
An Enhanced LBPH Approach to Ambient-Light-Affected Face Recognition Data in Sensor Network

 , and
, and
Abstract
:1. Introduction
2. Research Materials
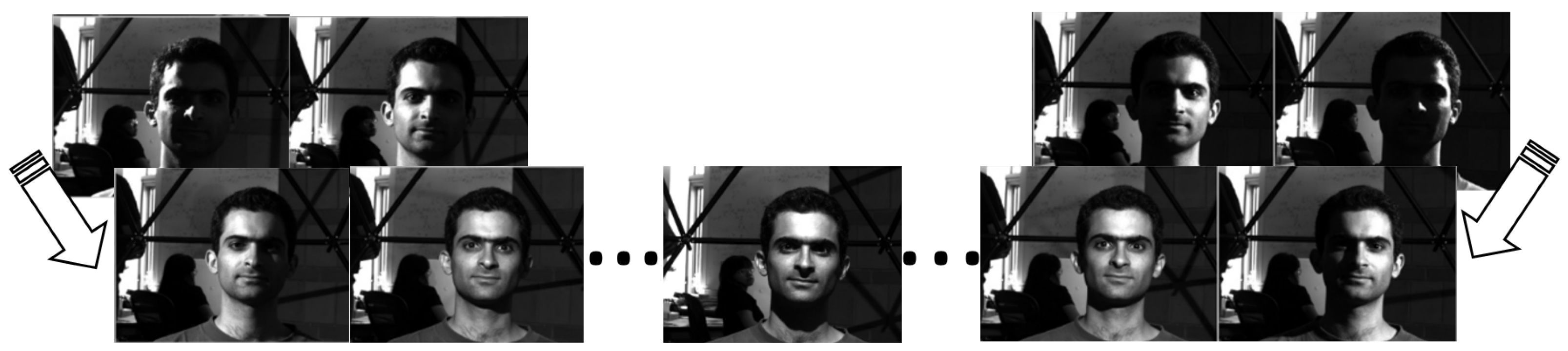
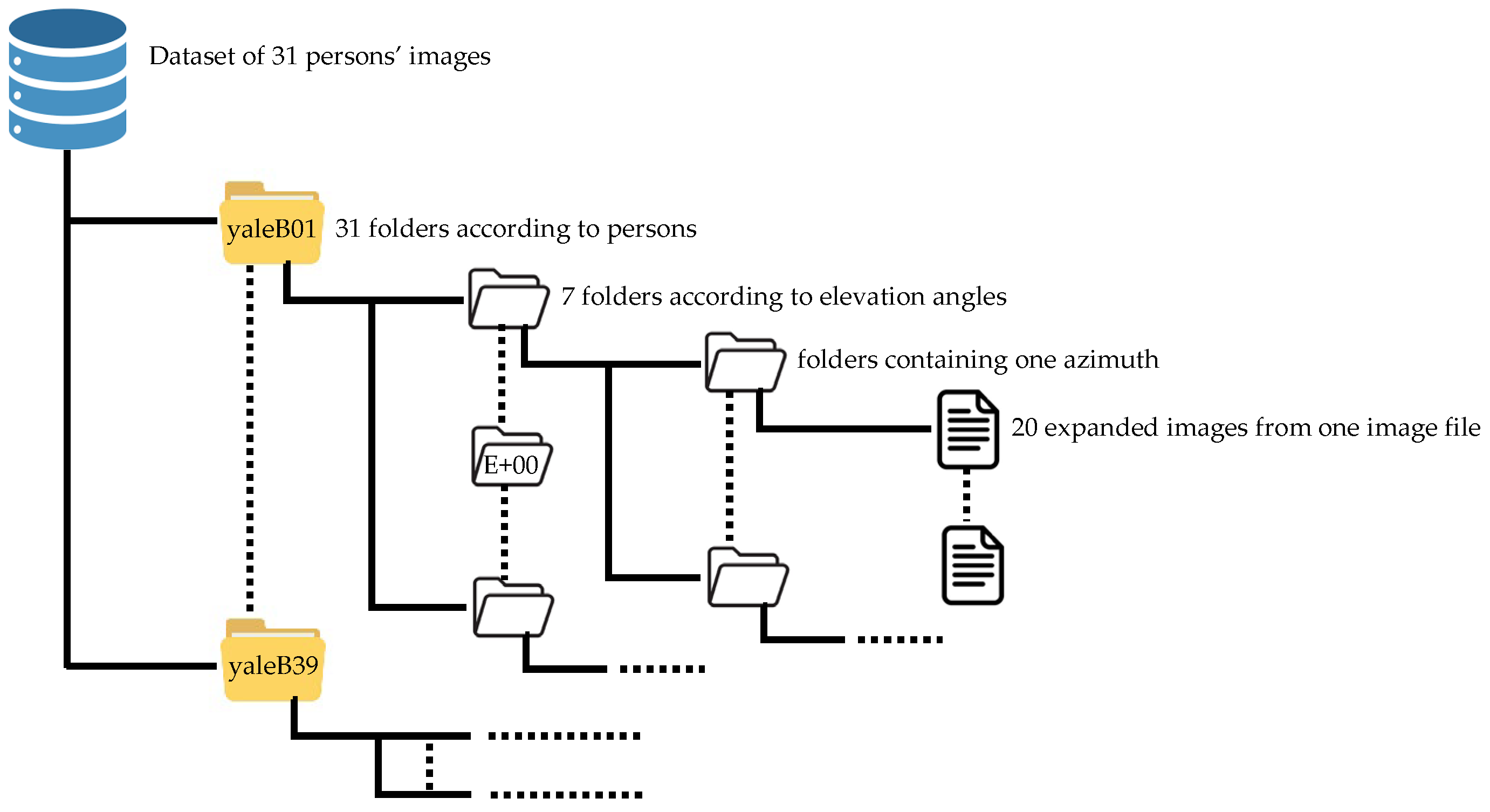
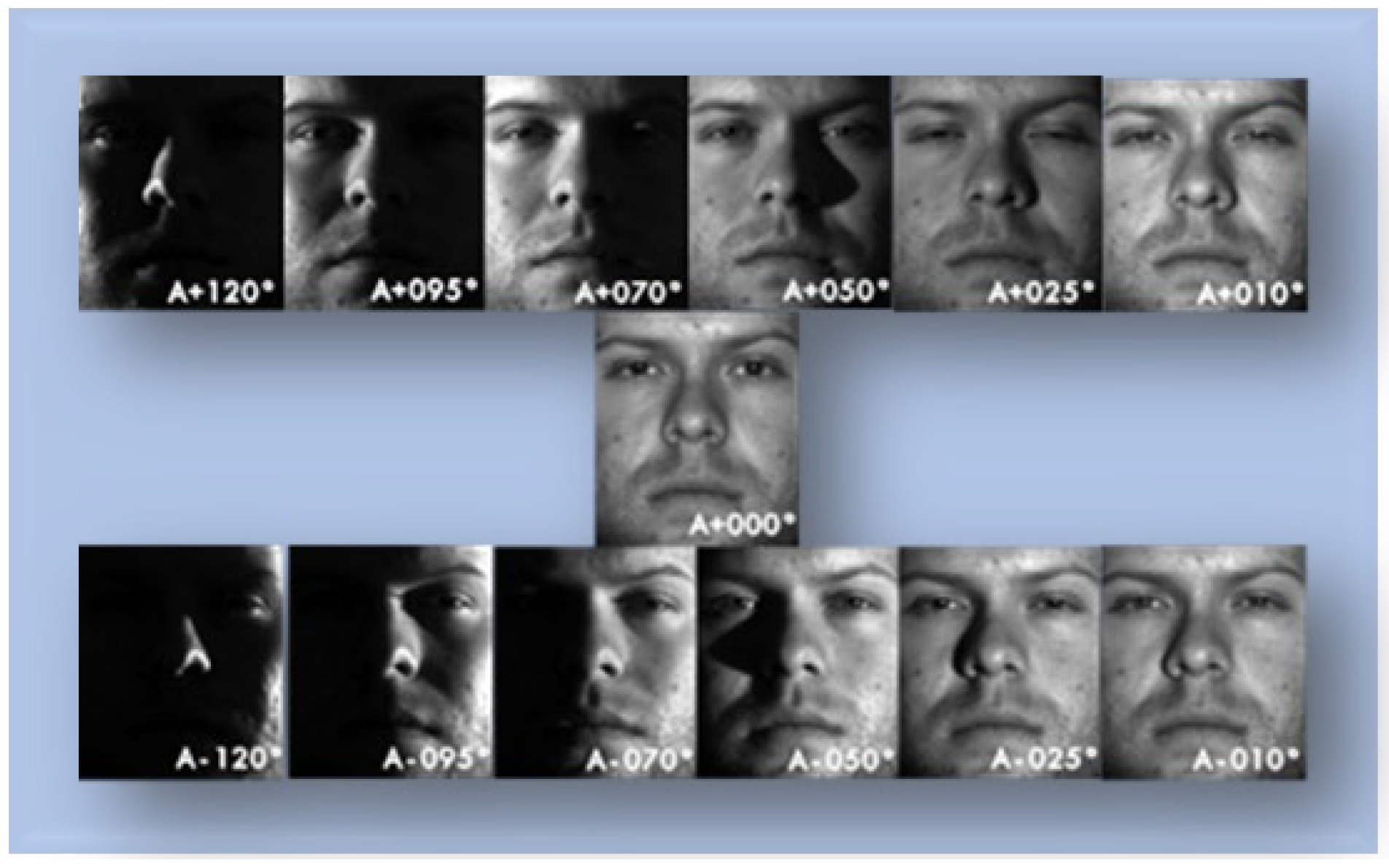
2.1. Data Set
2.2. Google Colaboratory
2.3. Python Libraries
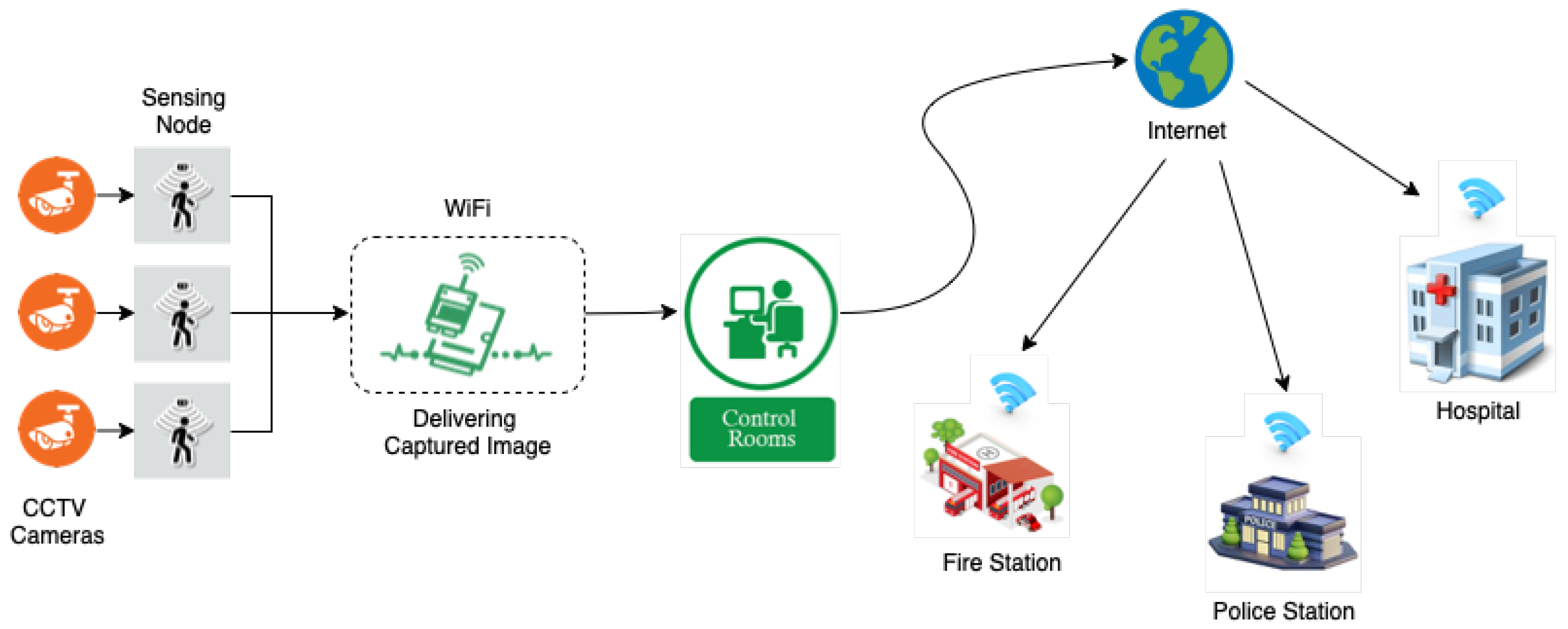
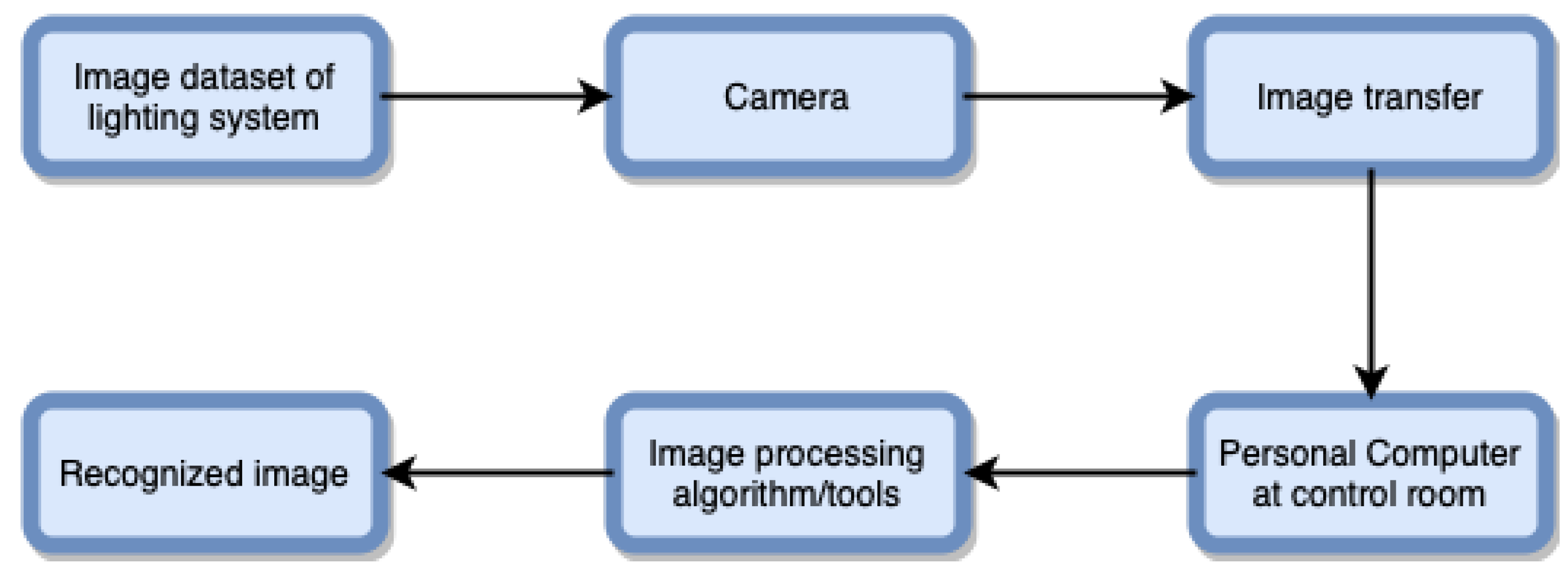
2.4. Data Transfer
3. Experiment Methods
3.1. LBPH: Face Recognition Algorithm
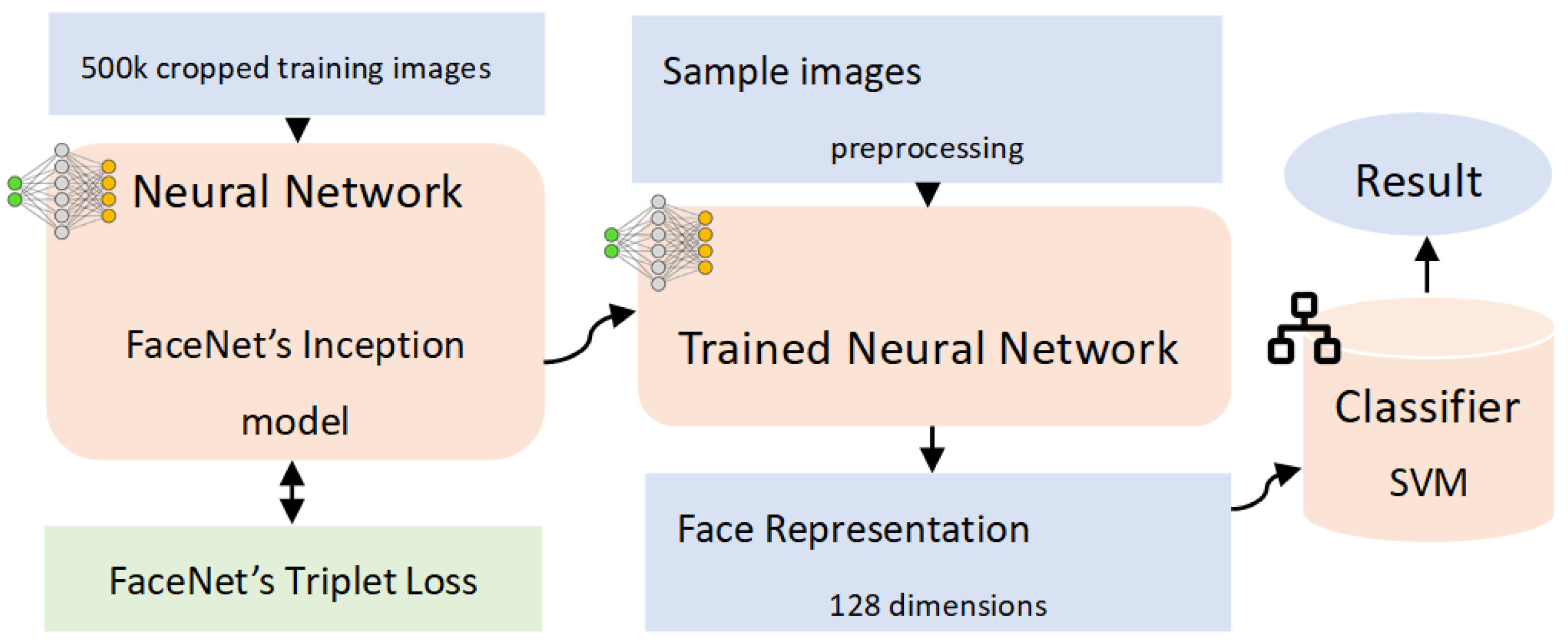
3.2. OpenFace: Face Recognition Algorithm
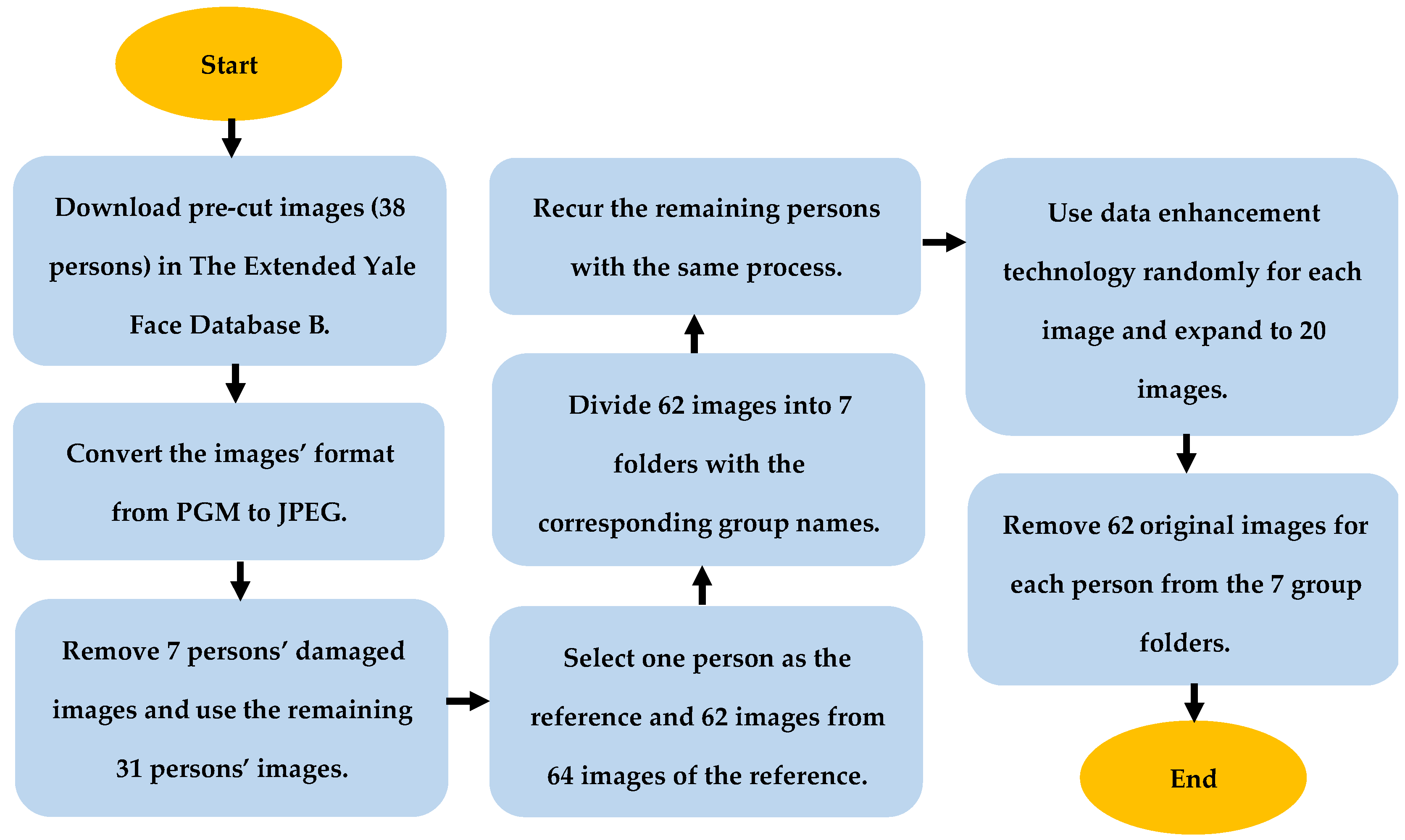
3.3. Data Pre-Processing
3.4. Data Set Split
3.5. LBPH Model Training
3.6. OpenFace Model Training
3.7. LBPH Prediction Image
3.8. OpenFace Prediction Image
3.9. Statistics and Visualization
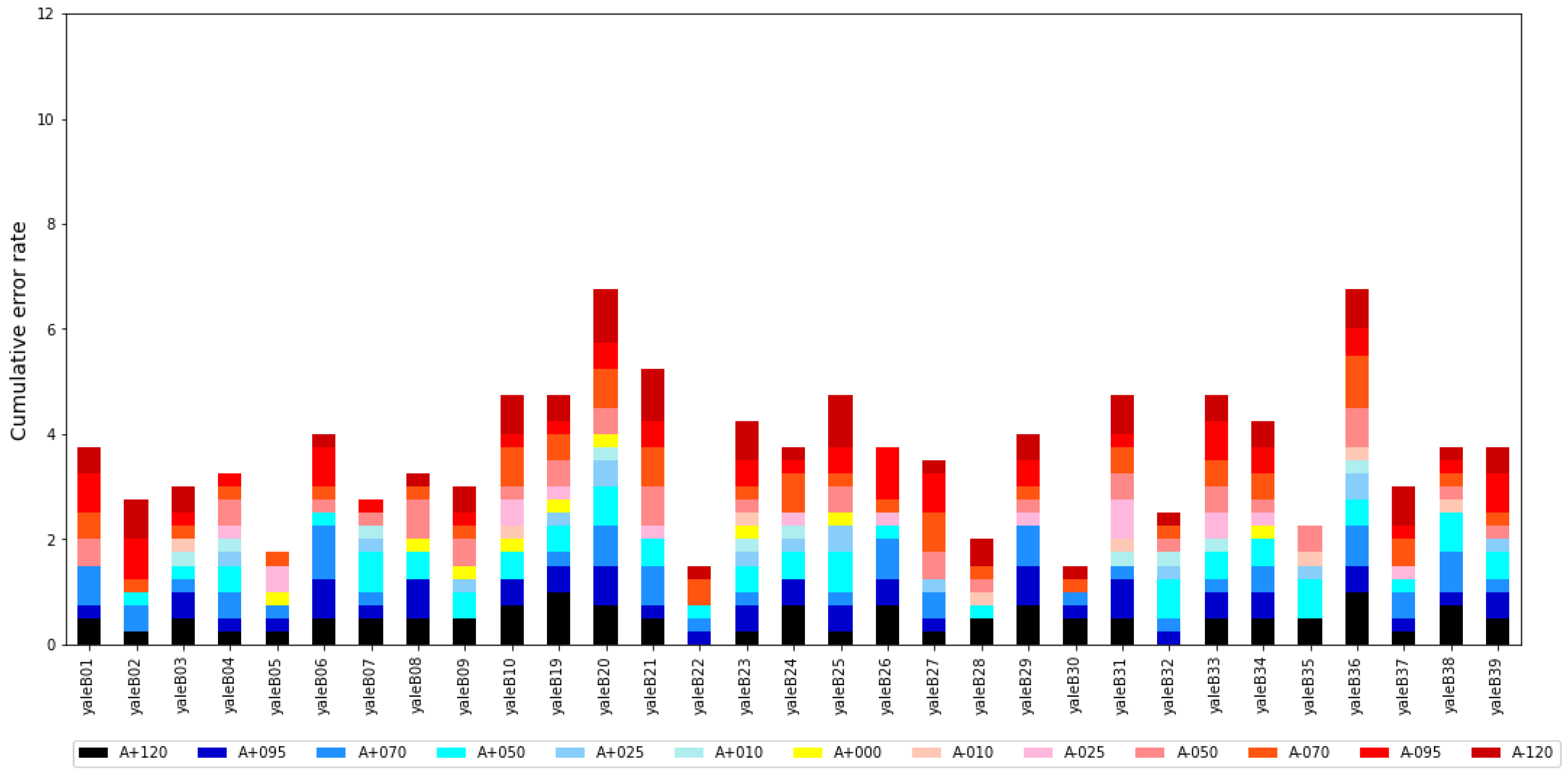
4. Experimental Results
5. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abd Al Rahman, M.; Mousavi, A. A review and analysis of automatic optical inspection and quality monitoring methods in electronics industry. IEEE Access 2020, 8, 183192–183271. [Google Scholar] [CrossRef]
