
Novel Rotated Virtual Synchronous Generator Control for Power-Sharing in Microgrids with Complex Line Impedance

 , ,
, ,  , ,
, ,  and
and 
Abstract
:1. Introduction
- The use of this proposed mathematical approach allows microgrids that lack inertia and operate with complex line impedance to emulate virtual inertia.
- The RVSG adjusts the voltage and angle of the VSC to the new reference frame and, consequently, improves the stability and performance of the microgrid in which it is implemented.
- The method minimizes the coupling of active and reactive power, improving the dynamic behavior, such as lower steady-state error, fewer oscillations, shorter settling time, and minimum overshoot.
- Active and reactive power control with the RVSG improves power sharing, power quality, stability, and performance, mainly in microgrids with complex line impedance.
2. Proposed Rotational Transformation Matrix on Power Sharing
2.1. Proposed Rotated Reference Frame Based on the Electrical Approach
2.2. Proposed Rotational Transformation Matrix
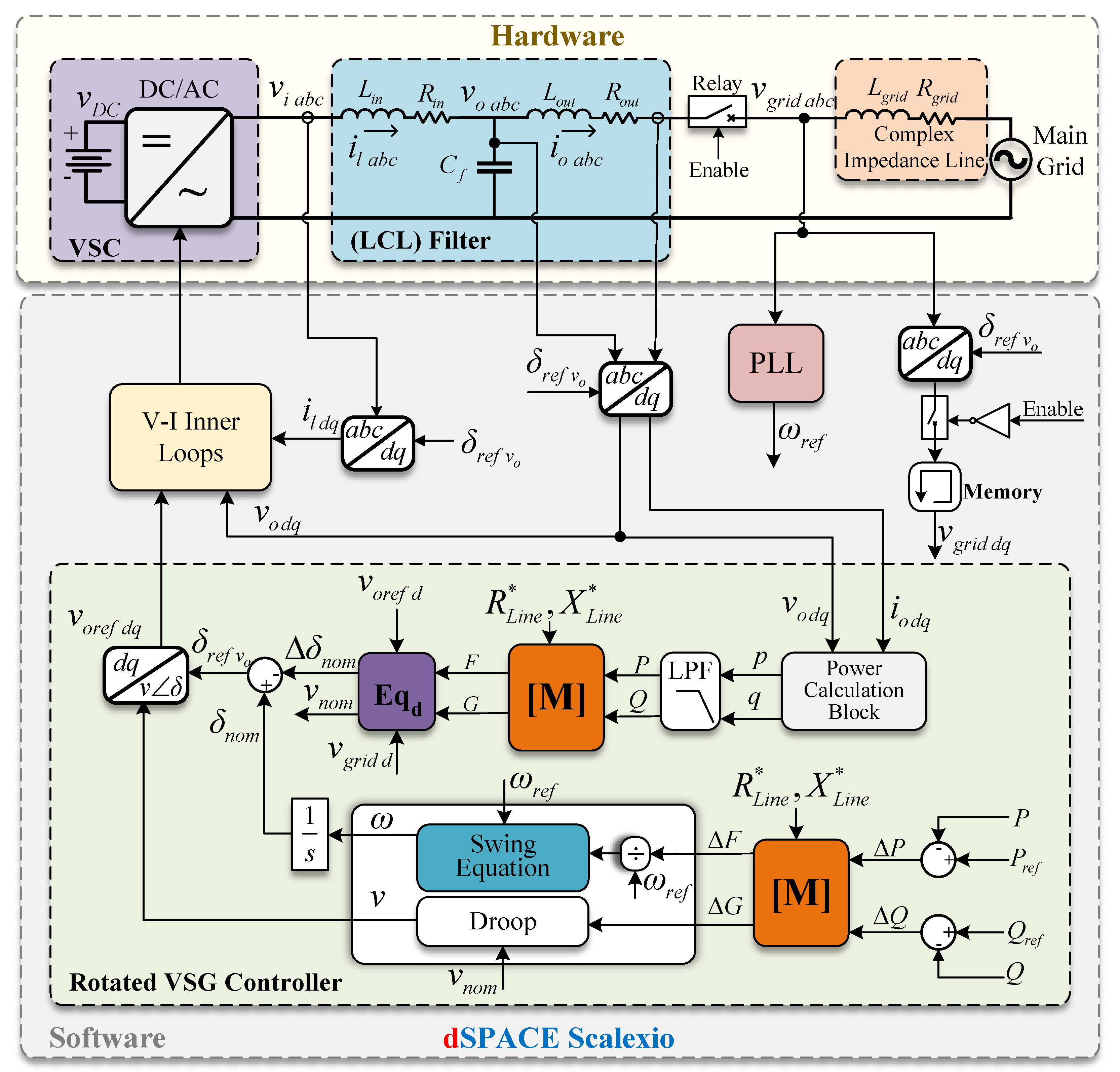
3. Integration of Rotation into VSG Control
4. Model of a Voltage Source Converter with RVSG Control
5. Small-Signal Stability
5.1. Analysis of the Behavior of the Eigenvalues When Changing the Line Impedance Parameters
5.2. Analysis of the Behavior of the Eigenvalues When Changing the VSG Parameters
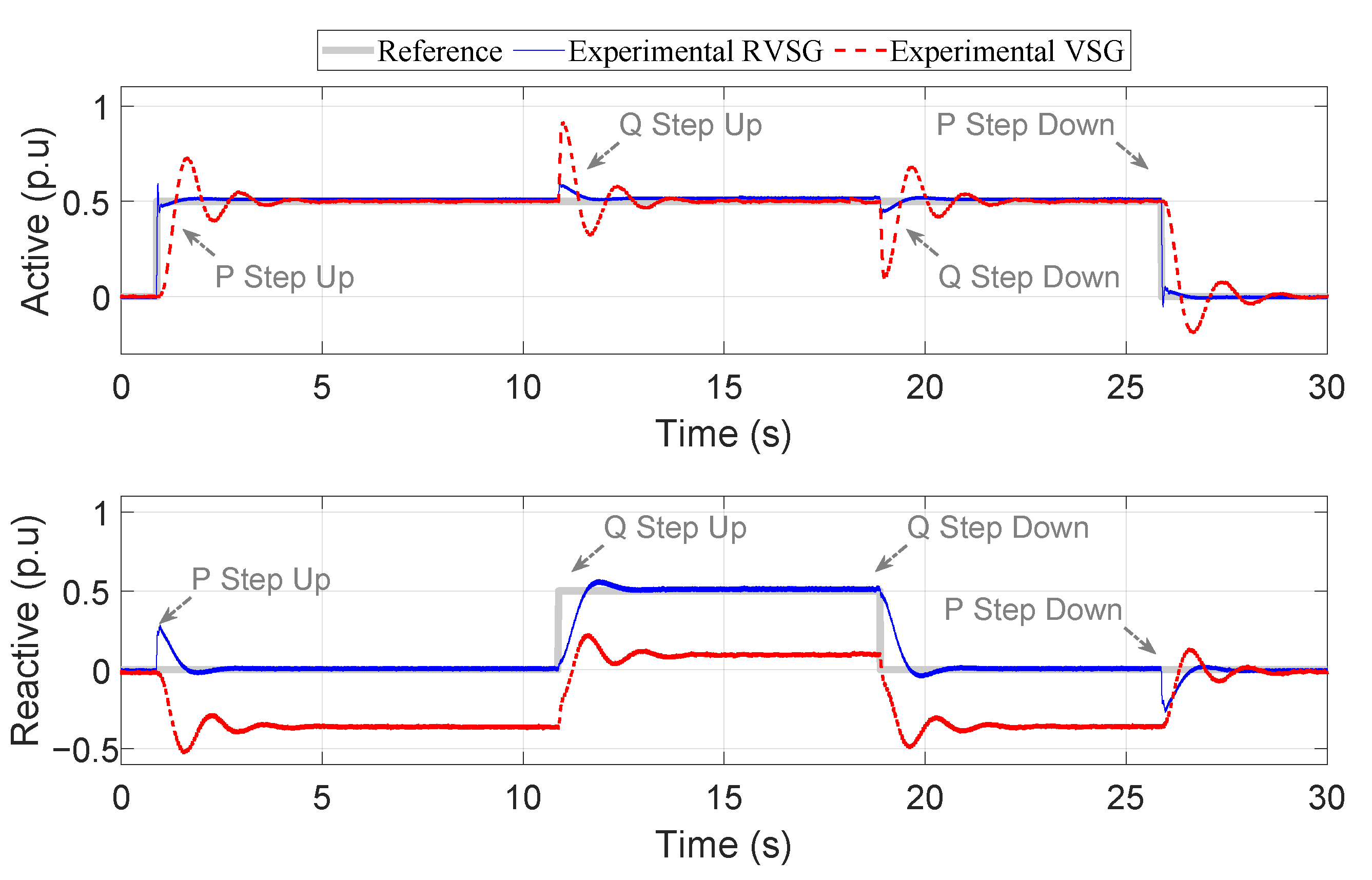
6. Simulation and Experimental Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| H | Virtual inertia constant | Damping coefficient | |
| Angular velocity | Virtual mechanical torque | ||
| Electrical torque | Angular acceleration | ||
| Mechanical power | Active power | ||
| R | Resistance of line impedance | X | Inductance of line impedance |
| E | Voltage of the source sending power | V | Voltage of the receiving source power |
| F | New axis for active power | G | New axis for reactive power |
| M | New rotation matrix | Complementary angle of impedance angle | |
| Z | Magnitude of impedance | Output frequency | |
| Inverter reference output voltage | v | Controller output voltage | |
| Frequency reference | Voltage reference | ||
| Line resistance equivalent | Line reactance equivalent | ||
| Delta angle | Reactive slope coefficient |
