
Sensor Management with Dynamic Clustering for Bearings-Only Multi-Target Tracking via Swarm Intelligence Optimization
Abstract
:1. Introduction
- A threshold control method is proposed to reduce the impact of defective bearings-only sensors on multi-target tracking accuracy by SMC-CBMeMBer filtering.
- An information center is defined and formulated to represent an information level in the surveillance area as the foundation of clustering implementation.
- A new objective function is constructed to find the optimal sensor subset around the optimal information center and efficiently solved using the swarm intelligence optimization algorithm.
- The dynamic clustering strategy is utilized to determine CH and CM sensors for balancing energy consumption and prolonging the network lifetime.
2. Preliminaries
2.1. Multi-Target Bayesian Framework Using Multi-Bernoulli RFS
2.2. SMC-CBMeMBer Filter
- (1)
- Prediction:
- (2)
- Update:
2.3. CS Divergence
3. Sensor Management Solution
3.1. Sensor Management for Bearings-Only Multi-Target Tracking
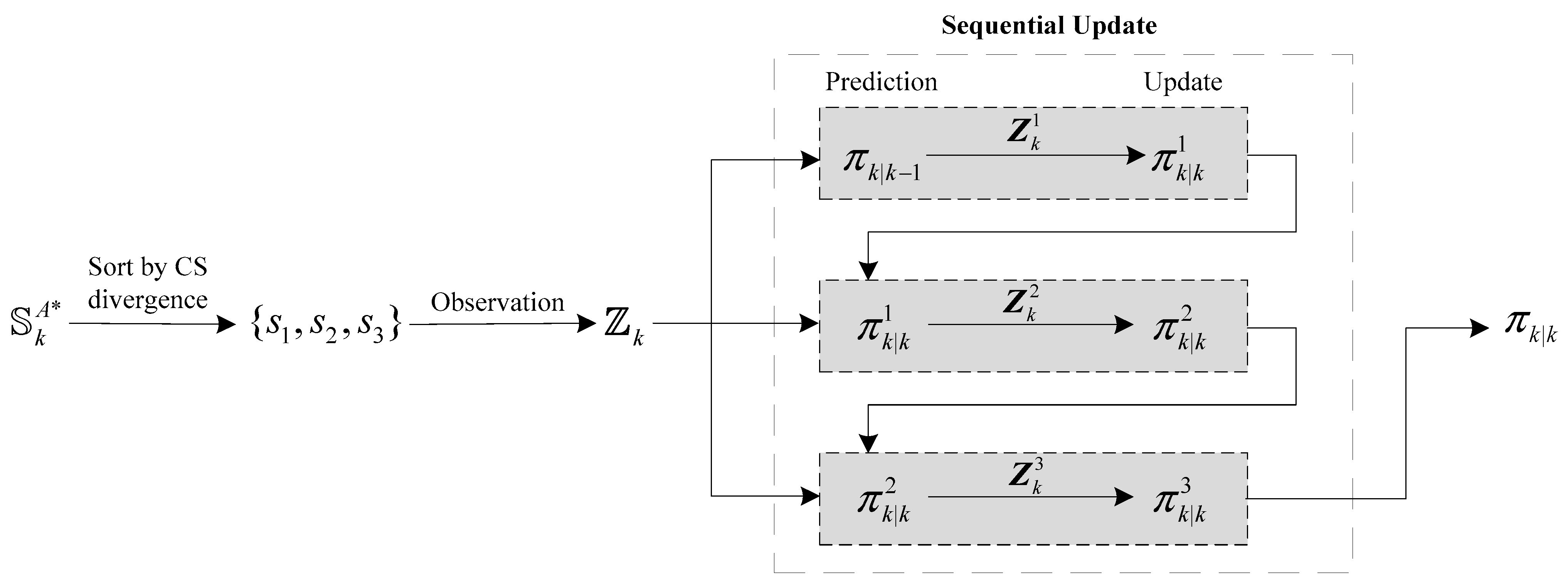
- Although multiple sensors are selected to meet the state observability, the quality of reserved particle samples within the sequential update process will still be impacted because only one sensor’s measurements can be used at a time. This might result in reduced tracking accuracy and even loss of targets.
- The selected sensors will transmit their measurement data and consume enormous energy. Meanwhile, the energy consumption is usually unbalanced due to the target motion path and sensor deployment. This will speed up energy exhaustion and shorten the network lifetime.