- Adini, Y.; Moses, Y.; Ullman, S. Face recognition: The problem of compensating for changes in illumination direction. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 721–732. [Google Scholar] [CrossRef] [Green Version]
- Alshamsi, H.; Meng, H.; Li, M. Real time facial expression recognition app development on mobile phones. In Proceedings of the 2016 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Changsha, China, 3–15 August 2016; pp. 1750–1755. [Google Scholar]
- Huang, T.; Xiong, Z.; Zhang, Z. Face Recognition Applications. In Handbook of Face Recognition; Springer: Berlin/Heidelberg, Germany, 2005; pp. 371–390. [Google Scholar]
- Wheeler, F.W.; Weiss, R.L.; Tu, P.H. Face recognition at a distance system for surveillance applications. In Proceedings of the 2010 Fourth IEEE International Conference on Biometrics: Theory, Applications and Systems (BTAS), Washington, DC, USA, 27–29 September 2010; pp. 1–8. [Google Scholar]
- Pahuja, N. Smart Cities and Infrastructure Standardization Requirements. In Solving Urban Infrastructure Problems Using Smart City Technologies; Elsevier: Amsterdam, The Netherlands, 2021; pp. 331–357. [Google Scholar]
- Ijaz Ul Haq, K.M.; Sajjad, M.; Lee, M.Y.; Han, D.; Baik, S.W. A Study of Data Dissemination in CCTV Surveillance Systems. Image 2016, 75, 14867–14893. [Google Scholar]
- Mittal, A.; Davis, L.S. Visibility Analysis and Sensor Planning in Dynamic Environments. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2004; pp. 175–189. [Google Scholar]
- Meesookho, C.; Narayanan, S.; Raghavendra, C. Collaborative classification applications in sensor networks. In Proceedings of the Sensor Array and Multichannel Signal Processing Workshop Proceedings, Trondheim, Norway, 20–23 June 2002; pp. 370–374. [Google Scholar]
- Mainwaring, A.; Culler, D.; Polastre, J.; Szewczyk, R.; Anderson, J. Wireless sensor networks for habitat monitoring. In Proceedings of the 1st ACM International Workshop on WIRELESS Sensor Networks and Applications, Atlanta, GA, USA, 28 September 2002; pp. 88–97. [Google Scholar]
- Williams, A.; Ganesan, D.; Hanson, A. Aging in place: Fall detection and localization in a distributed smart camera network. In Proceedings of the 15th ACM International Conference on Multimedia, New York, NY, USA, 24–29 September 2007; pp. 892–901. [Google Scholar]
