

Multi-Objective Real-Time Optimal Energy Management Strategy Considering Energy Efficiency and Flexible Torque Response for a Dual-Motor Four-Drive Powertrain
Abstract
:1. Introduction
1.1. Literature Review
1.2. Motivation and Contribution
- First, a quantitative analysis of energy loss is performed to determine the direction of energy efficiency improvement for a single-motor electric powertrain. The theoretical operating efficiency of different powertrains is investigated to reveal the energy-saving mechanisms and control challenges of the dual-motor four-drive powertrain.
- Second, to improve overall energy efficiency and motor output stability, an ANLPSO is proposed to enhance the optimization performance of PSO by improving the initialization process, inertial weight updating formula, and learning mechanism. In addition, optimization freezing tolerance constraints are introduced to resolve the issue of actual motor response and the balance between optimization performance and real-time performance for the first time, which is crucial to the online implementation of the real-time optimal power distribution for two motors.
- Finally, to enhance the dynamic performance and ride comfort during gear shifting, a pre-shifting recognition mechanism based on the two-parameter shifting schedule and rear-motor response capacity is devised to predict shifting time and realize torque coordination control before shifting. A gradient torque recovery strategy based on different gears and the impact limit of humans is further developed to achieve smooth torque recovery for two motors after shifting. Moreover, the smooth switching process is designed to accomplish real-time optimal energy management and seamless torque transition.
1.3. Outline
2. Vehicle Powertrain Description and Modeling
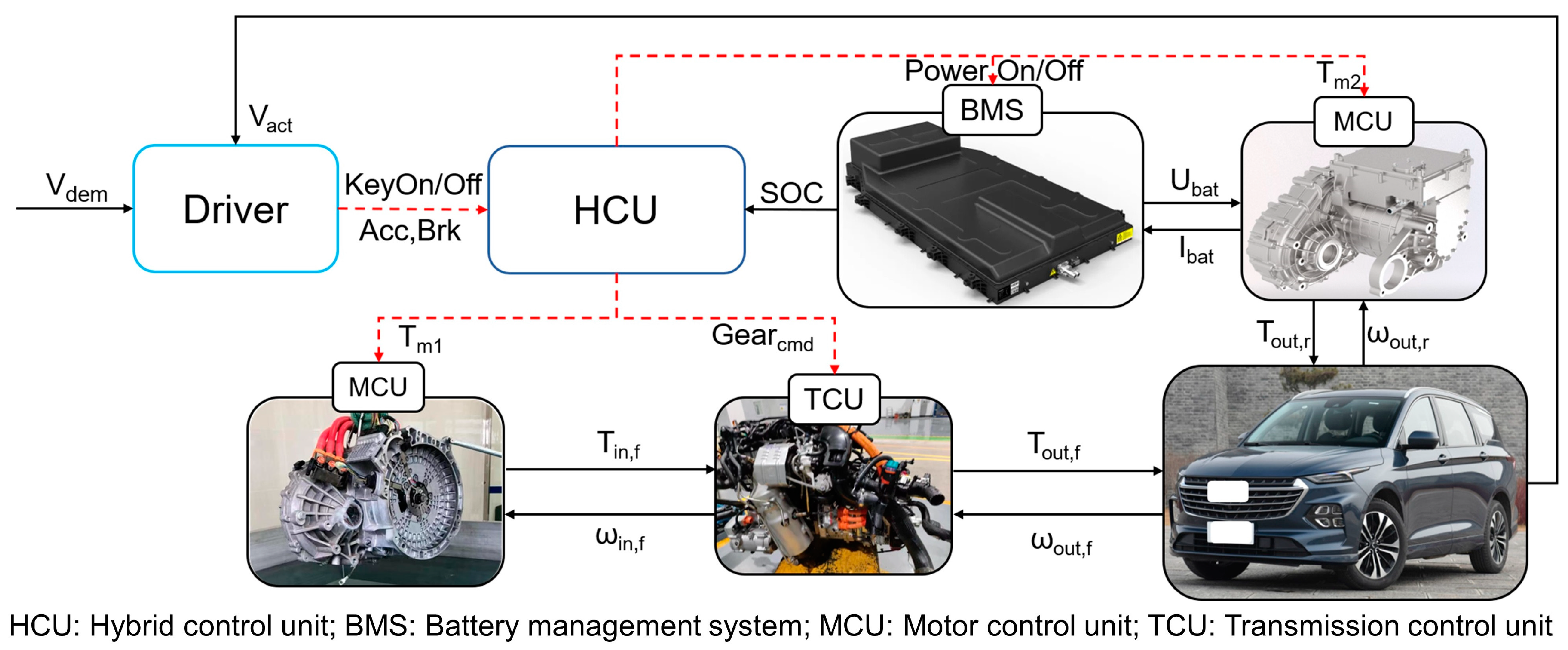
2.1. Powertrain Configuration
2.2. Vehicle Modeling
- (1)
- Driver model
- (2)
- Motor model
- (3)
- Battery model
- (4)
- Transmission model
- (5)
- Longitudinal vehicle dynamics model
3. Energy-Saving Mechanism Analysis
3.1. Energy Loss Analysis of Pure Electric Powertrain
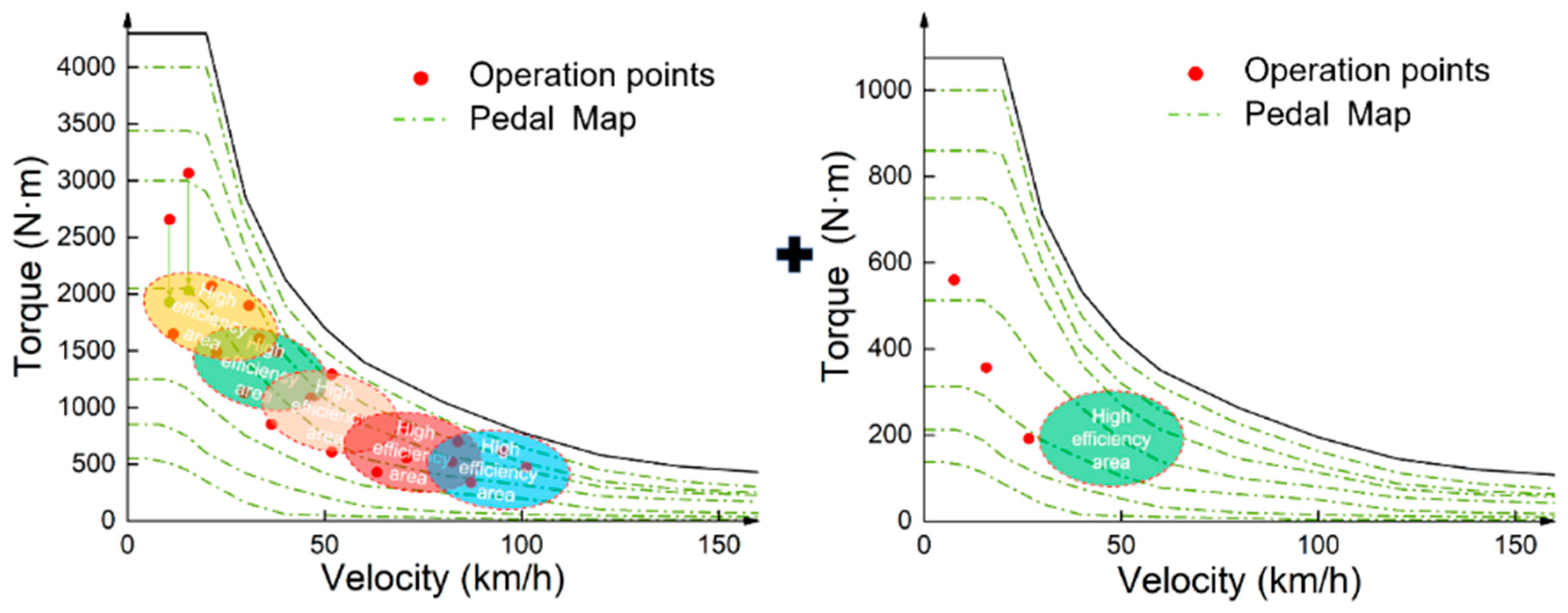
3.2. Theoretical Operation Characteristics Analysis of Different Powertrains
4. Multi-Objective Real-Time Optimal Energy Management Strategy
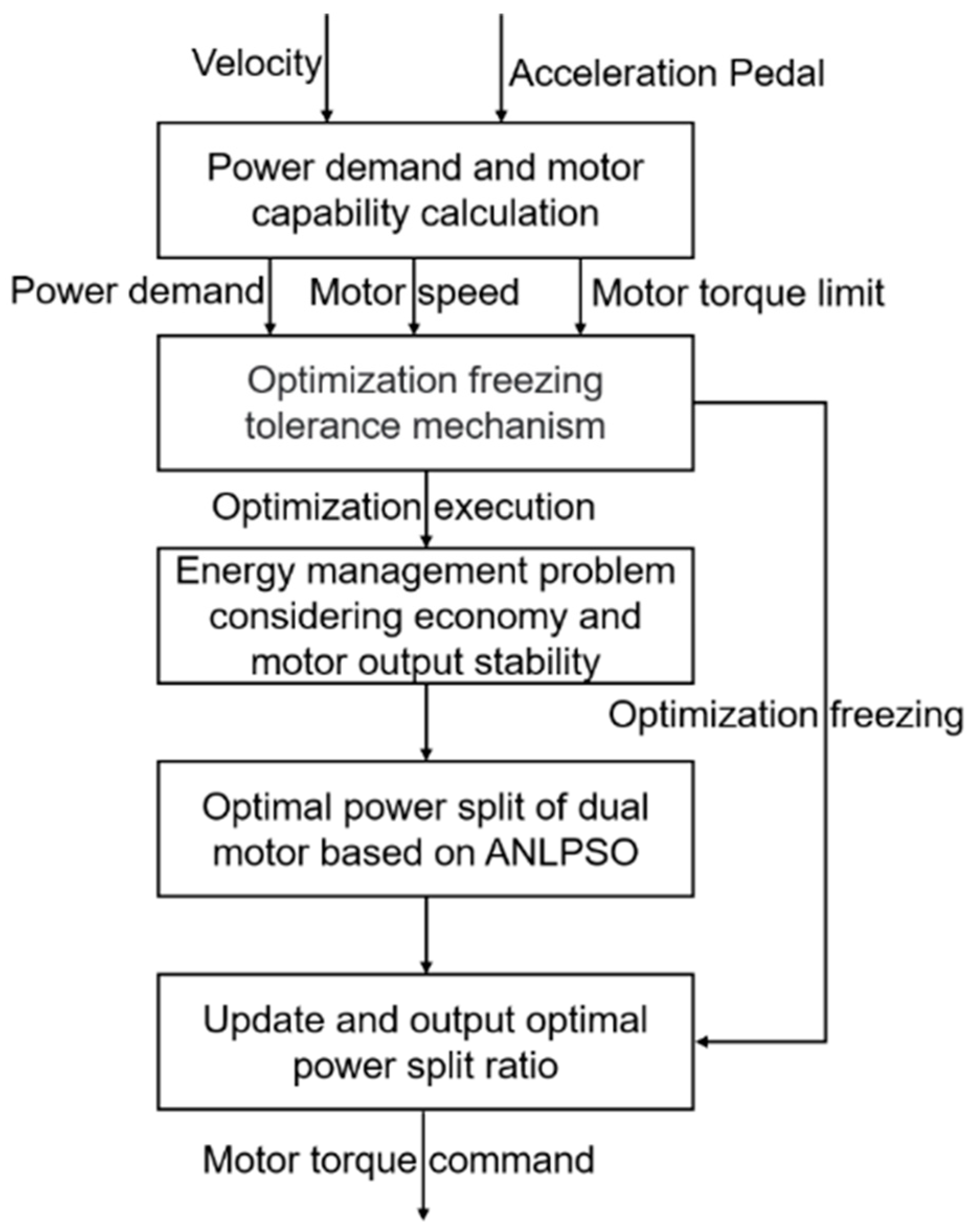
4.1. Economic Energy Management Strategy Based on ANLPSO and Optimization Freezing Tolerance Mechanism
- (I)
- Multi-objective energy management optimization problem
- (II)
- Optimal power split strategy based on ANLPSO
- (1)
- Adaptive initialization. To avoid local concentration, the initial position of particles is generated according to Equation (26). The position of each particle represents :where is the position of the ith particle, n is the population size, and are lower and upper boundaries of , respectively, and r is a random number between 0 and 1.