3.2. Objective Function and Swarm Intelligence Optimization
3.2.1. Threshold Control for Bearings-Only Measurement
3.2.2. Objective Function Construction
3.2.3. Optimization
3.3. Dynamic Clustering Strategy
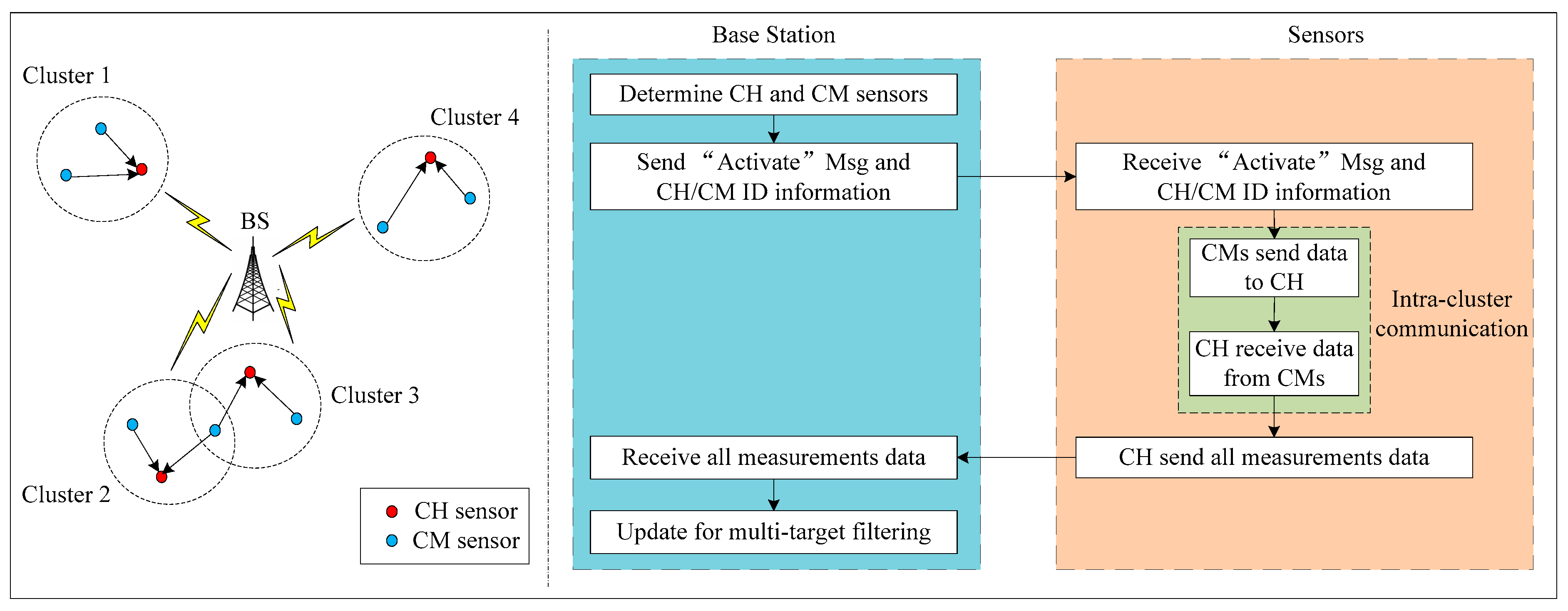
- Step 1: The base station determines the CH and CM sensors by the remaining energy of each sensor in , and then sends a message “Activate” and the CH/CM ID information to the selected sensors.
- Step 2: The selected sensors receive the message “Activate” and the CH/CM ID information, and then a new cluster is formed.
- Step 3: All activated sensors sense targets and obtain their measurements with their own data processing units. The CM sensors send their measurements to the CH sensor, then the CH sensor sends all measurement data to the base station.
- Step 4: The base station runs the SMC-CBMeMBer filter using received measurement data to obtain the multi-target state estimation. Then, it returns to sensor selection optimization for tracking at the next time point.
3.4. Multi-Sensor Multi-Bernoulli Density Fusion with Sequential Update
3.5. The Complete Solution
| Algorithm 1: The complete sensor management solution |
| Input: multi-target density , multi-target state estimate , candidate sensor set , and the remaining energy of each sensor . Solution: 1: Execute the prediction steps of SMC-CBMeMBer, then obtain the predicted multi-target density ; 2: For each Bernoulli RFS , compute by , which is comprised of weighted samples . For each sensor , compute its corresponding PIMS by the observation model with . Then, update by and then compute (using Equation (31)); 3: Threshold control: For two predicted target states and , compute (using Equation (32)) and (using Equation (33)) for each sensor . For any with both and being satisfied simultaneously, modify (using Equation (34)); 4: Optimization: run the PSO algorithm for solving the objective function (calculated by Equations (35)–(38)), then obtain the optimal sensor subset ; 5: Use dynamic clustering strategy to determine CM and CH sensors by their remaining energy, and then complete the measurement data transmission; 6: Rank sensors in from low CS divergence to high CS divergence, then perform SMC-CBMeMBer filtering with sequential update in this sequence. 7: Update the remaining energy of all sensors in the network and then obtain the candidate sensos set including all live sensors; Output: multi-target density and multi-target state estimate . |
4. Simulations and Performance Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, H.; Zhou, G.; Bhatia, L.; Zhu, Z.; Li, W.; McCann, J.A. Energy-Neutral and QoS-Aware Protocol in Wireless Sensor Networks for Health Monitoring of Hoisting Systems. IEEE Trans. Ind. Inform. 2020, 16, 5543–5553. [Google Scholar] [CrossRef] [Green Version]
- Kumar, P.; Udayakumar, A.; Kumar, A.A.; Kannan, K.S.; Krishnan, N. Multiparameter optimization system with DCNN in precision agriculture for advanced irrigation planning and scheduling based on soil moisture estimation. Environ. Monit. Assess 2023, 195, 13. [Google Scholar] [CrossRef]
- Kaur, P.; Kaur, K.; Singh, K.; Kim, S. Early Forest Fire Detection Using a Protocol for Energy-Efficient Clustering with Weighted-Based Optimization in Wireless Sensor Networks. Appl. Sci. 2023, 13, 3048. [Google Scholar] [CrossRef]
- Du, B.; Qian, K.; Claudel, C.; Sun, D. Parallelized Active Information Gathering Using Multisensor Network for Environment Monitoring. IEEE Trans. Control Syst. Technol. 2022, 30, 625–638. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Hu, C.; Mao, P.; Liu, B. IACRA: Lifetime Optimization by Invulnerability-Aware Clustering Routing Algorithm Using Game-Theoretic Approach for Wsns. Sensors 2022, 22, 7936. [Google Scholar] [CrossRef]
- Anvaripour, M.; Saif, M.; Ahmadi, M. A Novel Approach to Reliable Sensor Selection and Target Tracking in Sensor Networks. IEEE Trans. Ind. Inform. 2020, 16, 171–182. [Google Scholar] [CrossRef]
- Liu, F.; Jiang, C.; Xiao, W. Multistep Prediction-Based Adaptive Dynamic Programming Sensor Scheduling Approach for Collaborative Target Tracking in Energy Harvesting Wireless Sensor Networks. IEEE Trans. Autom. Sci. Eng. 2021, 18, 693–704. [Google Scholar] [CrossRef]
- Feng, J.; Zhao, H. Dynamic Nodes Collaboration for Target Tracking in Wireless Sensor Networks. IEEE Sens. J. 2021, 21, 21069–21079. [Google Scholar] [CrossRef]
- Akhondali, J.; Taheri, M. Stable Target Tracking in Wireless Sensor Networks Under Malicious Cyber Attacks. In Proceedings of the 30th International Conference on Electrical Engineering (ICEE), Tehran, Iran, 17–19 May 2022. [Google Scholar] [CrossRef]
- Liu, X.; Mihaylova, L.; George, J.; Pham, T. Gaussian Process Upper Confidence Bounds in Distributed Point Target Tracking Over Wireless Sensor Networks. IEEE J. Sel. Top. Signal Process. 2023, 17, 295–310. [Google Scholar] [CrossRef]
- Zhu, Y.; Liang, S.; Gong, M.; Yan, J. Decomposed POMDP Optimization-Based Sensor Management for Multi-Target Tracking in Passive Multi-Sensor Systems. IEEE Sens. J. 2022, 22, 3565–3578. [Google Scholar] [CrossRef]
- Mahler, R. Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2007. [Google Scholar]
