

The Optimization of the Interior Permanent Magnetic Motor Case Study
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
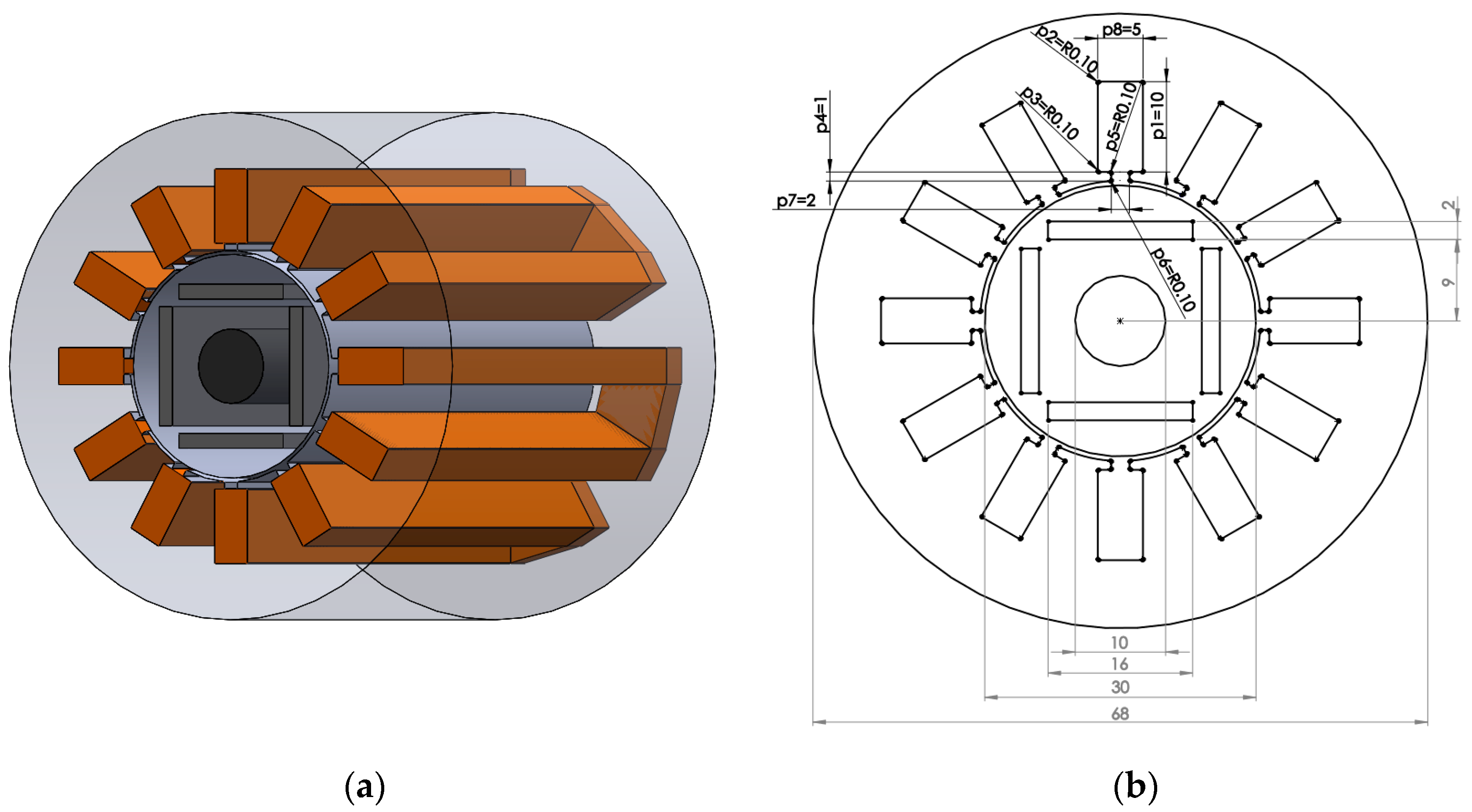
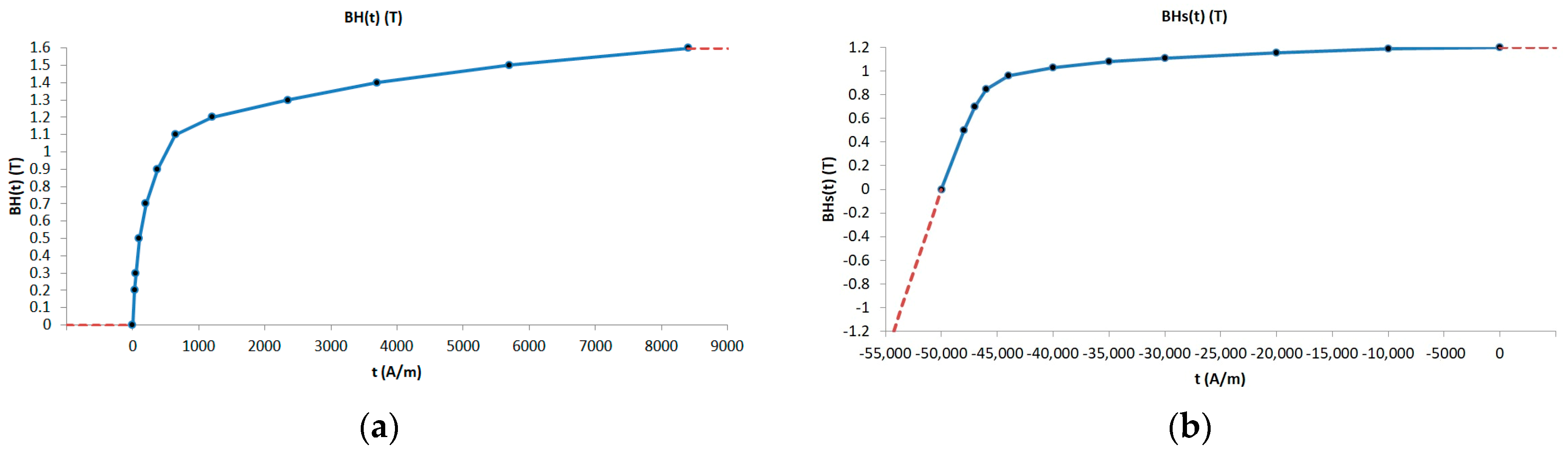
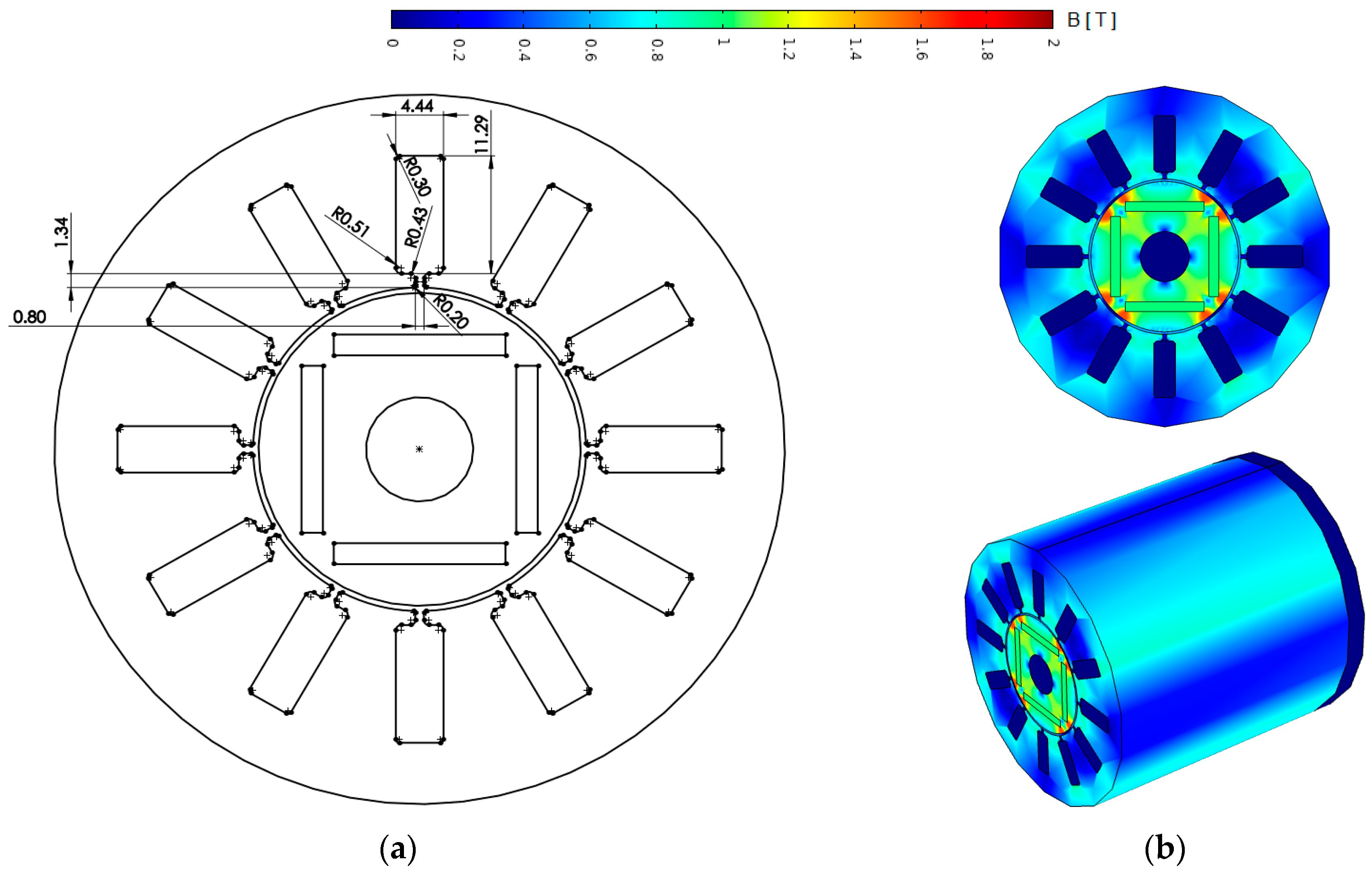
2. Materials and Methods
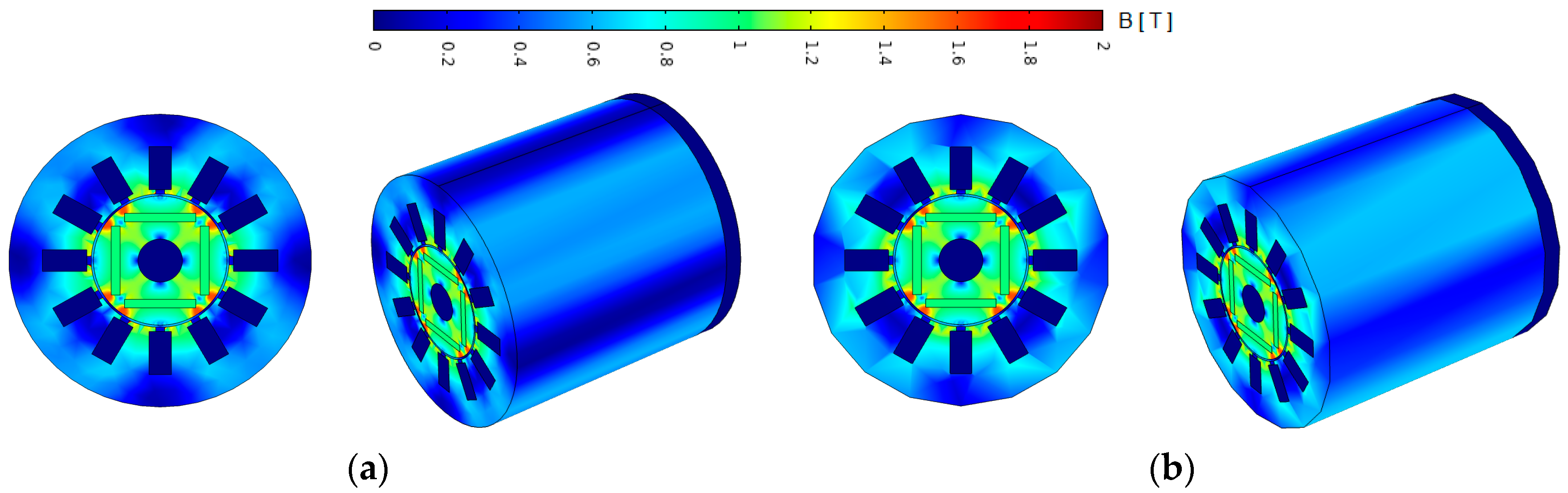
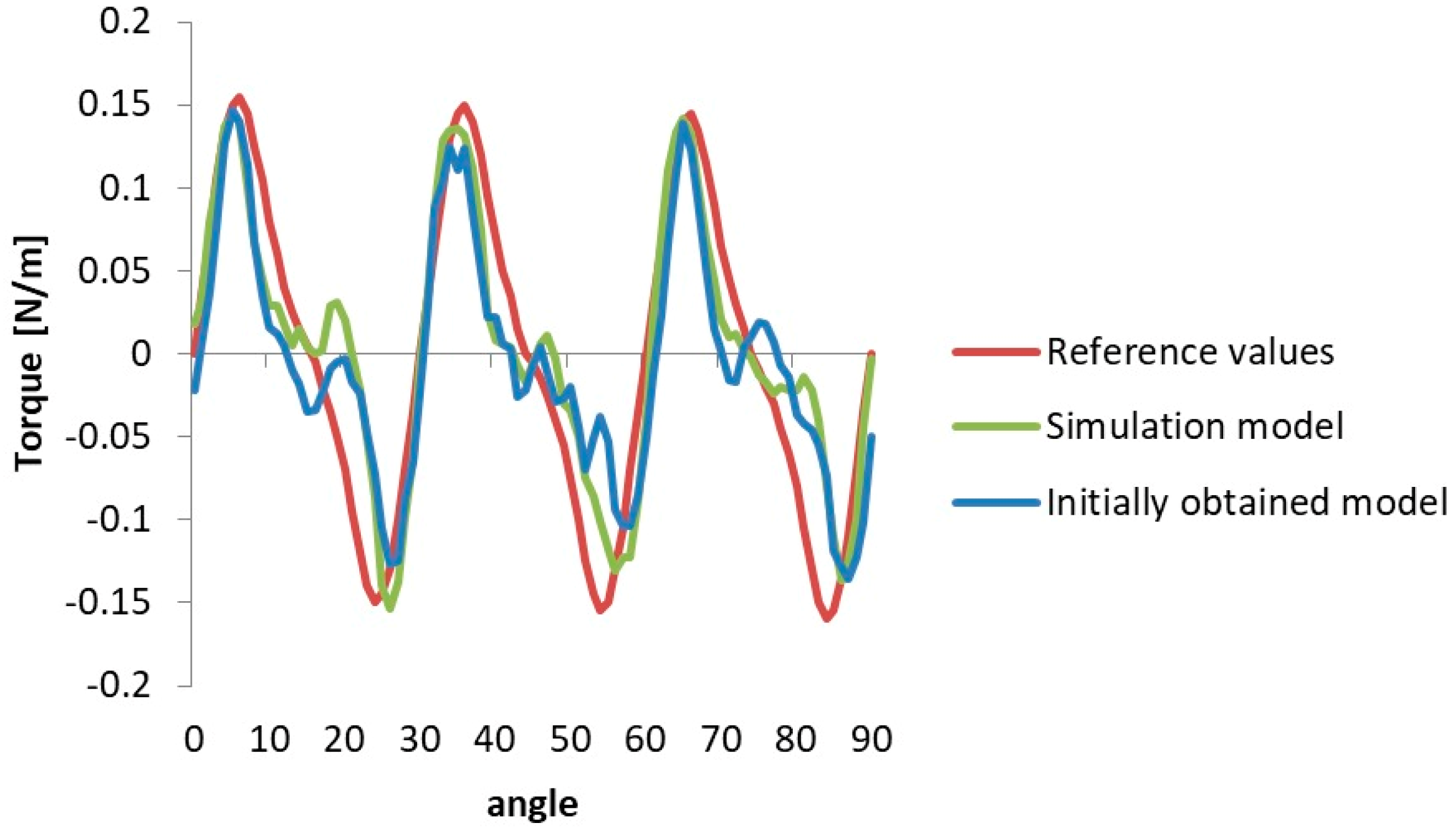
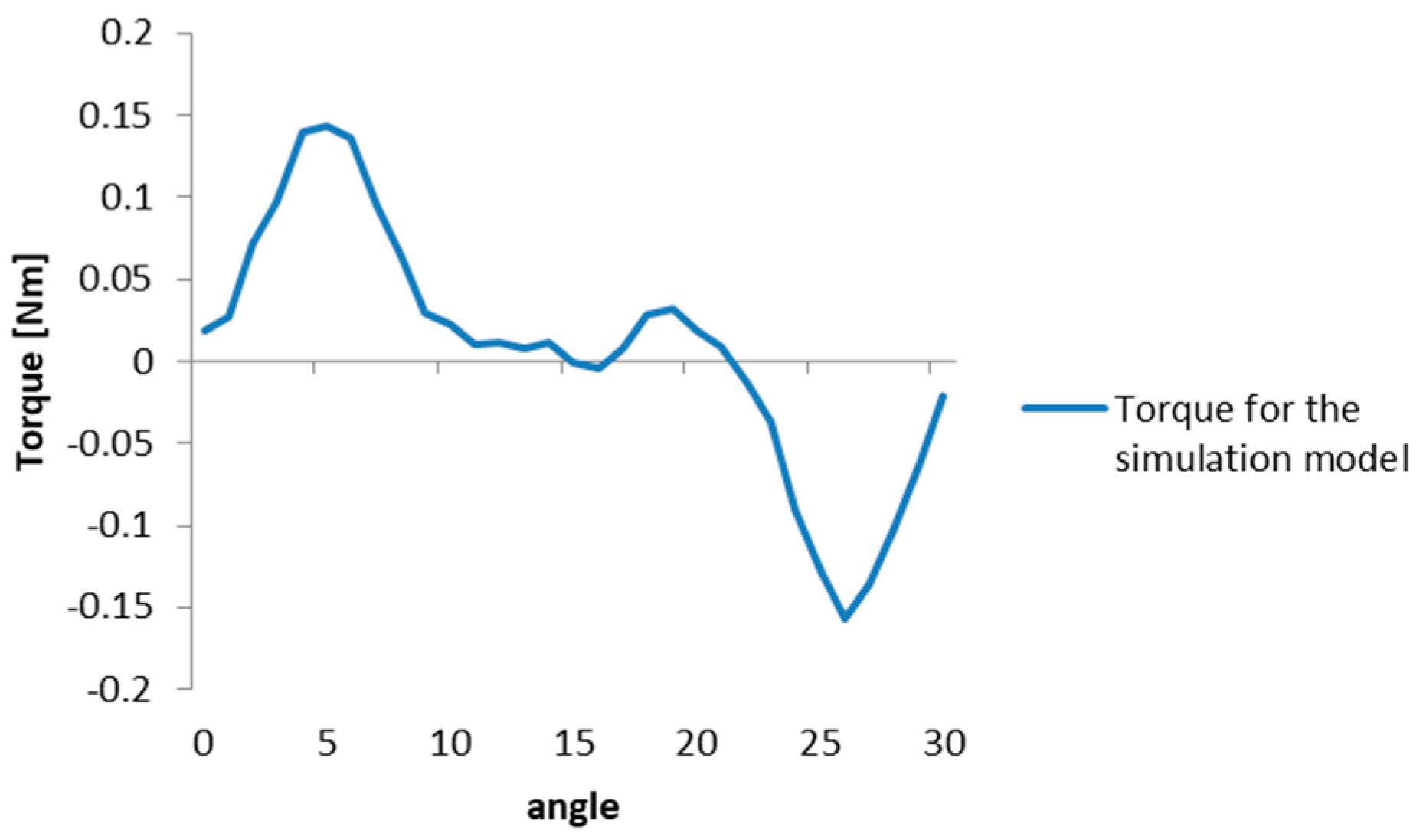
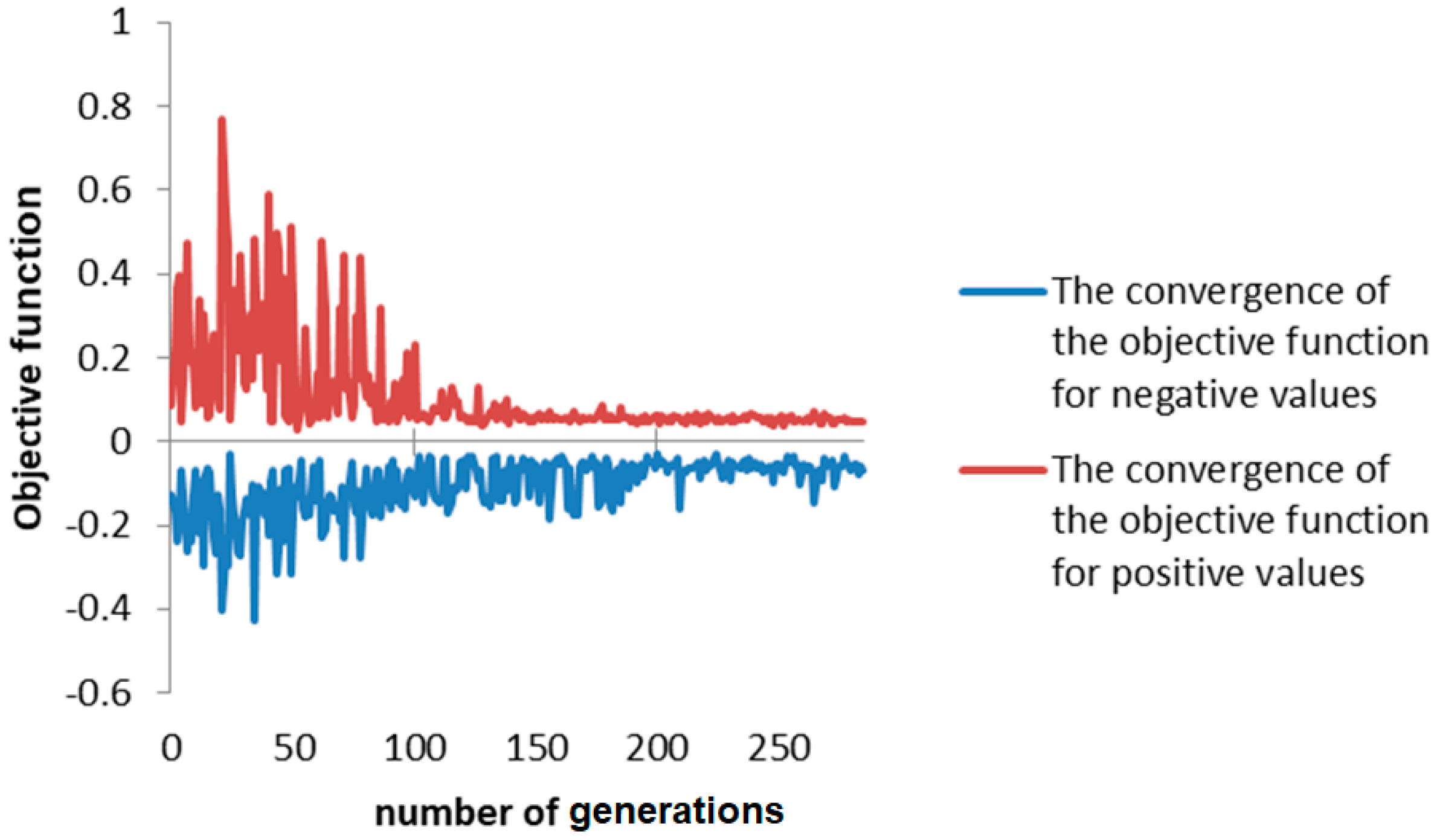
3. Results
3.1. The First Optimization
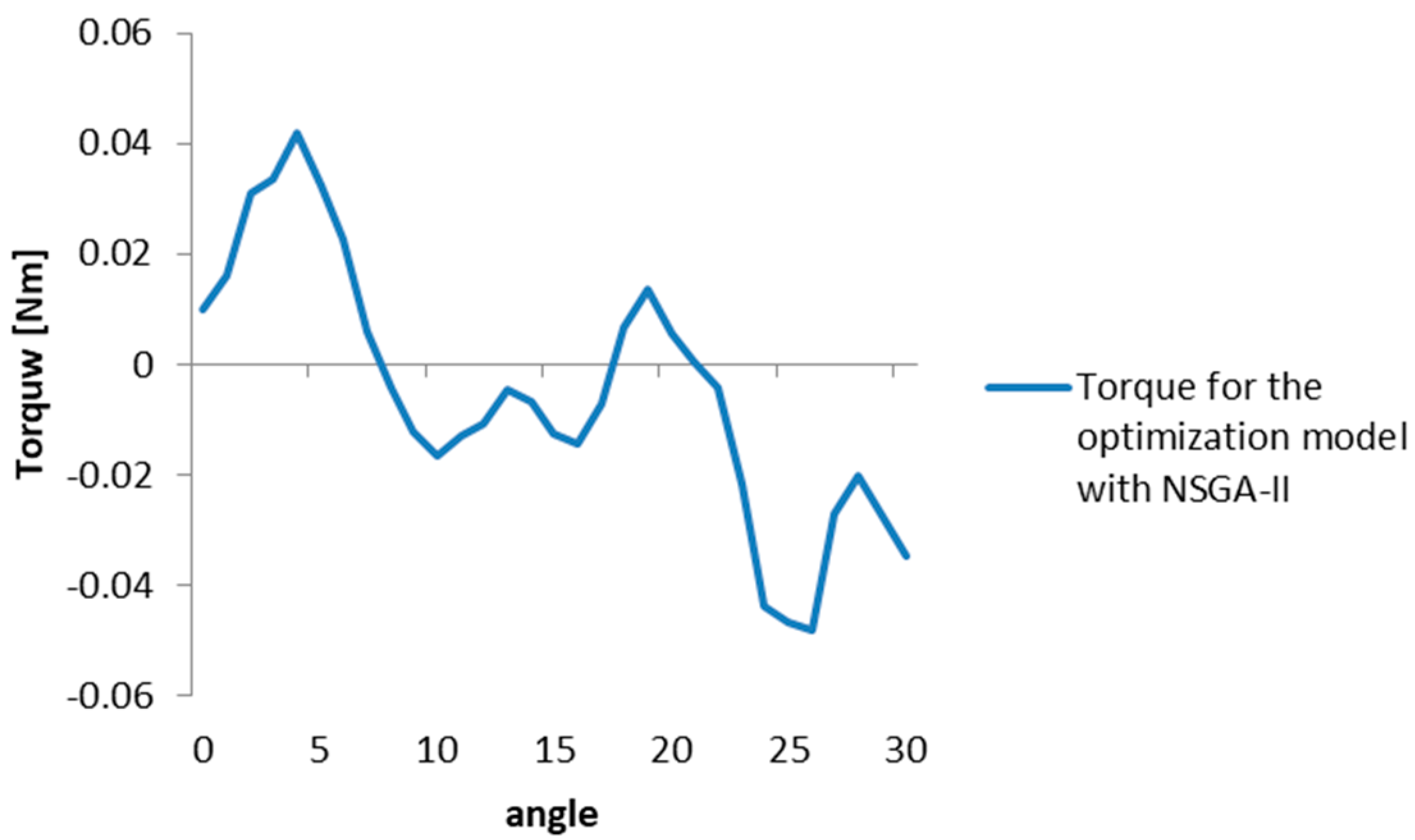
3.2. The Second Optimization
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kim, D.-H.; Park, I.-H.; Lee, J.-H.; Kim, C.-E. Optimal shape design of iron core to reduce cogging torque of IPM motor. IEEE Trans. Magn. 2003, 39, 1456–1459. [Google Scholar] [CrossRef]
