
An Improved Phase Deviation Discriminator for Carrier Synchronization of APSK Signal in Satellite-to-Ground Communication Systems


Abstract
:1. Introduction
2. System Model and Problem Formulation
2.1. System Model
2.2. Problem Formulation
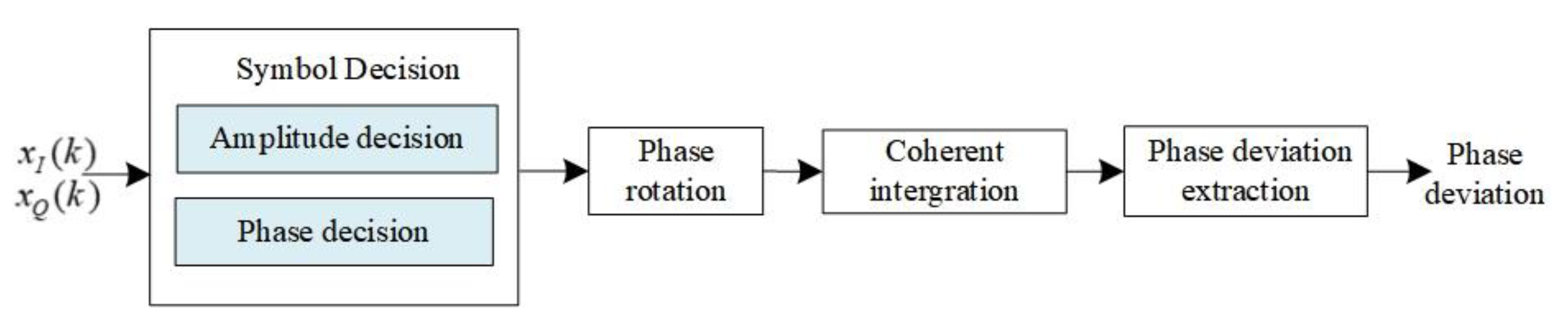
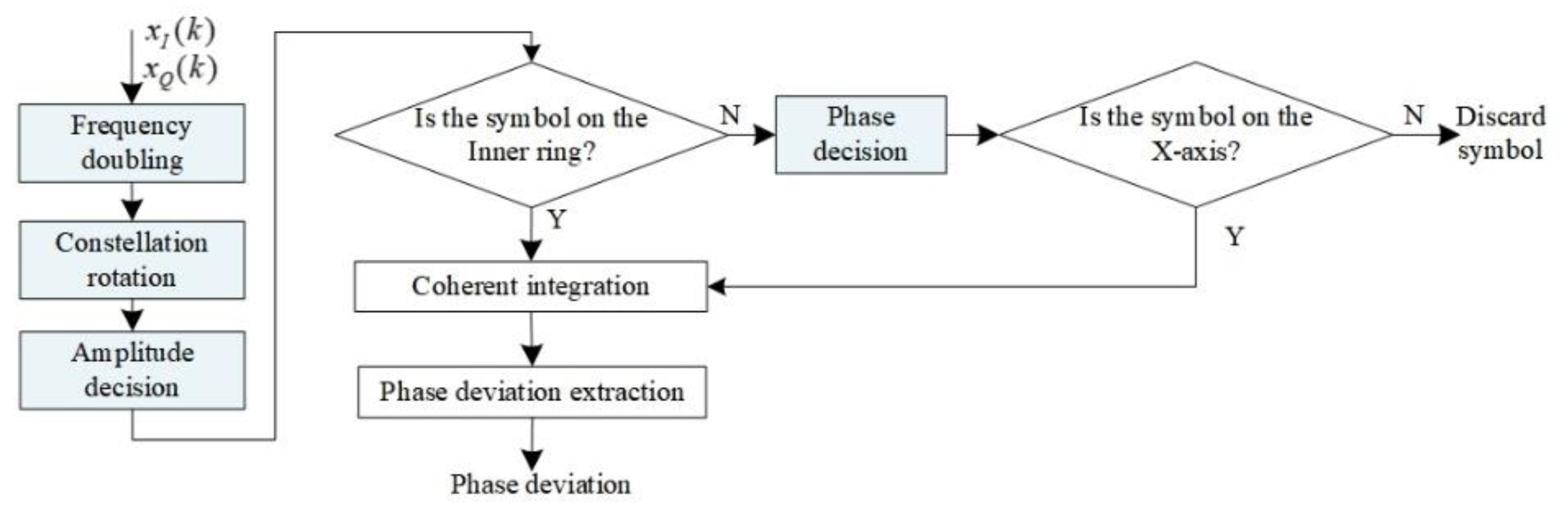
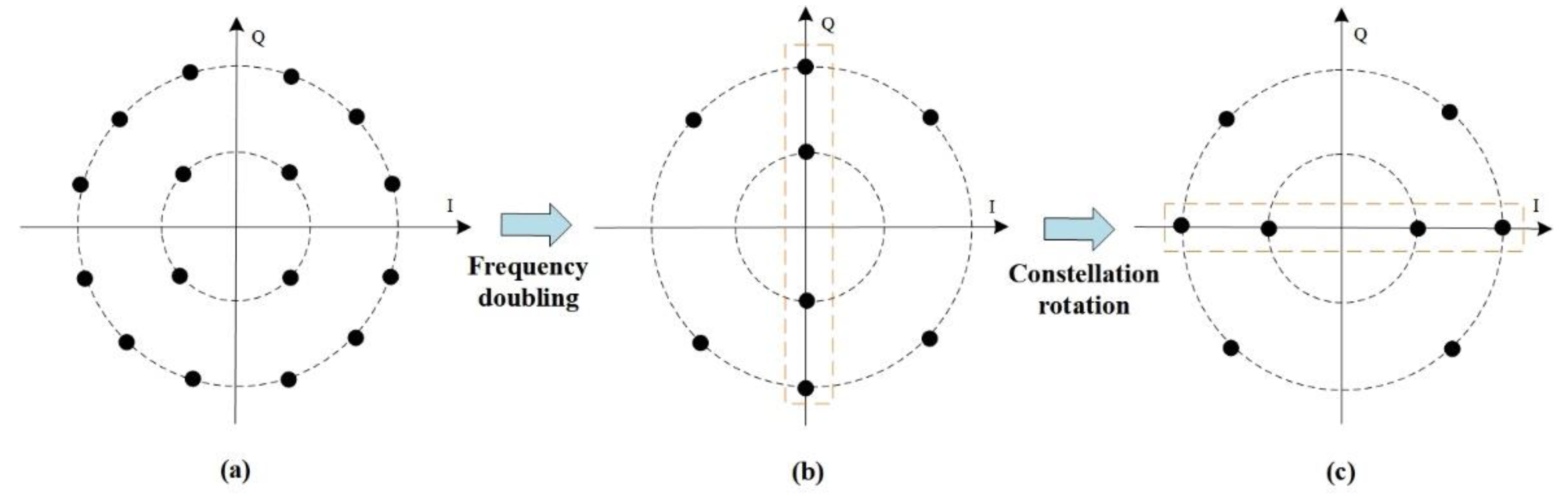
3. Methodology
4. Simulation Results
4.1. BER Simulation
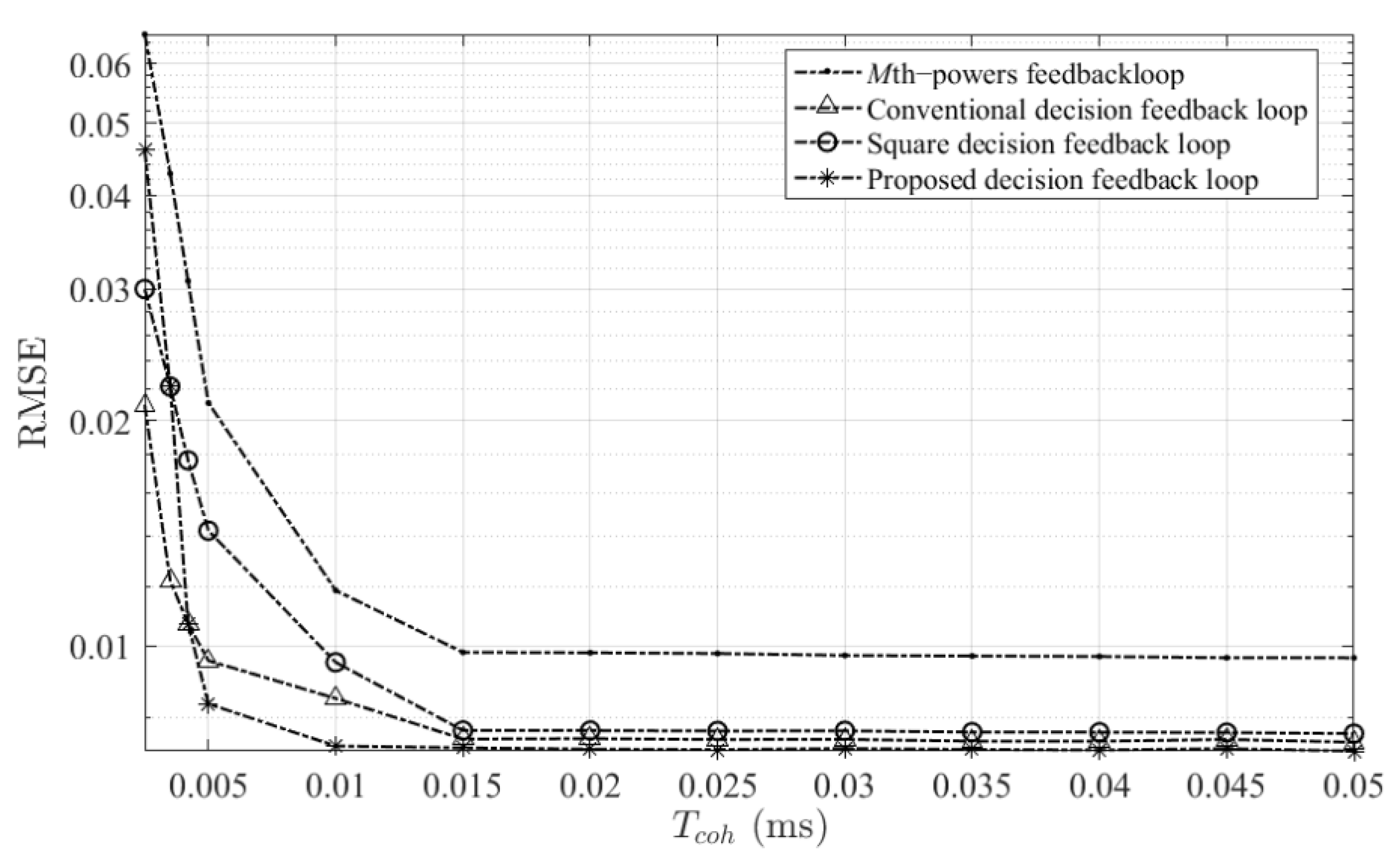
4.2. RMSE Simulation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| APSK | Amplitude phase shift keying |
| BER | Bit error rate |
| DVB | digital video broadcasting |
| LPF | Low-pass filter |
| ML | Maximum likelihood |
| PLL | Phase-locked Loop |
| RMSE | Root Mean Square Error |
| SNR | Signal to noise ratio |
| VCO | Voltage controlled oscillator |
References
- Hou, Z.; Yi, X.; Zhang, Y.; Kuang, Y.; Zhao, Y. Satellite-Ground Link Planning for LEO Satellite Navigation Augmentation Networks. IEEE Access 2019, 7, 98715–98724. [Google Scholar] [CrossRef]
- Cai, G.; Zhang, L. Satellite-to-ground communication decision system based on knowledge graph. J. Phys. Conf. Ser. 2021, 1856, 012060. [Google Scholar] [CrossRef]
- Meric, H. Approaching the Gaussian channel capacity with APSK constellations. IEEE Commun. Lett. 2015, 19, 1125–1128. [Google Scholar] [CrossRef] [Green Version]
- Afelumo, A.B.; Awoseyila, B.G. Evans. Simplified evaluation of APSK error performance. Electron. Lett. 2012, 48, 886–888. [Google Scholar] [CrossRef] [Green Version]
- Wang, A.; Dong, W.; Shen, Y. The algorithm for deep-space weak signal tracking using a modifified Kalman fifilter. In Proceedings of the 2011 7th International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 23–25 September 2011; pp. 1–4. [Google Scholar]
