1. Introduction
Educational robotics (ER) represents a category of cyber-physical systems that can be considered the social counterpart of Industry 4.0 advancements, specifically within education, encompassing interactions between individuals engaged in the learning process (i.e., students/learners and instructors). It is an exciting and rapidly growing field that involves the use of robots to teach students about science, technology, engineering, and mathematics (STEM) concepts. These robots can take many forms, ranging from simple programmable toys to more complex machines capable of performing advanced tasks.
One of the key advantages of using robots in education is that they provide a hands-on and interactive way for students to learn about STEM subjects. Rather than simply reading about these concepts in a textbook or listening to a lecture, following Seymour Papert’s Paradigm [
1,
2,
3], students can see and manipulate real-world examples of these principles in action. This can help make these topics more engaging and interesting for students, which can, in turn, lead to higher academic motivation and, therefore, to improved learning outcomes [
4]. As children’s neurophysiological and mental development progresses, their cognition expands through nuanced interactions with agents, including both people (classmates) and robots [
5].
Another advantage of ER is that it helps prepare students for the modern workforce. As technology advances at an unprecedented rate, many jobs are becoming increasingly automated, and there is a growing demand for workers who can design, program, and work with robots. By giving students experience with robots and robotics technology, educational institutions can help ensure that they are well-prepared for future jobs.
ER programs can be implemented in various settings, from elementary schools to universities. Many schools and educational institutions have already begun incorporating robotics into their curriculum, and there are many dedicated robotics programs and competitions for students to participate in.
One popular example of an ER program is For Inspiration and Recognition of Science Technology (FIRST) Robotics (
https://www.firstinspires.org/, accessed on 19 June 2023) [
6], which is a global organization that hosts annual robotics competitions for students of all ages. These competitions involve teams of students designing, building, and programming robots to compete in various challenges, and they provide an exciting and engaging way for students to learn about robotics and STEM concepts.
Another example of an ER program is LEGO Education (
https://education.lego.com, accessed on 19 June 2023) [
7], which offers various robotics kits and curriculum resources for students of all ages. These kits include programmable robots that can be controlled using various software platforms, and they provide a fun and engaging way for students to learn about coding, robotics, and other STEM topics, like Physics and Maths.
The field of ER is rapidly expanding and has the potential to significantly impact the way various subjects are taught [
8]. In response to a growing demand for ER in consumer electronics, companies such as LEGO, Robolink, Hanson Robotics, and Engino have emerged and are designing their products based on the needs and preferences of their consumers. Extensive research in this field has led to the development of various robotic platforms over the past decade, each focusing on specific educational goals and unique features to engage students. Establishing the intended learning outcomes for each platform will ensure its effectiveness in the educational context and provide a clear understanding of what skills and knowledge students will gain through their interaction with the robotics platform [
9].
In addition to the desired learning outcomes, it is also crucial to consider the methodology that instructors and students will use during their interaction with the ER platform. The programming or guidance of the robot and the activities that will be completed are key factors that product designers take into account during the initial stages of development. It is also important for designers to consider the robot’s morphology, as this can impact its usability and effectiveness in the educational context [
10]. Will the robot platform exhibit anthropomorphic traits, resembling a humanoid form, or will it be designed primarily for utilitarian purposes, more akin to a traditional machine? Is it intended to have a bipedal or wheeled locomotion system, or is it being designed with an alternative method of mobility? Will the robotic platform be designed with its own personality, exhibiting a degree of autonomous decision making, or will it be programmed to solely respond to questions without engaging in further decision-making processes?
As robots gain popularity, understanding students’ perceptions of them is crucial for guiding the development of educational robots. The widespread concern that robots will take over human jobs or even control humanity has raised questions about how this fear affects children and adolescents and, consequently, the future development of robots. For immediate concerns, comprehending students’ perception of robots [
11] is vital for successfully integrating robots in classrooms since they are the learners who will take advantage of ER in their learning experience. Previous studies have shown that robots with different appearances and functions received varying levels of acceptance from children. For instance, robotic platforms with unconventional shapes incorporating differentiated body parts are more likely to be rejected than those with more conventional morphologies [
12]. Therefore, it is essential to understand how students perceive robots so that corresponding instructional strategies can be utilized to engage them in learning.By investigating how a robotic platform that acts as a learning assistant for students will be more acceptable to them, we will provide insights into their attitudes and preferences. This will allow the design and implementation of the platform to be tailored, which can improve student engagement and maximize learning outcomes.
Over the years, research has focused on people’s expectations regarding robots, their attitudes, needs, and preferences regarding robot appearance and interaction modalities [
13]. Regarding the students’ perspectives, they seem to have favorable impressions of robots and are open to having them in their classrooms. While in the previous decades, students’ responses suggested potentially unrealistic expectations of the robots’ capabilities and a preference for robots with cartoon or animal-like appearances [
14], more recent findings suggest that there exists a correlation between the depictions of robots in children’s drawings and their beliefs regarding the robots’ capacities [
15].
How humans, in general, and students, in particular, perceive robots shares similarities with the social phenomena observed in how humans perceive other individuals. Demographic or educational background is quite likely to have an impact on people’s perception of robots. A more engineering background, for example, will lead to a more positive attitude and acceptance toward robots rather than a more theoretical background [
16]. Cultural effects and prior exposure to robots through multiple channels, such as mass media and Information and Communication Technologies (ICT), significantly shape and modulate individuals’ perceptions of robots. These cultural influences and prior encounters play a substantial role in shaping the cognitive, emotional, and attitudinal responses people have toward robotic entities [
17,
18,
19,
20].
2. Purpose and Methodology
This study examines the existing literature on ER, specifically focusing on the advancements in new platforms and the importance of their morphology and design. Through this investigation, we aim to develop a comprehensive questionnaire that will enable us to understand the needs and desires of students, who are the primary users of educational robots. Moreover, we aim to compare this study’s findings with students’ expectations and desires to identify any gaps between expectations and reality [
21].
