
Intelligent Reflecting Surface Assisted Localization: Opportunities and Challenges

 , and
, and
Abstract
:1. Introduction

- a brief discussion of the wireless localization system;
- an extensive review on the IRS-assisted localization systems;
- brief mathematical model related to the IRS-assisted communication and localization system;
- an extensive discussion on the relevant challenges and opportunities.
2. Overview on the Wireless Localization
- A reference signal is transmitted from the AN or the AgN and the same is measured at the other end of the link to have certain location-based information such as RSS, AoA/AoD, ToA, and TDoA, etc.
- All the information received at step (1) is used by the local estimation unit (LEU) to approximate the location of the AgN/AN.
- Since all the localization algorithm depends only on the AgN, the computational efficiency of the AgN will determine the speed of operation. Hence, a small change or update of hardware/software at the AgN may increase the system’s overall performance. No need to change the entire network infrastructure.
- Since all the localization algorithm is implanted at the AgN, the possibility of leaking the information reduces as ANs act as only a transmitter with all authorization access limited to the AgN only.
- Dynamic localization scenarios can be further implanted on the AgNs to provide some motion information so that the accuracy can be improved further [17].
3. IRS-Assisted Radio Localization and Mapping (RLM)
3.1. IRS Asisted Microwave/Millimeter-Wave Localization
3.2. IRS Asisted THz Localization
3.3. IRS-Assisted Airborne Mobile Networks Localization
4. Mathematical Model
4.1. System Model
4.1.1. Single-IRS Single User
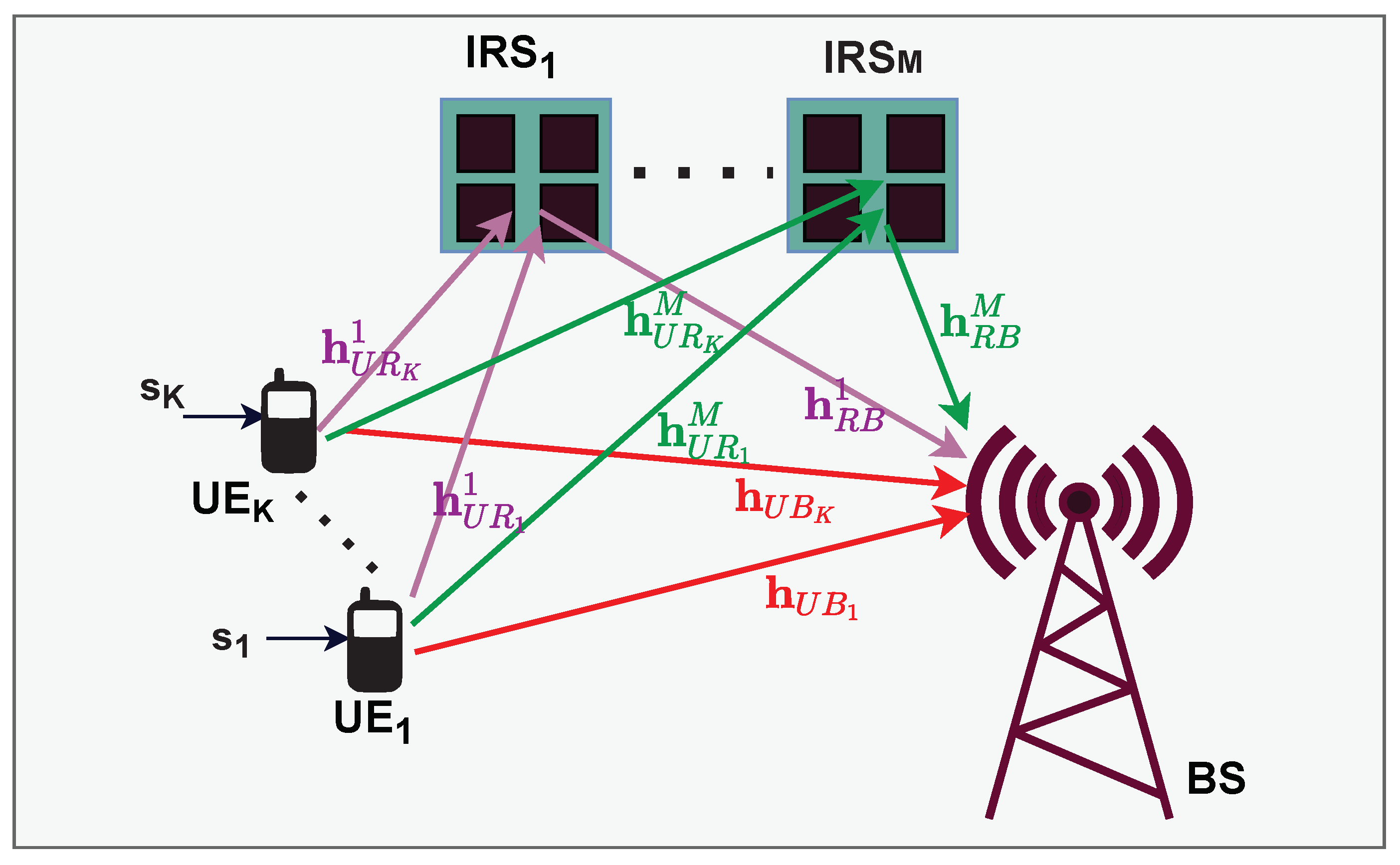
4.1.2. Multi-IRS Multi User
4.2. Localization Estimation: Near-Field
- Detrmination of the channel parameters (, and ) and finding out the FIM of the said parameters.
- Determination of position parameters corresponding the Jacobian and extract the FIM of the position parameters.
- After the extraction of the position parameters, finally the PEB is to be computed to evaluate the location estimation accurecy.
5. Relevant Challenges and Opportunities
5.1. IRS and Channel Modeling/Channel Estimation
5.2. System Architecture and Mitigation of Hardware Impairment
5.3. Deployment Strategies
5.4. Waveform Design/Optimized Beamforming/Phase Shift
5.5. IRS Control/Mobility Management
5.6. Near-Field Propagation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| IRS | Intelligent Reflecting Surface |
| THz | TeraHertz |
| IIoT | Industrial Internet of Thing |
| ITS | Intelligent Transportation System |
| SWIPT | Simultaneous Wireless Information and Power Transfer |
| PEB | Position Error Bounds |
| OEB | Orientation Error Bounds |
| SPEB | Squared Position Error Bound |
| RLM | Radio Localization and Mapping |
| MU | Mobile Units |
| LoS | Line-of-Sight |
| NLoS | Non-Line-of-Sight |
| LISs | large intelligent surfaces |
| CRLB | Cramer–Rao lower bounds |
| RSS | Received Signal Strength |
| AoA | Angle of Arrival |
| ToA | Time of Arrival |
| PoA | Phase of Arrival |
| TDoA | Time Difference of Arrival |
| AoD | Angle-of-Departure |
| GMD | Geometric Mean Decomposition |
| MIMO | Multi Input and Multi Output |
| SISO | Single Input and Single Output |
| mmWave | Millimeter Wave |