- Mahler, R. Advances in Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2014. [Google Scholar]
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Multi-Bernoulli sensor-selection for multi-target tracking with unknown clutter and detection profiles. Singal Process. 2016, 119, 28–42. [Google Scholar] [CrossRef]
- Vo, B.-T.; Vo, B.-N.; Cantoni, A. The Cardinality Balanced Multi-Target Multi-Bernoulli Filter and Its Implementations. IEEE Trans. Signal Process. 2009, 57, 409–423. [Google Scholar] [CrossRef] [Green Version]
- Reuter, S.; Vo, B.-T.; Vo, B.-N.; Dietmayer, K. The Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar] [CrossRef]
- Vo, B.-N.; Vo, B.-T.; Phung, D. Labeled Random Finite Sets and the Bayes Multi-Target Tracking Filter. IEEE Trans. Signal Process. 2014, 62, 6554–6567. [Google Scholar] [CrossRef] [Green Version]
- Vo, B.-N.; Vo, B.-T. A Multi-Scan Labeled Random Finite Set Model for Multi-Object State Estimation. IEEE Trans. Signal Proces. 2019, 67, 4948–4963. [Google Scholar] [CrossRef] [Green Version]
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A.; Liu, W. Sensor-Management for Multitarget Filters via Minimization of Posterior Dispersion. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2877–2884. [Google Scholar] [CrossRef]
- Hoang, H.G.; Vo, B.-T. Sensor management for multi-target tracking via multi-Bernoulli filtering. Automatica 2014, 50, 1135–1142. [Google Scholar] [CrossRef] [Green Version]
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Multi-Bernoulli sensor control for multi-target tracking. In Proceedings of the IEEE 8th International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, VIC, Australia, 2–5 April 2013. [Google Scholar] [CrossRef]
- Mahler, R. Multitarget sensor management of dispersed mobile sensors. In Theory and Algorithms for Cooperative Systems; Grunel, D., Murphey, R., Pardalos, P.M., Eds.; World Scientific: Singapore, 2004; Volume 4, pp. 239–310. [Google Scholar] [CrossRef]
- Mahler, R. Sensor management with non-ideal sensor dynamics. In Proceedings of the 7th International Conference on Information Fusion (FUSION), Stockholm, Sweden, 28 June–1 July 2004. [Google Scholar]
- Mahler, R. Unified sensor management using CPHD filters. In Proceedings of the 10th International Conference on Information Fusion (FUSION), Quebec, QC, Canada, 9–12 July 2007. [Google Scholar] [CrossRef]
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Robust Multi-Bernoulli Sensor Selection for Multi-Target Tracking in Sensor Networks. IEEE Signal Process. Lett. 2013, 20, 1167–1170. [Google Scholar] [CrossRef]
- Panicker, S.; Gostar, A.K.; Bab-Haidashar, A.; Hoseinnezhad, R. Sensor Control for Selective Object Tracking Using Labeled Multi-Bernoulli Filter. In Proceedings of the 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, J.; Liang, S. Multi-Objective Optimization Based Multi-Bernoulli Sensor Selection for Multi-Target Tracking. Sensors 2019, 19, 980. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aoki, E.H.; Bagchi, A.; Mandal, P.; Boers, Y. A theoretical look at information-driven sensor management criteria. In Proceedings of the 14th International Conference on Information Fusion (FUSION), Chicago, IL, USA, 5–8 July 2011. [Google Scholar]
- Manyika, J.; Durrant-Whyte, H. Data Fusion and Sensor Management: A Decentralized Information-Theoretic Approach; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Schmaedeke, W.W.; Kastella, K.D. Event-averaged maximum likelihood estimation and information-based sensor management. In Proceedings of the SPIE, Orlando, FL, USA, 10 June 1994. [Google Scholar] [CrossRef]
- Kastella, K. Discrimination gain to optimize detection and classification. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 1997, 27, 112–116. [Google Scholar] [CrossRef] [Green Version]
- Ristic, B.; Vo, B.-N. Sensor control for multi-object state-space estimation using random finite sets. Automatica 2010, 46, 1812–1818. [Google Scholar] [CrossRef]
- Ristic, B.; Vo, B.-N.; Clark, D. A note on the reward function for PHD filters with sensor control. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1521–1529. [Google Scholar] [CrossRef]
- Cai, H.; Ghehly, S.; Yang, Y.; Hoseinnezhad, R. Multisensor Tasking using analytical renyi divergence in labeled multi-Bernoulli filtering. J. Guid. Control Dyn. 2019, 42, 2078–2085. [Google Scholar] [CrossRef]
- Hoang, H.G.; Vo, B.-N.; Vo, B.-T.; Mahler, R. The Cauchy-Schwarz divergence for Poisson point processes. IEEE Trans. Inf. Theory 2015, 61, 4475–4485. [Google Scholar] [CrossRef] [Green Version]
- Beard, M.; Vo, B.-T.; Vo, B.-N.; Arulampalam, S. Void Probabilities and Cauchy-Schwarz Divergence for Generalized Labeled Muti-Bernoulli Models. IEEE Trans. Signal Process. 2017, 65, 5047–5061. [Google Scholar] [CrossRef] [Green Version]
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Multi-Bernoulli Sensor Control using Cauchy-Schwarz Divergence. In Proceedings of the 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016. [Google Scholar]
