
Development of a Robot for Decontamination of High Places and Decommissioning Work That Can Cope with Slopes and Steps


Abstract
:1. Introduction
2. Robot System Configuration
2.1. Robot Development Process
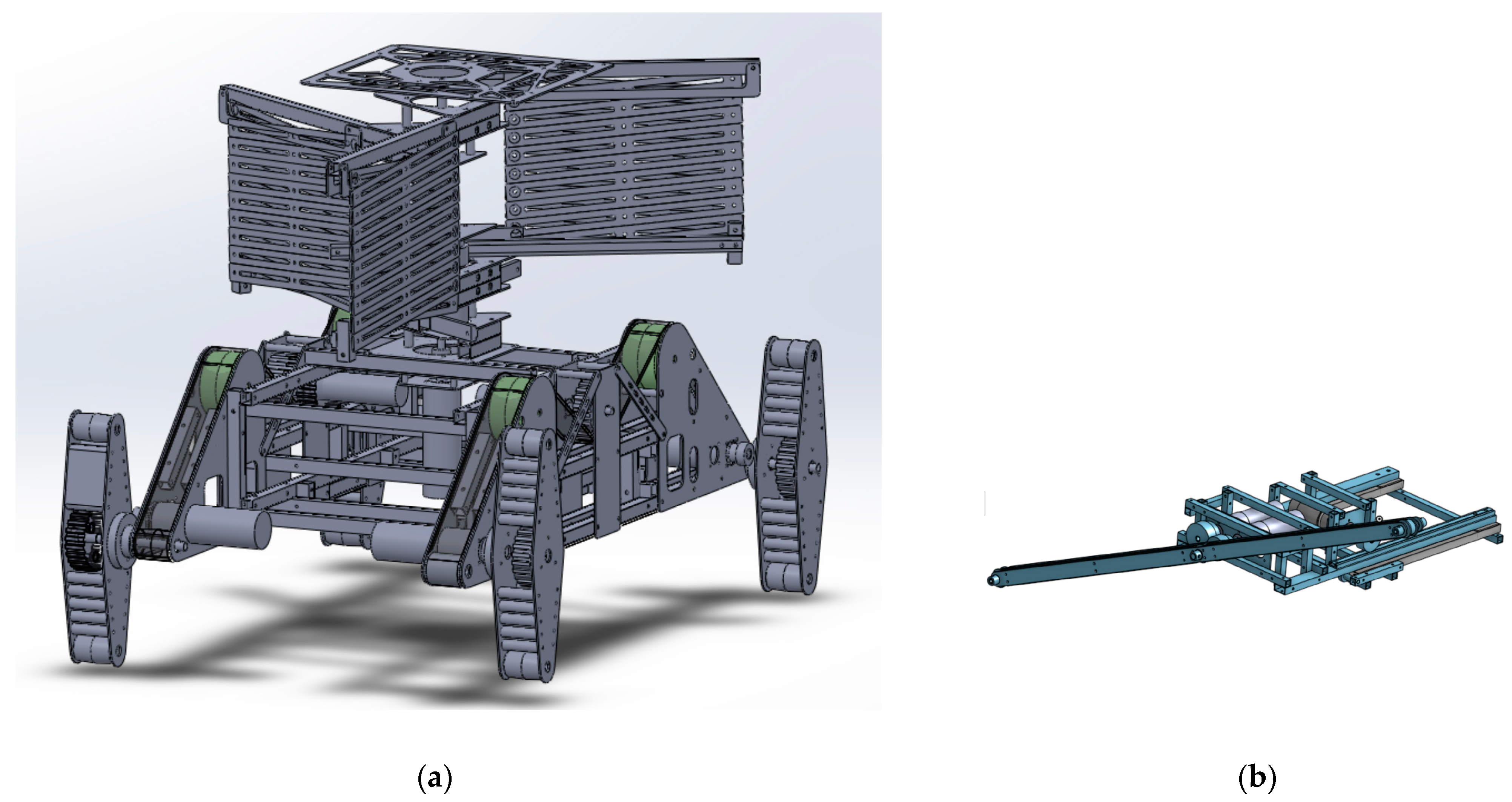
2.2. Robot Functions
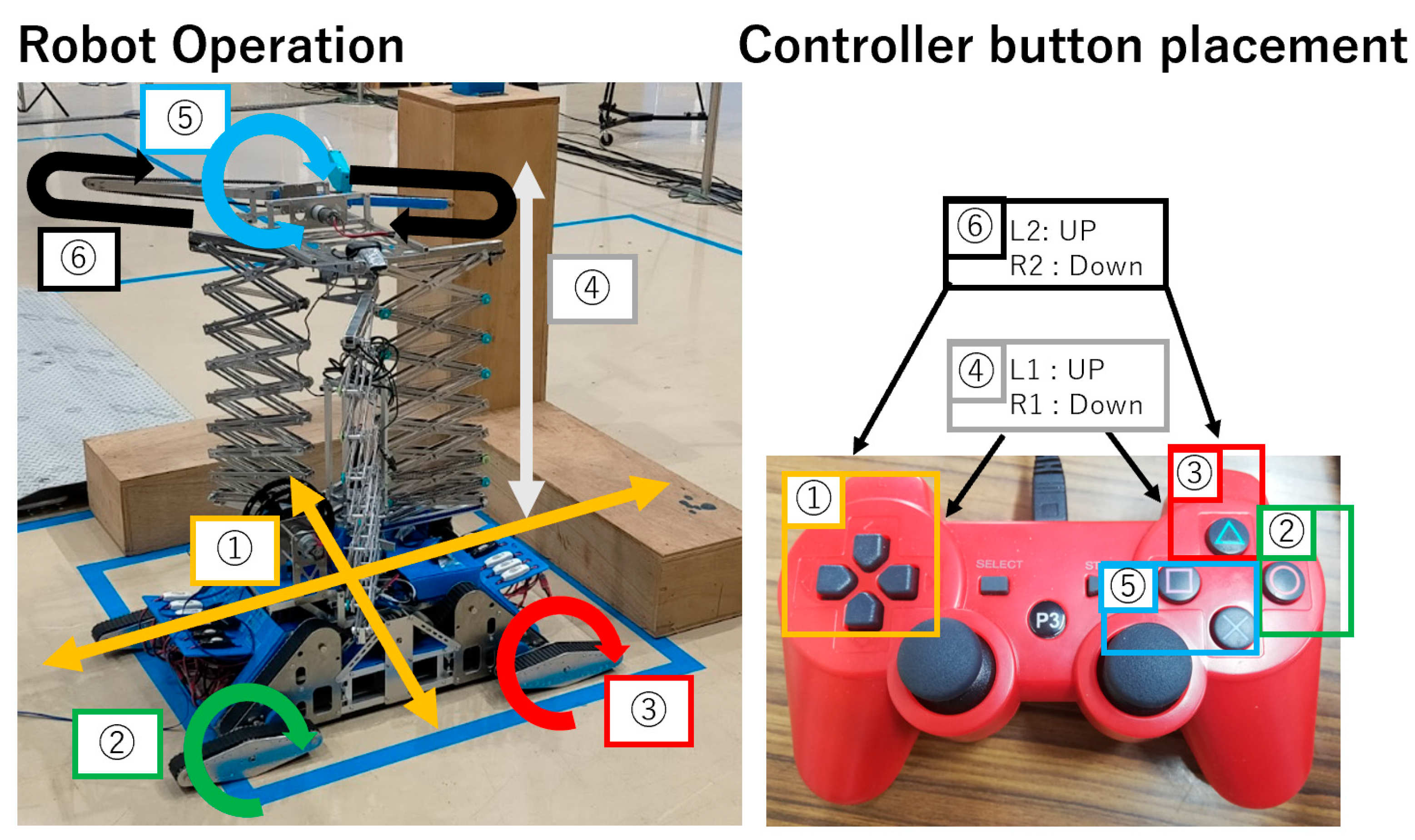
2.3. Electrical Circuits and Control Systems
2.4. Robot Performance and Comparison with Existing Similar Robots
3. Results
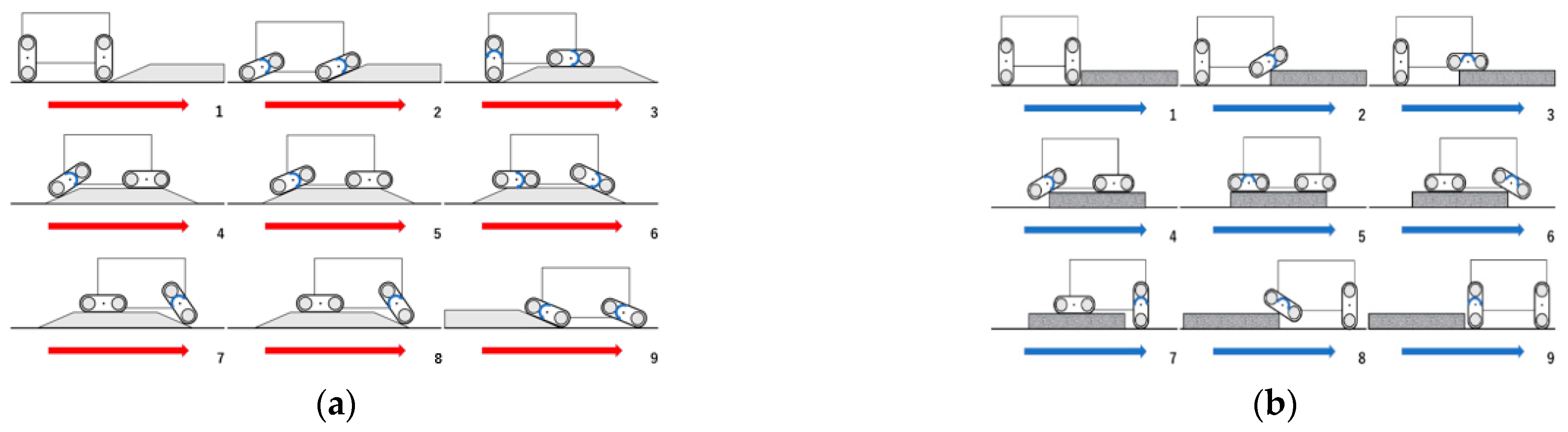
3.1. Overcoming Hills and Steps
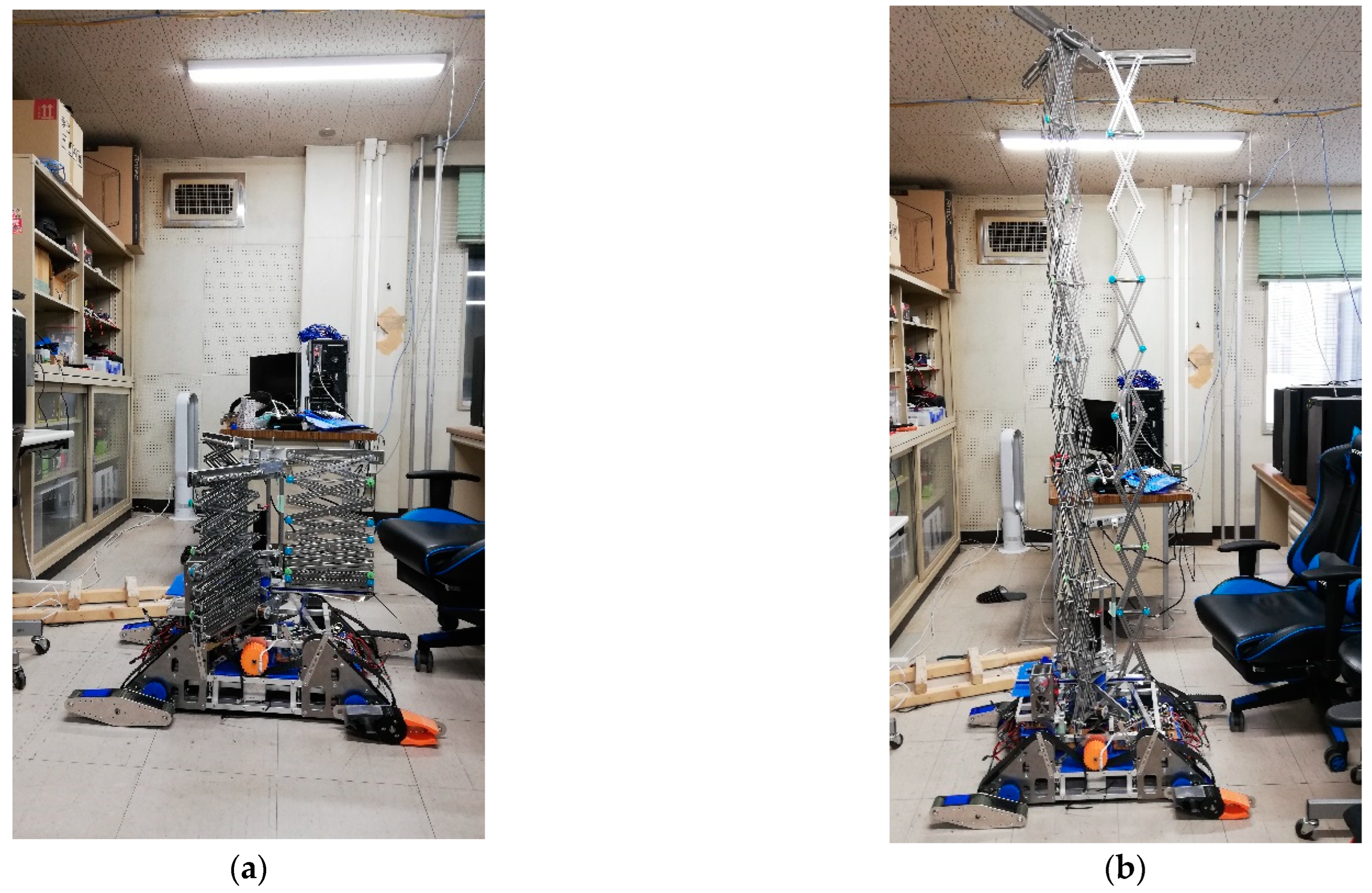
3.2. Deployment to High Altitudes
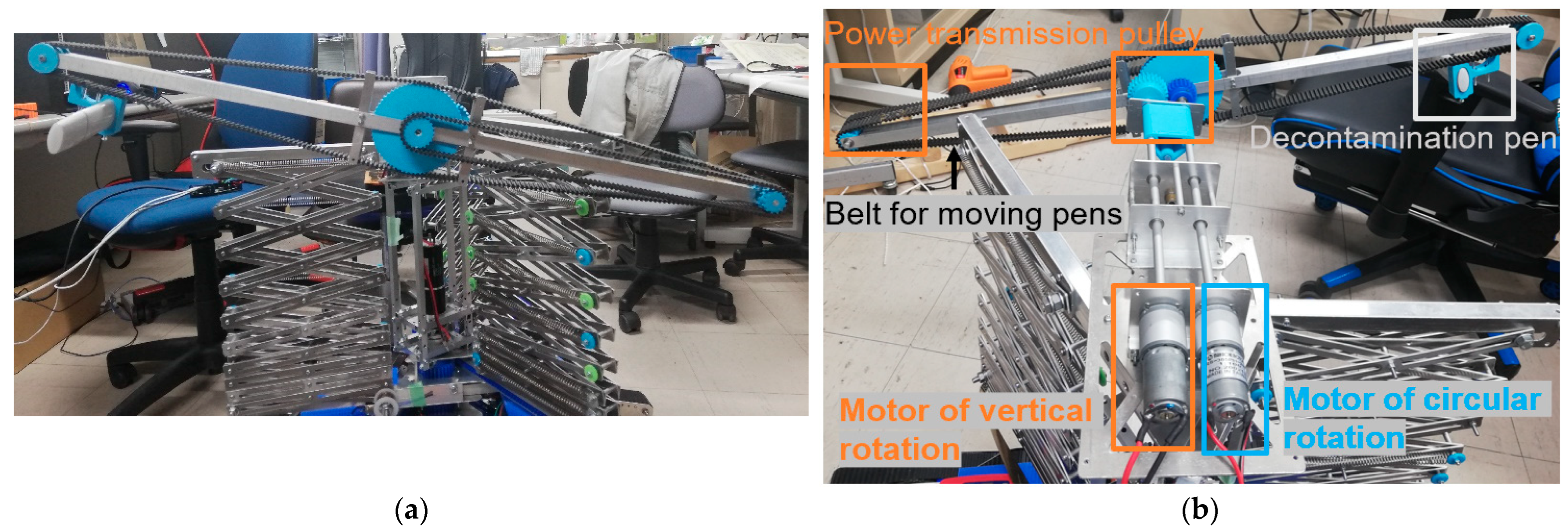
3.3. Results of Decontamination Mechanism Operation
4. Discussion
4.1. Evaluation of the Undercarriage Mechanism
4.2. Evaluation of Deployment Mechanisms
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Wittneben, B.B.F. The impact of the Fukushima nuclear accident on European energy policy. Environ. Sci. Policy 2012, 15, 1–3. [Google Scholar] [CrossRef]
- Brook, B.W.; Bradshaw, C.J.A. Key role for nuclear energy in global biodiversity conservation. Conserv. Biol. 2014, 29, 702–712. [Google Scholar] [CrossRef] [PubMed]