| UWB | Ultra Wide Band |
| OFDM | Orthogonal Frequency Division Multiplexing |
| UAV | Unmanned Aerial Vehicle |
| EE | Energy Efficiency |
| SE | Spectral Efficiency |
| AWGN | Additive White Gaussian Noise |
| ML | Maximum Likelihood |
| AOI | Area of Interest |
| ULA | Uniform Linear Array |
| FIM | Fisher Information Matrix |
| UE | User Equipment |
| EM | Electromagnetic |
References
- Renzo, M.D.; Debbah, M.; Phan-Huy, D.T.; Zappone, A.; Alouini, M.S.; Yuen, C.; Sciancalepore, V.; Alexandropoulos, G.C.; Hoydis, J.; Gacanin, H.; et al. Smart radio environments empowered by reconfigurable AI meta-surfaces: An idea whose time has come. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 129. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Cao, X.; Yang, F.; Gao, J.; Xu, S.; Li, M.; Chen, X.; Zhao, Y.; Zheng, Y.; Li, S. A programmable metasurface with dynamic polarization, scattering and focusing control. Sci. Rep. 2016, 6, 35692. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wan, X.; Qi, M.Q.; Chen, T.Y.; Cui, T.J. Field-programmable beam reconfiguring based on digitally-controlled coding metasurface. Sci. Rep. 2016, 6, 20663. [Google Scholar] [CrossRef] [Green Version]
- Ozdogan, O.; Bjornson, E.; Larsson, E.G. Using Intelligent Reflecting Surfaces for Rank Improvement in MIMO Communications. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020. [Google Scholar] [CrossRef] [Green Version]
- Sur, S.N.; Bera, R. Intelligent reflecting surface assisted MIMO communication system: A review. Phys. Commun. 2021, 47, 101386. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflecting Surface Aided Wireless Network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef] [Green Version]
- Elzanaty, A.; Guerra, A.; Guidi, F.; Dardari, D.; Alouini, M.S. Towards 6G Holographic Localization: Enabling Technologies and Perspectives. arXiv 2021, arXiv:2103.12415. [Google Scholar]
- Elzanaty, A.; Guerra, A.; Guidi, F.; Alouini, M.S. Reconfigurable Intelligent Surfaces for Localization: Position and Orientation Error Bounds. arXiv 2020, arXiv:2009.02818. [Google Scholar] [CrossRef]
- Zhang, H.; Hu, J.; Zhang, H.; Di, B.; Bian, K.; Han, Z.; Song, L. MetaRadar: Indoor Localization by Reconfigurable Metamaterials. arXiv 2020, arXiv:2008.02459. [Google Scholar] [CrossRef]
- Wymeersch, H.; Denis, B. Beyond 5G Wireless Localization with Reconfigurable Intelligent Surfaces. In Proceedings of the ICC 2020—2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, H.; Di, B.; Li, L.; Bian, K.; Song, L.; Li, Y.; Han, Z.; Poor, H.V. Reconfigurable Intelligent Surface Based RF Sensing: Design, Optimization, and Implementation. IEEE J. Sel. Areas Commun. 2020, 38, 2700–2716. [Google Scholar] [CrossRef]
- Hu, S.; Rusek, F.; Edfors, O. Beyond Massive MIMO: The Potential of Positioning With Large Intelligent Surfaces. IEEE Trans. Signal Process. 2018, 66, 1761–1774. [Google Scholar] [CrossRef] [Green Version]
- Alegria, J.V.; Rusek, F. Cramér-Rao Lower Bounds for Positioning with Large Intelligent Surfaces using Quantized Amplitude and Phase. In Proceedings of the 2019 53rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 3–6 November 2019. [Google Scholar] [CrossRef]