- Kandeepan, S. Steady state distribution of a hyperbolic digital tanlock loop with extended pull-in range for frequency synchronization in high Doppler environment. IEEE Trans. Wireless Commun. 2009, 8, 890–897. [Google Scholar] [CrossRef]
- Zhang, R.Y.; Zhan, Y.F.; Lu, J.H. A new algorithm for main carrier acquisition in deep space communication. J. Electron. 2011, 28, 169–173. [Google Scholar] [CrossRef]
- Hu, W.; Wang, Z.; Mei, R.; Lin, M. An Efficient Carrier Synchronization Scheme for Demodulation Systems. Electronics 2021, 10, 2942. [Google Scholar] [CrossRef]
- Wadhwa, A.; Madhow, U. Near-Coherent QPSK Performance With Coarse Phase Quantization: A Feedback-Based Architecture for Joint Phase/Frequency Synchronization and Demodulation. IEEE Trans. Signal Process. 2016, 64, 4432–4443. [Google Scholar] [CrossRef]
- Jiang, W.; Cui, Y. Performance Analysis of MPSK Phase Detectors for Carrier Synchronization PLLs at Low SNRs. IEEE Commun. Lett. 2014, 18, 2133–2136. [Google Scholar] [CrossRef]
- Chiou, T.Y.; Gebre-Egziabher, D.; Walter, T.; Enge, P. Model Analysis on the Performance for an Inertial Aided FLL-Assisted-PLL Carrier Tracking Loop in the Presence of Ionospheric Scintillation. In Proceedings of the Institute of Navigation National Technical Meeting, San Diego, CA, USA, 22–24 January 2007. [Google Scholar]
- Hui, Z.; Li, J. Design of PLL in the Carrier Tracking of Galileo Short-time Search and Rescue Burst Signal. J. Telem. Track. Command. 2008, 29, 46–49. [Google Scholar]