To achieve this goal, we will begin by formulating Research Questions (RQs) to guide the selection of relevant studies. Our search will focus on the most cited papers in the last decade that discuss ER platforms. The insights gained from this literature review will help us develop an ideal questionnaire that can be used to gather data on students’ expectations and desires when it comes to Educational Robots. Ultimately, the findings of this study will provide valuable insights into the design of educational robots that will be effective and engaging for students.
Based on the observations, we have developed a set of RQs to guide our approach. These are outlined below:
RQ1: What are current trends on ER morphologies in the literature?
RQ2: What do the state-of-the-art ER platforms look like?
RQ3: What should an ER platform look like?
We established a set of requirements and search queries to determine the most appropriate papers of relevance and initiate our research. This method enabled us to refine our focus and select works of significant impact within the literature about our topic. To begin with, we conducted preliminary search queries to identify possible keywords, which resulted in the following terms: “Educational Robotics” OR “Educational Robot” OR “Robotic Platform” OR “Robotics Platform” OR “Robotic Platforms” AND Education OR “Stem Education” OR Educational AND Morphology OR Look. Subsequently, we narrowed the publication time frame to the decade between 2013 and 2023, ensuring that only the most current works were included. Lastly, we limited our selection to conference papers and articles written in English. As a result of these queries, we obtained 53 relevant papers.
It is intriguing to note the concomitance of keywords used to index scientific and technical articles about educational robotics platforms’ morphology within the Scopus database. Through a thorough analysis of keyword co-occurrence following the prerequisites of our research, it was necessary to establish research questions that aligned with our field of interest. To effectively achieve this, we utilized a valuable tool known as Bibliometric Mapping [
22], which allowed us to comprehend the domain, detect potential associations and synergies amongst pertinent terms related to ER morphology, and subsequently define our research questions. This method entails representing the bibliographic data of scientific work through a graph-like structure, highlighting specific attributes and correlations between given terms via distance and size. The distance between two terms reflects the strength of their correlation, with greater distance indicating a weaker correlation and vice versa. The size of a term indicates its relevance and prominence within the specified universe.
By examining the associations amongst the keywords on the bibliometric map of
Figure 1, we concluded the following: the domain of ER predominantly comprises social robots utilized for teaching individuals on the subjects of robot programming and engineering. ER platforms can be broadly categorized into three main classifications: anthropomorphic design (humanoids), more machine-like design, and agricultural robots of industrial nature.
3. Literature Review
Analyzing the selected studies and answering RQ1, we have identified that most of the robotic platforms used belong to one of the following categories: Wheeled robots, of abstract morphology, Humanoids, and Zoomorphic ones (see
Table 1) Following, we discuss our findings.
Wheeled robots
Jurado et al. [
23] trained a group of elementary school teachers to introduce robotics to their students using the KIBO robot [
24]: tangible programming on a screen-free wheeled robotic platform. Algorithmic thinking and coding are taught to students 4 to 7 years old, using cubes representing instructions. The results of their work revealed an increase in Positive Technological Development (PDT) among the students at the end of the academic period, clearly influencing the pupils’ learning.
The scientific community has invested substantially in ER competitions to promote STEM interest among students. The authors in [
25] examine the association between VEX Robotics (
https://www.vexrobotics.com/, accessed on 19 June 2023) Competition (VRC) participation and student self-efficacy. The findings indicate a need for further exploration of the relationship between VRC participation and students’ educational decisions and postsecondary success, despite the results suggesting a correlation between extended VRC participation and enhanced self-efficacy.
Of abstract morphology
Auerbach et al. [
26] developed an open-source modular robot (resembling tree-like shapes), RoboGen, suitable for multidisciplinary education. It is designed for bio-inspired Artificial intelligence (AI) and evolutionary robotics projects at the Master’s level. It consists of predefined and parameterized body parts that can be assembled in various configurations using 3D-printed structural elements and off-the-shelf electronic components. The system allows for customization beyond what is possible with a standardized kit but has a shape referring to a not standardized morphology. According to the research findings, many students responded positively to the learning activity, despite its specialized design, which necessitated a task-specific robot morphology.
Boya-Lara et al. [
27] suggest the development of a STEM course designed to enhance university students’ Computational Thinking (CT) skills using the BEAM (Biology, Electronics, Aesthetics, and Mechanics) robot [
28] as the main instructional tool. That is a simple robot whose morphology controls its behavior, eliminating the need for software programming; its movements and actions are programmed into its construction. The curriculum is designed to explore CT development (decomposition, abstraction, algorithm, debugging, iteration, and generalization) using hardware, with the insect-like robot being subdivided modularly to evaluate the impact of each component on the overall robot.
The authors in [
29] discuss the challenges and opportunities of incorporating soft robotics research into robotics education. Soft robots are controllable systems of flexible materials designed to perform specific tasks. Soft robotics can revolutionize the industry by enabling robots to grow, evolve, self-heal, adapt to their environment, and biodegrade. The authors highlight the challenges of incorporating soft robotics into education, as traditional teaching methods focus on rigid structures and fixed morphologies. In contrast, soft robotics utilizes flexible materials and deformable structures. The authors also explore the potential of soft robotics to improve the comfort and flexibility of wearable hardware.
Educational robots, such as LEGO Mindstorms (EV3 and NXT) (
https://education.lego.com, accessed on 19 June 2023), have primarily had an engineering-oriented design until recently with the introduction of kid-friendly robots such as Dash & Dot (
https://www.makewonder.com/, accessed on 19 June 2023). Comparing these two types of educational robots regarding students’ performance, attitudes, and gender differences, the study in [
30] found no significant difference in students’ attitudes toward learning using robots. Still, female students preferred using Dash & Dot robots for learning programming skills, and that is most probably due to the colorful and toy-like design, in contrast to the more machine-like design of the LEGO robot. On the other hand, some participants preferred the structural form of LEGO NXT, allowing them to construct their own designs.