References
- Uudrill, J.M. Dynamic Stability Calculations for an Arbitrary Number of Interconnected Synchronous Machines. IEEE Trans. Power Appar. Syst. 1968, PAS-87, 835–844. [Google Scholar] [CrossRef]
- Beck, H.P.; Hesse, R. Virtual synchronous machine. In Proceedings of the 2007 9th International Conference on Electrical Power Quality and Utilisation, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, Y.; Hesse, R.; Turschner, D.; Beck, H.P. Improving the grid power quality using virtual synchronous machines. In Proceedings of the 2011 International Conference on Power Engineering, Energy and Electrical Drives, Malaga, Spain, 11–13 May 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters That Mimic Synchronous Generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Chen, Y.; Hesse, R.; Turschner, D.; Beck, H.P. Comparison of methods for implementing virtual synchronous machine on inverters. In Proceedings of the International Conference on Renewable Energies and Power Quality (ICREPQ’12), Santiago de Compostela, Spain, 28–30 March 2012; Volume 1. [Google Scholar] [CrossRef]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability And Control; EPRI Power System Engineering Series; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Meng, L.; Savaghebi, M.; Andrade, F.; Vasquez, J.C.; Guerrero, J.M.; Graells, M. Microgrid central controller development and hierarchical control implementation in the intelligent microgrid lab of Aalborg University. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 2585–2592. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; Garcia de Vicuna, L.; Castilla, M.; Miret, J. Decentralized Control for Parallel Operation of Distributed Generation Inverters Using Resistive Output Impedance. IEEE Trans. Ind. Electron. 2007, 54, 994–1004. [Google Scholar] [CrossRef]
- Li, M.; Shu, S.; Wang, Y.; Yu, P.; Liu, Y.; Zhang, Z.; Hu, W.; Blaabjerg, F. Analysis and Improvement of Large-Disturbance Stability for Grid-Connected VSG Based on Output Impedance Optimization. IEEE Trans. Power Electron. 2022, 37, 9807–9826. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed Control Techniques in Microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Saadatmand, S.; Shamsi, P.; Ferdowsi, M. Power and Frequency Regulation of Synchronverters Using a Model Free Neural Network-Based Predictive Controller. IEEE Trans. Ind. Electron. 2021, 68, 3662–3671. [Google Scholar] [CrossRef]
