
Adaptive Neural Partial State Tracking Control for Full-State-Constrained Uncertain Singularly Perturbed Nonlinear Systems and Its Applications to Electric Circuit

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- An appropriate Lyapunov function with singular perturbation structure is established to prove the system stability. The lurking ill-conditioned numerical problems in the feedback control is prevented.
2. Problem Formulation and Preliminaries
2.1. System Descriptions
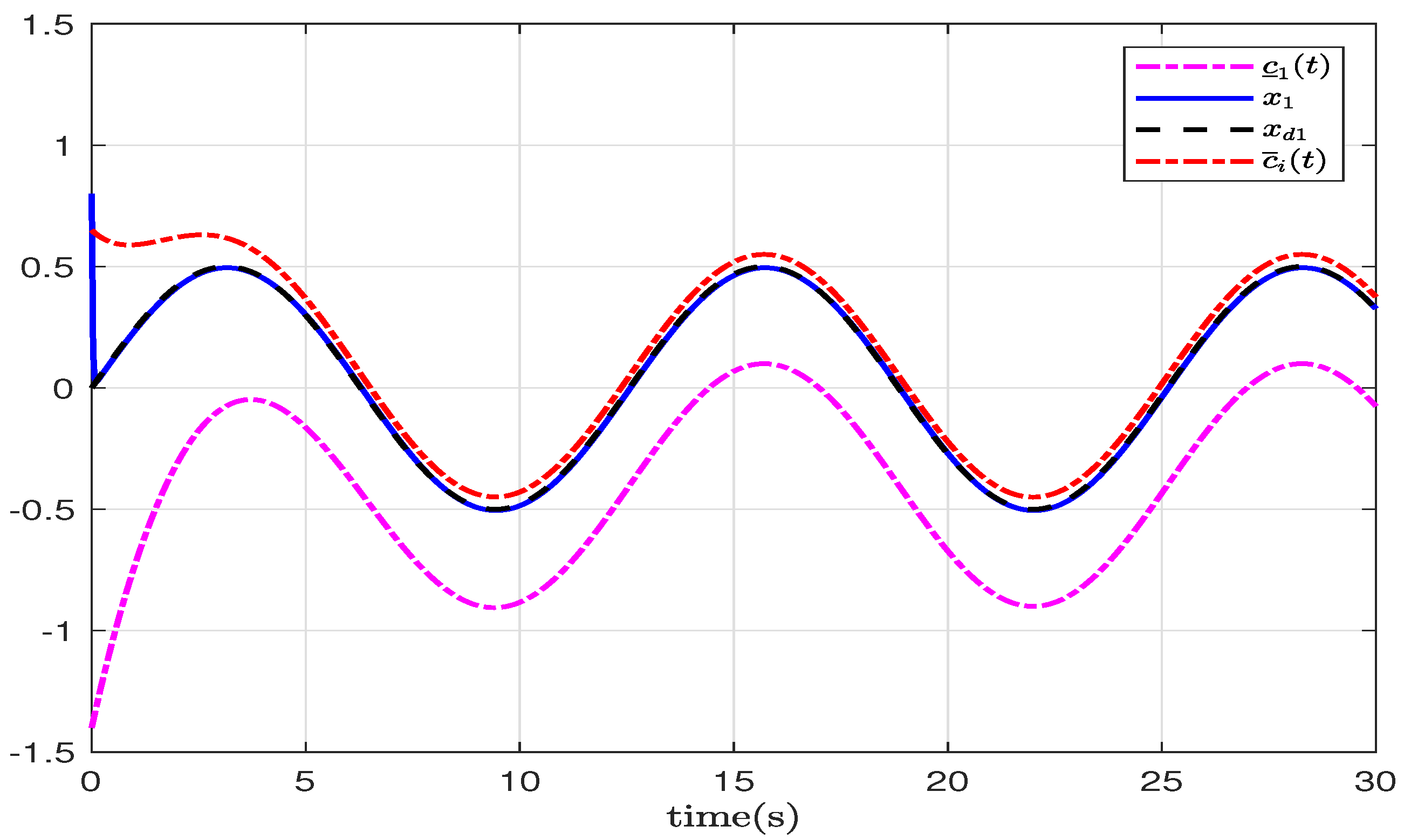
- The slow states track a reference trajectory ;
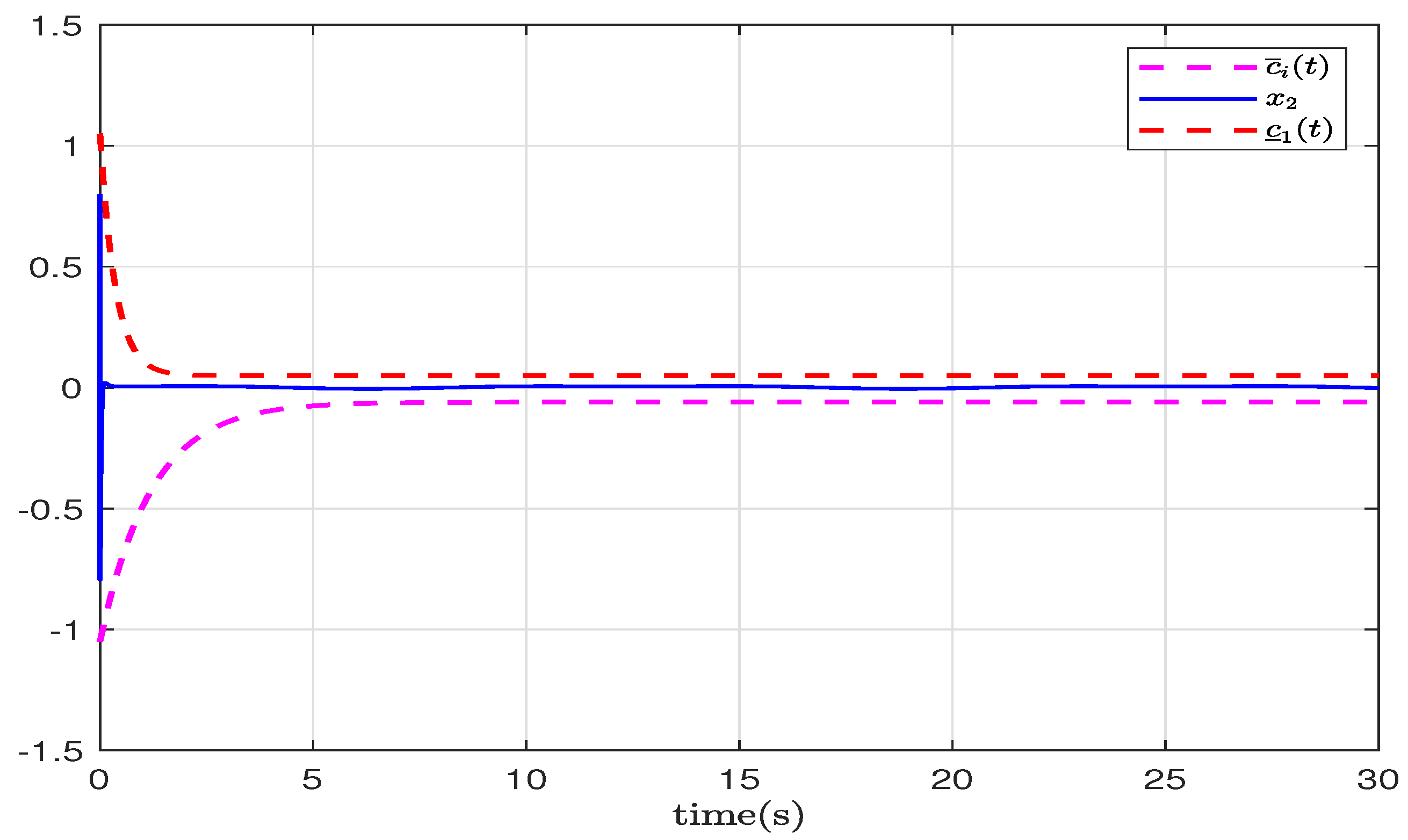