- Proakis, J.G. Digital Communications, 5th ed.; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Simon, M.; Lindsey, W. Optimum Performance of Suppressed Carrier Receivers with Costas Loop Tracking. IEEE Trans. Commun. 1977, 25, 215–227. [Google Scholar] [CrossRef]
- Park, H.C.; Lu, M.; Bloch, E.; Reed, T.; Griffith, Z.; Johansson, L.; Coldren, L.; Rodwell, M. 40 Gbit/s coherent optical receiver using a Costas loop. Opt. Express 2012, 20, 197–203. [Google Scholar] [CrossRef] [PubMed]
- Biswas, B.N.; Sinha, A.P.; Helaluddin, G.M. Performance Enhancement in Optical Costas Loop Through Phase Subtraction. IETE J. Res. 2015, 40, 143–150. [Google Scholar] [CrossRef]
- Leonov, G.A.; Kuznetsov, N.V.; Yuldashev, M.V.; Yuldashev, R.V. Nonlinear dynamical model of Costas loop and an approach to the analysis of its stability in the large. Signal Processing 2015, 108, 124–135. [Google Scholar] [CrossRef] [Green Version]
- Kahn, J.M.; Porter, A.M.; Padan, U. Heterodyne detection of 310-Mb/s quadriphase-shift keying using fourth-power optical phase-locked loop. IEEE Photonics Technol. Lett. 2002, 4, 1397–1400. [Google Scholar] [CrossRef]
- Yaniv, O.; Raphaeli, D. Near-optimal PLL design for decision-feedback carrier and timing recovery. IEEE Trans. Commun. 2001, 49, 1669–1678. [Google Scholar] [CrossRef]
- Gulikers, R.H.E. Design of a new carrier recovery loop using decision feedback for a 16-state QAM demodulator. In Report of the Graduation Work Accomplished in the Telecommunications Division EC; Eindhoven University of Technology: Eindhoven, The Netherlands, 1991. [Google Scholar]