- Osička, J.; Černoch, F. European energy politics after Ukraine: The road ahead. Energy Res. Soc. Sci. 2022, 91, 102757. [Google Scholar] [CrossRef]
- Narabayashi, T. Fukushima Daiichi nuclear power plant accident and analysis evaluation, Boiling Water Reactors. In JSME Series in Thermal and Nuclear Power Generation; Elsevier: Amsterdam, The Netherlands, 2023; Volume 4, pp. 335–406. [Google Scholar]
- Tetsuo, K. Robot challenges for nuclear decommissioning of Fukushima Daiichi Power Station. In Proceedings of the International Conference on Advancing the Global Implementation of Decommissioning and Environmental Remediation Programmes, Madrid, Spain, 23–27 May 2016; International Atomic Energy Agency (IAEA): Vienna, Austria, 2017. [Google Scholar]
- Hideaki, O. R&D outline for decommissioning of the Fukushima Daiichi Nuclear Power Station. In Proceedings of the International Conference on Advancing the Global Implementation of Decommissioning and Environmental Remediation Programmes, Madrid, Spain, 23–27 May 2016; International Atomic Energy Agency: Vienna, Austria, 2017. [Google Scholar]
- Okada, S.; Hirano, K.; Kobayashi, R.; Kometani, Y. Development and application of robotics for decommissioning of Fukushima Daiichi nuclear power plant. Hitachi Rev. 2020, 69, 556–557. [Google Scholar]
- Yamada, T.; Abe, H.; Kawabata, K. Development of Testing Method Considering Tasks with Remotely Controlled Robots in Fukushima Daiichi Nuclear Power Station. In Proceedings of the 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Tokoname, Japan, 4–6 March 2021; pp. 131–134. [Google Scholar]
- Asama, H. Plenary talk III: Robot & remote-controlled machine technology for response of disasters and accidents of nuclear power plants. In Proceedings of the 2012 Proceedings of SICE Annual Conference (SICE), Akita, Japan, 20–23 August 2012. [Google Scholar]
- Petereit, J.; Beyerer, J.; Asfour, T.; Gentes, S.; Hein, B.; Hanebeck, U.D.; Kirchner, F.; Dillmann, R.; Götting, H.H.; Weiser, M.; et al. ROBDEKON: Robotic Systems for Detain in Danger Environment. In Proceedings of the 2019 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Wurzburg, Germany, 2–4 September 2019; pp. 249–255. [Google Scholar]
- Michal, V. Remote operation and robotics technologies in nuclear decommissioning projects. In Nuclear Decommissioning; Woodhead Publishing Series in Energy; Elsevier: Amsterdam, The Netherlands, 2012; pp. 346–374. [Google Scholar]