- The full system states are forced to be within the asymmetric and time-varying constraints for all times, e.g.,where and are the lower and upper bounds for the state ;
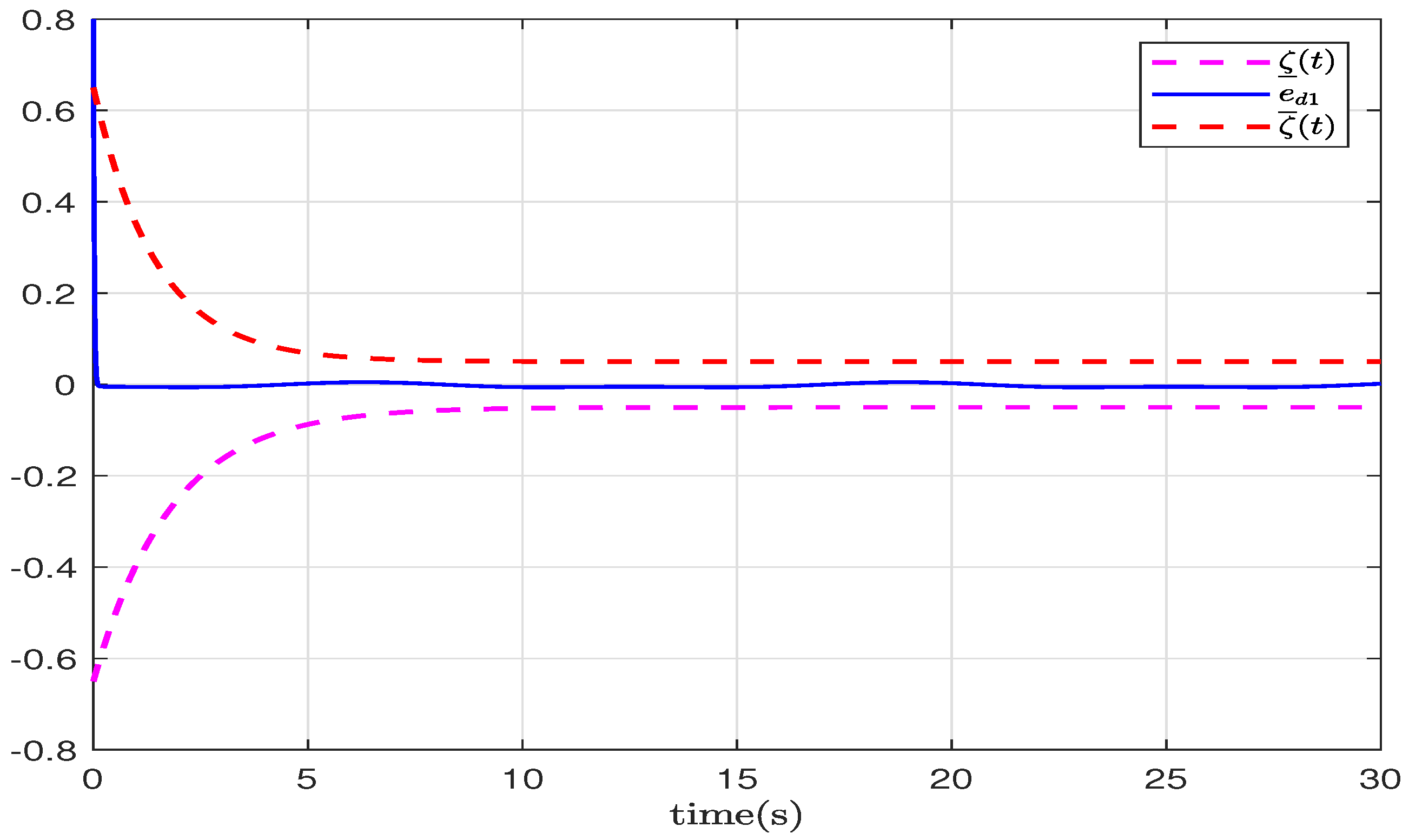
- All the signals in the closed-loop system are semi-globally uniformly ultimately bounded (SGUUB).
