

The Identification Method of the Winding Vibration Faults of Dry-Type Transformers

Abstract
:1. Introduction
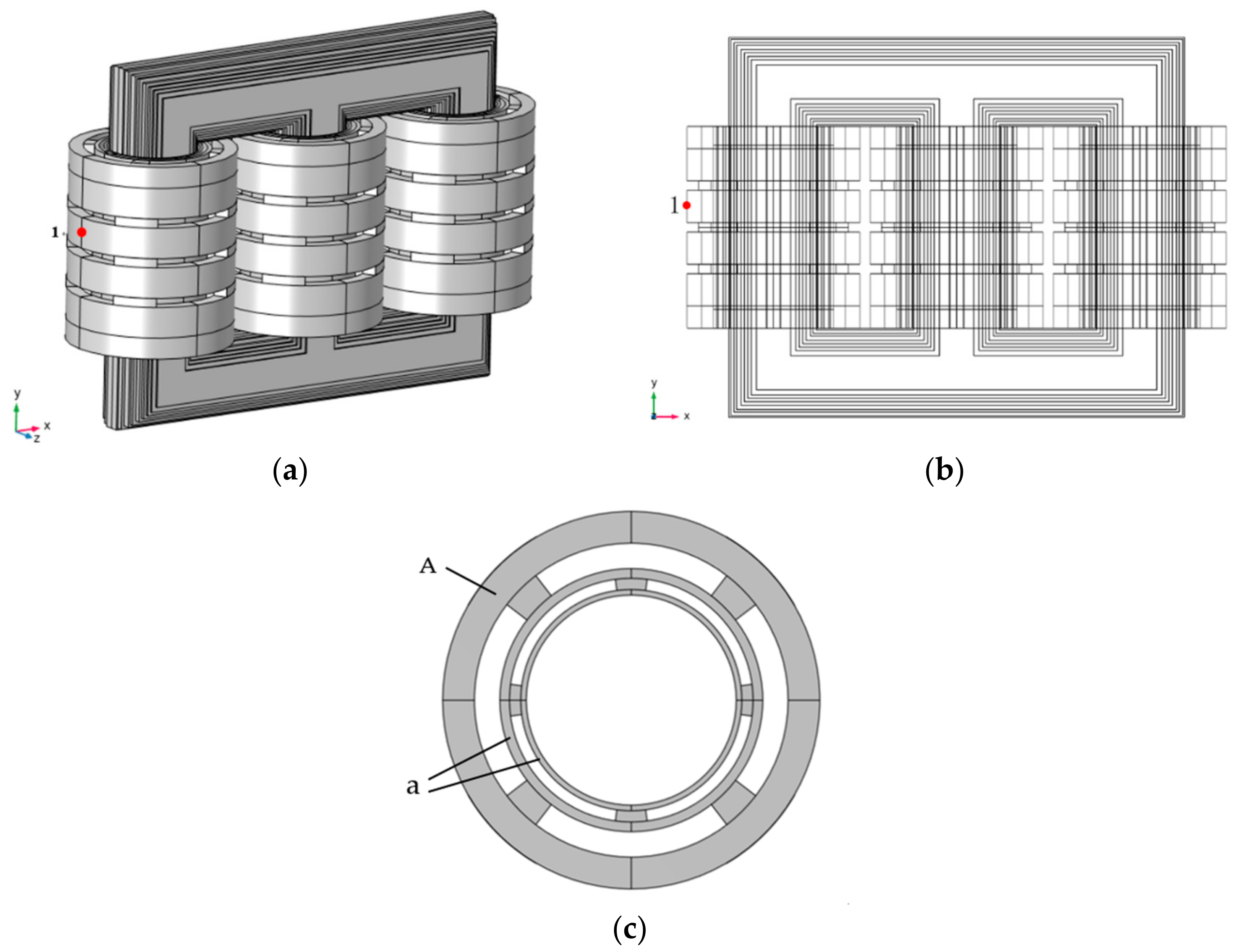
2. Transformer Modeling
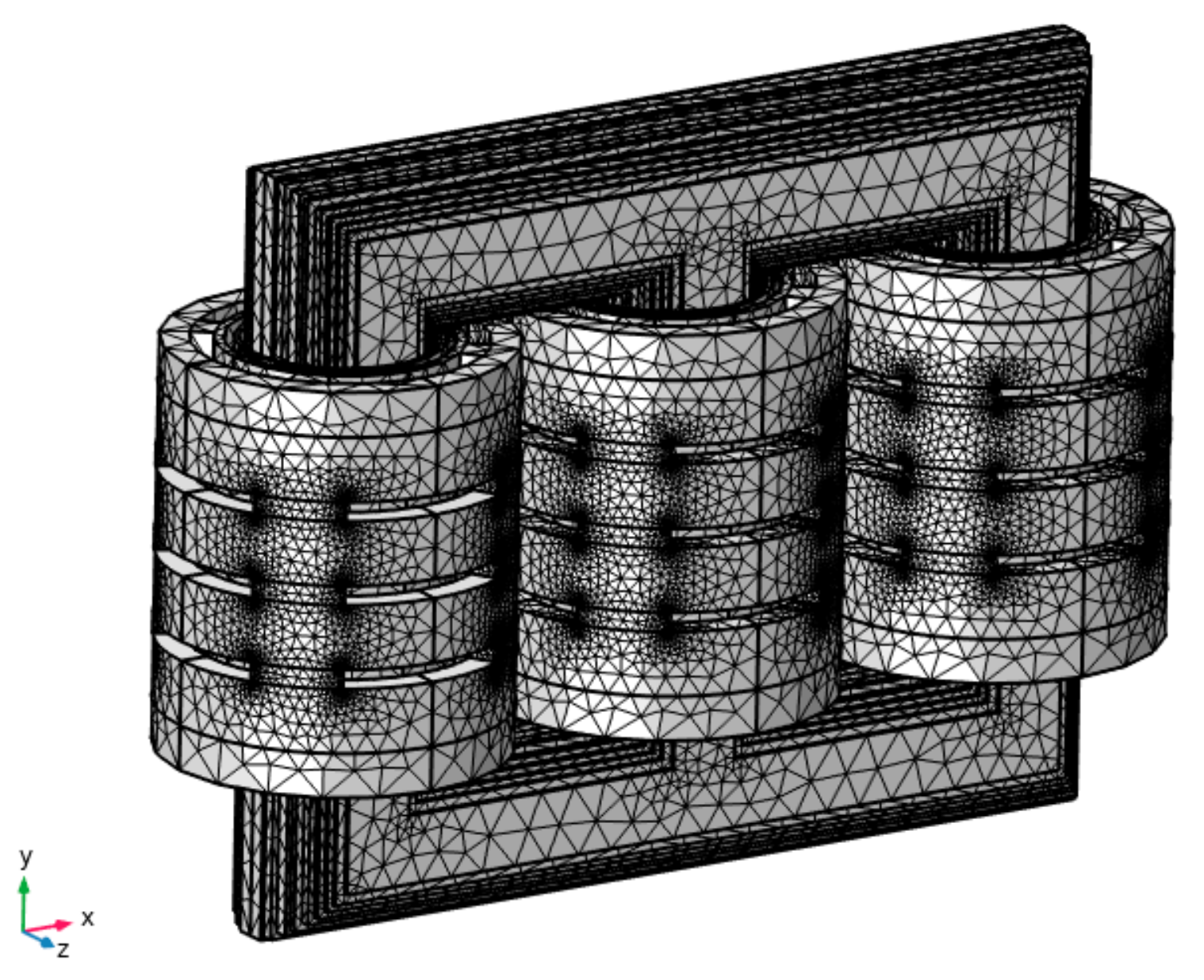
2.1. Transformer Model Simplification and Grid Generation
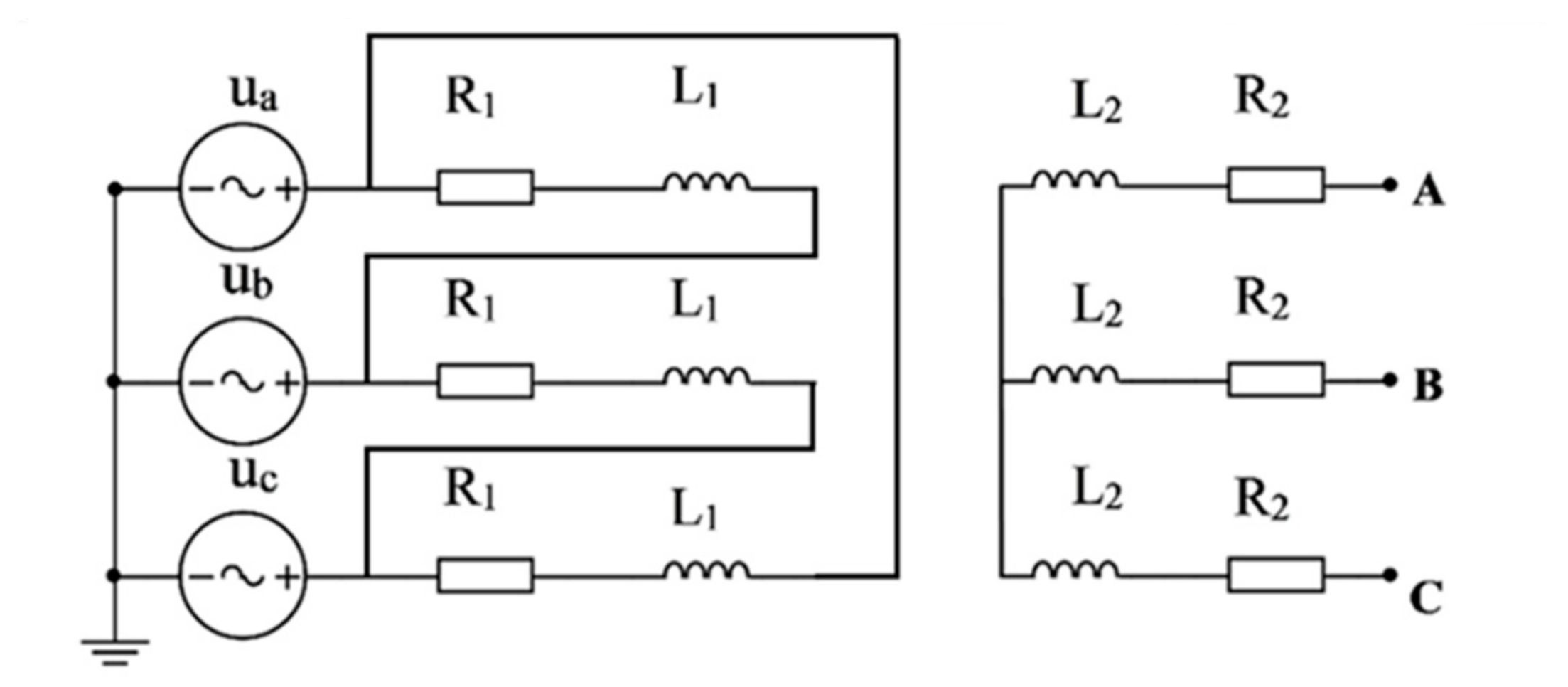
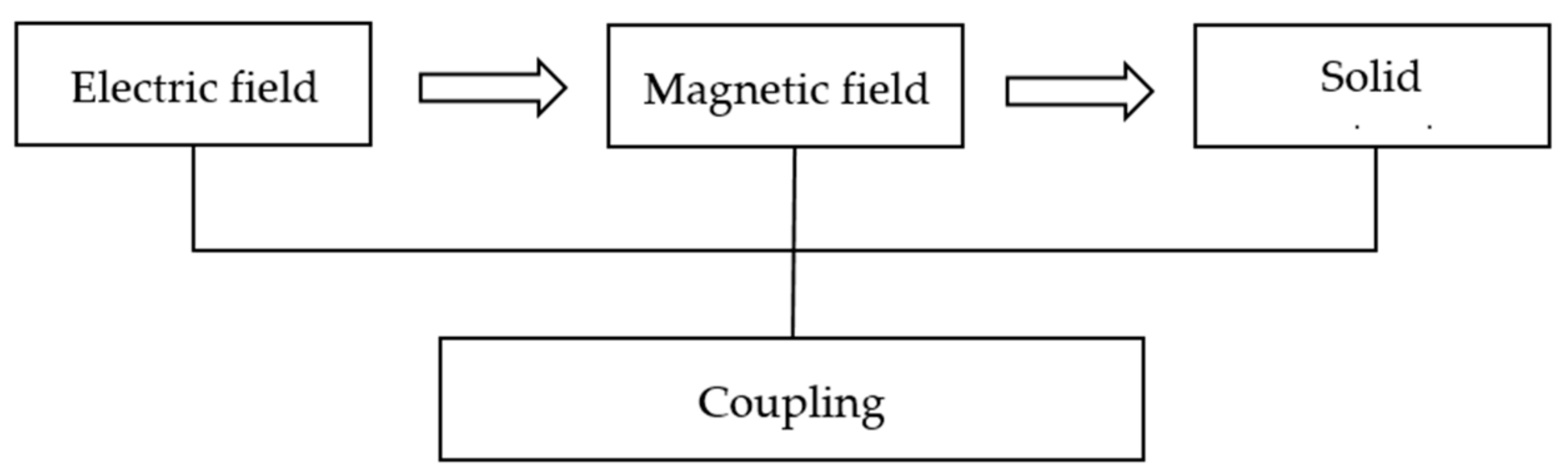
2.2. Electromechanical Multiphysical Field Module
3. Modeling of the Four Faults in the Transformer Windings
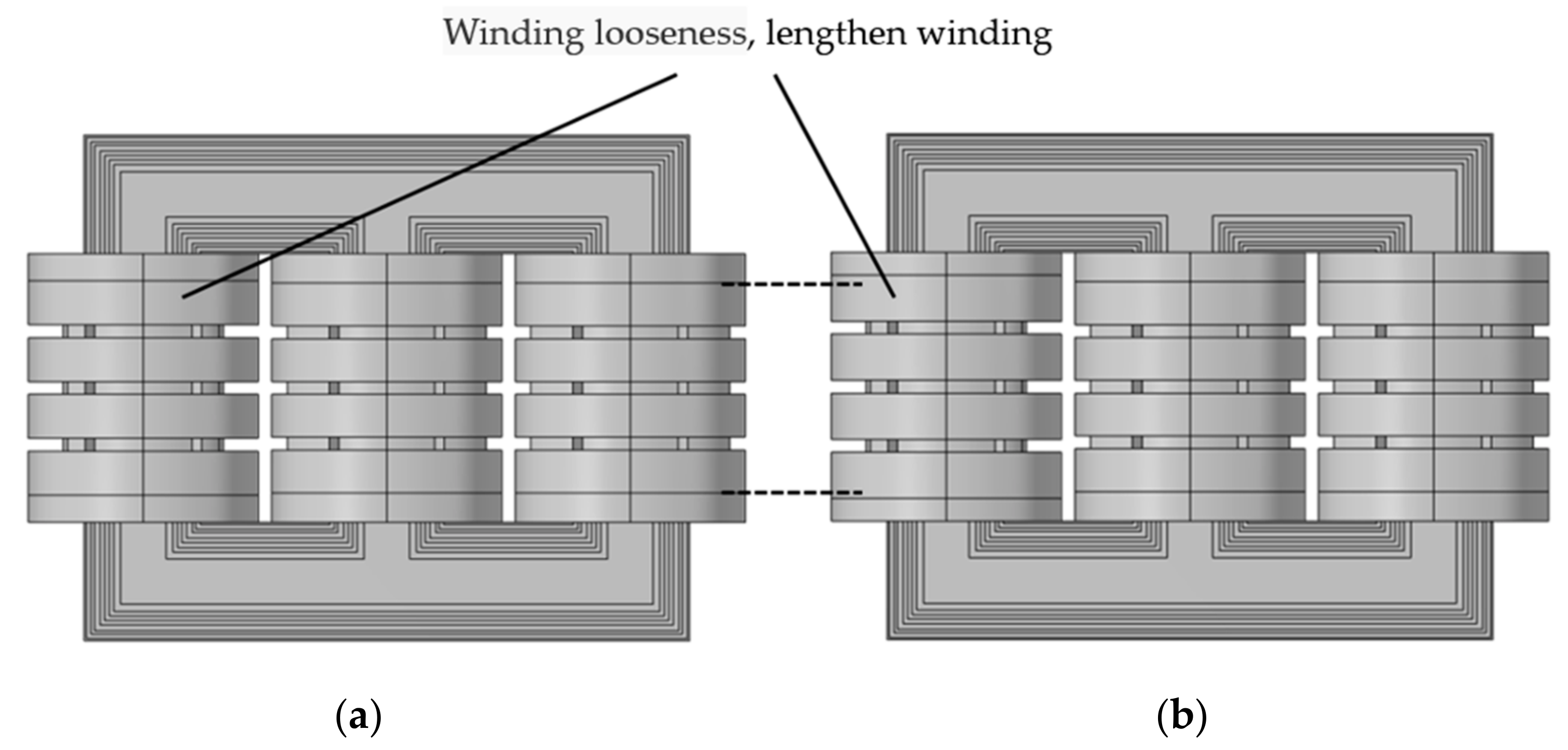
3.1. Loose Winding Fault
3.2. Electromechanical Multiphysical Field Module
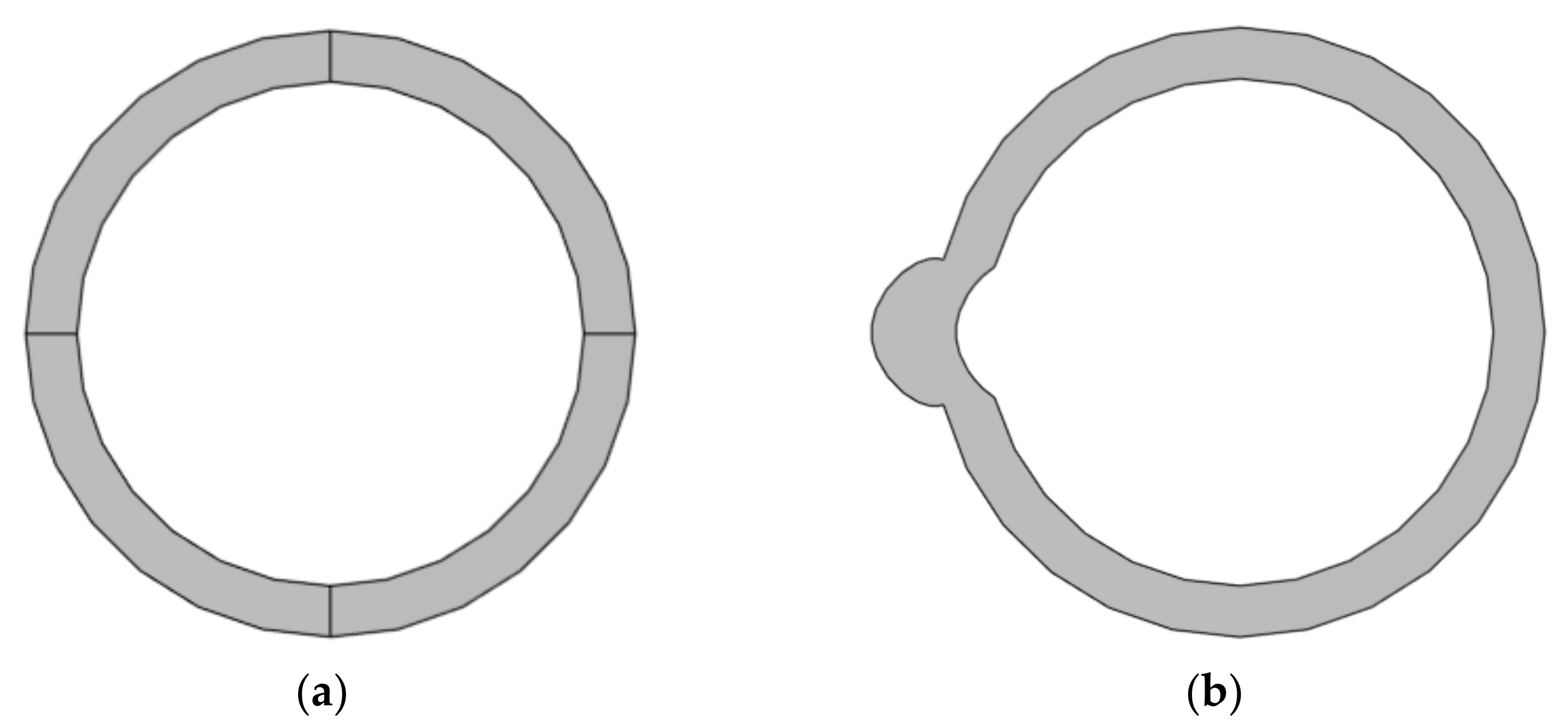
3.3. Winding Deformation Simulation
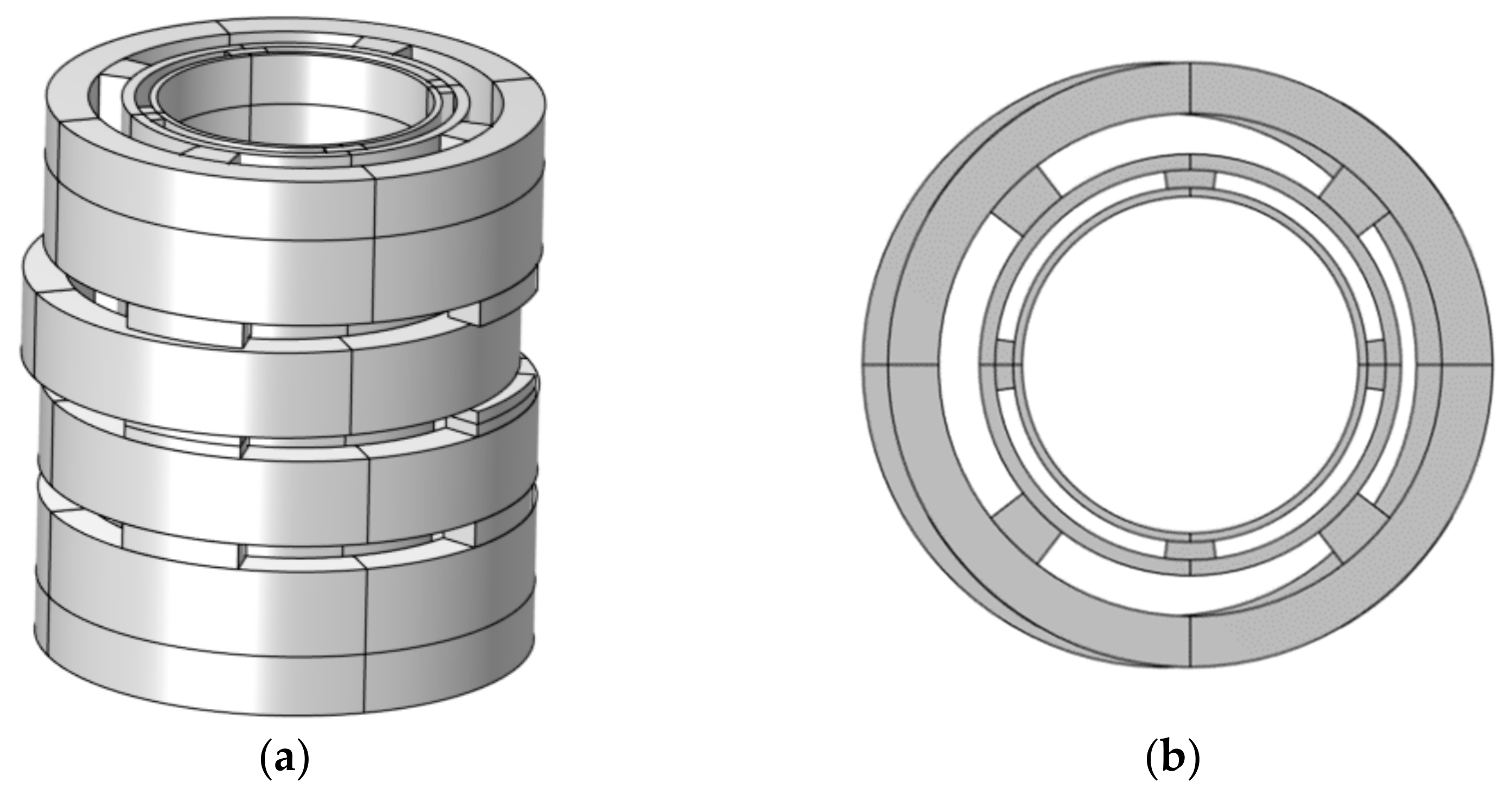
3.4. Winding Eccentricity Fault
4. Simulation Analysis and the Identification Method of Transformer Winding Faults
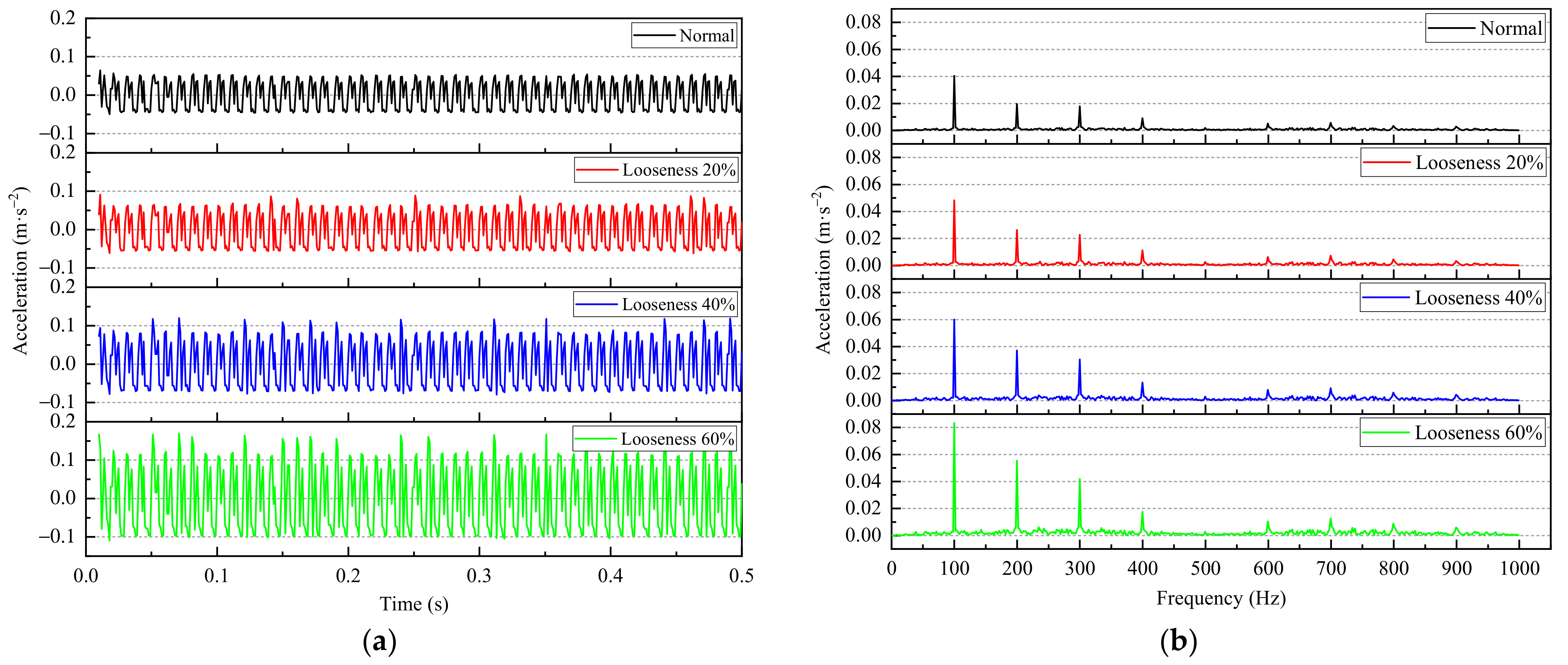
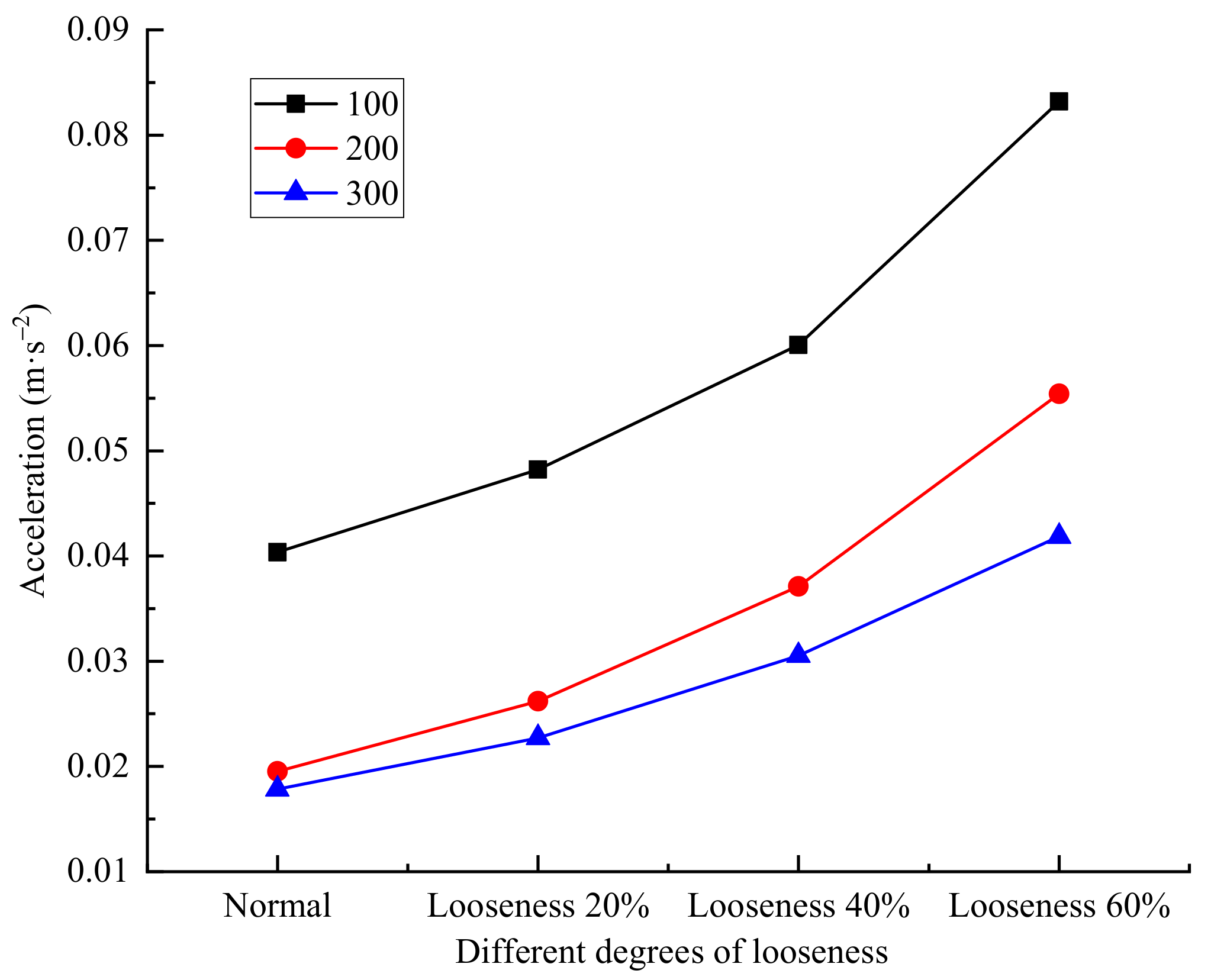
4.1. Simulation Analysis of the Winding Looseness Fault
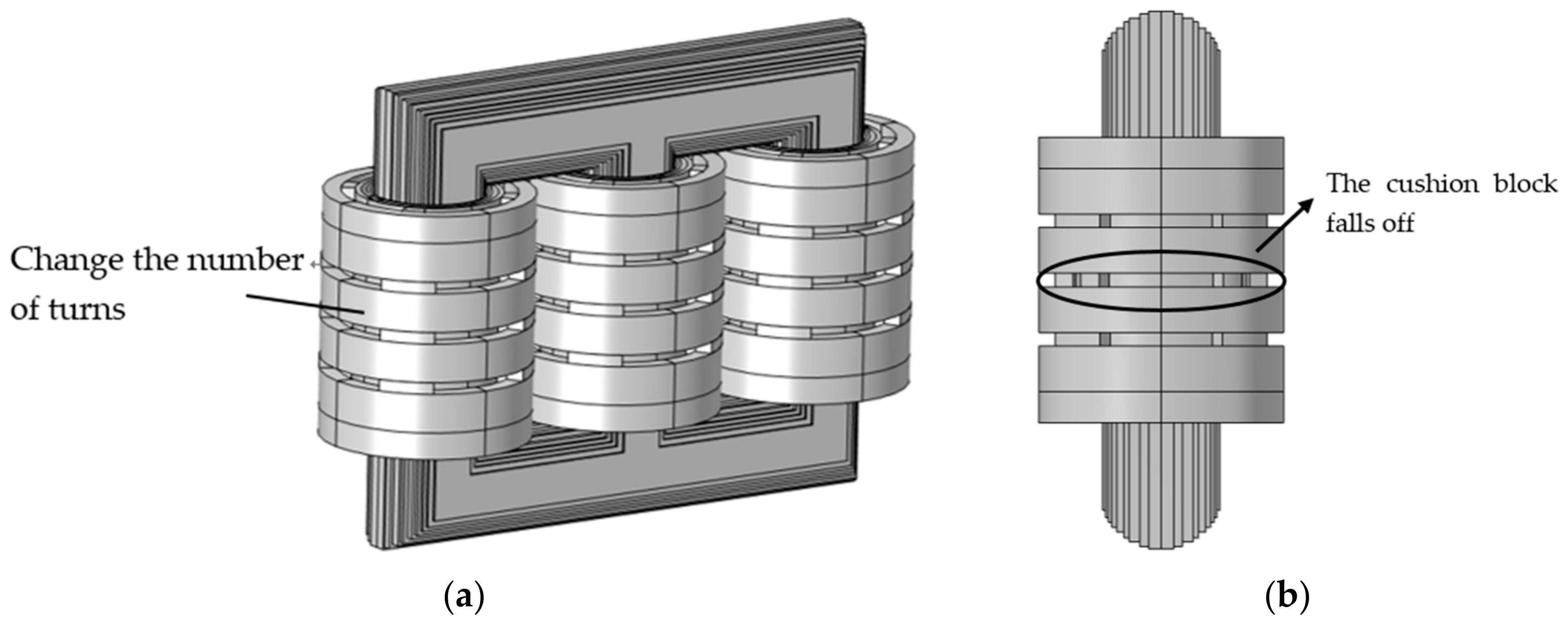
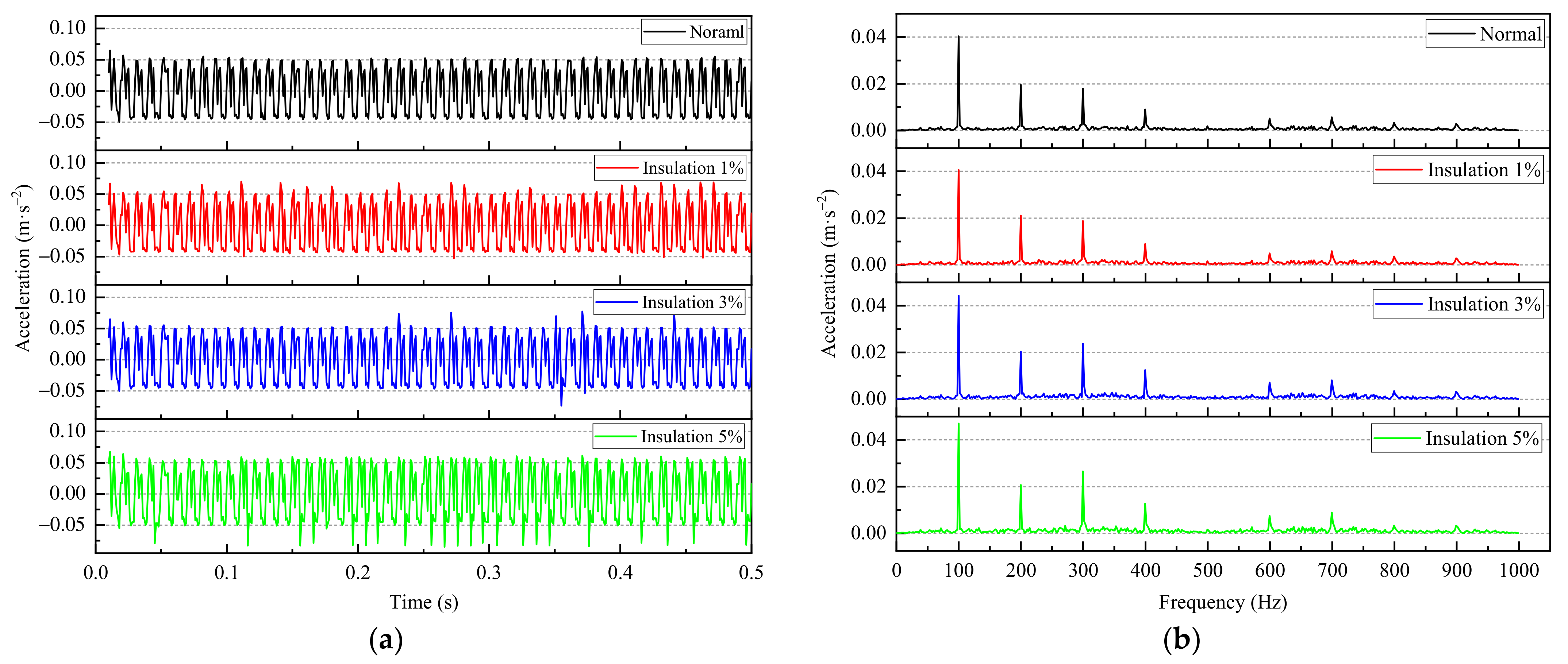