- Abu-Shaban, Z.; Keykhosravi, K.; Keskin, M.F.; Alexandropoulos, G.C.; Seco-Granados, G.; Wymeersch, H. Near-field Localization with a Reconfigurable Intelligent Surface Acting as Lens. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A Survey of Enabling Technologies for Network Localization, Tracking, and Navigation. IEEE Commun. Surv. Tutor. 2018, 20, 3607–3644. [Google Scholar] [CrossRef] [Green Version]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Gustafsson, F.; Gunnarsson, F. Mobile positioning using wireless networks: Possibilities and fundamental limitations based on available wireless network measurements. IEEE Signal Process. Mag. 2005, 22, 41–53. [Google Scholar] [CrossRef]
- Weiss, A. Direct position determination of narrowband radio transmitters. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004. [Google Scholar] [CrossRef]
- Wang, T.; Hua, W.; Ke, W. A two-step sequential method for device-free localization using wireless sensor networks. Int. J. Distrib. Sens. Netw. 2019, 15, 155014771983281. [Google Scholar] [CrossRef]
- Guvenc, I.; Chong, C.C. A Survey on TOA Based Wireless Localization and NLOS Mitigation Techniques. IEEE Commun. Surv. Tutor. 2009, 11, 107–124. [Google Scholar] [CrossRef]
- Wahab, A.A.; Khattab, A.; Fahmy, Y.A. Two-way TOA with limited dead reckoning for GPS-free vehicle localization using single RSU. In Proceedings of the 2013 13th International Conference on ITS Telecommunications (ITST), Tampere, Finland, 5–7 November 2013. [Google Scholar] [CrossRef]
- Jung, S.Y.; Hann, S.; Park, C.S. TDOA-based optical wireless indoor localization using LED ceiling lamps. IEEE Trans. Consum. Electron. 2011, 57, 1592–1597. [Google Scholar] [CrossRef]
- Kumar, S.; Gil, S.; Katabi, D.; Rus, D. Accurate indoor localization with zero start-up cost. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; ACM: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received-Signal-Strength-Based Indoor Positioning Using Compressive Sensing. IEEE Trans. Mob. Comput. 2012, 11, 1983–1993. [Google Scholar] [CrossRef]
- Vo, Q.D.; De, P. A Survey of Fingerprint-Based Outdoor Localization. IEEE Commun. Surv. Tutor. 2016, 18, 491–506. [Google Scholar] [CrossRef]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Khalajmehrabadi, A.; Gatsis, N.; Akopian, D. Modern WLAN Fingerprinting Indoor Positioning Methods and Deployment Challenges. IEEE Commun. Surv. Tutor. 2017, 19, 1974–2002. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Liu, Y. Rendered Path: Range-Free Localization in Anisotropic Sensor Networks With Holes. IEEE/ACM Trans. Netw. 2010, 18, 320–332. [Google Scholar] [CrossRef] [Green Version]
- Wymeersch, H.; He, J.; Denis, B.; Clemente, A.; Juntti, M. Radio Localization and Mapping With Reconfigurable Intelligent Surfaces: Challenges, Opportunities, and Research Directions. IEEE Veh. Technol. Mag. 2020, 15, 52–61. [Google Scholar] [CrossRef]
- He, J.; Wymeersch, H.; Sanguanpuak, T.; Silven, O.; Juntti, M. Adaptive Beamforming Design for mmWave RIS-Aided Joint Localization and Communication. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), Seoul, Korea, 6–9 April 2020. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, E.; Wang, R. Reconfigurable Intelligent Surface Aided Wireless Localization. arXiv 2020, arXiv:2009.07459. [Google Scholar]