- Zhu, X.; Ding, B.; Li, W.; Gu, L.; Yang, Y. On development of security monitoring system via wireless sensing network. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 221. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Chellappa, R.; Phillips, P.J.; Rosenfeld, A. Face recognition: A literature survey. ACM Comput. Surv. (CSUR) 2003, 35, 399–458. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, Y.; Lades, M. Face recognition: Eigenface, elastic matching, and neural nets. Proc. IEEE 1997, 85, 1423–1435. [Google Scholar] [CrossRef]
- Belhumeur, P.N.; Hespanha, J.P.; Kriegman, D.J. Eigenfaces vs. fisherfaces: Recognition using class specific linear projection. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 711–720. [Google Scholar] [CrossRef] [Green Version]
- Ahonen, T.; Hadid, A.; Pietikäinen, M. Face Recognition with Local Binary Patterns. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2004; pp. 469–481. [Google Scholar]
- Liu, W.; Wang, Z.; Liu, X.; Zeng, N.; Liu, Y.; Alsaadi, F.E. A survey of deep neural network architectures and their applications. Neurocomputing 2017, 234, 11–26. [Google Scholar] [CrossRef]
- Lawrence, S.; Giles, C.L.; Tsoi, A.C.; Back, A.D. Face recognition: A convolutional neural-network approach. IEEE Trans. Neural Netw. 1997, 8, 98–113. [Google Scholar] [CrossRef] [Green Version]
- Tan, X.; Triggs, B. Enhanced local texture feature sets for face recognition under difficult lighting conditions. IEEE Trans. Image Process. 2010, 19, 1635–1650. [Google Scholar]
- Howse, J. Training Detectors and Recognizers in Python and OpenCVn. In Proceedings of the 2014 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Munich, Germany, 10–12 September 2014; IEEE Computer Society: Washington, DC, USA, 2014; pp. 1–2. [Google Scholar]
- Shoba, V.B.T.; Sam, I.S. Face recognition using LBPH descriptor and convolution neural network. In Proceedings of the 2018 Second International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 14–15 June 2018; pp. 1439–1444. [Google Scholar]
- Mondal, I.; Chatterjee, S. Secure and hassle-free EVM through deep learning based face recognition. In Proceedings of the 2019 International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon), Faridabad, India, 14–16 February 2019; pp. 109–113. [Google Scholar]
- Zhuang, L.; Guan, Y. Deep learning for face recognition under complex illumination conditions based on log-gabor and LBP. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 May 2019; pp. 1926–1930. [Google Scholar]
- Soo, S. Object detection using Haar-cascade Classifier. Inst. Comput. Sci. Univ. Tartu 2014, 2, 1–12. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–26 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Schroff, F.; Kalenichenko, D.; Philbin, J. Facenet: A unified embedding for face recognition and clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 815–823. [Google Scholar]
- Amos, B.; Ludwiczuk, B.; Satyanarayanan, M. Openface: A general-purpose face recognition library with mobile applications. CMU Sch. Comput. Sci. 2016, 6, 20. [Google Scholar]
- Baltrusaitis, T.; Zadeh, A.; Lim, Y.C.; Morency, L.-P. Openface 2.0: Facial behavior analysis toolkit. In Proceedings of the 2018 13th IEEE International Conference on Automatic Face & Gesture Recognition (FG 2018), Xi’an, China, 15–18 May 2018; pp. 59–66. [Google Scholar]
- Diego, U.o.C.S. The Extended Yale Face Database B. Available online: http://vision.ucsd.edu/~leekc/ExtYaleDatabase/ExtYaleB.html (accessed on 30 September 2020).