- (2)
- Update inertia weight. At the beginning of the optimization process, a large inertia weight is assigned to accelerate convergence. In the final optimization phase, a small inertia weight is advantageous for enhancing solution quality. Hence, the inertia weight is calculated using the nonlinear decline formula:where and are lower and upper boundaries of inertia weight, respectively, and are the current and maximum iterations, respectively.
- (3)
- Update learning factors. Particles whose fitness value is lower than the average value can obtain larger and smaller to improve global search ability; otherwise, particles can obtain smaller and larger to enhance solution quality:where and are individual and global learning factors, respectively, and are lower and upper boundaries of , respectively, and and are minimum and average fitness values, respectively.
- (4)
- Fitness value calculation. The fitness value is calculated based on the power split ratio that each particle position represents:
- (5)
- Update pBesti and gBest. Each particle should choose the optimal individual value pBesti according to its own experience. Then the particle with the largest fitness value is chosen as the global optimal value gBest.
- (6)
- Update velocity and position. The velocity and position of the particles are updated as follows:
- (7)
- Stopping rule. Steps (2)–(6) are repeated until the optimal power split ratio is obtained.
- (III)
- Economic strategy design based on optimization freezing tolerance mechanism
4.2. Dynamic Energy Management Strategy Based on Pre-Shifting Recognition and Gradient Torque Recovery
- (1)
- Pre-shifting recognition mechanism
- (2)
- Gradient torque recovery strategy
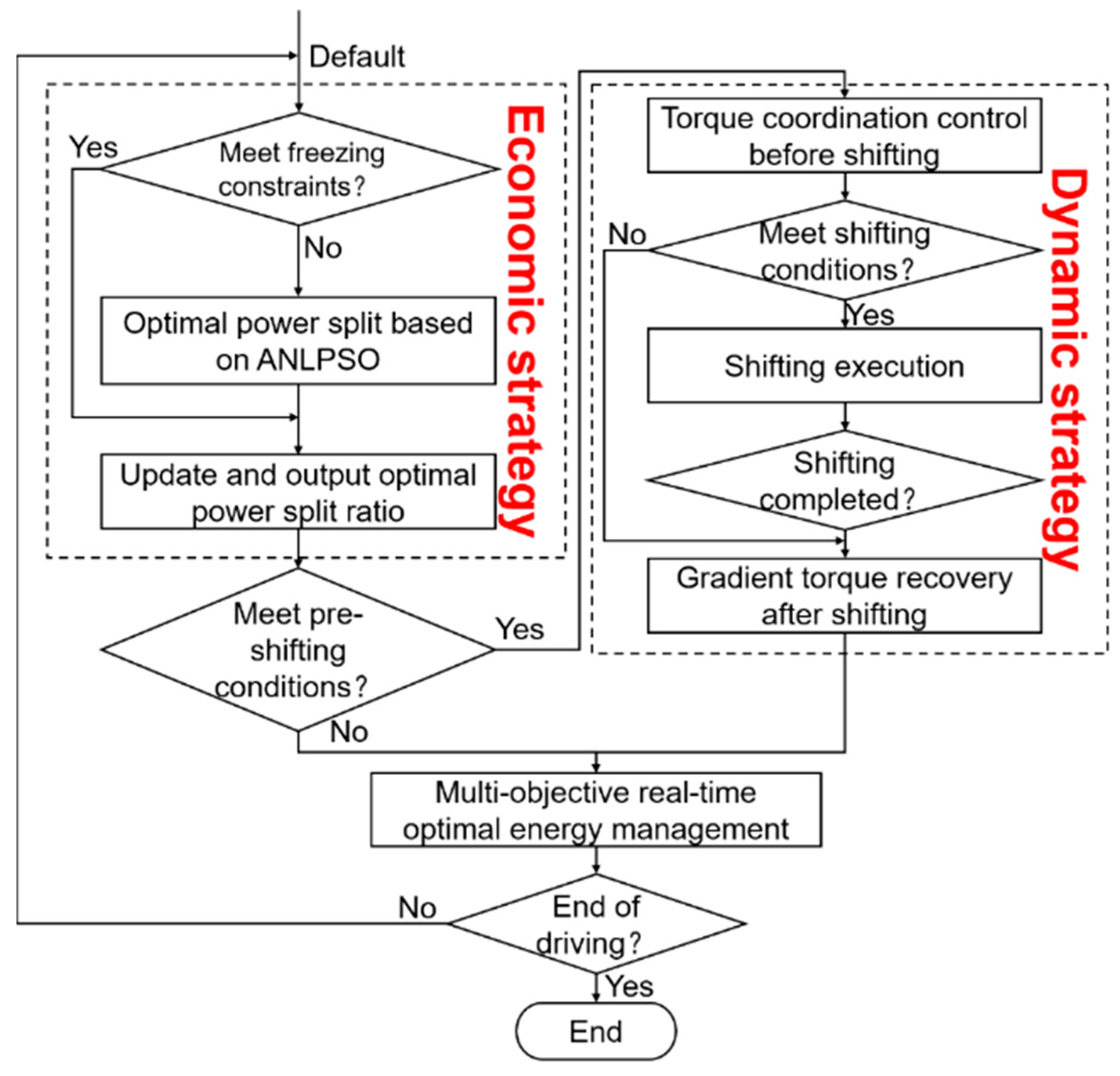
4.3. Smooth Switching Logic between Two Strategies
- (1)
- The default strategy is the economic strategy. The strategy determines whether optimization should be frozen based on speed and power demand. If freezing conditions are not met, the ANLPSO is performed to solve the power split ratio. Otherwise, the optimal power split ratio of the last optimization is output directly.