2.2. Neural Network Online Approximation
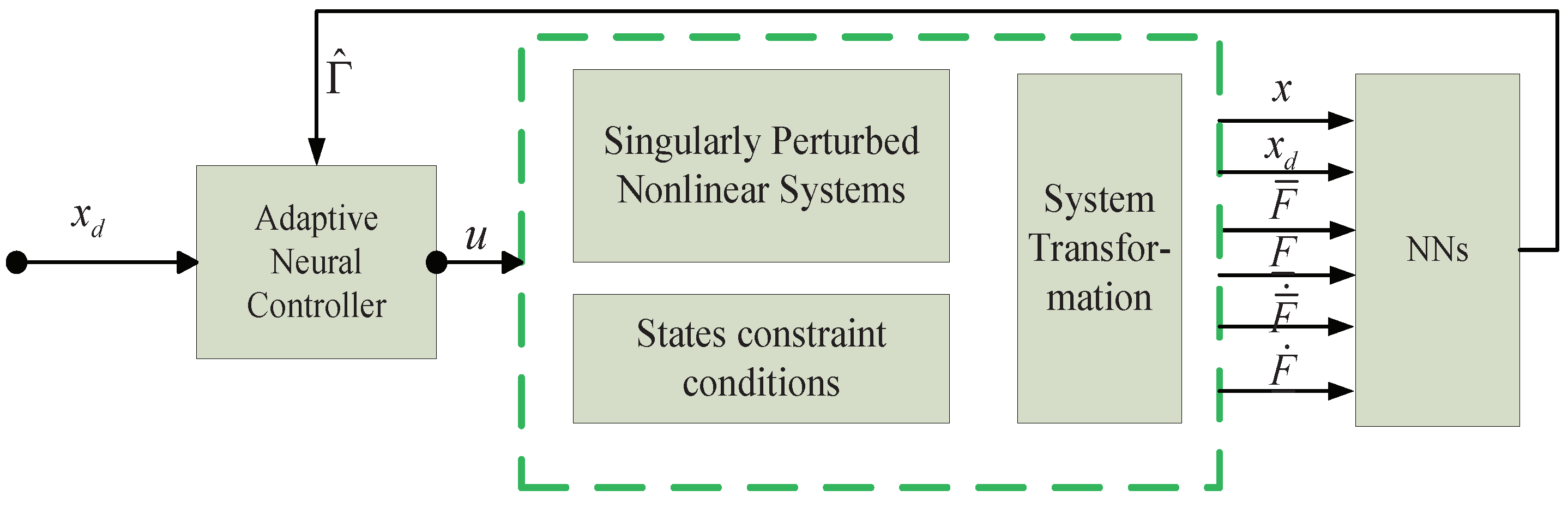
3. Main Results
3.1. System Transformation
3.2. Adaptive Controller Design and Stability Analysis
- The full state constraints of the system are maintained in (2);
- The boundedness of all signals in the closed-loop system are guaranteed.
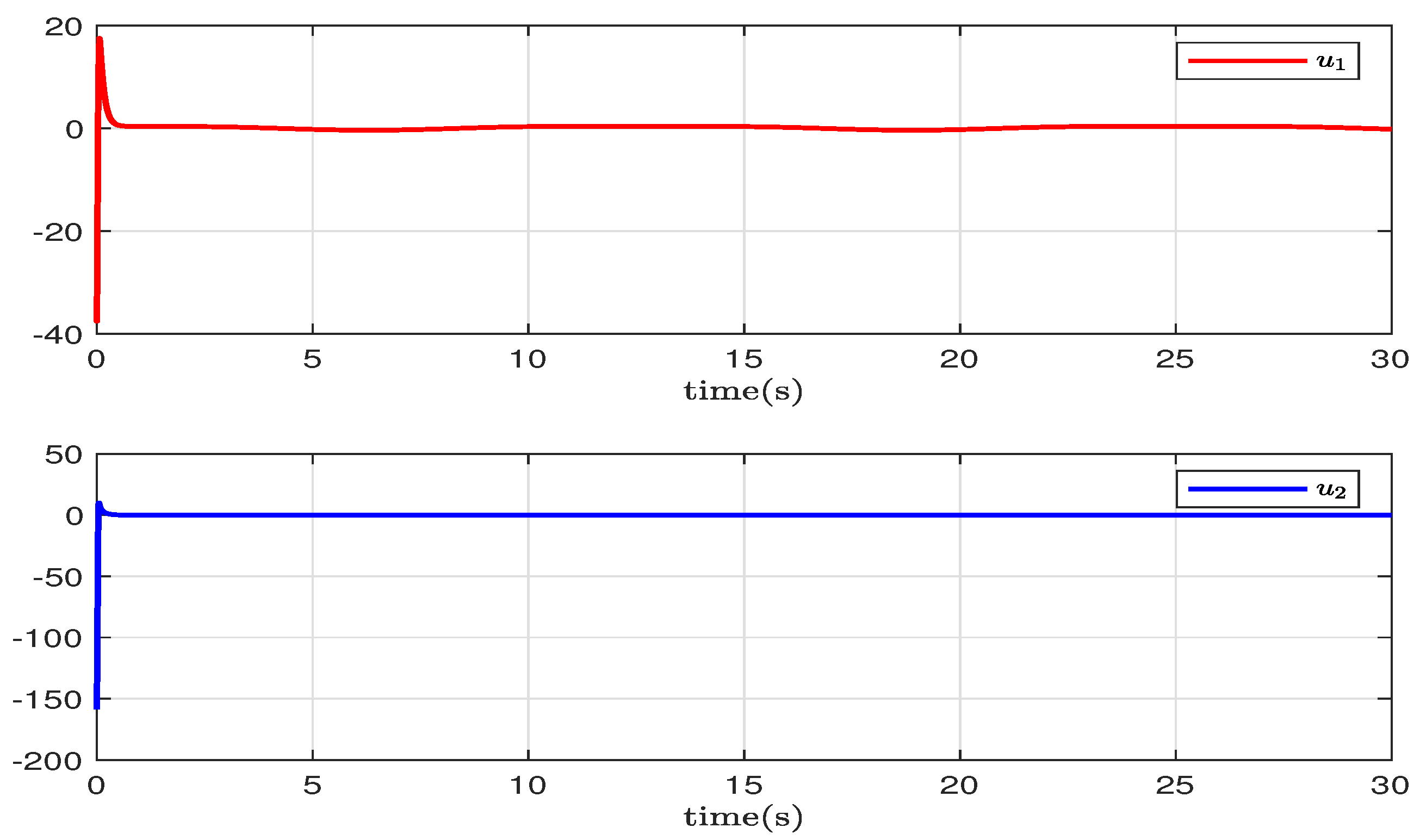
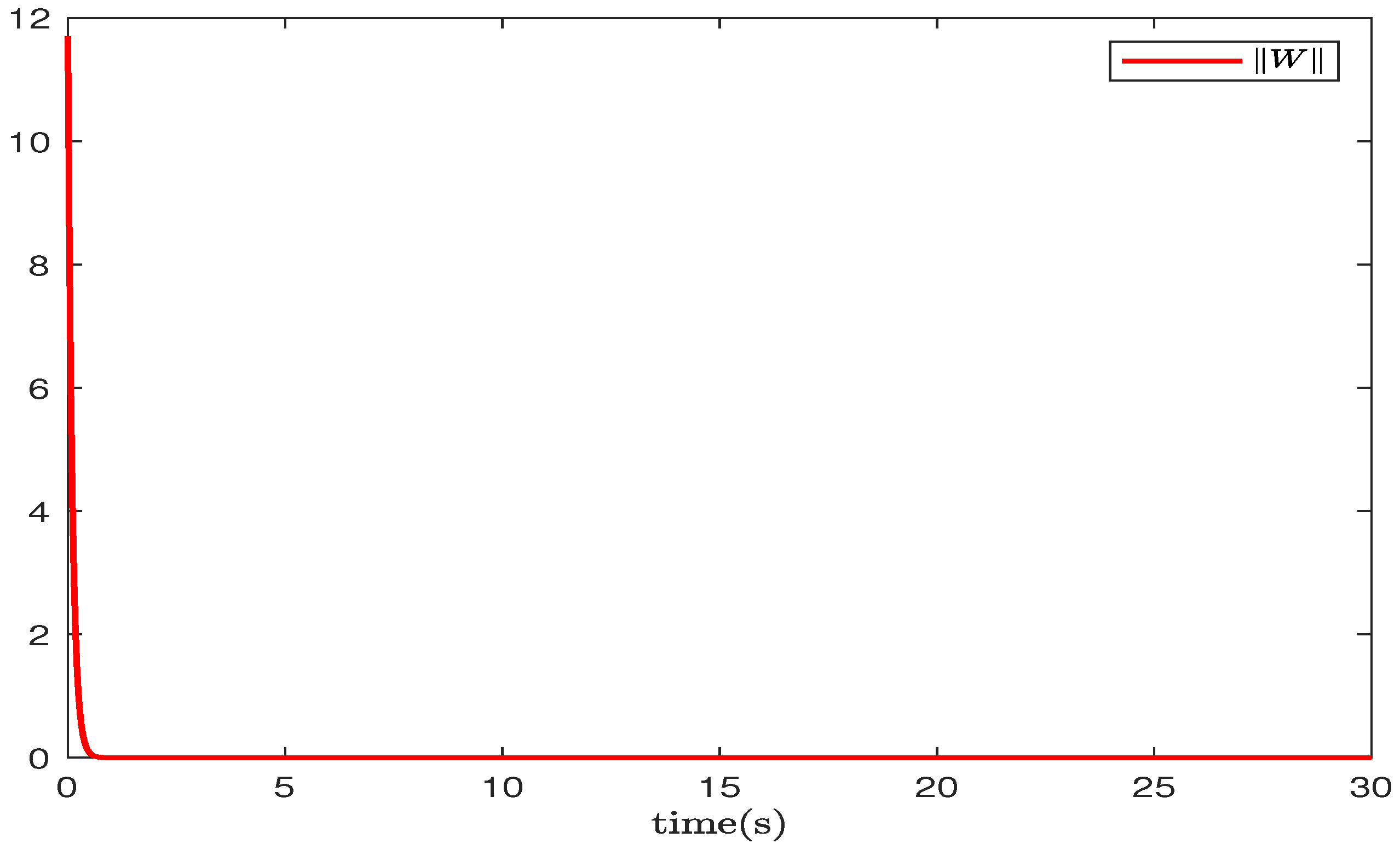
4. Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ren, W.; Jiang, B.; Yang, H. Singular perturbation-based fault-tolerant control of the air-breathing hypersonic vehicle. IEEE/ASME Trans. Mechatronics 2019, 24, 2562–2571. [Google Scholar] [CrossRef]
- Van Henten, E.J.; Bontsema, J. Time-scale decomposition of an optimal control problem in greenhouse climate management. Control Eng. Pract. 2009, 17, 88–96. [Google Scholar] [CrossRef]
- Ren, W.; Jiang, B.; Yang, H. Fault-tolerant control of singularly perturbed systems with applications to hypersonic vehicles. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3003–3015. [Google Scholar] [CrossRef]
- Xu, J.; Lim, C.C.; Shi, P. Sliding mode control of singularly perturbed systems and its application in quad-rotors. Int. J. Control 2019, 92, 1325–1334. [Google Scholar] [CrossRef]
- Ma, L.; Wang, Z.; Cai, C.; Alsaadi, F.E. Dynamic event-triggered state estimation for discrete-time singularly perturbed systems with distributed time-delays. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 3258–3268. [Google Scholar] [CrossRef]
- Rejeb, J.B.; Morărescu, I.C.; Daafouz, J. Control design with guaranteed cost for synchronization in networks of linear singularly perturbed systems. Automatica 2018, 91, 89–97. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Yang, C.; Zhou, L.; Dai, W. Suboptimal reduced control of unknown nonlinear singularly perturbed systems via reinforcement learning. Int. J. Robust Nonlinear Control 2021, 31, 6626–6645. [Google Scholar] [CrossRef]
- Yang, C.; Zhong, S.; Liu, X.; Zhou, L. Adaptive composite suboptimal control for linear singularly perturbed systems with unknown slow dynamics. Int. J. Robust Nonlinear Control 2020, 30, 2625–2643. [Google Scholar] [CrossRef]
- Liu, X.; Yang, C.; Zhu, S. Inverse optimal synchronization control of competitive neural networks with constant time delays. Neural Comput. Appl. 2022, 34, 241–251. [Google Scholar] [CrossRef]