- Jiang, M.; Yi, W.; Kong, L. Multi-Sensor Control for Multi-Target Tracking using Cauchy-Schwarz Divergence. In Proceedings of the 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report-TR06; Engineering Faculty, Computer Engineering Department, Erciyes University: Talas, Turkey, 2005. [Google Scholar]
- Cuevas, E.; Cienfuegos, M.; Zaldívar, D.; Pérez-Cisneros, M. A swarm optimization algorithm inspired in the behavior of the social-spider. Expert Syst. Appl. 2013, 40, 6374–6384. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.S.; Slowik, A. Firefly algorithm. In Swarm Intelligence Algorithms; CRC Press: Boca Raton, FL, USA, 2020; pp. 163–174. [Google Scholar] [CrossRef]
- Beard, M.; Vo, B.-T.; Vo, B.-N.; Arulampalam, S. Sensor control for multi-target tracking using Cauchy-schwarz divergence. In Proceedings of the 18th International Conference on Information Fusion (FUSION), Washington, DC, USA, 6–9 July 2015. [Google Scholar]
- Gostar, A.K.; Hoseinnezhad, R. Bab-Hadiashar, A. Multi-Bernoulli Sensor Control via Minimization of expected estimation errors. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1762–1773. [Google Scholar] [CrossRef] [Green Version]
- Liang, S.; Zhu, Y.; Li, H.; Yan, J. Evolutionary Computational Intelligence-Based Multi-Objective Sensor Management for Multi-Target Tracking. Remote Sens. 2022, 14, 3624. [Google Scholar] [CrossRef]
- Blair, A.; Gostar, A.K.; Tennakoon, R.; Bab-Hadiashar, A.; Li, X.; Palmer, J.; Hoseinnezhad, R. Distributed Multi-Sensor Control for Multi-Target Tracking. In Proceedings of the 11th International Conference on Control, Automation and Information Sciences (ICCAIS), Hanoi, Vietnam, 21–24 November 2022. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, L.; Wei, Q.; Zhao, B. Sensor Management Based on Convex Optimization via PCRLB and Joint Interception Probability. In Proceedings of the IEEE Sensors, Dallas, TX, USA, 30 October–2 November 2022. [Google Scholar] [CrossRef]
- Zhu, Y.; Liang, S.; Xue, G.; Wu, X. An efficient multi-objective optimization approach for sensor management via multi-Bernoulli filtering. EURASIP J. Adv. Signal Process. 2022, 62. [Google Scholar] [CrossRef]
- Panicker, S.; Gostar, A.K.; Bab-Hadiashar, A. Tracking of Targets of Interest using Labeled multi-Bernoulli filter with multi-sensor control. Signal Process 2020, 171, 107451. [Google Scholar] [CrossRef]
- Sun, T.; Xin, M. Bearings-Only Tracking Using Augmented Ensemble Kalman Filter. IEEE Trans. Control Syst. Technol. 2020, 28, 1009–1016. [Google Scholar] [CrossRef]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 7 January 2000. [Google Scholar] [CrossRef]
- Lindsey, S.; Raghavendra, C. PEGASIS: Power-efficient gathering in sensor information systems. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 9–16 March 2002. [Google Scholar] [CrossRef]
- Younis, O.; Fahmy, S. HEED: A hybrid, energy-efficient, distributed clustering approach for ad hoc sensor networks. IEEE Trans. Mob. Comput. 2004, 3, 366–379. [Google Scholar] [CrossRef] [Green Version]
- Sasirekha, S.; Swamynathan, S. Cluster-chain mobile agent routing algorithm for efficient data aggregation in wireless sensor network. J. Commun. Netw. 2017, 19, 392–401. [Google Scholar] [CrossRef]
- Alagirisamy, M.; Chow, C. An energy based cluster head selection unequal clustering algorithm with dual sink (ECH-DUAL) for continuous monitoring applications in wireless sensor networks. Clust. Comput. 2018, 21, 91–103. [Google Scholar] [CrossRef]
- Yang, L.; Lu, Y.; Zhong, Y. An unequal cluster-based routing scheme for multi-level heterogeneous wireless sensor networks. Telecommun. Syst. 2017, 68, 11–26. [Google Scholar] [CrossRef]
- Mohamed, E.; Hassanien, A.E. Optimizing cluster head selection in WSN to prolong its existence. In Dynamic Wireless Sensor Networks; Springer: Berlin, Germany, 2019; Volume 165, pp. 93–111. [Google Scholar] [CrossRef]
- Bailey, T.; Julier, S.; Agamennoni, G. On conservative fusion of information with unknown non-Gaussian dependence. In Proceedings of the 2012 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; Available online: https://api.semanticscholar.org/CorpusID:15281570 (accessed on 30 August 2012).
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Cauchy-Schwarz divergence-based distributed fusion with Poisson random finite sets. In Proceedings of the 2017 International Conference on Control, Automation and Information Sciences (ICCAIS), Chiang Mai, Thailand, 31 October–1 November 2017. [Google Scholar] [CrossRef]
- Mahler, R.P. Optimal/robust distributed data fusion: A unified approach. In Proceedings of the SPIE 4052, Signal Processing, Sensor Fusion, and Target Recognition IX, Orlando, FL, USA, 4 August 2000. [Google Scholar] [CrossRef]
- Li, T.; Wang, X.; Liang, Y.; Pan, Q. On Arithmetic Average Fusion and Its Application for Distributed Multi-Bernoulli Multitarget Tracking. IEEE Trans. Signal Process. 2020, 68, 2883–2896. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L.; Fantacci, C.; Farina, A.; Vo, B.N. Average Kullback-Leibler divergence for random finite sets. In Proceedings of the International Conference on Information Fusion (Fusion), Washington, DC, USA, 6–9 July 2015; Available online: https://api.semanticscholar.org/CorpusID:15318086 (accessed on 17 September 2015).