- Alghamdi, R.; Alhadrami, R.; Alhothali, D.; Almorad, H.; Faisal, A.; Helal, S.; Shalabi, R.; Asfour, R.; Hammad, N.; Shams, A.; et al. Intelligent Surfaces for 6G Wireless Networks: A Survey of Optimization and Performance Analysis Techniques. arXiv 2020, arXiv:2006.06541. [Google Scholar] [CrossRef]
- Hu, S.; Rusek, F. Spherical Large Intelligent Surfaces. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Wymeersch, H.; Kong, L.; Silven, O.; Juntti, M. Large Intelligent Surface for Positioning in Millimeter Wave MIMO Systems. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020. [Google Scholar] [CrossRef]
- Basar, E.; Yildirim, I.; Kilinc, F. Indoor and Outdoor Physical Channel Modeling and Efficient Positioning for Reconfigurable Intelligent Surfaces in mmWave Bands. arXiv 2020, arXiv:2006.02240. [Google Scholar] [CrossRef]
- Nguyen, C.L.; Georgiou, O.; Gradoni, G. Reconfigurable Intelligent Surfaces and Machine Learning for Wireless Fingerprinting Localization. arXiv 2020, arXiv:2010.03251. [Google Scholar]
- Ma, T.; Xiao, Y.; Lei, X.; Xiong, W.; Ding, Y. Indoor Localization With Reconfigurable Intelligent Surface. IEEE Commun. Lett. 2021, 25, 161–165. [Google Scholar] [CrossRef]
- Fascista, A.; Coluccia, A.; Wymeersch, H.; Seco-Granados, G. RIS-Aided Joint Localization and Synchronization with a Single-Antenna Mmwave Receiver. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021. [Google Scholar] [CrossRef]
- Cisija, E.; Ahmed, A.M.; Sezgin, A.; Wymeersch, H. Ris-Aided mmWave MIMO Radar System for Adaptive Multi-Target Localization. In Proceedings of the 2021 IEEE Statistical Signal Processing Workshop (SSP), Rio de Janeiro, Brazil, 11–14 July 2021. [Google Scholar] [CrossRef]
- Rahal, M.; Denis, B.; Keykhosravi, K.; Uguen, B.; Wymeersch, H. RIS-Enabled Localization Continuity Under Near-Field Conditions. In Proceedings of the 2021 IEEE 22nd International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Lucca, Italy, 27–30 September 2021. [Google Scholar] [CrossRef]
- Keykhosravi, K.; Keskin, M.F.; Seco-Granados, G.; Wymeersch, H. SISO RIS-Enabled Joint 3D Downlink Localization and Synchronization. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021. [Google Scholar] [CrossRef]
- Alexandropoulos, G.C.; Vinieratou, I.; Wymeersch, H. Localization via Multiple Reconfigurable Intelligent Surfaces Equipped with Single Receive RF Chains. arXiv 2022, arXiv:2202.13939. [Google Scholar] [CrossRef]
- Chen, H.; Sarieddeen, H.; Ballal, T.; Wymeersch, H.; Alouini, M.S.; Al-Naffouri, T.Y. A Tutorial on Terahertz-Band Localization for 6G Communication Systems. arXiv 2021, arXiv:2110.08581. [Google Scholar]
- Chen, Z.; Ma, X.; Han, C.; Wen, Q. Towards intelligent reflecting surface empowered 6G terahertz communications: A survey. China Commun. 2021, 18, 93–119. [Google Scholar] [CrossRef]
- Bourdoux, A.; Barreto, A.N.; van Liempd, B.; de Lima, C.; Dardari, D.; Belot, D.; Lohan, E.S.; Seco-Granados, G.; Sarieddeen, H.; Wymeersch, H.; et al. 6G White Paper on Localization and Sensing. arXiv 2020, arXiv:2006.01779. [Google Scholar]
- Sarieddeen, H.; Saeed, N.; Al-Naffouri, T.Y.; Alouini, M.S. Next Generation Terahertz Communications: A Rendezvous of Sensing, Imaging, and Localization. IEEE Commun. Mag. 2020, 58, 69–75. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; Di, B.; Song, L. Cellular UAV-to-X Communications: Design and Optimization for Multi-UAV Networks. IEEE Trans. Wirel. Commun. 2019, 18, 1346–1359. [Google Scholar] [CrossRef] [Green Version]