- Ombach, G.; Junak, J. Torque ripple optimization of skewed IPM motor for field weakening operation. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Lee, K.-J.; Kim, K.-C.; Lee, J. Rotor optimization of interior permanent magnet synchronous motor considering mechanical stress. In Proceedings of the 2005 IEEE International Magnetics Conference (INTERMAG), Nagoya, Japan, 4–8 April 2005; pp. 717–718. [Google Scholar] [CrossRef]
- Kim, H.-S.; You, Y.-M.; Kwon, B.-I. Rotor Shape Optimization of Interior Permanent Magnet BLDC Motor according to Magnetization Direction. IEEE Trans. Magn. 2013, 49, 2193–2196. [Google Scholar] [CrossRef]
- Fang, L.; Kim, S.-I.; Kwon, S.-O.; Hong, J.-P. Novel Double-Barrier Rotor Designs in Interior-PM Motor for Reducing Torque Pulsation. IEEE Trans. Magn. 2010, 46, 2183–2186. [Google Scholar] [CrossRef]
- Chong, L.; Dutta, R.; Rahman, M.F. Application of concentrated windings in interior permanent magnet machine. In Proceedings of the 2007 Australasian Universities Power Engineering Conference, Perth, Australia, 9–12 December 2007; pp. 1–5. [Google Scholar] [CrossRef]
- Chong, L.; Dutta, R.; Rahman, M.F. Parameter analysis of an IPM machine with fractional-slot concentrated windings, part I: Open-circuit analysis. In Proceedings of the 2008 Australasian Universities Power Engineering Conference, Sydney, Australia, 14–17 December 2008; pp. 1–5. [Google Scholar]
- Choi, J.S.; Izui, K.; Nishiwaki, S.; Kawamoto, A.; Nomura, T. Topology Optimization of the Stator for Minimizing Cogging Torque of IPM Motors. IEEE Trans. Magn. 2011, 47, 3024–3027. [Google Scholar] [CrossRef]