- Yi, W.; Chai, L. Heterogeneous multi-sensor fusion with random finite set multi-object densities. IEEE Trans. Signal Process. 2021, 69, 3399–3414. [Google Scholar] [CrossRef]
- Yi, W.; Li, G.; Battistelli, G. Distributed multi-sensor fusion of PHD filters with different sensor fields of view. IEEE Trans. Signal Process. 2020, 68, 5204–5218. [Google Scholar] [CrossRef]
- Da, K.; Li, T.; Zhu, Y.; Fan, H.; Fu, Q. Kullback-Leibler Averaging for Multitarget Density Fusion. In Proceedings of the International Symposium on Distributed Computing and Artificial Intelligence, Ávila, Spain, 26–28 June 2019. [Google Scholar] [CrossRef]
- Wang, B.; Yi, W.; Hoseinnezhad, R.; Li, S.; Kong, L.; Yang, X. Distributed fusion with multi-Bernoulli filter based on generalized covariance intersection. IEEE Trans. Signal Process. 2017, 65, 242–255. [Google Scholar] [CrossRef] [Green Version]
- Castanon, D.A.; Carin, L. Stochastic control theory for sensor management. In Foundations and Applications of Sensor Management; Springer: Boston, MA, USA, 2008; pp. 7–32. [Google Scholar] [CrossRef]
- Lee, S.-H.; Cheng, C.-H.; Lin, C.-C.; Huang, Y.-F. PSO-Based Target Localization and Tracking in Wireless Sensor Networks. Electronics 2023, 12, 905. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Sangaiah, A.K.; Kim, H.-J. An Improved Routing Schema with Special Clustering Using PSO Algorithm for Heterogeneous Wireless Sensor Network. Sensors 2019, 19, 671. [Google Scholar] [CrossRef] [PubMed]
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef] [Green Version]
- Kaplan, L.M. Global node selection for localization in a distributed sensor network. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 113–135. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Target birth | Existence probability | |
| Birth state | ||
| Birth state | ||
| Birth state | ||
| Birth state | ||
| Covariance matrix | ||
| Survival probability | 0.99 | |
| Detection probability | 0.98 | |
| Clutter intensity | ||
| Pruning of hypothesized tracks | Weight threshold | |
| Maximum of tracks | 100 | |
| Number of particles per track | Maximum of particles | 1000 |
| Minimum of particles | 300 | |
| Parameter | Value |
|---|---|
| Population size | 20 |