- Popoola, O.; Ansari, S.; Ansari, R.I.; Mohjazi, L.; Hassan, S.A.; Aslam, N.; Abbasi, Q.H.; Imran, M.A. IRS-Assisted Localization for Airborne Mobile Networks. Auton. Airborne Wirel. Netw. 2021, 141–156. [Google Scholar] [CrossRef]
- Alfattani, S.; Jaafar, W.; Hmamouche, Y.; Yanikomeroglu, H.; Yongaçoglu, A.; Đào, N.D.; Zhu, P. Aerial Platforms with Reconfigurable Smart Surfaces for 5G and Beyond. arXiv 2020, arXiv:2006.09328. [Google Scholar] [CrossRef]
- Luan, M.; Wang, B.; Zhao, Y.; Feng, Z.; Hu, F. Phase Design and Near-Field Target Localization for RIS-Assisted Regional Localization System. IEEE Trans. Veh. Technol. 2022, 71, 1766–1777. [Google Scholar] [CrossRef]
- Sheng, X.; Hu, Y.H. Maximum likelihood multiple-source localization using acoustic energy measurements with wireless sensor networks. IEEE Trans. Signal Process. 2005, 53, 44–53. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Wang, F.; Li, H.; Himed, B. Maximum Likelihood and IRLS Based Moving Source Localization with Distributed Sensors. IEEE Trans. Aerosp. Electron. Syst. 2020, 57, 448–461. [Google Scholar] [CrossRef]
- Zuo, W.; Xin, J.; Zheng, N.; Sano, A. Subspace-Based Localization of Far-Field and Near-Field Signals Without Eigendecomposition. IEEE Trans. Signal Process. 2018, 66, 4461–4476. [Google Scholar] [CrossRef]
- Zhou, N.; Luo, L.; Sheng, G.; Jiang, X. Power Distribution Network Dynamic Topology Awareness and Localization Based on Subspace Perturbation Model. IEEE Trans. Power Syst. 2020, 35, 1479–1488. [Google Scholar] [CrossRef]
- Han, H.; Liu, Y.; Zhang, L. On Half-Power Beamwidth of Intelligent Reflecting Surface. IEEE Commun. Lett. 2021, 25, 1333–1337. [Google Scholar] [CrossRef]
- Tian, G.; Song, R. Cooperative beamforming for a double-IRS-assisted wireless communication system. EURASIP J. Adv. Signal Process. 2021, 2021, 67. [Google Scholar] [CrossRef]
- Mao, Z.; Wang, W.; Xia, Q.; Zhong, C.; Pan, X.; Ye, Z. Element-Grouping Intelligent Reflecting Surface: Electromagnetic-Compliant Model and Geometry-Based Optimization. IEEE Trans. Wirel. Commun. 2022, 1–15. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, L.; Cui, S. Channel Estimation for Intelligent Reflecting Surface Assisted Multiuser Communications: Framework, Algorithms, and Analysis. IEEE Trans. Wirel. Commun. 2020, 19, 6607–6620. [Google Scholar] [CrossRef]
- Zhang, W. Introduction. In Dynamics of Coupled Systems in High-Speed Railways; Elsevier: Amsterdam, The Netherlands, 2020; pp. 1–54. [Google Scholar] [CrossRef]
- Alexandropoulos, G.C.; Lerosey, G.; Debbah, M.; Fink, M. Reconfigurable Intelligent Surfaces and Metamaterials: The Potential of Wave Propagation Control for 6G Wireless Communications. arXiv 2020, arXiv:2006.11136. [Google Scholar]
- Xing, Z.; Wang, R.; Wu, J.; Liu, E. Achievable Rate Analysis and Phase Shift Optimization on Intelligent Reflecting Surface With Hardware Impairments. IEEE Trans. Wirel. Commun. 2021, 20, 5514–5530. [Google Scholar] [CrossRef]