- Lei, Y.; Wang, Y.W.; Morarescu, I.C.; Postoyan, R. Event-triggered fixed-time stabilization of two-time-scale linear systems. IEEE Trans. Autom. Control 2022. [Google Scholar] [CrossRef]
- Cheng, J.; Yan, H.; Park, J.H.; Zong, G. Output-feedback control for fuzzy singularly perturbed systems: A nonhomogeneous stochastic communication protocol approach. IEEE Trans. Cybern. 2021. [Google Scholar] [CrossRef]
- Wang, Y.; Shi, P.; Yan, H. Reliable control of fuzzy singularly perturbed systems and its application to electronic circuits. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 65, 3519–3528. [Google Scholar] [CrossRef]
- Shen, H.; Li, F.; Wu, Z.G.; Sreeram, V. Fuzzy-model-based nonfragile control for nonlinear singularly perturbed systems with semi-Markov jump parameters. IEEE Trans. Fuzzy Syst. 2018, 26, 3428–3439. [Google Scholar] [CrossRef]
- Chen, J.; He, C. Modeling, Fault Detection and Fault-tolerant Control for Nonlinear Singularly Perturbed Systems with Actuator Faults and External Disturbances. IEEE Trans. Fuzzy Syst. 2021. [Google Scholar] [CrossRef]
- Liu, X.; Yang, C.; Luo, B.; Dai, W. Suboptimal control for nonlinear slow-fast coupled systems using reinforcement learning and Takagi–Sugeno fuzzy methods. Int. J. Adapt. Control Signal Process. 2021, 35, 1017–1038. [Google Scholar] [CrossRef]
- Wang, J.; Yang, C.; Xia, J.; Shen, H. Observer-based sliding mode control for networked fuzzy singularly perturbed systems under weighted try-once-discard protocol. IEEE Trans. Fuzzy Syst. 2021. [Google Scholar] [CrossRef]
- Fu, Z.J.; Xie, W.F.; Luo, W.D. Robust on-line nonlinear systems identification using multilayer dynamic neural networks with two-time scales. Neurocomputing 2013, 113, 16–26. [Google Scholar] [CrossRef]
- Fu, Z.J.; Xie, W.F.; Han, X.; Luo, W.D. Nonlinear systems identification and control via dynamic multitime scales neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1814–1823. [Google Scholar] [CrossRef]
- Han, X.; Xie, W.F.; Fu, Z.; Luo, W. Nonlinear systems identification using dynamic multi-time scale neural networks. Neurocomputing 2011, 74, 3428–3439. [Google Scholar] [CrossRef]
- Song, S.; Zhang, B.; Song, X.; Zhang, Y.; Zhang, Z.; Li, W. Fractional-order adaptive neuro-fuzzy sliding mode H∞ control for fuzzy singularly perturbed systems. J. Frankl. Inst. 2019, 356, 5027–5048. [Google Scholar] [CrossRef]
- Fu, Z.; Xie, W.; Rakheja, S.; Na, J. Observer-based adaptive optimal control for unknown singularly perturbed nonlinear systems with input constraints. IEEE/CAA J. Autom. Sin. 2017, 4, 48–57. [Google Scholar] [CrossRef]