| Population initialization | random generation in surveillance region |
| The velocity of particles | random generation between |
| The inertia weight factor | |
| The acceleration coefficient | 0.4 |
| The acceleration coefficient | 0.6 |
| Maximum iterations | 30 |
| Time | Target Position | Sensor Selection | Sensor Position | Measurements * |
|---|---|---|---|---|
| = 9 | T1: (−445, 710) | S1: 31 | S1: (−673.5399, −637.0967) | S1: [0.1799 1.1491 0.0525] |
| T2: (420, −155) | S2: 15 | S2: (−676.6684, −554.8164) | S2: [0.1952 1.2168 0.1240] | |
| T3: (−665, −465) | S3: 4 | S3: (−678.5361, −473.1620) | S3: [0.2155 1.2746 1.0528] | |
| = 11 | T1: (−455, 690) | S1: 81 | S1: (−502.9808, 878.2477) | S1: [2.8907 2.4469 3.2643] |
| T2: (380, −145) | S2: 54 | S2: (−343.0001, 935.0870) | S2: [3.6034 2.5462 3.3676] | |
| T3: (−635, −435) | S3: 9 | S3: (−530.8344, 754.1318) | S3: [2.3021 2.3828 3.2264] | |
| = 41 | T1: (−605, 390) | S1: 36 | S1: (−144.9029, 144.6242) | S1: [5.1852 3.6387 3.4382 6.047] |
| T2: (−220, 5) | S2: 1 | S2: (−163.6571, −137.9836) | S2: [5.5811 5.9062 6.1385 6.1043] | |
| T3: (−185, 15) T4: (−280, 680) | S3: 53 | S3: (−156.4971, 95.5383) | S3: [5.3050 3.7520 3.4959 6.0728] | |
| = 60 | T1: (−700, 200) | S1: 90 | S1: (930.5675, −341.4665) | S1: [5.0168 5.3709 5.3832 3.6625] |
| T2: (100, 300) | S2: 89 | S2: (539.4818, −302.1271) | S2: [5.1041 5.6608 5.6113 2.4422] | |
| T3: (−90, 490) T4: (780, −605) | S3: 19 | S3: (843.1165, −583.6014) | S3: [5.1958 5.5955 5.5741 4.3671] | |
| = 84 | T1: (460, 660) | S1: 58 | S1: (419.9635, 743.6434) | S1: [2.6678 3.6083 3.2350] |
| T2: (150, 250) | S2: 43 | S2: (446.8321, 717.6404) | S2: [2.9175 3.6913 3.2450] | |
| T3: (300, −725) | S3: 99 | S3: (464.7387, 712.6752) | S3: [3.2142 3.7250 3.2340] |
| Time | Target Position | Sensor Selection | Sensor Position | Measurements * |
|---|---|---|---|---|
| = 10 | T1: (−450, 700) | S1: 19 | S1: (843.1165, −583.6014) | S1: [5.4974 5.5089 4.7978] |
| T2: (400, −15) | S2: 4 | S2: (−678.5361, −473.1620) | S2: [0.1944 1.2805 0.8721] | |
| T3: (−650, −450) | S3: 92 | S3: (432.6182, −143.2534) | S3: [5.4751 4.5264 4.4468] | |
| = 12 | T1: (−460, 680) | S1: 92 | S1: (432.6182, −143.2534) | S1: [5.4438 4.7506 4.4633] |