- Devillers, E.; Hecquet, M.; Devillers, E.; Le Besnerais, J. A new hybrid method for the fast computation of airgap flux and magnetic forces in IPMSM. In Proceedings of the 2017 Twelfth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 11–13 April 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Sizov, G.Y.; Ionel, D.M.; Demerdash, N. Modeling and design optimization of PM AC machines using computationally efficient—Finite element analysis. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 578–585. [Google Scholar] [CrossRef]
- Sizov, G.Y.; Ionel, D.M.; Demerdash, N. Multi-objective optimization of PM AC machines using computationally efficient—FEA and differential evolution. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 1528–1533. [Google Scholar] [CrossRef]
- Chuenban, A.; Jantanan, M.; Chayopitak, N.; Pupadubsin, R.; Kongprawechnon, W. Multi-Objective Optimization with Two-Stage Design Approach of IPM Motors for Compressor Applications. In Proceedings of the 2022 19th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Prachuap Khiri Khan, Thailand, 24–27 May 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Geng, W.; Wang, J.; Li, L.; Guo, J. Design and Multiobjective Optimization of a New Flux-Concentrating Rotor Combining Halbach PM Array and Spoke-Type IPM Machine. IEEE/ASME Trans. Mechatron. 2023, 28, 257–266. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhu, Z.Q.; Jewell, G.W.; Chen, J.T.; Wu, D.; Gong, L.M. A Novel Asymmetric Interior Permanent Magnet Synchronous Machine. IEEE Trans. Ind. Appl. 2022, 58, 3370–3382. [Google Scholar] [CrossRef]