- (2)
- If the conditions for pre-shifting are met, the dynamic strategy is implemented to gradually transfer the torque from the front motor to the rear motor. The strategy then proceeds to Step 3. Otherwise, the output power of two motors is determined by the optimal power split ratio in Step 1.
- (3)
- Determine whether the conditions for shifting are met. If the conditions are satisfied, shifting will occur. Then, according to the torque recovery gradient strategy, the torque of two motors is recovered based on the optimal power split ratio after shifting. If not, the torque of the two motors will be recovered to its initial value before shifting.
- (4)
- Determine if the driving cycle is over. If not, repeat Steps 1–3.
5. Simulation and Discussion
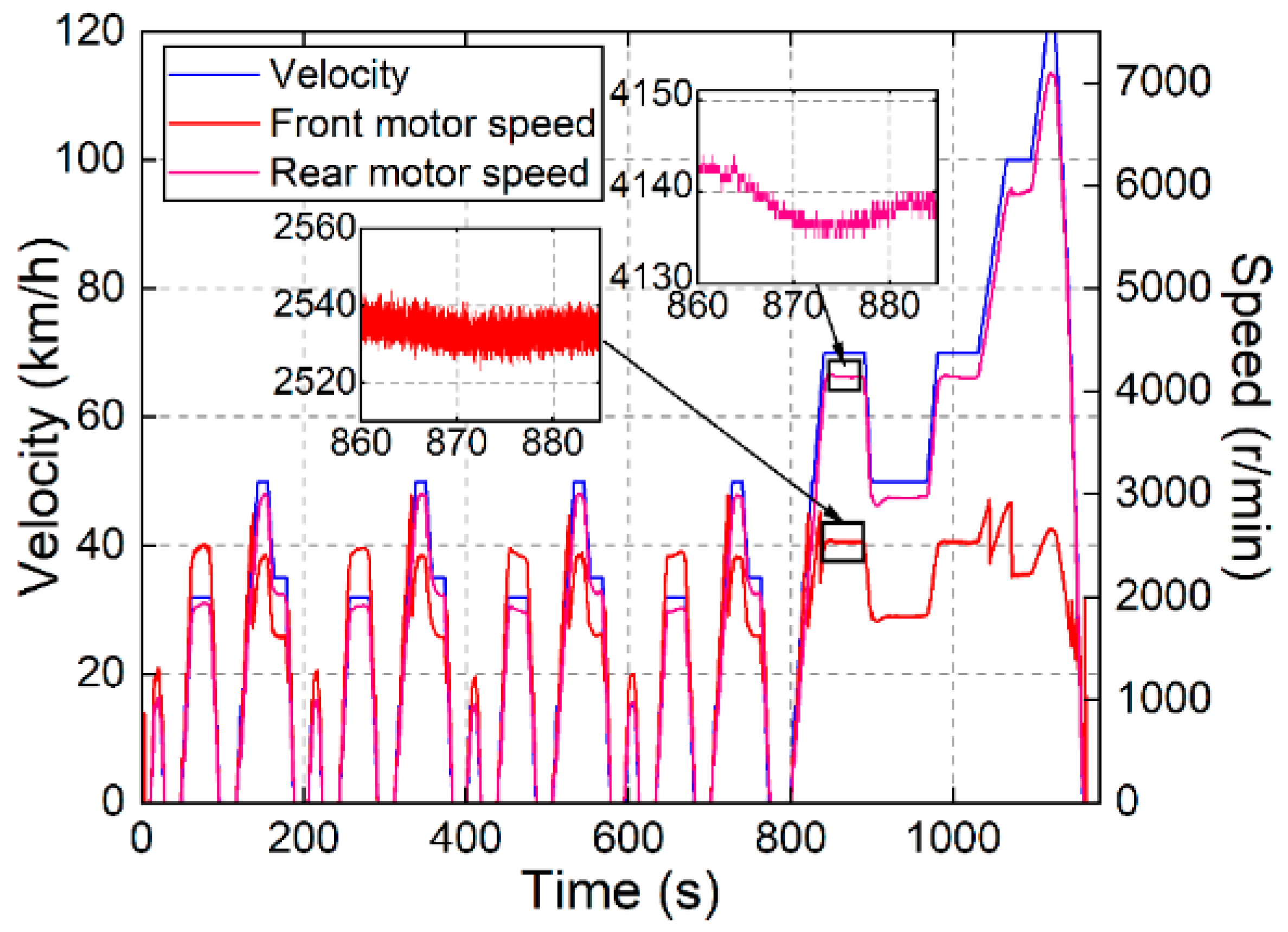
5.1. Simulation Results of Economic Energy Management Strategy
5.2. Simulation Results of Dynamic Energy Management Strategy
6. Actual Vehicle Experiment
6.1. Experimental Process Introduction
6.2. Experimental Results Analysis
7. Conclusions
- (1)
- The quantitative analysis of energy loss and theoretical operation characteristics analysis of different powertrains indicate that the dual-motor four-drive powertrain has significant energy-saving advantages over the single-motor powertrain in terms of configuration.
- (2)
- From the perspective of improving energy efficiency, an economic strategy based on ANLPSO and the freezing tolerance mechanism was designed to achieve optimal power distribution of two motors and reduce the frequent fluctuation of power split ratio. To realize flexible torque response, a dynamic strategy based on the pre-shifting recognition mechanism and gradient torque recovery strategy was proposed. Besides, smooth switching logic was created to guarantee a seamless transition between the two strategies.