Zoomorphic
In an ongoing study by [
31,
32], researchers conducted a longitudinal study on Child–Robot Interaction (CRI) to examine how family context influences children’s perception and interaction with a social robot in their home environment. The study focused on a single type of robot, Luka, a parrot-like robot companion with simple morphology and primary functions such as reading books aloud and expressing emotions through facial expressions. The findings revealed that Luka has the potential to attract parental buyers and engage children in long-term use, with children often preferring it over their parents. However, to fully utilize the insights gained from the study, it is important to consider the task of “reading books in preschool age” as an educational process.
Humanoid
There are several interesting results when it comes to studies engaged with humanoid robots or more anthropomorphic ones. The study in [
33] examines the preferences of educational robots among various student groups from junior to undergraduate students’ educational levels. While the findings indicate that younger students favor educational robots with toy-like appearances and cute designs, middle-grade students are more interested in anthropomorphic robots. Senior-grade and undergraduate students, on the contrary, prefer larger-sized educational robots with non-repetitive responses, and undergraduate students prioritize the robots’ functionalities.
Blancas et al. [
21] conducted a study investigating children’s expectations of robot characteristics for interacting with them as educators or social partners. To achieve this, three different robots were employed, including one of machine-like morphology (CodiBot) and two Humanoids, one of which was a cartoon-like character capable of expressing basic facial emotions (Zeno), and the other was an android robot (Nao) with basic human-like characteristics. After prior interactions with the robots, the children were requested to envision their ideal robot companion. The study’s findings suggested that the children preferred humanoid robots over those with machine-like features, with a desire, however, to avoid excessive human-like features.
The use of social robotics for educational purposes, specifically CRI, has gained research interest in recent years [
34]. However, such robots are often only social within scripted activities. Sherlot [
35] examined the use of a robotic tutor [
36,
37], a humanoid Nao robot, in an elementary school to explore breakdowns in children’s interactions with the robot. The study highlighted a number of challenges that necessitate meticulous attention and resolution to enable the integration of robotic tutors in education. That is because several causes of breakdowns occured while children interacted with the robotic tutors, leading to several obstractions during the educational process.
Levinson et al. [
38] compared the effectiveness of two robot morphologies—Patricc and Nao—in delivering word morphology-related activities to children at a summer day camp. The first platform is a low-cost, Do-It-Yourself (DIY) puppet-like robot, and the latter is a more sophisticated higher-cost humanoid robot. Results show that the children’s learning outcomes were not impacted by the type of robot used, indicating that educational summer camp activities with social robots can be effective regardless of the robot’s morphology.
Examining the effect of human-likeness and the impact of social behavior in the design of ER on pupils’ learning, the survey conducted in [
39] experimented with three different designs of robots built from the same materials to test primary school students on robot tutoring in a STEM-related field. While results showed that robot tutoring improved their scores satisfactorily in just 5 min of engagement, these were not affected by the robot’s human likeness or social role.
In
Table 1, we present the works analyzed previously and the corresponding robotic platforms and morphologies utilized under their study in a structured manner. As it is observed, humanoid robots prevail over the other morphologies. This is due to their capacity to allow social connection and communication with humans, which can enhance the educational experience. Since humanoids are more easily relatable, they can increase students’ interest, engagement, and empathy, which raises their motivation levels and improves learning outcomes and memory retention. Additionally, while they can perform human-like movements, their ability to provide realistic scenarios can facilitate the development of problem-solving and critical-thinking skills. Using humanoid robots in the classroom can also give students a more immersive and interactive learning experience, which has been shown to increase their interest and motivation in STEM fields. Humanoid robots can potentially be more relatable to students. They can offer a more natural and intuitive interface for interaction and communication, both of which can improve the effectiveness of learning activities.
Even though our results show a general expectancy toward humanoid robots by children (or learners in general), there is a trap that designers need to pay great attention to: that is the phenomenon whereby the degree of human likeness in a robot’s appearance and behavior determines the emotional response of a human observer. As the robot becomes increasingly human-like, the observer’s emotional response becomes more positive, but once the robot crosses a certain threshold, the response becomes negative and uncomfortable. More commonly, the phenomenon is known as the uncanny valley [
40] and has been extensively researched for the community to recommend keeping a balance between human-like and machine-like appearance [
10,
41,
42].
Thereafter, according to the targeted group of students and the desired learning outcomes, the relevant robotic platform and morphology are selected. While older students prefer robots based on their functionalities, younger ones are attracted by the appearance and colors of the robot as well as the emotional and facial reactions they will imply. Additionally, a toy-like or an animal-like robot will better attract and engage a younger learner longer than an older one.
Table 1.
Studies and relatedness to robot morphology.
Table 1.
Studies and relatedness to robot morphology.
| Article | Educational or Not | Of Relevance to Morph. | Morphology |
|---|
| [26] | ✓ | ✓ | Abstract |
| [43] | ✗ | ✓ | Quadruped |
| [38] | ✓ | ✓ | Puppet-like and Humanoid |
| [44] | ✓ | ✗ | Multimodal |
| [27] | ✓ | ✓ | Abstract—Insect-Like |
| [29] | ✓ | ✓ | Abstract—Soft |
| [35] | ✓ | ✓ | Humanoid |
| [45] | ✗ | ✓ | Multimodal |
| [21] | ✓ | ✓ | Machine-Like, Humanoid and Cartoon-Like |
| [46] | ✓ | ✗ | Humanoid and Abstract |
| [23] | ✓ | ✗ | Wheeled |
| [25] | ✓ | ✗ | Wheeled |
| [31,32] | ✓ | ✓ | Zoomorphic—Parrot-Like |
| [30] | ✓ | ✓ | Toy-Like and Machine-Like |
| [47] | ✓ | ✓ | Abstract—DIY |
| [48] | ✓ | ✗ | Machine-Like |
| [39] | ✓ | ✓ | Humanoid, Zoomorphic and Machine-Like |
| [49] | ✓ | ✗ | Humanoid |
| [50] | ✓ | ✗ | Wheeled and Drone |
| [33] | ✓ | ✓ | Humanoid |
4. What Is Being Used
The second observation we would like to achieve through this study is to identify the current trends in the robotic platforms being used by ER educators and researchers. That is our RQ2. In addition to the works being reviewed for completing the RQ1, we have extended our research and took into consideration works including the keywords “Educational Robot”, “Educational Robots”, “Educational Robotics”, “Robotics Education”, “robotics teaching”, “robotic platforms”, “robotic platform”, and “robotic kit” along with the Boolean expressions AND and OR. We have restricted the time period of the search query to the last three years in order to return only the most recent works.