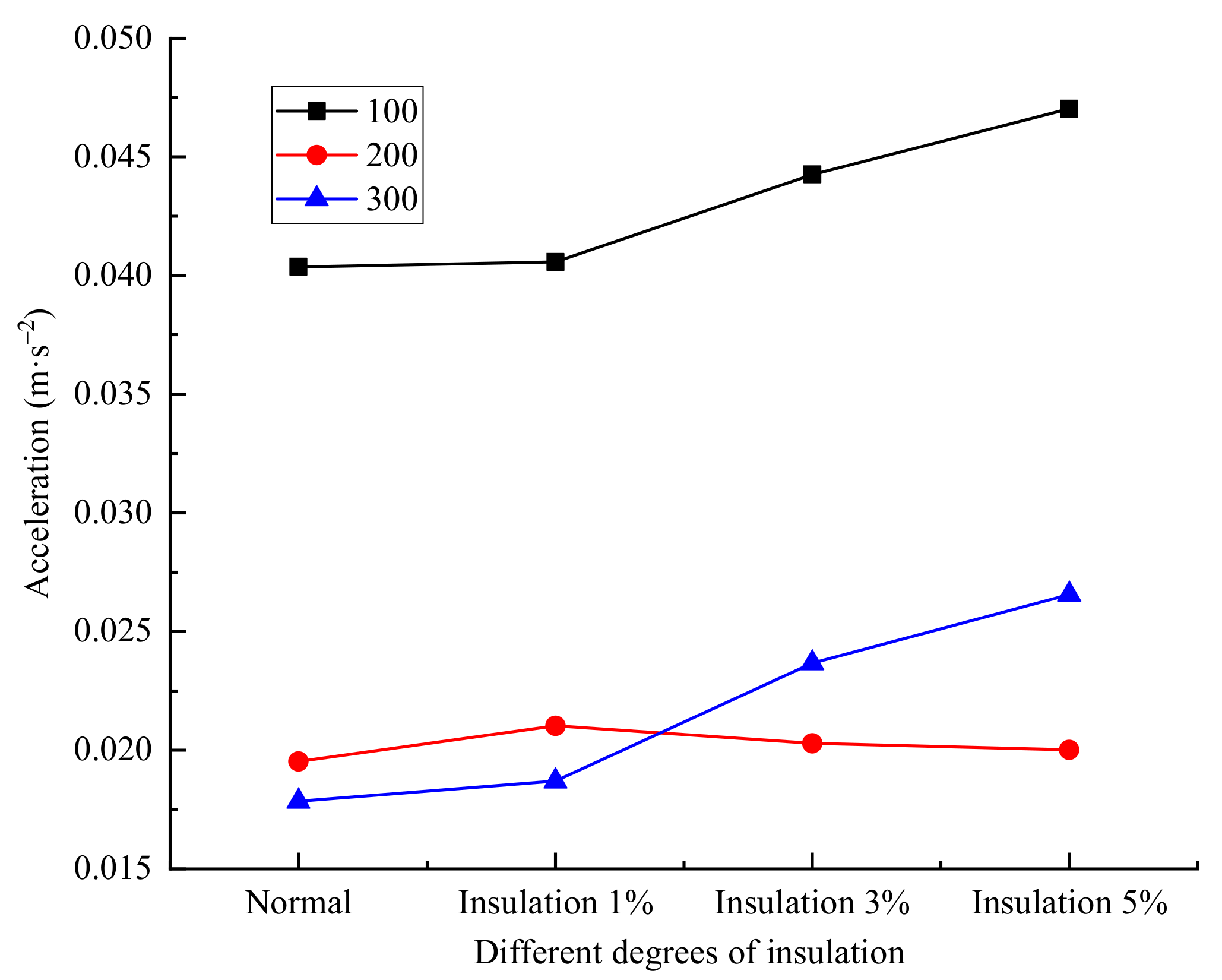
4.2. Winding Insulation Fault
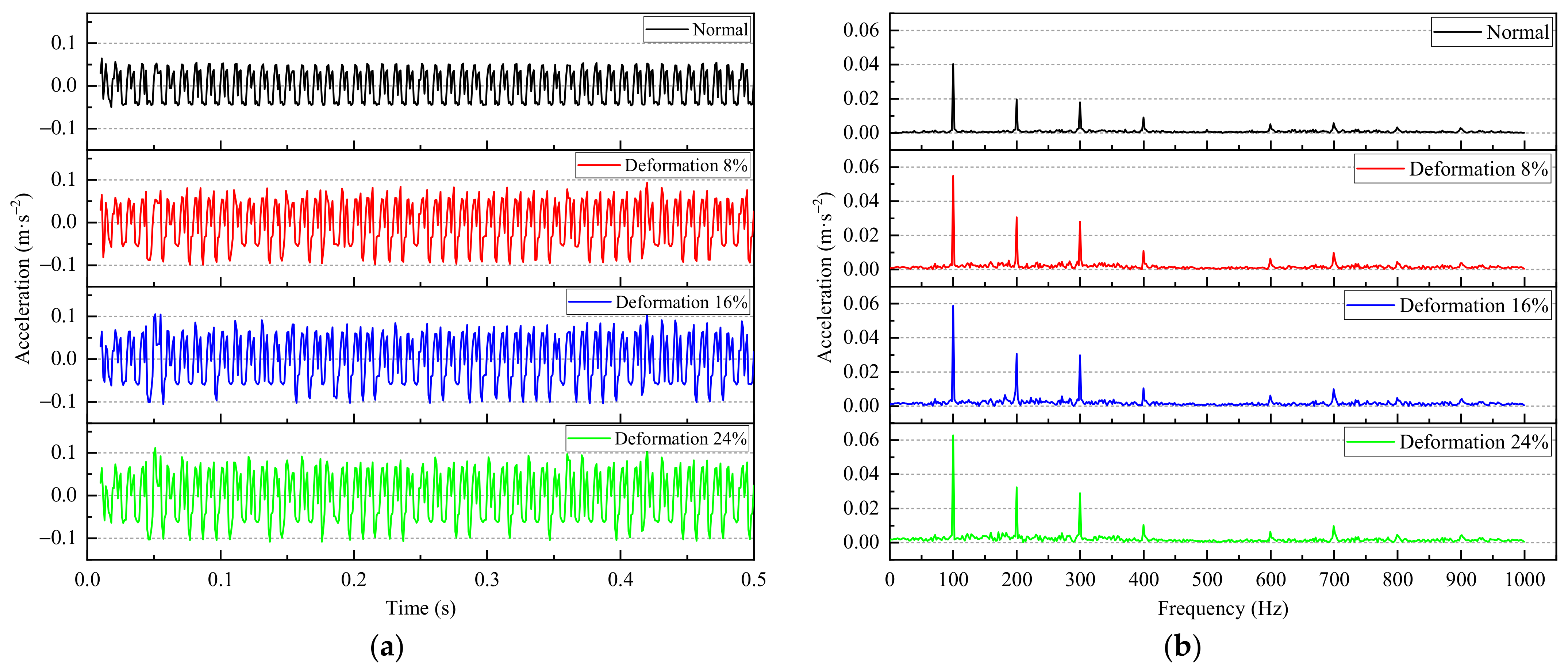
4.3. Simulation Analysis of the Winding Deformation Fault
4.4. Simulation Analysis of the Winding Eccentricity Fault
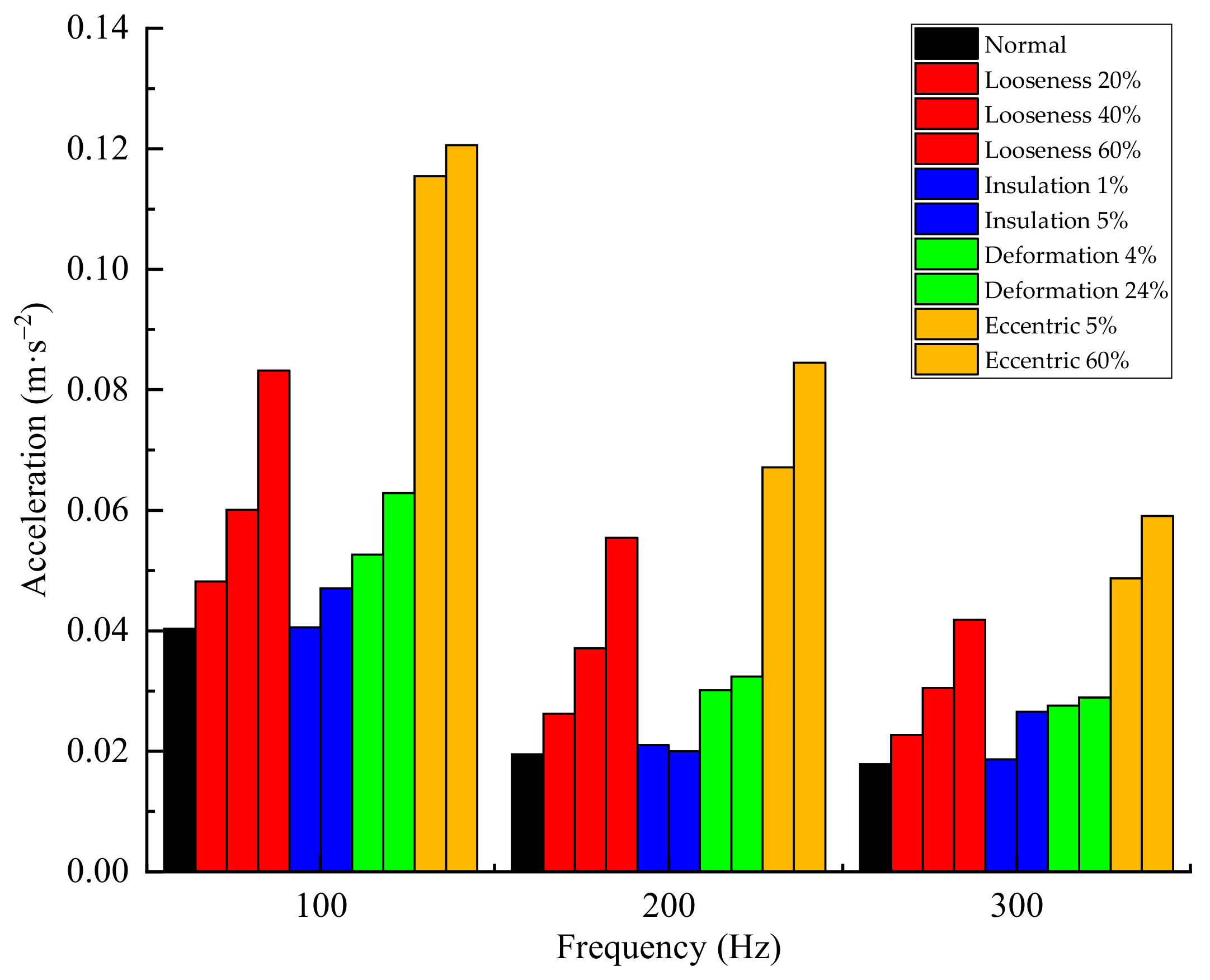
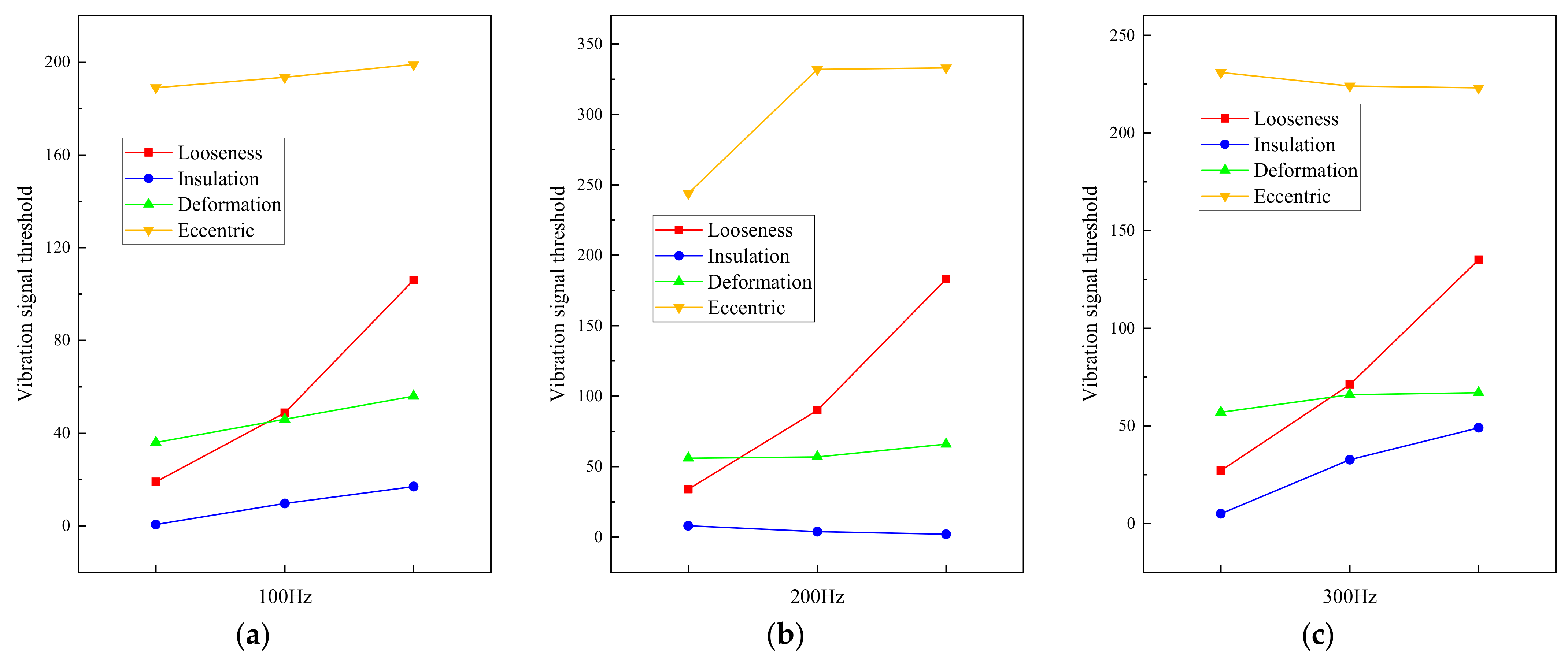
4.5. Winding Fault Identification Method
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wei, Y. Optimization design analysis of dry-type and oil immersed transformers. Sci. Technol. Commun. 2016, 8, 179–198. [Google Scholar]
- Zhang, F.; Ji, S.C.; Shi, Y.H. Study on Vibration and Propagation Characteristics of Power Transformer Winding. Chin. J. Electr. Eng. 2018, 38, 2790–2798+2849. [Google Scholar]
- Ji, S.C.; Zhang, F.; Shi, Y.H. Overview of research on mechanical state diagnosis methods of power transformers based on vibration signals. High Volt. Technol. 2020, 46, 257–272. [Google Scholar]