- Georghiades, A.S.; Belhumeur, P.N.; Kriegman, D.J. From few to many: Illumination cone models for face recognition under variable lighting and pose. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 643–660. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.-C.; Ho, J.; Kriegman, D.J. Acquiring linear subspaces for face recognition under variable lighting. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 684–698. [Google Scholar] [PubMed]
- Zhou, Z.; Wu, C.; Yang, Z.; Liu, Y. Sensorless sensing with WiFi. Tsinghua Sci. Technol. 2015, 20, 1–6. [Google Scholar] [CrossRef]
- Kirkpatrick, K. World Without Wires; ACM: New York, NY, USA, 2014. [Google Scholar]
- Yu, Y.; Han, F.; Bao, Y.; Ou, J. A study on data loss compensation of WiFi-based wireless sensor networks for structural health monitoring. IEEE Sens. J. 2015, 16, 3811–3818. [Google Scholar] [CrossRef]
- Testa, A.; Cinque, M.; Coronato, A.; De Pietro, G.; Augusto, J.C. Heuristic strategies for assessing wireless sensor network resiliency: An event-based formal approach. J. Heuristics 2015, 21, 145–175. [Google Scholar] [CrossRef] [Green Version]
- Zanjani, P.N.; Bahadori, M.; Hashemi, M. Monitoring and remote sensing of the street lighting system using computer vision and image processing techniques for the purpose of mechanized blackouts (development phase). In Proceedings of the IET Digital Library of 22nd International Conference and Exhibition on Electricity Distribution (CIRED 2013), 10–13 June 2013; Stockholm, Sweden. [Google Scholar]
- Farhat, A.; Guyeux, C.; Makhoul, A.; Jaber, A.; Tawil, R.; Hijazi, A. Impacts of wireless sensor networks strategies and topologies on prognostics and health management. J. Intell. Manuf. 2019, 30, 2129–2155. [Google Scholar] [CrossRef] [Green Version]
- Younis, M.; Senturk, I.F.; Akkaya, K.; Lee, S.; Senel, F. Topology management techniques for tolerating node failures in wireless sensor networks: A survey. Comput. Netw. 2014, 58, 254–283. [Google Scholar] [CrossRef]
- Li, M.; Li, Z.; Vasilakos, A.V. A survey on topology control in wireless sensor networks: Taxonomy, comparative study, and open issues. Proc. IEEE 2013, 101, 2538–2557. [Google Scholar] [CrossRef]
- Gupta, N.; Kumar, N.; Jain, S. Coverage problem in wireless sensor networks: A survey. In Proceedings of the 2016 International Conference on Signal Processing, Communication, Power and Embedded System (SCOPES), Odisha, India, 3–5 October 2016; pp. 1742–1749. [Google Scholar]
- Liang, D.; Shen, H.; Chen, L. Maximum target coverage problem in mobile wireless sensor networks. Sensors 2020, 21, 184. [Google Scholar] [CrossRef] [PubMed]
- Chang, R.-S.; Wang, S.-H. Deployment strategies for wireless sensor networks. In Handbook of Research on Developments and Trends in Wireless Sensor Networks: From Principle to Practice; IGI Global: Hershey, PA, USA, 2010; pp. 20–37. [Google Scholar]
- Cheng, H.; Su, Z.; Lloret, J.; Chen, G. Service-oriented node scheduling scheme for wireless sensor networks using Markov random field model. Sensors 2014, 14, 20940–20962. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, H.; Li, X.; Zhao, F. A reinforcement learning-based sleep scheduling algorithm for desired area coverage in solar-powered wireless sensor networks. IEEE Sens. J. 2016, 16, 2763–2774. [Google Scholar] [CrossRef]
- Darabkh, K.A.; Odetallah, S.M.; Al-qudah, Z.; Ala’F, K.; Shurman, M.M. Energy-aware and density-based clustering and relaying protocol (EA-DB-CRP) for gathering data in wireless sensor networks. Appl. Soft Comput. 2019, 80, 154–166. [Google Scholar] [CrossRef]
- Ahmed, M.H.; Alam, S.W.; Qureshi, N.; Baig, I. Security for WSN based on elliptic curve cryptography. In Proceedings of the International Conference on Computer Networks and Information Technology, Abbottabad, Pakistan, 11–13 July 2011; pp. 75–79. [Google Scholar]
- Khan, M.A.; Khan, J.; Sehito, N.; Mahmood, K.; Ali, H.; Bari, I.; Arif, M.; Ghoniem, R.M. An Adaptive Enhanced Technique for Locked Target Detection and Data Transmission over Internet of Healthcare Things. Electronics 2022, 11, 2726. [Google Scholar] [CrossRef]
- Ozdemir, S.; Xiao, Y. Secure data aggregation in wireless sensor networks: A comprehensive overview. Comput. Netw. 2009, 53, 2022–2037. [Google Scholar] [CrossRef]
- OpenFace. Models and Accuracies. Available online: https://cmusatyalab.github.io/openface/models-and-accuracies/ (accessed on 18 September 2022).