- Wu, W.; Zhou, L.; Chen, Y.; Luo, A.; Dong, Y.; Zhou, X.; Xu, Q.; Yang, L.; Guerrero, J.M. Sequence-Impedance-Based Stability Comparison Between VSGs and Traditional Grid-Connected Inverters. IEEE Trans. Power Electron. 2019, 34, 46–52. [Google Scholar] [CrossRef]
- Mohammed, N.; Ravanji, M.H.; Zhou, W.; Bahrani, B. Online Grid Impedance Estimation-Based Adaptive Control of Virtual Synchronous Generators Considering Strong and Weak Grid Conditions. IEEE Trans. Sustain. Energy 2023, 14, 673–687. [Google Scholar] [CrossRef]
- Park, R.H. Two-reaction theory of synchronous machines generalized method of analysis-part I. Trans. Am. Inst. Electr. Eng. 1929, 48, 716–727. [Google Scholar] [CrossRef]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Instantaneous Reactive Power Compensators Comprising Switching Devices without Energy Storage Components. IEEE Trans. Ind. Appl. 1984, IA-20, 625–630. [Google Scholar] [CrossRef]
- Driesen, J.; Visscher, K. Virtual synchronous generators. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–3. [Google Scholar] [CrossRef]
- Campo-Ossa, D.D.; Sanabria-Torres, E.A.; Vasquez-Plaza, J.D.; Patarroyo-Montenegro, J.F.; Lopez-Chavarro, A.F.; Rengifo, F.A. Parametric Comparative Analysis between Virtual Synchronous Generator and Droop-based Inertia for Inverter-Based Microgrids. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Leitner, S.; Yazdanian, M.; Mehrizi-Sani, A.; Muetze, A. Small-Signal Stability Analysis of an Inverter-Based Microgrid With Internal Model-Based Controllers. IEEE Trans. Smart Grid 2018, 9, 5393–5402. [Google Scholar] [CrossRef]
- Patarroyo-Montenegro, J.F.; Salazar-Duque, J.E.; Alzate-Drada, S.I.; Vasquez-Plaza, J.D.; Andrade, F. An AC Microgrid Testbed for Power Electronics Courses in the University of Puerto Rico at Mayagüez. In Proceedings of the 2018 IEEE ANDESCON, Cali, Colombia, 22–24 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Vasquez-Plaza, J.D.; Lopez-Chavarro, A.F.; Sanabria-Torres, E.A.; Patarroyo-Montenegro, J.F.; Andrade, F. Benchmarking Real-Time Control Platforms Using a Matlab/Simulink Coder with Applications in the Control of DC/AC Switched Power Converters. Energies 2022, 15, 6940. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Fundamental frequency | 376.99 rad/s | |