- “Digital Video Broadcasting (DVB); Second Generation Framing Structure, Channel Coding Andmodulationsystems for Broadcasting, Interactive Services, News Gathering and Other Broadband Satellite Applications”, ETSI EN 302 307 v1.4.1, 2014-11. Available online: https://i-cas.in/documents/DVB%20S2.pdf (accessed on 15 April 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Amplitude Decision Results | Phase Decision Results | Symbol Decision Results | Phase Rotation Angle |
|---|---|---|---|
| inner-circle | s12 | ||
| inner-circle | s14 | ||
| inner-circle | s15 | ||
| inner-circle | s13 | ||
| outer-circle | s4 | ||
| outer-circle | s0 | ||
| outer-circle | s8 | ||
| outer-circle | s10 | ||
| outer-circle | s2 | ||
| outer-circle | s6 | ||
| outer-circle | s7 | ||
| outer-circle | s3 | ||
| outer-circle | s11 | ||
| outer-circle | s9 | ||
| outer-circle | s1 | ||
| outer-circle | s5 |
| Discriminator | Amplitude Decision | Phase Decision | Multiplication |
|---|---|---|---|
| Conventional discriminator | 16 N | 16 N | N |
| Proposed discriminator | 4 N | 2 N | N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Y.; Shi, X.; Zhao, S.; Wang, Y. An Improved Phase Deviation Discriminator for Carrier Synchronization of APSK Signal in Satellite-to-Ground Communication Systems. Electronics 2022, 11, 1472. https://doi.org/10.3390/electronics11091472
Shen Y, Shi X, Zhao S, Wang Y. An Improved Phase Deviation Discriminator for Carrier Synchronization of APSK Signal in Satellite-to-Ground Communication Systems. Electronics. 2022; 11(9):1472. https://doi.org/10.3390/electronics11091472
Chicago/Turabian StyleShen, Yuyao, Xuesen Shi, Shiqi Zhao, and Yongqing Wang. 2022. "An Improved Phase Deviation Discriminator for Carrier Synchronization of APSK Signal in Satellite-to-Ground Communication Systems" Electronics 11, no. 9: 1472. https://doi.org/10.3390/electronics11091472