- Fu, Z.; Xie, W.; Rakheja, S.; Zheng, D.D. Adaptive optimal control of unknown nonlinear systems with different time scales. Neurocomputing 2017, 238, 179–190. [Google Scholar] [CrossRef]
- Zheng, D.; Xie, W.; Ren, X.; Na, J. Identification and control for singularly perturbed systems using multitime-scale neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 321–333. [Google Scholar] [CrossRef]
- Zheng, D.D.; Xie, W.F.; Chai, T.; Fu, Z. Identification and trajectory tracking control of nonlinear singularly perturbed systems. IEEE Trans. Ind. Electron. 2016, 64, 3737–3747. [Google Scholar] [CrossRef]
- Zheng, D.D.; Fu, Z.J.; Xie, W.F.; Luo, W.D. Indirect adaptive control of nonlinear system via dynamic multilayer neural networks with multi-time scales. Int. J. Adapt. Control Signal Process. 2015, 29, 505–523. [Google Scholar] [CrossRef]
- Burger, M.; Guay, M. Robust constraint satisfaction for continuous-time nonlinear systems in strict feedback form. IEEE Trans. Autom. Control 2010, 55, 2597–2601. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Bemporad, A. Reference governor for constrained nonlinear systems. IEEE Trans. Autom. Control 1998, 43, 415–419. [Google Scholar] [CrossRef] [Green Version]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Tee, K.P.; Ren, B.; Ge, S.S. Control of nonlinear systems with time-varying output constraints. Automatica 2011, 47, 2511–2516. [Google Scholar] [CrossRef]
- Liu, Y.J.; Tong, S. Barrier Lyapunov functions-based adaptive control for a class of nonlinear pure-feedback systems with full state constraints. Automatica 2016, 64, 70–75. [Google Scholar] [CrossRef]
- Liu, Y.J.; Ma, L.; Liu, L.; Tong, S.; Chen, C.P. Adaptive neural network learning controller design for a class of nonlinear systems with time-varying state constraints. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 66–75. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.J.; Zeng, Q.; Tong, S.; Chen, C.P.; Liu, L. Adaptive neural network control for active suspension systems with time-varying vertical displacement and speed constraints. IEEE Trans. Ind. Electron. 2019, 66, 9458–9466. [Google Scholar] [CrossRef]