- Christina, A.J.; Salam, M.A.; Rahman, Q.M.; Wen, F.; Ang, S.P.; Voon, W. Causes of transformer failures and diagnostic methods-A review. Renew. Sustain. Energy Rev. 2018, 82, 1442–1456. [Google Scholar]
- Zhao, J.Y.; Xiao, W.M.; Shi, L. Noise Testing and Characteristic Analysis of Power Transformers. In The 2021 Annual Conference of Science and Technology of Chinese Academy of Environmental Sciences—Symposium on Innovation and Application of Environmental Engineering Technology (III); Industrial Construction Magazine Co., Ltd.: Beijing, China, 2021; pp. 746–749. [Google Scholar]
- Murugan, R.; Ramasamy, R. Failure analysis of power transformer for effective maintenance planning in electric utilities. Eng. Fail. Anal. 2015, 55, 182–192. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, W.F.; Tian, T. Power transformer health status assessment model considering historical operating conditions. High Volt. Appar. 2021, 57, 70–76. [Google Scholar]
- Chen, B.Y. Analysis and treatment of transformer core grounding fault. Equip. Manuf. Technol. 2010, 6, 190–191. [Google Scholar]
- Huang, L.F. Analysis and treatment of multipoint grounding fault of transformer core. J. Jiamusi Univ. Nat. Sci. Ed. 2006, 4, 563–566. [Google Scholar]
- Wang, J.D. Analysis of 220kV transformer faults and maintenance methods. Integr. Circuit Appl. 2021, 38, 206–207. [Google Scholar]
- Tang, W.F. Research on analysis and treatment of common faults in transformer maintenance. Metall. Manag. 2021, 21, 62–63. [Google Scholar]
- Moradnouri, A.; Vakilian, M.; Hekmati, A.; Fardmanesh, M. HTS Transformers Leakage Flux and Short Circuit Force Mitigation through Optimal Design of Auxiliary Windings. Cryogenics 2020, 110, 103148. [Google Scholar] [CrossRef]
- Moradnouri, A.; Vakilian, M.; Hekmati, A.; Fardmanesh, M. Optimal Design of Flux Diverter Using Genetic Algorithm for Axial Short Circuit Force Reduction in HTS Transformers. IEEE Trans. Appl. Supercond. 2020, 30, 1–8. [Google Scholar] [CrossRef]
- Moradnouri, A.; Vakilian, M.; Hekmati, A.; Fardmanesh, M. Multi-Segment Winding Application for Axial Short Circuit Force Reduction under Tap Changer Operation in HTS Transformers. J. Supercond. Nov. Magn. 2019, 32, 3171–3182. [Google Scholar] [CrossRef]