Our research identified that most of the platforms used have already been identified by the first search query, as shown in
Table 1, meaning that the trends are not differentiated very much. The NAO humanoid robot has been used in a number of research studies [
51,
52,
53] as an assistive robotic platform to attract and motivate students of elementary and middle education. Arduino-based DIY platforms are also widely used as open and affordable platforms, aiming to enhance the educational mission and motivation between the learners [
52,
53,
54].
Table 2 summarizes the robotic platforms used and the relevant morphology adopted by all studies surveyed.
LEGO ecosystem platforms, LEGO Mindstorms (EV3 and NXT), WeDo 2.0, and even their simulation-based alternatives are used for their structural base and ease of conversion to different models and applicability to variable educational levels [
52,
55,
56,
57]. Lastly, we have identified that an alternate structural robotic platform, Engino E30 kit (
https://enginoeducation.com/e30-1/, accessed on 19 June 2023), is also used for creating science–art interactive STEAM projects [
58]. In essence, our findings are also cross-referenced by a more thorough survey on the robotic platforms being used for ER during the last decade [
9].
Summing up our findings, the platforms more frequently used are NAO humanoid robot, the LEGO Mindstorms education platform, and the Arduino kit (as the basis for DIY platforms). In general, there is a tendency to use structural robotic platforms (especially in higher education but also in pre-tertiary), providing the learners with the robot they will interact with, their preferable morph, and additionally engage with differentiated activities. So, platforms such as LEGO Mindstorms, VEX Robotics, Engino, and Fischertechnik Robotics (
https://www.fischertechnik.de/, accessed on 19 June 2023) are quite popular choices.
On the contrary, platforms with fixed morphology are also a preferable choice in lower-level education but also in cases where the learning outcomes comply more with the theoretical curriculum or when the objective is not the construction but the action of the robotic agent.
Table 2.
Studies and robotic platforms used.
Table 2.
Studies and robotic platforms used.
| Article | Morphology | Robot Platform |
|---|
| [26] | Abstract | RoboGen-OpenSource |
| [43] | Quadruped | DyRET Quadruped Robot |
| [38] | Puppet-like and Humanoid | Patricc and NAO |
| [44] | Multimodal | Multimodal (DIY-Preassembled) |
| [27] | Abstract–Insect-Like | BEAM Robotics |
| [29] | Abstract—Soft | Soft robotics |
| [35] | Humanoid | NAO |
| [45] | Multimodal | Not specific platform |
| [21] | Machine-Like, Humanoid and Cartoon-Like | NAO, Zeno, CodiBot |
| [46] | Humanoid and Abstract | Multimodal (NAO, KASPAR, LEGO Mindstorms, R25 Milo, Sphero) |
| [23] | Wheeled | KIBO |
| [25] | Wheeled | VEX Robotics |
| [31,32] | Zoomorphic—Parrot-Like | Luka |
| [58] | Wheeled | Engino E30 |
| [30] | Toy-Like and Machine-Like | Lego NXT and Dash & Dot |
| [47] | Abstract - DIY | Arduino |
| [48] | Machine-Like | Fischertechnik robotic platform |
| [39] | Humanoid, Zoomorphic and Machine-Like | ROBOTIS |
| [49] | Humanoid | Qtrobot |
| [50] | Wheeled and Drone | Sparkfun Redbot, Ryze Tello drone |
| [33] | Humanoid | Unknown |
| [51] | Humanoid | NAO |
| [52] | Humanoid and Hexapod | NAO and Phantom X AX MKII(Arduino) |
| [53] | Humanoid, Abstract and Hexapod | NAO, LEGO EV3 and Phantom X AX MKII(Arduino) |
| [54] | Wheeled | Astrobot (Arduino) |
| [55] | Wheeled | LEGO EV3 |
| [56] | Abstract | LEGO WeDo 2.0 |
| [57] | Abstract | LEGO EV3 |
5. Summary of Contribution—What an Educational Robot Should Look like
Over the course of time, numerous robotic platforms have been developed for educational purposes, delineating their diverse functionalities and approaches to student engagement that have developed over time. In addition to the desired learning outcomes, it is important for product designers to consider the instructional approach employed by students during interactions with robots as well as the specific activities to be undertaken. By understanding these factors, designers can optimize the educational potential of robotic platforms and enhance the overall learning experience for students [
59,
60].
The literature revealed [
23,
46] that educators and teachers (both conventional and Special Education) do not feel confident in using and incorporating ER in their classes or lessons. That is either because they lack prior experience or luck on the market of commercialized products that make use of a common (or identical) interface system for controlling the robots and the interactive activities, or even students (children) tend to continue what they are doing as long as it motivates and stimulates their interest; that is, they are bored easily. The involvement of the users in the design process of the robotic platforms would be of great benefit both to the users themselves and the manufacturers in the long run. Since the children (as users) will be part of the production, this will make sure that the products will meet their needs and expectations, it will be easier to engage with the interactive activities, and the learning outcomes of them will be more efficiently implemented.