- Massachusetts, U.O. Labeled Faces in the Wild. Available online: http://vis-www.cs.umass.edu/lfw/ (accessed on 18 September 2022).
- Jacob, M.P. Comparison of popular face detection and recognition techniques. Int. Res. J. Mod. Eng. Technol. Sci. e-ISSN 2021, 3, 2582–5208. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Library | purpose |
| opencv | image processing, LBPH face recognition |
| imutils | image processing (package opencv part of the API) |
| keras | data enhancement |
| numpy | array and matrix operations |
| sklearn | machine learning |
| pickle | object serialization and deserialization |
| sqlite3 | database operations |
| matplotlib | visualized graphics presentation |
| Work | Metrics | Result |
|---|---|---|
| Topology management techniques for tolerating node failures in wireless sensor networks: A survey [38] | Topology | This research examined network topology management approaches for tolerating node failures in WSNs, categorizing them into two major categories based on reactive and proactive approaches. |
| A survey on topology control in wireless sensor networks: Taxonomy, comparative study, and open issues [39] | Existing topology control strategies were classified into two categories in this study: network connectivity and network coverage. Spikes of existing protocols and techniques were offered for each area, with a focus on barrier coverage, blanket coverage, sweep coverage, power control, and power management. | |
| Coverage problem in wireless sensor networks: A survey [40] | Coverage | To obtain significant results, the integration of both coverage and connectivity was required. |
| Maximum target coverage problem in mobile wireless sensor network [41] | The Maximum Target Coverage with Limited Mobile (MTCLM) COLOUR algorithm performed well when the target density was low. | |
| Deployment strategies for wireless sensor networks [42] | Deployment | The deployment affected the efficiency and the effectiveness of sensor networks. |
| Service-oriented node scheduling scheme for wireless sensor networks using Markov random field model [43] | Scheduling | A new MRF-based multi-service node scheduling (MMNS) method revealed that the approach efficiently extended network lifetime. |
| A reinforcement learning-based sleep scheduling (RLSSC) algorithm for desired area coverage in solar-powered wireless sensor networks [44] | The results revealed that RLSSC could successfully modify the working mode of nodes in a group by recognizing the environment and striking a balance of energy consumption across nodes to extend the network’s life, while keeping the intended range. | |
| Energy-aware and density-based clustering and relaying protocol (EA-DB-CRP) for gathering data in wireless sensor networks [45] | Density | A proposed energy-aware and density-based clustering and routing protocol (EA-DB-CRP) had a significant impact on network lifetime and energy utilization when compared to other relevant studies. |
| Security for WSN based on elliptic curve cryptography [46] | Security | The installation of the 160-bit ECC processor on the Xilinx Spartan 3an FPGA met the security requirements of sensor network designed to achieve speed in 32-bit numerical computations. |
| An Adaptive Enhanced Technique for Locked Target Detection and Data Transmission over Internet of Healthcare Things [47] | Color and gray-scale image with varied text sizes, combined with encryption algorithms (AES and RSA), gave superior outcomes in a hybrid security paradigm for data protection diagnostic text. | |
| Secure data aggregation in wireless sensor networks [48] | Data aggregation | The study presented a thorough examination of the notion of secure data aggregation in wireless sensor networks, focusing on the relationship between data aggregation and its security needs. |
| Group Name | Image Name |
|---|---|
| A+120--120E+00 | yaleB01_P00A+000E+00 yaleB01_P00A+010E+00 yaleB01_P00A+025E+00 yaleB01_P00A+050E+00 yaleB01_P00A+070E+00 yaleB01_P00A+095E+00 yaleB01_P00A+120E+00 yaleB01_P00A-010E+00 yaleB01_P00A-025E+00 yaleB01_P00A-050E+00 yaleB01_P00A-070E+00 yaleB01_P00A-095E+00 yaleB01_P00A-120E+00 |
| Item | Number of Sheets | Number of Images |
|---|---|---|
| Training set | 31 people × 62 sheets × 20 sheets × 0.8 | 30,752 |
| Test set | 31 people × 62 sheets × 20 sheets × 0.2 | 7688 |
| Total | 31 people × 62 sheets × 20 sheets | 38,440 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.-C.; Liao, Y.-S.; Shen, H.-Y.; Syamsudin, M.; Shen, Y.-C. An Enhanced LBPH Approach to Ambient-Light-Affected Face Recognition Data in Sensor Network. Electronics 2023, 12, 166. https://doi.org/10.3390/electronics12010166
Chen Y-C, Liao Y-S, Shen H-Y, Syamsudin M, Shen Y-C. An Enhanced LBPH Approach to Ambient-Light-Affected Face Recognition Data in Sensor Network. Electronics. 2023; 12(1):166. https://doi.org/10.3390/electronics12010166
Chicago/Turabian StyleChen, Yeong-Chin, Yi-Sheng Liao, Hui-Yu Shen, Mariana Syamsudin, and Yueh-Chun Shen. 2023. "An Enhanced LBPH Approach to Ambient-Light-Affected Face Recognition Data in Sensor Network" Electronics 12, no. 1: 166. https://doi.org/10.3390/electronics12010166