- Liu, L.; Gao, T.; Liu, Y.J.; Tong, S. Time-varying asymmetrical BLFs based adaptive finite-time neural control of nonlinear systems with full state constraints. IEEE/CAA J. Autom. Sin. 2020, 7, 1335–1343. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Y.; Tong, S. Observer-based neuro-adaptive optimized control of strict-feedback nonlinear systems with state constraints. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef]
- Gao, T.; Liu, Y.J.; Li, D.; Tong, S.; Li, T. Adaptive neural control using tangent time-varying BLFs for a class of uncertain stochastic nonlinear systems with full state constraints. IEEE Trans. Cybern. 2019, 51, 1943–1953. [Google Scholar] [CrossRef]
- Wu, X.J.; Wu, X.L.; Luo, X.Y.; Guan, X.P. Dynamic surface control for a class of state-constrained non-linear systems with uncertain time delays. IET Control Theory Appl. 2012, 6, 1948–1957. [Google Scholar] [CrossRef]
- Zhao, K.; Song, Y.; Shen, Z. Neuroadaptive fault-tolerant control of nonlinear systems under output constraints and actuation faults. IEEE Trans. Neural Netw. Learn. Syst. 2016, 29, 286–298. [Google Scholar] [CrossRef]
- Tang, Z.L.; Ge, S.S.; Tee, K.P.; He, W. Robust adaptive neural tracking control for a class of perturbed uncertain nonlinear systems with state constraints. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1618–1629. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, Y.; Liu, L. Observer-based adaptive fuzzy tracking control using integral barrier Lyapunov functionals for A nonlinear system with full state constraints. IEEE/CAA J. Autom. Sin. 2021, 8, 617–627. [Google Scholar] [CrossRef]
- Gao, T.; Li, T.; Liu, Y.J.; Tong, S. IBLF-based adaptive neural control of state-constrained uncertain stochastic nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Gao, T.; Liu, Y.J.; Tong, S.; Chen, C.P.; Ma, L. Time-varying IBLFs-based adaptive control of uncertain nonlinear systems with full state constraints. Automatica 2021, 129, 109595. [Google Scholar] [CrossRef]
- Zhang, T.; Xia, M.; Yi, Y.; Shen, Q. Adaptive neural dynamic surface control of pure-feedback nonlinear systems with full state constraints and dynamic uncertainties. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2378–2387. [Google Scholar] [CrossRef]
- Zhao, K.; Song, Y. Removing the feasibility conditions imposed on tracking control designs for state-constrained strict-feedback systems. IEEE Trans. Autom. Control 2018, 64, 1265–1272. [Google Scholar] [CrossRef]
- Zhao, K.; Song, Y.; Zhang, Z. Tracking control of MIMO nonlinear systems under full state constraints: A single-parameter adaptation approach free from feasibility conditions. Automatica 2019, 107, 52–60. [Google Scholar] [CrossRef]