- Nguyen, N.D.; Le, A.T.; Munochiveyi, M.; Afghah, F.; Pallis, E. Intelligent Reflecting Surface Aided Wireless Systems with Imperfect Hardware. Electronics 2022, 11, 900. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, S.; Duan, L.; Zhang, R. Cooperative Double-IRS Aided Communication: Beamforming Design and Power Scaling. IEEE Wirel. Commun. Lett. 2020, 9, 1206–1210. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Hua, M.; Wang, Q.; Song, Q. Weighted Sum-Rate Maximization for Multi-IRS Aided Cooperative Transmission. IEEE Wirel. Commun. Lett. 2020, 9, 1620–1624. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, R. Intelligent Reflecting Surface Aided Multiple Access: Capacity Region and Deployment Strategy. arXiv 2020, arXiv:2002.07091. [Google Scholar]
- He, J.; Yu, K.; Shi, Y. Coordinated Passive Beamforming for Distributed Intelligent Reflecting Surfaces Network. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020. [Google Scholar] [CrossRef]
- Zhang, C.; Yi, W.; Liu, Y.; Qin, Z.; Chai, K.K. Downlink Analysis for Reconfigurable Intelligent Surfaces Aided NOMA Networks. arXiv 2020, arXiv:2006.13260. [Google Scholar]
- Kishk, M.A.; Alouini, M.S. Exploiting Randomly Located Blockages for Large-Scale Deployment of Intelligent Surfaces. IEEE J. Sel. Areas Commun. 2021, 39, 1043–1056. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Poor, H.V. RIS Enhanced Massive Non-Orthogonal Multiple Access Networks: Deployment and Passive Beamforming Design. IEEE J. Sel. Areas Commun. 2021, 39, 1057–1071. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, W. Joint Beam Training and Positioning for Intelligent Reflecting Surfaces Assisted Millimeter Wave Communications. IEEE Trans. Wirel. Commun. 2021, 20, 6282–6297. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Year | Environment | IRS-Assisted System Configuration | Performance Matrix | Significant Observations |
|---|---|---|---|---|---|
| [12] | 2018 | With perfect LoS component | Large intelligent surface (LIS)-mMIMO | Fisher-information matrix (FIM) and CRLB | It compare the centralized and distributed deployments of the LIS and established that the distributed deployments extend the coverage of terminal-positioning and improved the average CRLBs for all dimensions. |
| [30] | 2020 | mmWave channel with obstructed LoS path. | mmWavw MIMO-OFDM system. | Positioning accuracy and data rate. | It highlights the importance of proper phase design and proposed an adaptive phase shifter design based on hierarchical codebooks and feedback from the mobile station (MS). |
| [31] | 2020 | mmWave channel with obstructed LoS. | mmWave MIMO system. | CRLB (MS position estimate) | It proposed the gradient decent method (GDM) based Reflect Beamforming with Alternative Optimization Method at the IRS to reduce the localization error. It also demonstrates that by utilizing the IRS, decimeter-level or even centimeter-level positioning can be achieved with a large number of reflecting elements. |
| [10] | 2020 | mmWave channel with LoS component. | OFDM system with IRS-assisted network. | FIM, Position Error Bound (PEB) | It proposed a two-step optimization technique to select the best phase shift combination of the IRS to improve the wireless localization performance. |
| [34] | 2020 | mmWave channel with LoS component. | mmWave MIMO-OFDM system. | Impact of phases on CRB. | It provides the theoretical CRBL for positioning, and analyzed the impact of the number of LIS elements and the value of phase shifters on the position estimation accuracy. |