| T2: (360, −140) | S2: 19 | S2: (843.1165, −583.6014) | S2: [5.4847 5.4496 4.8183] | |
| T3: (−620, −420) | S3: 55 | S3: (−478.4727, −465.9557) | S3: [6.2710 1.1885 5.0214] | |
| = 41 | T1: (−605, 390) | S1: 80 | S1: (−411.8393, 205.5174) | S1: [5.4884 2.3698 2.2687 0.2706] |
| T2: (−220, 5) | S2: 53 | S2: (−156.4971, 95.5383) | S2: [5.3050 3.7520 3.4959 6.0728] | |
| T3: (−185, 15) T4: (−280, 680) | S3: 1 | S3: (−163.6571, −137.9836) | S3: [5.5811 5.9062 6.1385 6.1043] | |
| = 60 | T1: (−700, 200) | S1: 18 | S1: (10.3578, 408.7489) | S1: [4.4338 2.4627 5.3945 2.4854] |
| T2: (100, 300) | S2: 39 | S2: (144.1419, 257.6447) | S2: [4.6687 5.4718 5.4913 2.5241] | |
| T3: (−90, 490) T4: (780, −605) | S3: 19 | S3: (843.1165, −583.6014) | S3: [5.1958 5.5955 5.5741 4.3671] | |
| = 71 | T1: (265, 465) | S1: 66 | S1: (313.5009, 511.3323) | S1: [3.9714 4.2779 2.9518] |
| T2: (20, 380) | S2: 8 | S2: (426.0601, −790.5447) | S2: [6.1574 5.9508 0.7933] | |
| T3: (560, −660) | S3: 18 | S3: (10.3578, 408.7489) | S3: [1.3465 2.7801 2.6861] |
| Solution | Total Energy Consumption (J) | The Standard Deviation of Remaining Energy | OSPA Distance (m) |
|---|---|---|---|
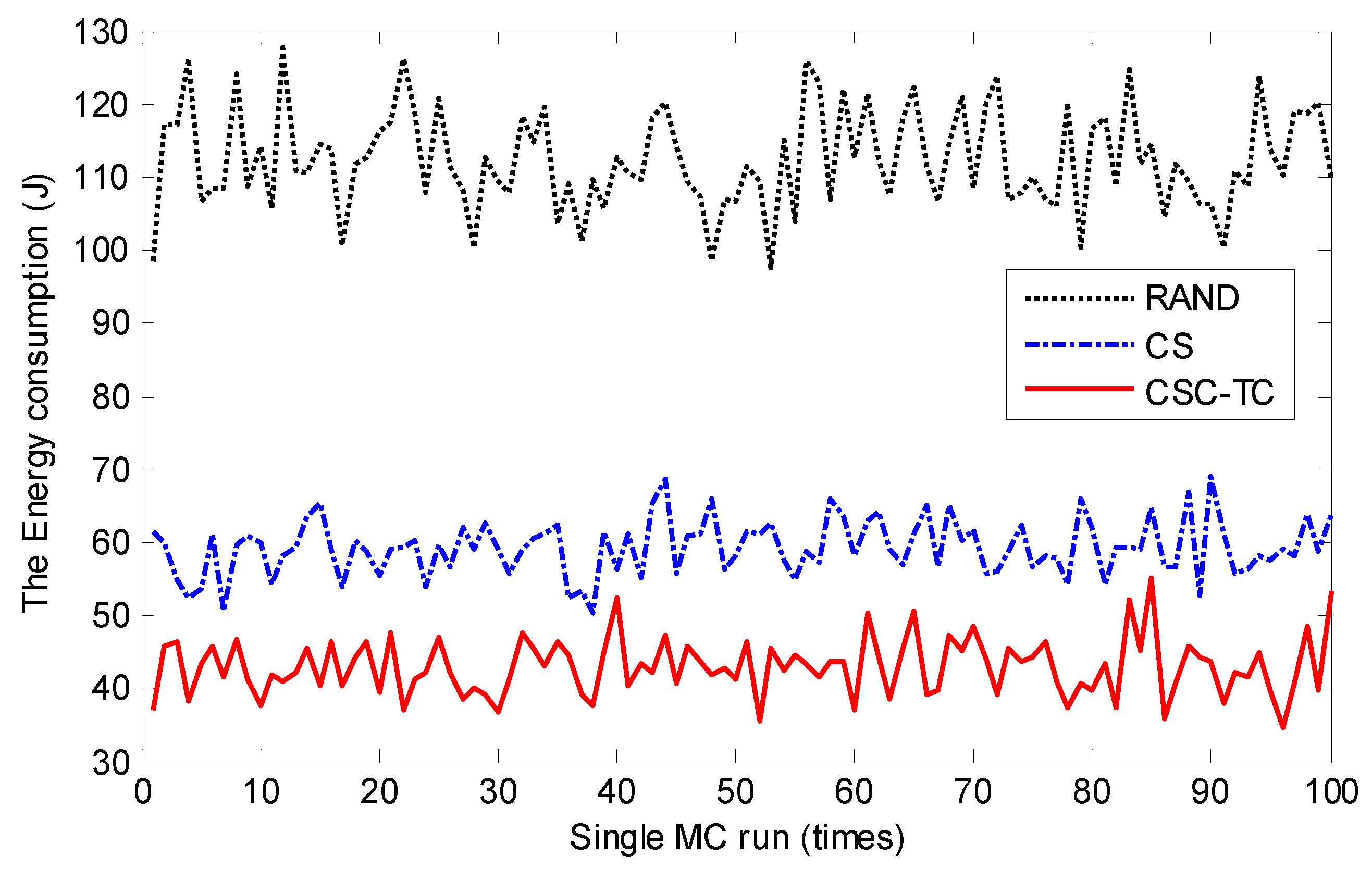
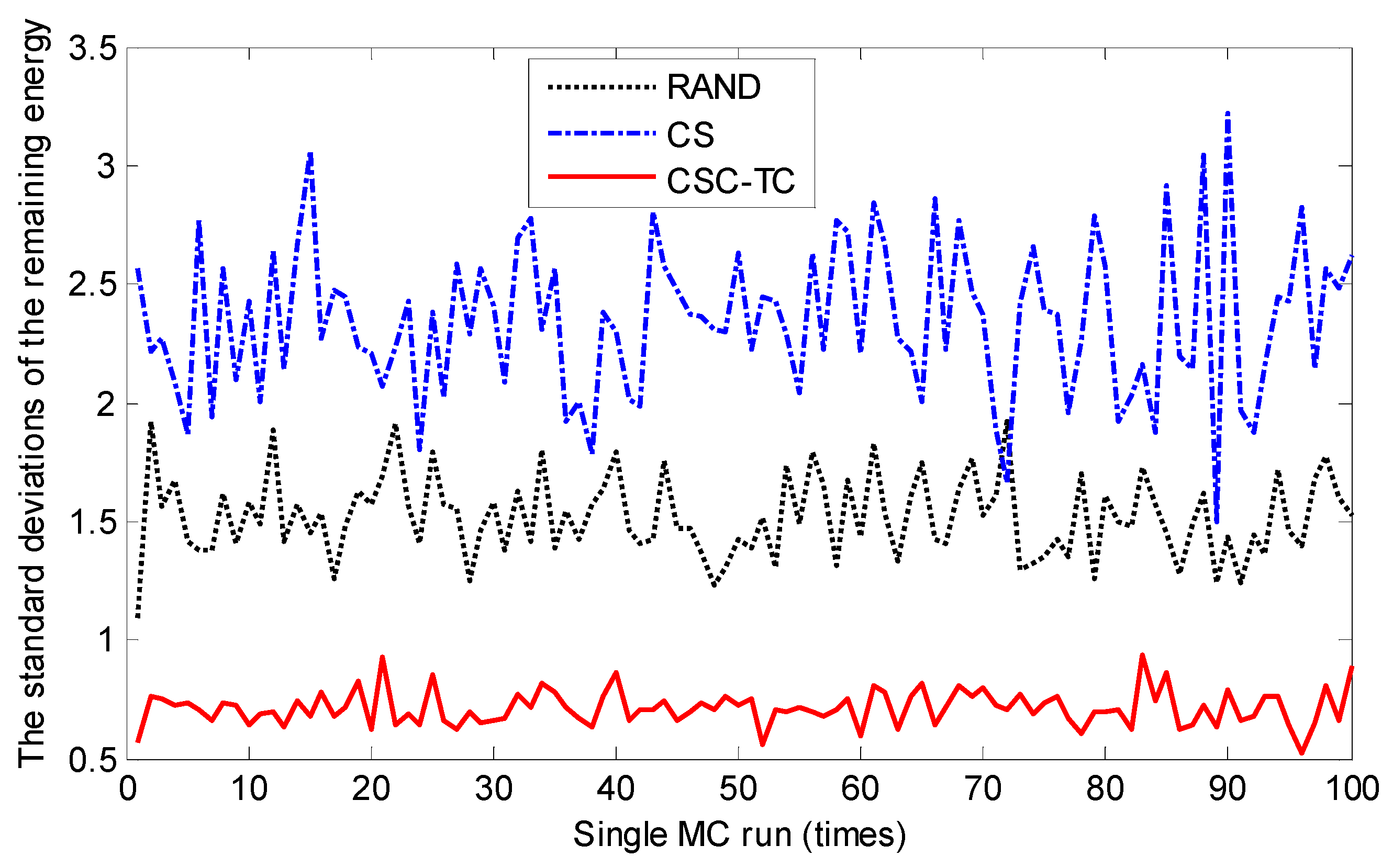
| CSC-TC | 42.9779 | 0.7146 | 12.3957 |
| CS | 59.3069 | 2.3454 | 12.3025 |
| RAND | 112.3411 | 1.5195 | 18.9313 |
| Time | Target Position | Sensor Selection * | Sensor Position |
|---|---|---|---|
| = 1 | T1: (−405, 790) | CSC-TC: {29,76,69} | CSC-TC: (181.4109, −104.5588), (−49.4442, 155.5188), (74.0502, 13.6267) |
| T2: (580, −195) | CS: {53,47,69} | CS: (−156.4971, 95.5383), (9.8250, 232.5366), (74.0502, 13.6267) | |
| T3: (−785, −585) | RAND: {41,38,57} | RAND: (−52.9732, −896.1277), (−854.8679, −216.3499), (−874.8099, −854.2625) | |
| = 20 | T1: (−500, 600) | CSC-TC: {16,20,40} | CSC-TC: (−380.7319, −154.5384), (−452.3069, −152.1786), (−512.0281, −265.9178) |
| T2: (200, −100) | CS: {19,40,29} | CS: (843.1165, −583.6014), (−512.0281, −265.9178), (181.4109, −104.5588) | |
| T3: (−500, −300) | RAND: {26,44,36} | RAND: (473.6086, −580.2009), (−175.6236, 278.7173), (−144.9029, 144.6242) | |
| = 40 | T1: (−600, 400) | CSC-TC: {78,95,37} | CSC-TC: (−727.9327, 382.1973), (−349.6038, 543.7587), (−506.9295, 421.9507) |