- Wu, W.J.; Cao, Y.F.; Sun, G.Q. Vibration characteristic analysis of dry-type transformer based on Ansys. Electr. Technol. 2021, 22, 1–7. [Google Scholar]
- Wu, H.; Wang, X.; Zhang, J.J. Online monitoring and diagnosis method of transformer winding deformation. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 1747–1753. [Google Scholar] [CrossRef]
- Zhang, X.B.; Chen, C.Z. Simulation of transformer winding vibration stress analysis based on ANSYS Maxwell. Mech. Eng. 2020, 9, 29–30. [Google Scholar]
- Zhang, X.J. State Identification and Vibration Characteristics of Power Transformer Winding Abstract; Shenyang University of Technology: Shenyang, China, 2021. [Google Scholar]
- Hong, K.X.; Huang, H.; Zhou, J.P. Winding condition assessment of power transformers bases on vibration correlation. IEEE Trans. Power Deliv. 2015, 30, 1735–1742. [Google Scholar] [CrossRef]
- Zhu, T.T. Research on Numerical Simulation Analysis Method of Turn to Turn Insulation Fault of Power Transformer; Hunan University: Changsha, China, 2016. [Google Scholar]
- Ji, S.C.; Zhang, F.; Qian, G.C.; Zhu, Y.Y.; Dong, H.K.; Zou, D.X. Axial vibration characteristics of transformer windings under steady-state conditions and its influencing factors. High Volt. Technol. 2016, 42, 3178–3187. [Google Scholar]
- Hu, Y.W.; Zheng, J.; Huang, J. Experimental research on power transformer vibration distribution under different winding defect conditions. Electronics 2019, 8, 842–861. [Google Scholar] [CrossRef] [Green Version]
- Venikar, P.A.; Ballal, M.S.; Umre, B.S.; Suryawanshi, H.M. Search coil based online diagnostics of transformer internal faults. IEEE Trans. Power Deliv. 2017, 32, 2520–2529. [Google Scholar] [CrossRef]
- Havrlík, M.; Libra, M.; Poulek, V.; Kouřím, P. Analysis of Output Signal Distortion of Galvanic Isolation Circuits for Monitoring the Mains Voltage Waveform. Sensors 2022, 22, 7769. [Google Scholar] [CrossRef] [PubMed]
