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 1199–1208. [Google Scholar]
- Vinyals, O.; Blundell, C.; Lillicrap, T.; Wierstra, D. Matching networks for one shot learning. Adv. Neural Inf. Process. Syst. 2016, 29, 3630–3638. [Google Scholar]
- Snell, J.; Swersky, K.; Zemel, R. Prototypical networks for few-shot learning. Adv. Neural Inf. Process. Syst. 2017, 30, 4077–4087. [Google Scholar]
- Xie, J.; Long, F.; Lv, J.; Wang, Q.; Li, P. Joint distribution matters: Deep brownian distance covariance for few-shot classification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 7972–7981. [Google Scholar]
- Yang, Z.; Wang, J.; Zhu, Y. Few-shot classification with contrastive learning. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; Springer: Cham, Switzerland, 2022; pp. 293–309. [Google Scholar]
- Guo, Y.; Du, R.; Li, X.; Xie, J.; Ma, Z.; Dong, Y. Learning calibrated class centers for few-shot classification by pair-wise similarity. IEEE Trans. Image Process. 2022, 31, 4543–4555. [Google Scholar] [CrossRef]
- Bendou, Y.; Hu, Y.; Lafargue, R.; Lioi, G.; Pasdeloup, B.; Pateux, S.; Gripon, V. Easy—Ensemble augmented-shot-y-shaped learning: State-of-the-art few-shot classification with simple components. J. Imaging 2022, 8, 179. [Google Scholar] [CrossRef]
- Chi, Z.; Gu, L.; Liu, H.; Wang, Y.; Yu, Y.; Tang, J. Metafscil: A meta-learning approach for few-shot class incremental learning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 14166–14175. [Google Scholar]
- Feng, Y.; Chen, J.; Xie, J.; Zhang, T.; Lv, H.; Pan, T. Meta-learning as a promising approach for few-shot cross-domain fault diagnosis: Algorithms, applications, and prospects. Knowl.-Based Syst. 2022, 235, 107646. [Google Scholar] [CrossRef]
- Lee, K.; Maji, S.; Ravichandran, A.; Soatto, S. Meta-learning with differentiable convex optimization. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 10657–10665. [Google Scholar]
- Yan, X.; Chen, Z.; Xu, A.; Wang, X.; Liang, X.; Lin, L. Meta r-cnn: Towards general solver for instance-level low-shot learning. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9577–9586. [Google Scholar]
- Kang, B.; Liu, Z.; Wang, X.; Yu, F.; Feng, J.; Darrell, T. Few-shot object detection via feature reweighting. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8420–8429. [Google Scholar]
- Hu, H.; Bai, S.; Li, A.; Cui, J.; Wang, L. Dense relation distillation with context-aware aggregation for few-shot object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 19–25 June 2021; pp. 10185–10194. [Google Scholar]
- Chen, T.I.; Liu, Y.C.; Su, H.T.; Chang, Y.C.; Lin, Y.H.; Yeh, J.F.; Chen, W.C.; Hsu, W. Dual-awareness attention for few-shot object detection. IEEE Trans. Multimed. 2021, 25, 291–301. [Google Scholar] [CrossRef]
- Zhang, G.; Luo, Z.; Cui, K.; Lu, S.; Xing, E.P. Meta-DETR: Image-level few-shot detection with inter-class correlation exploitation. In IEEE Transactions on Pattern Analysis and Machine Intelligence; IEEE: Piscataway, NJ, USA, 2022; pp. 1–12. [Google Scholar]
- Huang, L.; Dai, S.; He, Z. Few-shot object detection with dense-global feature interaction and dual-contrastive learning. Appl. Intell. 2023, 53, 14547–14564. [Google Scholar] [CrossRef]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 7132–7141. [Google Scholar]
- Cao, Y.; Xu, J.; Lin, S.; Wei, F.; Hu, H. Gcnet: Non-local networks meet squeeze-excitation networks and beyond. In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops, Seoul, Republic of Korea, 27–28 October 2019. [Google Scholar]
- Fu, J.; Liu, J.; Tian, H.; Li, Y.; Bao, Y.; Fang, Z.; Lu, H. Dual attention network for scene segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3146–3154. [Google Scholar]
- Zhang, W.; Wang, Y.X. Hallucination improves few-shot object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 19–25 June 2021; pp. 13008–13017. [Google Scholar]
- Jaderberg, M.; Simonyan, K.; Zisserman, A. Spatial transformer networks. Adv. Neural Inf. Process. Syst. 2015, 28, 2017–2025. [Google Scholar]