To deepen insight into the process of designing a better robotic platform for education, designers need to consider a lot about the previous work carried out and take into consideration the universal design that will be accessible and usable by the whole community [
3]. Moreover, the look of the robot will more likely affect the way the robot partner (student) treats and communicate with them [
61].
Subsequently, designers must also take into account the morphology or physical characteristics that their robot will possess [
10]. Should it resemble a humanoid or a mechanical device? Will it be equipped with wheels or exhibit bipedal locomotion? Furthermore, should the robot possess a distinct personality or merely provide factual answers without participating in decision-making processes?
Taking advantage of all the insights gathered through our survey of the literature, we have contacted a study [
62] in a wide range of students from different regions in Greece from kindergarten to grade 1 until the last grades of primary education. We have tried to select an equal percentage of boys and girls and encouraged them to express their thoughts freely.
The primary objective of this research article is to gain a better understanding and awareness of the preferences and perspectives of students, particularly young children, regarding robot companions in the context of an educational robotics class. The study aims to investigate what aspects of owning or closely interacting with a robot attract students in an educational setting. It also seeks to understand their conceptualization of a robot friend and their expectations regarding interaction and socialization with it [
63].
To ensure the most authentic and unbiased results, the researchers intentionally avoided any prior exposure or demonstration of robots, contrary to other works. They built on prior knowledge that students may have acquired from other media such as ICT, mass media, cartoons or books. This approach aimed to capture the students’ genuine and unaltered views and thought processes in response to the main inquiry. Young children serve as an ideal reflection of their thoughts and desires, as they express their opinions and needs in a straightforward manner. By considering their input, the study aims to facilitate the development of robot constructions that are both highly acceptable and readily adopted by children. Ultimately, this approach aims to enhance engagement with educational content and yield fruitful outcomes while also providing entertainment and enjoyment through the use of robots.
The conclusive findings indicate a significant inclination among students to solicit supplementary assistance in their educational subjects from a robotic companion. This robotic entity, which is to be assigned a name by student, is anticipated to possess a humanoid bipedal structure with a color preference contingent upon the gender of the students. Furthermore, it is expected that this robot will exhibit anthropomorphic attributes in terms of its demeanor and behavior, such as providing assistance and emotional support to students when required, while expressing emotions in a manner akin to humans.