- Kawabata, K.; Suzuki, K. Development of a Robot Simulator for Remote Operations for Nuclear Decommissioning. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 24–27 June 2019; pp. 501–504. [Google Scholar]
- Yokokohji, Y. The Use of Robots to Respond to Nuclear Accidents: Applying the Lessons of the Past to the Fukushima Daiichi Nuclear Power Station. Annu. Rev. Control Robot. Auton. Syst. 2021, 4, 681–710. [Google Scholar] [CrossRef]
- Schneider, F.E.; Wildermuth, D. Real-World Robotic Competitions for Radiological and Nuclear Inspection Tasks. In Proceedings of the 2019 20th International Carpathian Control Conference (ICCC), Kraków, Poland, 26–29 May 2019; pp. 1–6. [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | Functions and Roles | Mechanisms Comprising the Function | Feature |
|---|---|---|---|
| Undercarriage mechanism | Robot movement, overcoming steps and slopes | Four crawler mechanisms with adjustable angles | Maintaining and moving posture |
| Deployment mechanism | Deploy decontamination mechanisms at high elevations. | Three pantograph mechanisms | High deployment rate |
| Decontamination mechanism | Paint the decontamination area | Two types of rotating mechanisms | Careful and fast decontamination |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogake, S.; Yoshimura, Y.; Inoue, K.; Kobayashi, S.; Kobayashi, K.; Mitsui, S.; Satake, T.; Igo, N. Development of a Robot for Decontamination of High Places and Decommissioning Work That Can Cope with Slopes and Steps. Electronics 2023, 12, 2403. https://doi.org/10.3390/electronics12112403
Ogake S, Yoshimura Y, Inoue K, Kobayashi S, Kobayashi K, Mitsui S, Satake T, Igo N. Development of a Robot for Decontamination of High Places and Decommissioning Work That Can Cope with Slopes and Steps. Electronics. 2023; 12(11):2403. https://doi.org/10.3390/electronics12112403
Chicago/Turabian StyleOgake, Shuichiro, Yu Yoshimura, Koki Inoue, Shu Kobayashi, Kazuma Kobayashi, Satoshi Mitsui, Toshifumi Satake, and Naoki Igo. 2023. "Development of a Robot for Decontamination of High Places and Decommissioning Work That Can Cope with Slopes and Steps" Electronics 12, no. 11: 2403. https://doi.org/10.3390/electronics12112403