| T2: (−200, 0) | CS: {9,37,19} | CS: (−530.8344, 754.1318), (−506.9295, 421.9507), (843.1165, −583.6014) | |
| T3: (−200, 0) T4: (−290, 690) | RAND: {19,7,93} | RAND: (843.1165, −583.6014), (159.0102, 904.9361), (−95.4791, 248.1324) | |
| = 60 | T1: (−700, 200) | CSC-TC: {90,89,19} | CSC-TC: (930.5675, −341.4665), (539.4818, −302.1271), (843.1165, −583.6014) |
| T2: (100, 300) | CS: {18,39,19} | CS: (10.3578, 408.7489), (144.1419, 257.6447), (843.1165, −583.6014) | |
| T3: (−90, 490) T4: (780, −605) | RAND: {88,46,68} | RAND: (5.0484, −230.3810), (−917.7173, −766.5895), (51.3831, −929.3055) | |
| = 80 | T1: (400, 600) T2: (110, 290) T3: (380, −705) | CSC-TC: {66,18,39} CS: {28,48,19} RAND: {31,90,56} | CSC-TC: (313.5009, 511.3323), (10.3578, 408.7489), (144.1419, 257.6447) CS: (282.6695, −642.0494), (369.0952, −782.5874), (843.1165, −583.6014) RAND: (−673.5399, −637.0967), (930.5675, −341.4665), (748.6628, 440.7059) |
| = 100 | T1: (310, 90) T2: (−20, −805) | CSC-TC: {96,41,73} | CSC-TC: (56.6925, −704.5359), (−52.9732, −896.1277), (−100.4117, −735.8783) |
| CS: {73,52,19} | CS: (−100.4117, −735.8783), (291.4503, −43.4087), (843.1165, −583.6014) | ||
| RAND: {75,13,73} | RAND: (328.8144, −245.8045), (−283.2894, 975.5527), (−100.4117, −735.8783) |
| Solution | CSC-TC | CS | RAND |
|---|---|---|---|
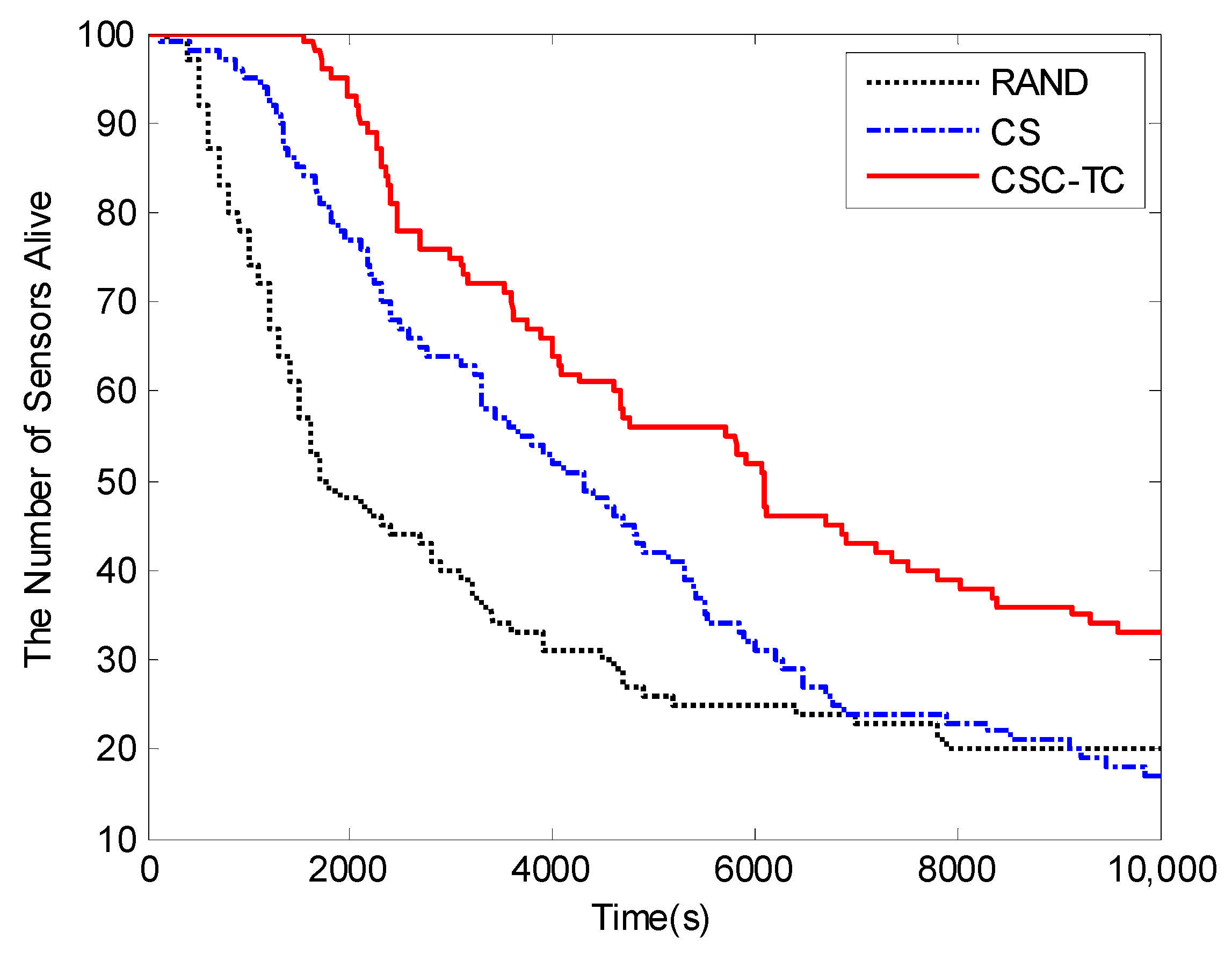
| First senor death time (s) | 1533 | 119 | 319 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, X.; Ma, T.; Jin, J.; Jiang, Y. Sensor Management with Dynamic Clustering for Bearings-Only Multi-Target Tracking via Swarm Intelligence Optimization. Electronics 2023, 12, 3397. https://doi.org/10.3390/electronics12163397
Jiang X, Ma T, Jin J, Jiang Y. Sensor Management with Dynamic Clustering for Bearings-Only Multi-Target Tracking via Swarm Intelligence Optimization. Electronics. 2023; 12(16):3397. https://doi.org/10.3390/electronics12163397
Chicago/Turabian StyleJiang, Xiaoxiao, Tianming Ma, Jie Jin, and Yujie Jiang. 2023. "Sensor Management with Dynamic Clustering for Bearings-Only Multi-Target Tracking via Swarm Intelligence Optimization" Electronics 12, no. 16: 3397. https://doi.org/10.3390/electronics12163397