- (3)
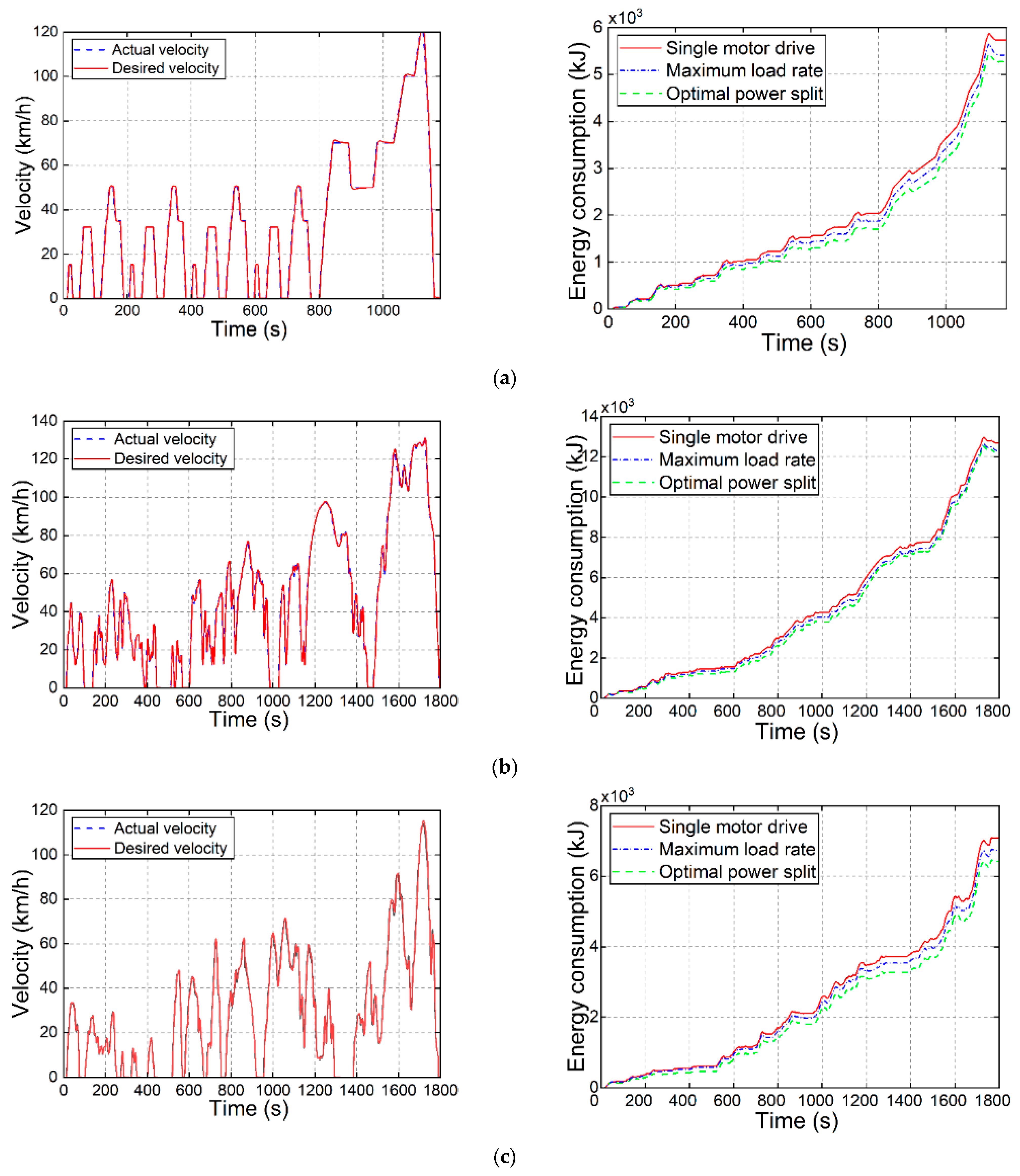
- Simulation results of the standard driving cycle indicate that the setting of a 1% freezing tolerance constraint can greatly reduce the fluctuation of power split ratio and computation time, with a slight sacrifice in energy efficiency. Compared with the single-motor drive strategy and maximum load rate strategy, the proposed strategy can reduce energy consumption by 8.1% and 2.49%, 4.02% and 0.92%, and 9.49% and 2.43% under NEDC, WLTC, and CLTC, respectively.