7. Results and Discussion
In the subsequent section, an examination is conducted on the data obtained from the questionnaires administered to students with the aim of elucidating conclusions based on the preferences expressed by the children. The statistical analysis of the collected data was carried out employing the Statistical Package for the Social Sciences (SPSS), Version 29.0.1.0 (171), IBM SPSS Statistics Subscription [
64] software. Initially, all the students exhibited great enthusiasm and intrigue toward the prospect of possessing a robot and engaging with it in their everyday routines. This enthusiasm fostered a candid response to the questionnaire and prompted additional suggestions.
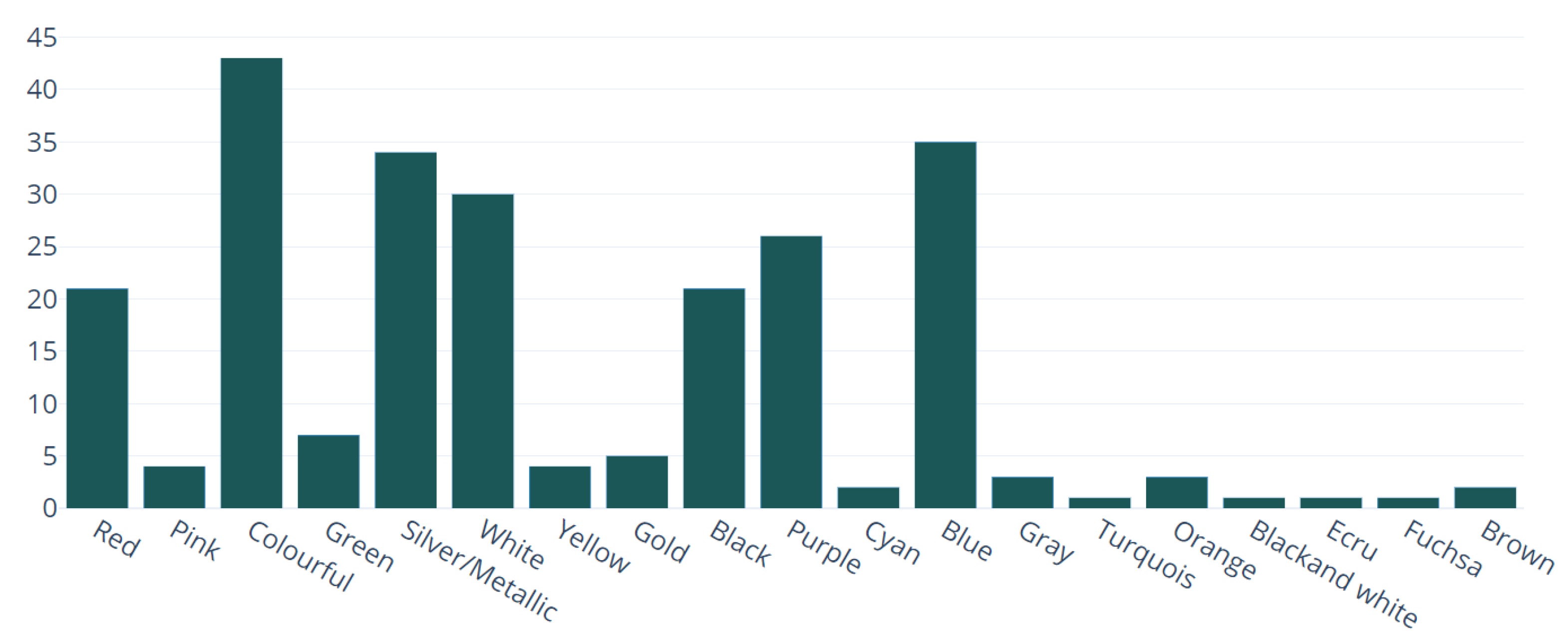
Commencing with external morphological characteristics (
Table 4) and the selection of the robot’s color, a noteworthy proportion of the student participants (16%) expressed a preference for a colorful robot, with the majority of these individuals being girls (72% girls and 28% boys). Furthermore, an equivalent percentage of students (14%) indicated a desire for their robot to be either blue or silver/metallic. Interestingly, in both instances, boys exhibited a stronger inclination toward these colors compared to girls (71% and 65%, respectively, among the 14% who chose blue and silver/metallic). Subsequently, 13% of students selected white, and 11% of students favored purple as their preferred color, with a predominant preference observed among girls, making it the second most chosen color among girls. Additionally, 9% of students selected black, and another 9% chose red as their preferred color. Finally, the remaining students expressed varied preferences for other colors. It is worth noting that some students identified their gender as “Other” and opted for silver/metallic as their preferred color. The outcomes of the students’ color choices are presented in
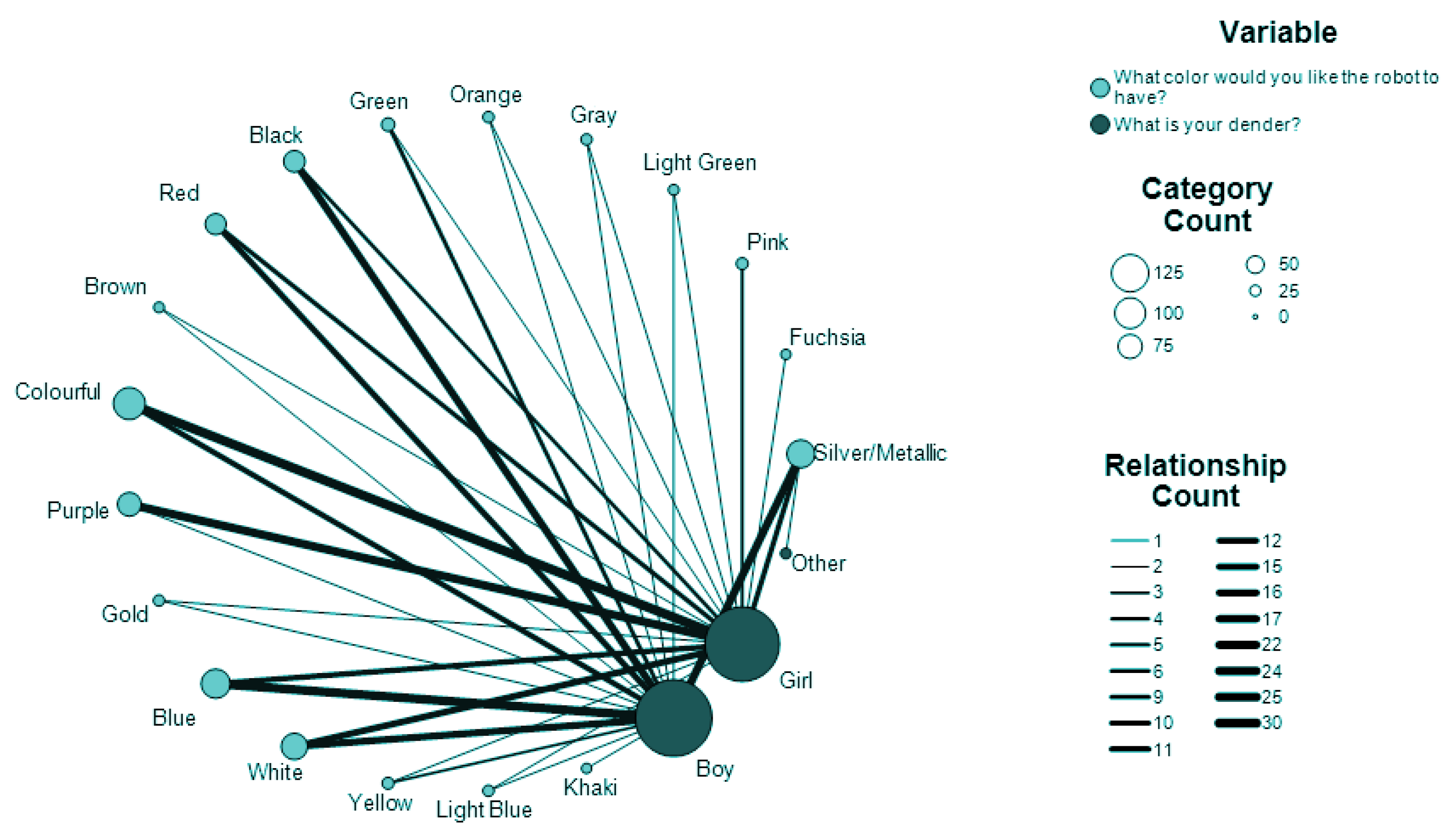
Figure 2, while
Figure 3 illustrates the associations between their choices and their gender.
Upon comparing the color preferences of children with their age and gender, Fisher’s exact tests revealed a statistically significant correlation between these variables. Specifically, it was observed that children of the opposite gender exhibited a tendency to choose different colors. Likewise, different age groups of children displayed varying color preferences. A closer examination of
Figure 3 allows for identifying patterns: boys tended to favor colors such as silver/metallic and blue, while girls tended to opt for colorful and purple. Notably, an interesting observation emerged, wherein both genders displayed an equal inclination toward choosing the color white.
The subsequent question posed to the students pertained to the desired voice of the robot. The findings revealed that children exhibited a notable interest in a boy’s voice, as shown in
Table 5. A substantial percentage of 45% of children selected this option, with 20% of girls among them. Additionally, 34% of the participants chose a girl’s voice for their robot, and the majority of those who made this selection were girls.