- Hsieh, T.I.; Lo, Y.C.; Chen, H.T.; Liu, T.L. One-shot object detection with co-attention and co-excitation. Adv. Neural Inf. Process. Syst. 2019, 32, 2721–2730. [Google Scholar]
- Fan, Q.; Zhuo, W.; Tang, C.K.; Tai, Y.W. Few-shot object detection with attention-RPN and multi-relation detector. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 4013–4022. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. Adv. Neural Inf. Process. Syst. 2016, 29, 379–387. [Google Scholar]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision—ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Schaul, T.; Schmidhuber, J. Metalearning. Scholarpedia 2010, 5, 4650. [Google Scholar] [CrossRef]
- Koch, G.; Zemel, R.; Salakhutdinov, R. Siamese Neural Networks for One-Shot Image Recognition. Master’s Thesis, University of Toronto, Toronto, ON, Canada, 2015. [Google Scholar]
- Ravi, S.; Larochelle, H. Optimization as a model for few-shot learning. In Proceedings of the International Conference on Learning Representations, San Juan, Puerto Rico, 2–4 May 2016. [Google Scholar]
- Finn, C.; Abbeel, P.; Levine, S. Model-agnostic meta-learning for fast adaptation of deep networks. In Proceedings of the International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017; pp. 1126–1135. [Google Scholar]
- Sun, Q.; Liu, Y.; Chua, T.S.; Schiele, B. Meta-transfer learning for few-shot learning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 403–412. [Google Scholar]
- Munkhdalai, T.; Yu, H. Meta networks. In Proceedings of the International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017; pp. 2554–2563. [Google Scholar]
- Cai, Q.; Pan, Y.; Yao, T.; Yan, C.; Mei, T. Memory matching networks for one-shot image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4080–4088. [Google Scholar]
- Wang, Y.; Chao, W.L.; Weinberger, K.Q.; Van Der Maaten, L. Simpleshot: Revisiting nearest-neighbor classification for few-shot learning. arXiv 2019, arXiv:1911.04623. [Google Scholar]
- Tian, Y.; Wang, Y.; Krishnan, D.; Tenenbaum, J.B.; Isola, P. Rethinking few-shot image classification: A good embedding is all you need? In Proceedings of the Computer Vision—ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Springer: Cham, Switzerland, 2020; pp. 266–282. [Google Scholar]
- Torrey, L.; Shavlik, J. Transfer learning. In Handbook of Research on Machine Learning Applications and Trends: Algorithms, Methods, and Techniques; IGI Global: Hershey, PA, USA, 2010; pp. 242–264. [Google Scholar]
- Wang, X.; Huang, T.; Gonzalez, J.; Darrell, T.; Yu, F. Frustratingly Simple Few-Shot Object Detection. In Proceedings of the International Conference on Machine Learning, Virtual, 12–18 July 2020; pp. 9919–9928. [Google Scholar]
- Wu, J.; Liu, S.; Huang, D.; Wang, Y. Multi-scale positive sample refinement for few-shot object detection. In Proceedings of the Computer Vision—ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Springer: Cham, Switzerland, 2020; pp. 456–472. [Google Scholar]
- Sun, B.; Li, B.; Cai, S.; Yuan, Y.; Zhang, C. Fsce: Few-shot object detection via contrastive proposal encoding. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 19–25 June 2021; pp. 7352–7362. [Google Scholar]
- Qiao, L.; Zhao, Y.; Li, Z.; Qiu, X.; Wu, J.; Zhang, C. Defrcn: Decoupled faster r-cnn for few-shot object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 8681–8690. [Google Scholar]
- Wang, Y.X.; Ramanan, D.; Hebert, M. Meta-learning to detect rare objects. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9925–9934. [Google Scholar]
- Liu, W.; Wen, Y.; Yu, Z.; Yang, M. Large-margin softmax loss for convolutional neural networks. arXiv 2016, arXiv:1612.02295. [Google Scholar]
- Wang, F.; Cheng, J.; Liu, W.; Liu, H. Additive margin softmax for face verification. IEEE Signal Process. Lett. 2018, 25, 926–930. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Y.; Zhou, Z.; Ji, X.; Gong, D.; Zhou, J.; Li, Z.; Liu, W. Cosface: Large margin cosine loss for deep face recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 5265–5274. [Google Scholar]