- (4)
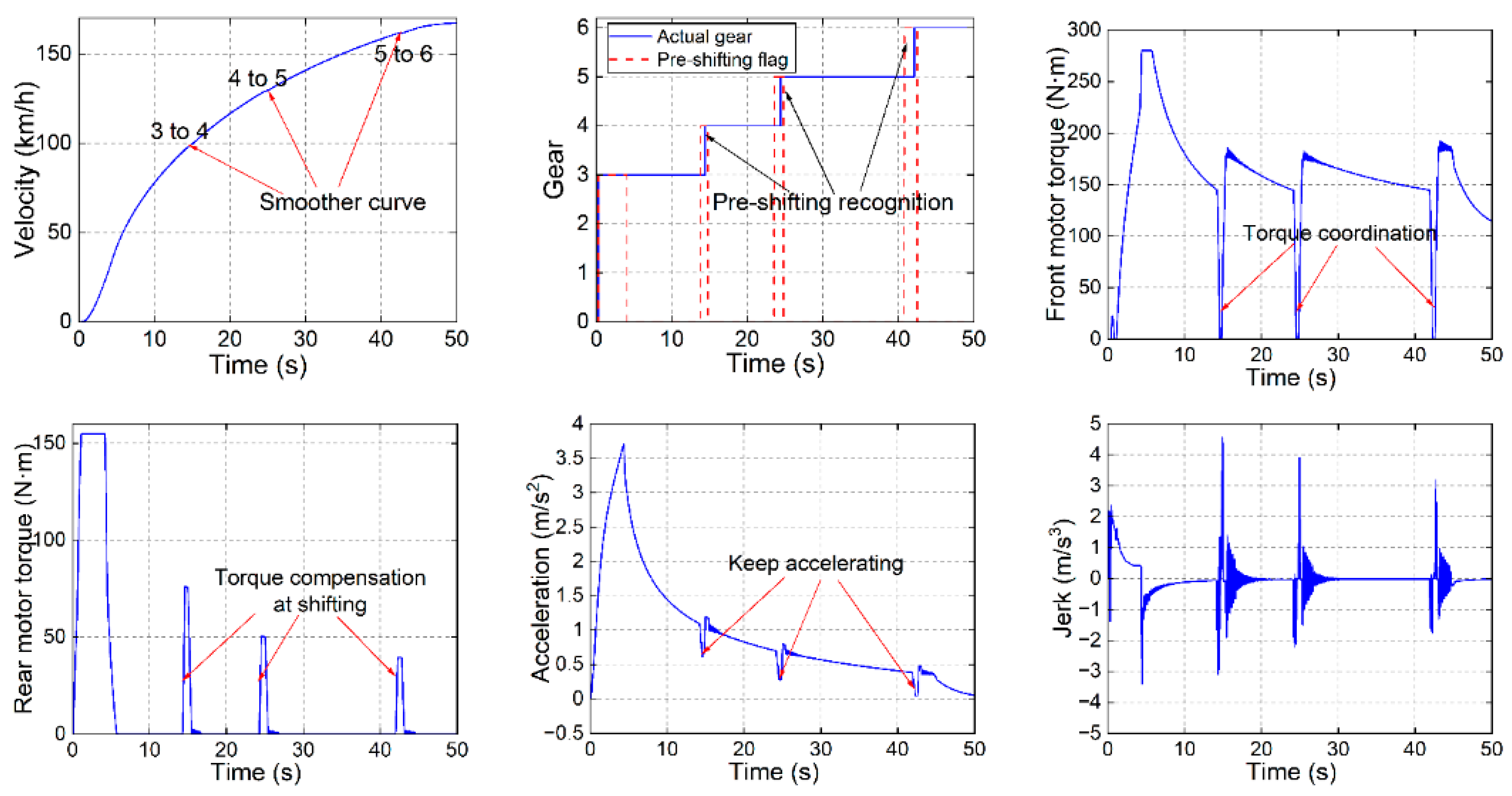
- Simulation results of the full load acceleration demonstrate that compared with the original strategy, the proposed strategy can improve the longitudinal acceleration from −0.21 m/s2 to 0.65 m/s2, from −0.29 m/s2 to 0.28 m/s2, and from −0.4 m/s2 to 0.04 m/s2, and the maximum jerk can be reduced from 13.03 m/s3 to 4.57 m/s3, from 9.9 m/s3 to 3.92 m/s3, and from 7.86 m/s3 to 3.18 m/s3, in the shifting processes of 3 to 4, 4 to 5, and 5 to 6, respectively, thereby enhancing the vehicle’s dynamic performance and ride comfort.
- (5)
- The experimental results confirm that compared with the single-motor drive strategy, the multi-objective real-time optimal strategy can effectively improve energy efficiency by 8.74% and 4.88% under NEDC and WLTC, respectively, as well as provide excellent dynamic performance and comfort.
- (6)
- In the future, with the rapid development of V2I and V2V, long-term prediction of the driving cycle and traffic environment will be possible. Thus, a more intelligent energy management framework considering velocity planning and optimal shifting will be the focus of our research work.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| SOC | state of charge |
| DP | dynamic programming |
| MPC | model predictive control |
| PSO | particle swarm optimization |
| HCU | hybrid control unit |
| PID | proportion integration differentiation |
References
- Rayavarapu, S.S.; Rajasekar, N. Energy management techniques and topologies suitable for hybrid energy storage system powered electric vehicles: An overview. Int. Trans. Electr. Energy Syst. 2021, 31, e12819. [Google Scholar]
- Tran, D.-D.; Vafaeipour, M.; El Baghdadi, M.; Barrero, R.; Van Mierlo, J.; Hegazy, O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: Topologies and integrated energy management strategies. Renew. Sustain. Energy Rev. 2020, 119, 109596. [Google Scholar] [CrossRef]
- Zhao, F.; Liu, X.; Zhang, H.; Liu, Z. Automobile Industry under China’s Carbon Peaking and Carbon Neutrality Goals: Challenges, Opportunities, and Coping Strategies. J. Adv. Transp. 2022, 2022, 5834707. [Google Scholar] [CrossRef]
- Sheldon, T.L.; Deshazo, J.R.; Carson, R.T. Electric and Plug-in Hybrid Vehicle Demand: Lessons for an Emerging Market. Econ. Inq. 2017, 55, 695–713. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R.; Zhang, C.; Sun, F. An optimal structure selection and parameter design approach for a dual-motor-driven system used in an electric bus. Energy 2016, 96, 437–448. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, Y.H.; Li, H.M.; Gao, J.W.; Swen, A.; Wen, G.L. Optimal sizing and energy management of a novel dual-motor powertrain for electric vehicles. Energy 2023, 275,, 127315. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, X.; Langari, R.; Wang, L.; Cui, Y.; Pang, H. Adaptive energy management in automated hybrid electric vehicles with flexible torque request. Energy 2021, 214, 118873. [Google Scholar] [CrossRef]
- Tie, S.F.; Tan, C.W. A review of energy sources and energy management system in electric vehicles. Renew. Sustain. Energy Rev. 2013, 20, 82–102. [Google Scholar] [CrossRef]
- Wang, Z.Z.; Zhou, J.; Rizzoni, G. A review of architectures and control strategies of dual-motor coupling powertrain systems for battery electric vehicles. Renew. Sustain. Energy Rev. 2022, 162, 112455. [Google Scholar] [CrossRef]
- Wisdom, E.; Chris, B. Modeling, and control of hybrid electric vehicles (A comprehensive review). Renew. Sustain. Energy Rev. 2017, 74, 1433–1442. [Google Scholar]
- Hao, J.N.; Ruan, S.M.; Wang, W. Model Predictive Control Based Energy Management Strategy of Series Hybrid Electric Vehicles Considering Driving Pattern Recognition. Electronics 2023, 12, 1418. [Google Scholar] [CrossRef]
- Ruan, J.G.; Song, Q. A Novel Dual-Motor Two-Speed Direct Drive Battery Electric Vehicle Drivetrain. IEEE Access 2019, 7, 54330–54342. [Google Scholar] [CrossRef]
- Hu, J.; Zheng, L.; Jia, M.; Zhang, Y.; Pang, T. Optimization and Model Validation of Operation Control Strategies for a Novel Dual-Motor Coupling-Propulsion Pure Electric Vehicle. Energies 2018, 11, 754. [Google Scholar] [CrossRef] [Green Version]