Furthermore, 15% of the respondents preferred a man’s voice, while the remaining 5% expressed a preference for a lady’s voice. Lastly, a small fraction of the children indicated a desire for the robot to speak in a manner resembling that of a small baby.
By conducting a Chi-square test to examine the relationship between the variables of gender and the expected voice of the robot, it was observed that the asymptotic significance (
p-value) was less than 0.001. This outcome indicates the rejection of the null hypothesis
. Therefore, in our study, a significant association was identified between the gender of the children and their expected voice for the robot, which is something that can be observed by
Figure 4 by the thickness of lines connecting boys and girls with the preferred robot voice.
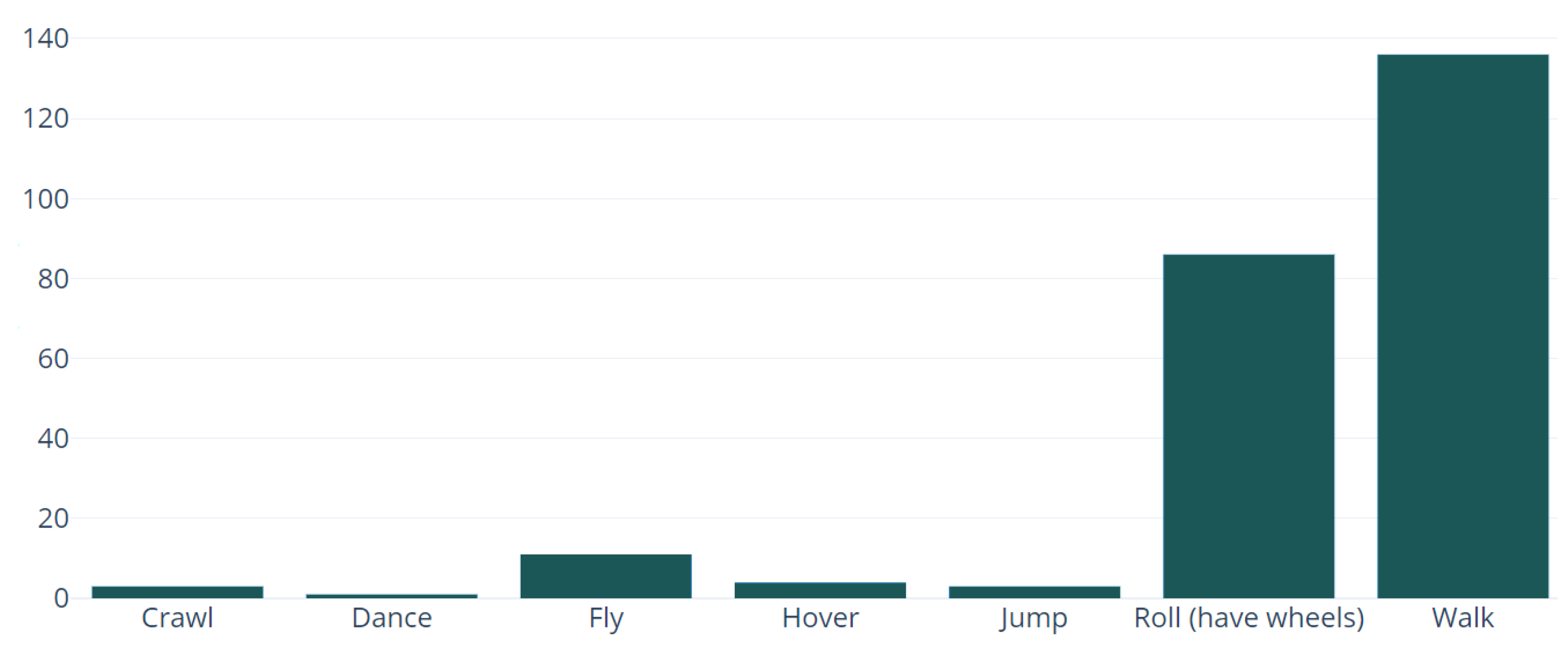
When they were asked about the desired morphology and movement of their robot, the children provided responses that are summarized in
Figure 5. A significant majority, comprising 56% of the participants, expressed a preference for a walking robot. In relation to this topic—the categorization of walking type—for the referred level of students, we exclusively considered bipedalism as the standard norm. In contrast, 35% of the children indicated a desire for their robot to have wheels and roll. A small percentage, approximately 5%, suggested the robot should possess the ability to fly, while 2% expressed a preference for a hovering robot. Interestingly, the remaining 2% expressed diverse preferences, including jumping, dancing, or even crawling as desired movements for their robot.
A Chi-square test was conducted to examine the association between the expected movement of the robot and the gender of the children, resulting in a calculated p-value exceeding 0.001. A similar outcome was obtained when examining the correlation between age and the preferred type of movement. In both cases, the null hypothesis was accepted. Consequently, the results indicate that there is no statistically significant correlation between age or gender and the preferred kind of movement for the robot.
The response to the call is another essential characteristic that a robot must possess. When questioned about this aspect (
Figure 6), the majority of children, accounting for an impressive 73%, expressed their desire to address the robot by its name. A smaller proportion, approximately 17%, preferred to summon the robot through clapping, while only 5% preferred tactile interaction.
A small minority of individuals, constituting 5% of the participants, expressed alternative preferences for calling the robot, such as utilizing a remote control, mobile phones, or employing specific auditory signals such as whistling. Notably, a comment from a sixth-grade child suggested the need for customizable robot-call options to align with specific circumstances. For instance, the robot should not be activated to applaud (clapping). However, statistical analysis using Fisher’s exact tests revealed no significant correlation between age, gender, and children’s expectations regarding the method of calling the robot. Therefore, no discernible connection exists between the gender or age of the children and their preferred approach to interacting with the robot.