| [35] | 2020 | Indoor(office)/outdoor (Street Canyon)channel with LoS and NLoS components. | mmWave MIMO system. | Data Rate | It highlights the importance of the deployment of IRS and provide useful analysis regarding efficient positioning of the IRS-assisted communication systems. |
| [8] | 2020 | Near field/far field propagation environment with 3D scattering channel model. | MIMO-OFDM system. | CRLB, geometric dilution of precision (GDOP), PEB and orientation error bound (OEB). | It highlights the impact of the deployment geomertric of IRS and optimal phase design on the positioning information. The positioning performation is evaluated in terms of PEB and OEB, considering both near- and far-field propagation conditinon. |
| [36] | 2020 | Indoor environment | Access point (AP)-IRS combined system | Localization error | It proposed a heuristic state selection (HSS) algorithm for selecting the optimal IRS configuration subset and a machine learning feature selections (ML-FS) algorithm for enhancing localization accuracy and position acquisition time with reduced complexity. |
| [9] | 2020 | mmWave indoor environment. | MetaRadar based localization system. | Localization error and map | IRS aided multi-user localization protocol was proposed, based on signal strength measurements. As demontrated the proposed system with a 0.48 m2 metasurface can achieve a centimeter localization accuracy with up to 2 m localization range for single user and multiple users without obstruction. |
| [37] | 2021 | Indoor environment | UWB | CRLB of the position estimates. | The combination of IRS and UWB signals can be used to aquair accurate indoor positioning with a single access point. |
| [14] | 2021 | mmWave with Near Field propagation environment | mmWave positioning system with IRS based lens | Position Error Bounds (PEBs) | It demontrated the location estimation performance by exploiting the wavefron curvature of the IRS lens. |
| [38] | 2021 | mmWave channel with LoS and NLoS components. | mmWave MISO OFDM system | Root mean squared error (RMSE) on the estimation and CRLB of the estimation error. | It proposed direct ML estimator for the position and clock offset. Furthermore, it also proposed a low complex relaxed ML-based estimator (RML) that can obtain suboptimal performance in absence of optimized beamforming and IRS control matrix. |
| [39] | 2021 | mmWave channel with LoS blockage. | mmWave MIMO system. | RMSE of the estimated position. | It proposed a parallel adaptive multi-target localization algorithm based on the hierarchical codebook concept. |
| [40] | 2021 | Multipath-channel both LoS and NLoS components under near and far field condition. | SISO multi-carrier system. | PEB | It demonstrate the impact of the wavefront curvature under near field conditions. |
| [41] | 2021 | Outdoor environment with LoS component. | SISO OFDM system. | Estimation error and PEB | It proposed a low-complex 3D localization and synchronization method. It also demonstrated that the localization is possible by AoD estimation from the IRS. |
| [42] | 2022 | Indoor environment | Multi-IRS-assisted Sensing system. | PEB | It demonstrated a ML-based localization method with multiple IRSs having single RF chain. The proposed scheme depends on the beamspace OMP technique for AoA estimation and LS-based line intersection. |
| Ref. | Year | Area | Number of IRS | IRS Deployment Strategies | Outcome | Localization Accuracy | Limitation |
|---|---|---|---|---|---|---|---|