- Vinoth, K.B.; Avirajama, P. Dual Motor Power Management Strategy for Plug-in Hybrid Electric Vehicle. In Proceedings of the International Conference on Power Electronics and Renewable Energy Systems, Tamilnadu, India, 21–29 April 2021; Volume 795, pp. 491–498. [Google Scholar]
- Hou, X.Y. Research on Control Strategy of Dual Motor Driving System Based on Driving Cycle Recognition. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2019. [Google Scholar]
- Duan, B.M.; Wang, Q.N.; Wang, J.N.; Li, X.N.; Ba, T. Calibration efficiency improvement of rule-based energy management system for a plug-in hybrid electric vehicle. Int. J. Automot. Technol. 2017, 18, 335–344. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R. Adaptive energy management of a plug-in hybrid electric vehicle based on driving pattern recognition and dynamic programming. Appl. Energy 2015, 155, 68–78. [Google Scholar] [CrossRef]
- Lim, H.; Su, W. Hierarchical Energy Management for Power-Split Plug-In HEVs Using Distance-Based Optimized Speed and SOC Profiles. IEEE Trans. Veh. Technol. 2018, 67, 9312–9323. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, C.N.; Han, G.W.; Wang, Q.H. Optimal Control Strategy Design Based on Dynamic Programming for a Dual-Motor Coupling-Propulsion System. Sci. World J. 2014, 2014, 958329. [Google Scholar] [CrossRef] [Green Version]
- Wu, B.; Zhang, S.X. Energy Management Strategy for Dual-Motor Two-Speed Transmission Electric Vehicles Based on Dynamic Programming Algorithm Optimization. SAE Int. J. Electrified Veh. 2021, 10, 19–31. [Google Scholar] [CrossRef]
- Xie, S.; Liu, T.; Li, H.; Wei, L. Optimization on Power Distribution Strategy for a Dual-motor Integrated Battery Electric Bus. Automot. Eng. 2018, 40, 749–756. [Google Scholar]
- Fu, J.; Song, S.; Fu, Z.; Ma, J. Real-time implementation of optimal control considering gear shifting and engine starting for parallel hybrid electric vehicle based on dynamic programming. Optim. Control Appl. Methods 2018, 39, 757–773. [Google Scholar] [CrossRef]
- Asher, Z.D.; Trinko, D.A.; Payne, J.D.; Geller, B.M.; Bradley, T.H. Real-Time Implementation of Optimal Energy Management in Hybrid Electric Vehicles: Globally Optimal Control of Acceleration Events. J. Dyn. Syst. Meas. Control Trans. ASME 2020, 142, 081002. [Google Scholar] [CrossRef]
- Zhao, M.; Shi, J.; Lin, C. Energy management strategy design for dual-motor coaxial coupling propulsion electric city-buses. Energy Procedia 2018, 152, 568–573. [Google Scholar] [CrossRef]
- Hu, J.J.; Niu, X.Y.; Jiang, X.Y.; Zu, G.Q. Energy management strategy based on driving pattern recognition for a dual-motor battery electric vehicle. Int. J. Energy Res. 2019, 43, 3346–3364. [Google Scholar] [CrossRef]
- Zhang, C.N.; Zhang, S.; Han, G.W.; Liu, H.P. Power Management Comparison for a Dual-Motor-Propulsion System Used in a Battery Electric Bus. IEEE Trans. Ind. Electron. 2017, 64, 3873–3882. [Google Scholar] [CrossRef]
- He, H.W.; Han, M.; Liu, W.; Cao, J.F.; Shi, M.; Zhou, N. MPC-based longitudinal control strategy considering energy consumption for a dual-motor electric vehicle. Energy 2022, 253, 124004. [Google Scholar] [CrossRef]
- Lin, C.; Zhao, M.J.; Pan, H.; Shao, S. Energy management for a dual-motor coupling propulsion electric bus based on model predictive control. Energy Procedia 2019, 158, 2744–2749. [Google Scholar] [CrossRef]
- Yang, Y.P.; Shih, Y.C.; Chen, J.M. Real-time torque-distribution strategy for a pure electric vehicle with multiple traction motors by particle swarm optimization. IET Electr. Syst. Transp. 2016, 6, 76–87. [Google Scholar] [CrossRef]
- Shangguan, J.Y.; Li, H.; Fang, C.; Yue, M. Robust Torque Split Ratio Design Method for Rule-based Control Strategy of Dual-Motor Drive Electric Buses. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence, Tianjin, China, 29–31 October 2021. [Google Scholar]
- Zhang, F.Q.; Xi, J.Q.; Reza, L. Real-Time Energy Management Strategy Based on velocity forecasts Using V2V and V2I Communications. IEEE Trans. Intell. Transp. Syst. 2015, 18, 416–430. [Google Scholar] [CrossRef]
- Shen, P.H.; Zhao, Z.G.; Zhan, X.W.; Li, J.W. Particle Swarm Optimization of Driving Torque Demand Decision Based on Fuel Economy for Plug-In Hybrid Electric Vehicle. Energy 2017, 123, 89–107. [Google Scholar] [CrossRef]