In the next set of Rating Scale Multiple Choice Questions, concerning the desired personality traits and socialization characteristics of their robot, students were presented with the questions outlined in
Table 6. In response, children had to indicate their preferences on a scale of 1 to 5, where 1 denoted “I would not like it at all” and 5 represented “I would like it a lot”.
The responses to all questions exceeded a score of 3. The average score of 4.12 (out of 5) indicates that children expressed a strong desire for their robot to exhibit the characteristics indicated by each question. It is worth noting that the least preferred choice among the options provided was “the robot to shake its hands while speaking”. Conversely, the highest expectation was associated with the subsequent question, suggesting that “the robot should have the capability to understand the child when they talk to it”.
Overall, from the above set of questions and the answers given, it is evident that children expect a real friend in the face and personality of their robot. They expect the robot to do things that a real child could do. In addition to the primary expectation of understanding, they also hope that the robot will express its thoughts and feelings. They generally expect that their robot will not be a machine per se but more like a human friend.
In the final segment of the survey, the children were asked about specific educational courses for which they would seek assistance from their robot. It is important to note that the majority of respondents, comprising 85% of the participants, expressed a need for assistance irrespective of any other influencing factors. Conversely, 15% of the children reported not requiring any form of educational support from the robot. Among those who sought assistance, 12% indicated a need across all subject areas. Furthermore, 28% of the children identified Mathematics as the subject in which they required the most assistance, which was followed by Language (Greek) at 23% and History at 11%. Subjects such as Physics, Geography, and English (as a foreign language) received an equal percentage of 2% from the students. The remaining 2% was distributed among subjects including German, Informatics, Foreign Languages (any), Biology, Robotics, and Crafts.
Chi-square tests showed that there is a significant association between the variables
age group and
educational courses, in students requiring assistance; in other words, they are strongly related: the specific courses for which students seek assistance are directly related to the age group or educational level they belong to. We have used the information gathered above, trying to correlate them with the class the students go to. (Many children mentioned that they would require assistance from the robot in more than one course. For the survey’s purposes, we selected as their primary need, only their first choice.) These relationships are depicted in (
Figure 7). We observed a notable trend in the upper grades of elementary school, specifically grades 5 and 6, as well as grade 3, where there exists a significant demand for assistance in Mathematics. Grade 6 exhibits the highest level of demand, which is followed by grades 3 and 5. This observation aligns with feedback provided by teachers in the respective schools, who confirmed the student’s areas of weakness in these particular grade levels. On the other hand, the subject of Language emerges as the second most preferred area for student assistance, with an even distribution across various grades.
The students who express a need for assistance across all their lessons primarily belong to grades 3 and 6. It is worth noting that the classes of these grades correspond to the introduction of new subjects, as also confirmed by their respective teachers.
8. Conclusions
Educational robotics has been extensively researched due to its numerous benefits in enhancing the educational experience, motivation, and enthusiasm toward achieving learning outcomes. Various ER platforms have been utilized in scientific research and STEM education. However, limited research has been conducted on the morphology of these platforms and the students’ expectations in relation to them.
To address this research gap, we conducted a study focusing on the latest trends in the morphology of ER platforms. Based on our findings, we designed and administered a survey using questionnaires in a number of schools based in Greece to explore the students’ expectations of their anticipated robotic companion, without previously exposing or demonstrating them any robotic platform from our side, considering that the majority of them have never had any direct engagement with such artifacts.
The research findings indicated valuable insights that can serve as exemplary models when addressing specific age groups of students or aiming to achieve specific educational outcomes. As previously discussed, children demonstrate a propensity to remain engaged in activities that elicit motivation and pique their interest. The obtained results offer valuable guidance for ER companies targeting particular age or gender groups. For instance, our research reveals that children belonging to specific genders or age groups exhibit preferences for distinct colors. Furthermore, companies aiming to incorporate specific subjects into their educational objectives should consider the ages of the students. This is due to the observed variations in subject weaknesses across different ages and grade levels among children.
Moreover, our research reveals that children have a strong preference for humanoid robots, which is consistent with findings from other studies [
65,
66]. Analysis of the children’s responses to the final set of questions, along with their supplementary comments, indicates that this preference for humanoid robots rises from their desire for close human companionship. The children express expectations that their future robot possesses emotions and engages in interactions akin to those of a human child. Furthermore, the results demonstrate the importance they attribute to assigning a name when addressing the robot in addition to its distinct personality traits. The more human-like characteristics the robot exhibits, the better these children would accept it as their friend or as an educational robot companion.
Our research is in line with other studies that suggest the adaptation of humanoid robots specifically in special education. This morphological design would assist in the acceptance of the adoption of such platforms. Several studies have shown positive effects on participants (diagnosed with Autism Spectrum Condition—ASC) communication and interaction skills, joint attention, and cognitive flexibility when engaging with humanoid robotic platforms [
34,
65]. The adoption of humanoid robots in special education for students with Autism or Learning Difficulties or Disabilities (LD) has the potential to provide several benefits, such as acting as “stepping stones” and in social interaction. However, it is important to consider the views, needs, and contexts of stakeholders and prioritize the needs and values of ASC and LD learners [
67,
68]. Although the ability of humanoid robots to support the development of transferable skills in autistic children is great, it still requires further investigation. It is important to involve key stakeholders in the design and implementation process, ensuring that the purported benefits of robotics are aligned with the actual needs and acceptance of special education learners.
Notably, the study highlights the considerable enthusiasm among children to acquire a personalized robot tailored to their individual preferences. They expect to own one, anticipating interaction and socialization with the robot, as an integral part of their daily routine.
Further research is still needed to deepen our understanding of the impact of different morphologies and appearances on student motivation, learning outcomes, and overall educational experience. Additionally, conducting similar studies in different cultural contexts could provide valuable insights into the cross-cultural variations in students’ expectations and preferences for ER platforms. Overall, the exploration of morphology and appearance in ER holds promise for enhancing student engagement and promoting effective learning experiences in the field of education.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