- Ren, W.; Xu, Q.; Li, Q. Asymmetrical V-Shape Rotor Configuration of an Interior Permanent Magnet Machine for Improving Torque Characteristics. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Li, S.; Tong, W.; Hou, M.; Wu, S.; Tang, R. Analytical Model for No-Load Electromagnetic Performance Prediction of V-Shape IPM Motors Considering Nonlinearity of Magnetic Bridges. IEEE Trans. Energy Convers. 2022, 37, 901–911. [Google Scholar] [CrossRef]
- Barba, P.D.; Mognaschi, M.E.; Wiak, S. A Method for Solving Many-Objective Optimization Problems in Magnetics. In Proceedings of the 2019 19th International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering (ISEF), Nancy, France, 29–31 August 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Dassi, F.; Barba, P.D.; Russo, A. Virtual element method and permanent magnet simulations: Potential and mixed formulations. IET Sci. Meas. Technol. 2020, 14, 1098–1104. [Google Scholar] [CrossRef]
- Sun, X.; Xu, N.; Yao, M. Sequential Subspace Optimization Design of a Dual Three-Phase Permanent Magnet Synchronous Hub Motor Based on NSGA III. IEEE Trans. Transp. Electrif. 2023, 9, 622–630. [Google Scholar] [CrossRef]
- Mociran, B.; Oglejan, R. Methods of Interconnecting Designing Programs Simulation and Optimization in Engineering. In Proceedings of the 2018 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 18–19 October 2018; pp. 475–478. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Ibrahim, A.; Rahnamayan, S.; Martin, M.V.; Deb, K. EliteNSGA-III: An improved evolutionary many-objective optimization algorithm. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 973–982. [Google Scholar] [CrossRef]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mociran, B.; Topa, V. The Optimization of the Interior Permanent Magnetic Motor Case Study. Electronics 2023, 12, 2982. https://doi.org/10.3390/electronics12132982
Mociran B, Topa V. The Optimization of the Interior Permanent Magnetic Motor Case Study. Electronics. 2023; 12(13):2982. https://doi.org/10.3390/electronics12132982
Chicago/Turabian StyleMociran, Bogdan, and Vasile Topa. 2023. "The Optimization of the Interior Permanent Magnetic Motor Case Study" Electronics 12, no. 13: 2982. https://doi.org/10.3390/electronics12132982