| [12] | 2018 | Indoor/ Outdoor | Single/ multi(4)-IRSs | Centralized/ Distributed deployment | Extend the coverage of terminal-positioning. | - | The proposed analysis is based on the assumption of perfect LoS environment. |
| [30] | 2020 | Outdoor | Single | Fixed single IRS between BS and UE. | Improved accuracy and Data rate | - | There is perfect knowledge of IRS position to the BS. |
| [31] | 2020 | Outdoor | Single | Fixed large IRS | Improved accuracy | decimeter-level/centimeter-level with IRS with a large number of reflecting elements. | The large no of IRS elements leads to the increase in the complexity in estimation. |
| [10] | 2020 | Outdoor | Multiple IRSs | Fixed linear array of multiple IRSs on wall. | Improved coverage and accuracy | For single IRS, PEB is less than 5 m whereas with 5 IRSs PEB is less than 2.5 m. | The uncertainty of UE location should also be considered. |
| [35] | 2020 | Indoor/ Outdoor | Single | Indoor: mounted on side wall. Outdoor: facade of a building. | Improved rate | Accurate modeling of the composite channel. | |
| [8] | 2020 | Indoor | Single | Mounted on wall | Improved PEB, OEB | The localization accuracy strongly depends on the geometry and the orientation of the UE. | Performance limits in presence of multiple IRSs. |
| [36] | 2020 | Indoor | Single | Mounted on wall | Improved accuracy | Oder of meter with 22 elements in IRS. | Analysis with mixed environment (LoS and NLoS) and multiple IRSs. |
| [9] | 2020 | Indoor | Single | Mounted on wall | Improved accuracy | A centimeter scale accuracy with up to 2 m range for single user and multiple users without obstruction. | Analysis on the impact of interference in case of multi-user scenario. |
| [37] | 2021 | Indoor | Single | Mounted on wall | Improved accuracy | The positioning accuracy can be improved significantly by adopting ToA in comparison to AoA. | Analysis under multi-user scenario. |
| [14] | 2021 | Indoor | Single | Single receiver comprising of IRS lens. | Improved accuracy. | A decimeter-level accuracy achieved within 3 m to the lens. | Analysis in presence of multi-path and multi-user scenario. |
| [40] | 2021 | Indoor | Multiple | Mounted on wall | Improved accuracy | Under near field condition number of elements in IRS significantly improve the accuracy. | Analysis of multi-user environment and with uncertainty in UE location. |
| [42] | 2022 | Indoor | Multiple | Mounted on side wall | Improved accuracy | Accuracy upto 0.07 m can be possible with 4-IRSs (64 elements each). | Impact of multi-user on the localization accuracy. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sur, S.N.; Singh, A.K.; Kandar, D.; Silva, A.; Nguyen, N.D. Intelligent Reflecting Surface Assisted Localization: Opportunities and Challenges. Electronics 2022, 11, 1411. https://doi.org/10.3390/electronics11091411
Sur SN, Singh AK, Kandar D, Silva A, Nguyen ND. Intelligent Reflecting Surface Assisted Localization: Opportunities and Challenges. Electronics. 2022; 11(9):1411. https://doi.org/10.3390/electronics11091411
Chicago/Turabian StyleSur, Samarendra Nath, Arun Kumar Singh, Debdatta Kandar, Adão Silva, and Nhan Duc Nguyen. 2022. "Intelligent Reflecting Surface Assisted Localization: Opportunities and Challenges" Electronics 11, no. 9: 1411. https://doi.org/10.3390/electronics11091411