| Inductance of the grid | 0.0001 H to 0.002 H | |
| Resistance of the grid | 0.2 to 2.2 | |
| Virtual inertia constant VSG | H | 1.42 s |
| Damping coefficient VSG | 14.53 Ns/m | |
| Amplitude droop | 0.02 to 0.04 V/VAR | |
| Cut-off frequency of measuring filter | 18.85 rad/s | |
| Grid voltage (main AC) | (V) | 120 |
| Inverter output voltage | () | 120.63 |
| Filter capacitance | 8.8 F | |
| Filter inductance | 1.8 mH | |
| Series resistance of the filter inductor | 0.18 |
| Parameter | Symbol | Value |
|---|---|---|
| Inductance filter | 0.0018 H | |
| Resistance filter | , | 0.2 |
| DC bus voltage | 400 V | |
| Voltage loop | , | 0.35, 400 |
| Current loop | , | 0.7, 100 |
| Switching frequency | 10 |
| Parameter | VSG | RVSG | |
|---|---|---|---|
| Active Power | Settling Time [s] | 4.11 | 0.68 |
| Rise Time [s] | 0.35 | 0.05 | |
| Overshoot Step Up [%] | 45 | 15 | |
| Steady-State Error [%] | 2 | 2 | |
| Reactive Power | Settling Time [s] | 3.5 | 1.8 |
| Rise Time [s] | 0.5 | 0.4 | |
| Overshoot Step Up [%] | 22 | 10 | |
| Steady-State Error [%] | 35 | 1.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Campo-Ossa, D.D.; Sanabria-Torres, E.A.; Vasquez-Plaza, J.D.; Rodriguez-Martinez, O.F.; Garzon-Rivera, O.D.; Andrade, F. Novel Rotated Virtual Synchronous Generator Control for Power-Sharing in Microgrids with Complex Line Impedance. Electronics 2023, 12, 2156. https://doi.org/10.3390/electronics12102156
Campo-Ossa DD, Sanabria-Torres EA, Vasquez-Plaza JD, Rodriguez-Martinez OF, Garzon-Rivera OD, Andrade F. Novel Rotated Virtual Synchronous Generator Control for Power-Sharing in Microgrids with Complex Line Impedance. Electronics. 2023; 12(10):2156. https://doi.org/10.3390/electronics12102156
Chicago/Turabian StyleCampo-Ossa, Daniel D., Enrique A. Sanabria-Torres, Jesus D. Vasquez-Plaza, Omar F. Rodriguez-Martinez, Oscar D. Garzon-Rivera, and Fabio Andrade. 2023. "Novel Rotated Virtual Synchronous Generator Control for Power-Sharing in Microgrids with Complex Line Impedance" Electronics 12, no. 10: 2156. https://doi.org/10.3390/electronics12102156