- Ma, H.Z.; Gen, Z.H.; Chen, K.; Wang, C.N.; Li, K.; Li, Y. New vibration-based fault diagnosis method for power transformer winding deformation. Autom. Electr. Power Syst. 2013, 37, 89–95. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Technical | Parameter | Main Technical | Parameter |
|---|---|---|---|
| Transformer model | SCB10-1000 kVA | Rated frequency | 50 Hz |
| Phase number | Three-phase | Rated capacity | 1000 kVA |
| Connection mode | Dyn11 | Rated voltage | 10/0.4 kV |
| Winding turns | 591/13 | Rated current | 57.74/1443.38 A |
| Parameter | Density (kg/m3) | Poisson’s Coefficient | Modulus of Elasticity (Pa) |
|---|---|---|---|
| Iron core | 7870 | 0.29 | 2 × 1011 |
| Winding | 3200 | 0.32 | 1.16 × 1011 |
| Supporting | 1800 | 0.35 | 8 × 109 |
| Block | 2490 | 0.35 | 1.06 × 108 |
| Parameter | Normal | Looseness 20% | Looseness 40% | Looseness 60% |
|---|---|---|---|---|
| Modulus of elasticity (Pa) | 1.16 × 1011 | 9.28 × 1010 | 6.96 × 1010 | 4.64 × 1010 |
| Parameter | Normal | Insulation 1% | Insulation 3% | Insulation 5% |
|---|---|---|---|---|
| Number of turns of phase A | 591 | 585 | 573 | 561 |
| Working Condition | Looseness | Insulation | Deformation | Eccentric |
|---|---|---|---|---|
| (100 Hz) | 19~106 | 1~17 | 30~45 | 189~199 |
| (200 Hz) | 34~183 | 2~8 ↓ | 51~54 | 332~333 |
| (300 Hz) | 27~135 | 5~49 | 45~57 | 223~231 ↓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Zhang, L.; Yang, L.; Gu, C.; Wang, Z. The Identification Method of the Winding Vibration Faults of Dry-Type Transformers. Electronics 2023, 12, 3. https://doi.org/10.3390/electronics12010003
Liu S, Zhang L, Yang L, Gu C, Wang Z. The Identification Method of the Winding Vibration Faults of Dry-Type Transformers. Electronics. 2023; 12(1):3. https://doi.org/10.3390/electronics12010003
Chicago/Turabian StyleLiu, Shulian, Ling Zhang, Likang Yang, Cunkai Gu, and Zaihua Wang. 2023. "The Identification Method of the Winding Vibration Faults of Dry-Type Transformers" Electronics 12, no. 1: 3. https://doi.org/10.3390/electronics12010003