- Lu, J.X.; Lin, C.T.; Chen, Q.S. Comparison Study of 3 Types of Battery Models for Electrical Vehicle. Chin. J. Power Sources 2006, 30, 535–538. [Google Scholar]
- Ramadan, H.S.; Bendary, A.F.; Nagy, S. Particle swarm optimization algorithm for capacitor allocation problem in distribution systems with wind turbine generators. Int. J. Electr. Power Energy Syst. 2017, 84, 143–152. [Google Scholar] [CrossRef]
- Zheng, Q.X.; Tian, S.P.; Zhang, Q. Optimal Torque Split Strategy of Dual-Motor Electric Vehicle Using Adaptive Nonlinear Particle Swarm Optimization. Math. Probl. Eng. 2020, 2020, 1204260. [Google Scholar] [CrossRef]
- Gao, S.; Sun, B.B.; Wang, P.W.; Li, J.W.; Li, Y.Q. An Experimental Analysis on Mode-Switch Jerk of Front and Rear Motor Drive Electric Vehicle. Automot. Eng. 2017, 39, 561–568. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| Vehicle mass m | 1943 | kg |
| Radius of wheels rw | 0.342 | m |
| Frontal area Af | 2.659 | m2 |
| Rolling resistance coefficient Cr | 0.01 | - |
| Air resistance coefficient Cd | 0.379 | - |
| Rotary mass coefficient δ | 1.12 | - |
| Gear ratio of transmission ig | [17.477, 9.917, 6.133, 4.689, 3.743, 2.858] | - |
| Final drive ratio (rear axle) if,r | 7.7 | - |
| Peak power of the front motor Pm1,max | 105.4 | kW |
| Peak torque of the front motor Tm1,max | 309 | Nm |
| Peak speed of the front motor ωm1,max | 7000 | r/min |
| Peak power of the rear motor Pm2,max | 45 | kW |
| Peak torque of the rear motor Tm2,max | 170 | Nm |
| Peak speed of the rear motor ωm2,max | 11,000 | r/min |
| Type of power battery | NMC | - |
| Nominal voltage of battery module | 350 | V |
| Nominal capacity of battery module | 37 | Ah |
| Connection approach of battery module | 1S6P | - |
| Driving Cycle | Tolerance (%) | Power Split Ratio Fluctuation | Computation Time (s) | Energy Consumption (kWh/100 km) |
|---|---|---|---|---|
| NEDC | 0 | Big | 804.77 | 13.26 |
| 1 | Small | 120.57 | 13.27 | |
| 2 | Small | 81.29 | 13.45 |
| Driving Cycle | Strategy | Computation Time (s) | Energy Consumption (kWh/100 km) | Improvement (%) |
|---|---|---|---|---|
| NEDC | Single-motor drive | 47.43 | 14.44 | - |
| Maximum load rate | 71.10 | 13.63 | 5.61 | |
| Optimal power split | 120.57 | 13.27 | 8.10 | |
| WLTC | Single-motor drive | 86.18 | 15.18 | - |
| Maximum load rate | 141.71 | 14.71 | 3.10 | |
| Optimal power split | 249.46 | 14.57 | 4.02 | |
| CLTC | Single-motor drive | 81.31 | 13.59 | - |
| Maximum load rate | 128.33 | 12.93 | 7.06 | |
| Optimal power split | 224.87 | 12.30 | 9.49 |
| Strategy | Gear | Max Acceleration (m/s2) | Max Jerk (m/s3) |
|---|---|---|---|
| Single-motor drive | 3 to 4 | −0.21 | 13.03 |
| 4 to 5 | −0.29 | 9.90 | |
| 5 to 6 | −0.40 | 7.86 | |
| Dynamic strategy | 3 to 4 | 0.65 | 4.57 |
| 4 to 5 | 0.28 | 3.92 | |
| 5 to 6 | 0.04 | 3.18 |
| Parameter | Value |
|---|---|
| Pressure (kPa) | 100.06 |
| Ambient temperature (°C) | 23.75 |
| Relative humidity (%) | 49.60 |
| Drag coefficient setting | A: 154.396; B: 0.093; C: 0.0418 |
| Chassis dynamometer type | ROADSIM48 MIN42 LIGHT |
| Driving Cycle | Strategy | Energy Consumption (kJ) | Energy Consumption (kWh/100 km) | Improvement (%) |
|---|---|---|---|---|
| NEDC | Single-motor drive | 5815.64 | 14.65 | - |
| Optimal power split | 5305.51 | 13.37 | 8.74 | |
| WLTC | Single-motor drive | 12,831.33 | 15.36 | - |
| Optimal power split | 12,196.84 | 14.61 | 4.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Q.; Tian, S. Multi-Objective Real-Time Optimal Energy Management Strategy Considering Energy Efficiency and Flexible Torque Response for a Dual-Motor Four-Drive Powertrain. Electronics 2023, 12, 2903. https://doi.org/10.3390/electronics12132903
Zheng Q, Tian S. Multi-Objective Real-Time Optimal Energy Management Strategy Considering Energy Efficiency and Flexible Torque Response for a Dual-Motor Four-Drive Powertrain. Electronics. 2023; 12(13):2903. https://doi.org/10.3390/electronics12132903
Chicago/Turabian StyleZheng, Qingxing, and Shaopeng Tian. 2023. "Multi-Objective Real-Time Optimal Energy Management Strategy Considering Energy Efficiency and Flexible Torque Response for a Dual-Motor Four-Drive Powertrain" Electronics 12, no. 13: 2903. https://doi.org/10.3390/electronics12132903