- Zhao, K.; Chen, J. Adaptive neural quantized control of MIMO nonlinear systems under actuation faults and time-varying output constraints. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 3471–3481. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.J.; Guo, C.; Cui, R.H. Removing feasibility conditions on tracking control of full-state constrained nonlinear systems with time-varying powers. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 6535–6543. [Google Scholar] [CrossRef]
- Lala, T.; Chirla, D.P.; Radac, M.B. Model Reference Tracking Control Solutions for a Visual Servo System Based on a Virtual State from Unknown Dynamics. Energies 2021, 15, 267. [Google Scholar] [CrossRef]
- Perrusquía, A.; Yu, W. Neural H2 Control Using Continuous-Time Reinforcement Learning. IEEE Trans. Cybern. 2020. [Google Scholar] [CrossRef]
- Hu, X.; Zhang, H.; Ma, D.; Wang, R.; Wang, T.; Xie, X. Real-Time Leak Location of Long-Distance Pipeline Using Adaptive Dynamic Programming. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef]
- Mosavi, A.; Qasem, S.N.; Shokri, M.; Band, S.S.; Mohammadzadeh, A. Fractional-order fuzzy control approach for photovoltaic/battery systems under unknown dynamics, variable irradiation and temperature. Electronics 2020, 9, 1455. [Google Scholar] [CrossRef]
- Liu, Z.; Mohammadzadeh, A.; Turabieh, H.; Mafarja, M.; Band, S.S.; Mosavi, A. A new online learned interval type-3 fuzzy control system for solar energy management systems. IEEE Access 2021, 9, 10498–10508. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Liu, X.; Yang, C. Adaptive Neural Partial State Tracking Control for Full-State-Constrained Uncertain Singularly Perturbed Nonlinear Systems and Its Applications to Electric Circuit. Electronics 2022, 11, 1209. https://doi.org/10.3390/electronics11081209
Wang H, Liu X, Yang C. Adaptive Neural Partial State Tracking Control for Full-State-Constrained Uncertain Singularly Perturbed Nonlinear Systems and Its Applications to Electric Circuit. Electronics. 2022; 11(8):1209. https://doi.org/10.3390/electronics11081209
Chicago/Turabian StyleWang, Hao, Xiaomin Liu, and Chunyu Yang. 2022. "Adaptive Neural Partial State Tracking Control for Full-State-Constrained Uncertain Singularly Perturbed Nonlinear Systems and Its Applications to Electric Circuit" Electronics 11, no. 8: 1209. https://doi.org/10.3390/electronics11081209