- Deng, J.; Guo, J.; Xue, N.; Zafeiriou, S. Arcface: Additive angular margin loss for deep face recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–17 June 2019; pp. 4690–4699. [Google Scholar]
- Khosla, P.; Teterwak, P.; Wang, C.; Sarna, A.; Tian, Y.; Isola, P.; Maschinot, A.; Liu, C.; Krishnan, D. Supervised contrastive learning. Adv. Neural Inf. Process. Syst. 2020, 33, 18661–18673. [Google Scholar]
- Wang, X.; Qi, G.J. Contrastive learning with stronger augmentations. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 5549–5560. [Google Scholar] [CrossRef]
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes (voc) challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Xiao, Y.; Lepetit, V.; Marlet, R. Few-shot object detection and viewpoint estimation for objects in the wild. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 3090–3106. [Google Scholar] [CrossRef] [PubMed]
- Li, A.; Li, Z. Transformation Invariant Few-Shot Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 3094–3102. [Google Scholar]
- Wang, H.; Wang, Z.; Du, M.; Yang, F.; Zhang, Z.; Ding, S.; Mardziel, P.; Hu, X. Score-CAM: Score-weighted visual explanations for convolutional neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 24–25. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Type | Class Split 1 | Class Split 2 | Class Split 3 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 Shot | 2 Shot | 3 Shot | 5 Shot | 10 Shot | 1 Shot | 2 Shot | 3 Shot | 5 Shot | 10 Shot | 1 Shot | 2 Shot | 3 Shot | 5 Shot | 10 Shot | ||
| TFA | Finetune | 25.3 | 36.4 | 42.1 | 47.9 | 52.8 | 18.3 | 27.5 | 30.9 | 34.1 | 39.5 | 17.9 | 27.2 | 34.3 | 40.8 | 45.6 |
| MPSR | Finetune | 30.0 | 39.1 | 46.8 | 55.2 | 60.3 | 18.7 | 29.1 | 29.5 | 38.2 | 44.6 | 18.9 | 32.8 | 39.3 | 43.9 | 52.6 |
| FSCE | Finetune | 33.1 | 40.3 | 46.9 | 51.6 | 59.7 | 24.2 | 26.8 | 37.2 | 41.7 | 48.5 | 22.6 | 33.4 | 39.5 | 47.3 | 54.1 |
| FSRW | Meta | 14.8 | 15.5 | 26.7 | 33.9 | 47.2 | 15.7 | 15.2 | 22.7 | 30.1 | 40.5 | 21.3 | 25.6 | 28.4 | 42.8 | 45.9 |
| MetaDet | Meta | 18.9 | 20.6 | 30.2 | 36.8 | 49.6 | 21.8 | 23.1 | 27.8 | 31.7 | 43.0 | 20.6 | 23.9 | 29.4 | 43.9 | 44.1 |
| MetaRCNN | Meta | 19.9 | 25.5 | 35.0 | 45.7 | 51.5 | 10.4 | 19.4 | 29.6 | 34.8 | 45.4 | 14.3 | 18.2 | 27.5 | 41.2 | 48.1 |
| FsDetView | Meta | 24.2 | 35.3 | 42.2 | 49.1 | 57.4 | 21.6 | 24.6 | 31.9 | 37.0 | 45.7 | 21.2 | 30.0 | 37.2 | 43.8 | 49.6 |
| TIP | Meta | 27.2 | 36.5 | 43.3 | 50.2 | 59.6 | 22.7 | 30.1 | 33.8 | 40.9 | 46.9 | 21.7 | 30.6 | 38.1 | 44.5 | 50.9 |
| DCNet | Meta | 33.9 | 37.4 | 43.7 | 51.1 | 59.6 | 23.2 | 24.8 | 30.6 | 36.7 | 46.6 | 32.3 | 34.9 | 39.7 | 42.6 | 50.7 |
| DAnA | Meta | 31.0 | 41.7 | 47.8 | 51.2 | 54.8 | 23.3 | 24.3 | 35.8 | 37.5 | 44.0 | 32.1 | 38.5 | 43.2 | 50.1 | 52.0 |
| DGFI | Meta | 35.9 | 43.7 | 50.7 | 56.2 | 61.3 | 26.9 | 27.8 | 39.0 | 43.2 | 51.1 | 34.8 | 41.2 | 44.2 | 51.4 | 56.8 |
| Ours | Meta | 36.1 | 44.2 | 50.0 | 56.3 | 59.9 | 25.3 | 37.2 | 43.9 | 44.0 | 48.7 | 35.1 | 41.8 | 44.8 | 52.9 | 56.9 |
| LFEM | IFTM | GCAN | 1 Shot | 2 Shot | 3 Shot | 5 Shot | 10 Shot |
|---|---|---|---|---|---|---|---|
| ✔ | 32.1 | 37.0 | 43.1 | 49.0 | 54.6 | ||
| ✔ | ✔ | 30.0 | 33.7 | 34.4 | 44.1 | 45.9 | |
| ✔ | ✔ | 32.7 | 32.3 | 40.5 | 42.8 | 49.4 | |
| ✔ | ✔ | ✔ | 35.1 | 41.8 | 44.8 | 52.9 | 56.9 |
| Full Modules | 1 Shot | 2 Shot | 3 Shot | 5 Shot | 10 Shot | ||
|---|---|---|---|---|---|---|---|
| ✔ | 29.8 | 30.8 | 39.2 | 43.0 | 44.2 | ||
| ✔ | ✔ | 29.0 | 33.0 | 40.5 | 44.7 | 45.6 | |
| ✔ | ✔ | 33.4 | 36.4 | 40.9 | 44.3 | 48.0 | |
| ✔ | ✔ | ✔ | 35.1 | 41.8 | 44.8 | 52.9 | 56.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, H.; Zhang, P. Few-Shot Object Detection with Local Feature Enhancement and Feature Interrelation. Electronics 2023, 12, 4036. https://doi.org/10.3390/electronics12194036
Lai H, Zhang P. Few-Shot Object Detection with Local Feature Enhancement and Feature Interrelation. Electronics. 2023; 12(19):4036. https://doi.org/10.3390/electronics12194036
Chicago/Turabian StyleLai, Hefeng, and Peng Zhang. 2023. "Few-Shot Object Detection with Local Feature Enhancement and Feature Interrelation" Electronics 12, no. 19: 4036. https://doi.org/10.3390/electronics12194036