1. Introduction
An intelligent transportation system (ITS) plays an increasingly prominent role in alleviating traffic congestion and reducing traffic accidents [
1]. By integrating with existing communication technologies, it ensures the safety and reliability of the information transmission during vehicle driving and that it happens in real time. As the information-bearing platform of ITS, the vehicular ad hoc network (VANET) [
2] realizes the sharing of vehicle position, speed, direction and other information through wireless communication technology to ensure the efficient traffic safety and other information transmission [
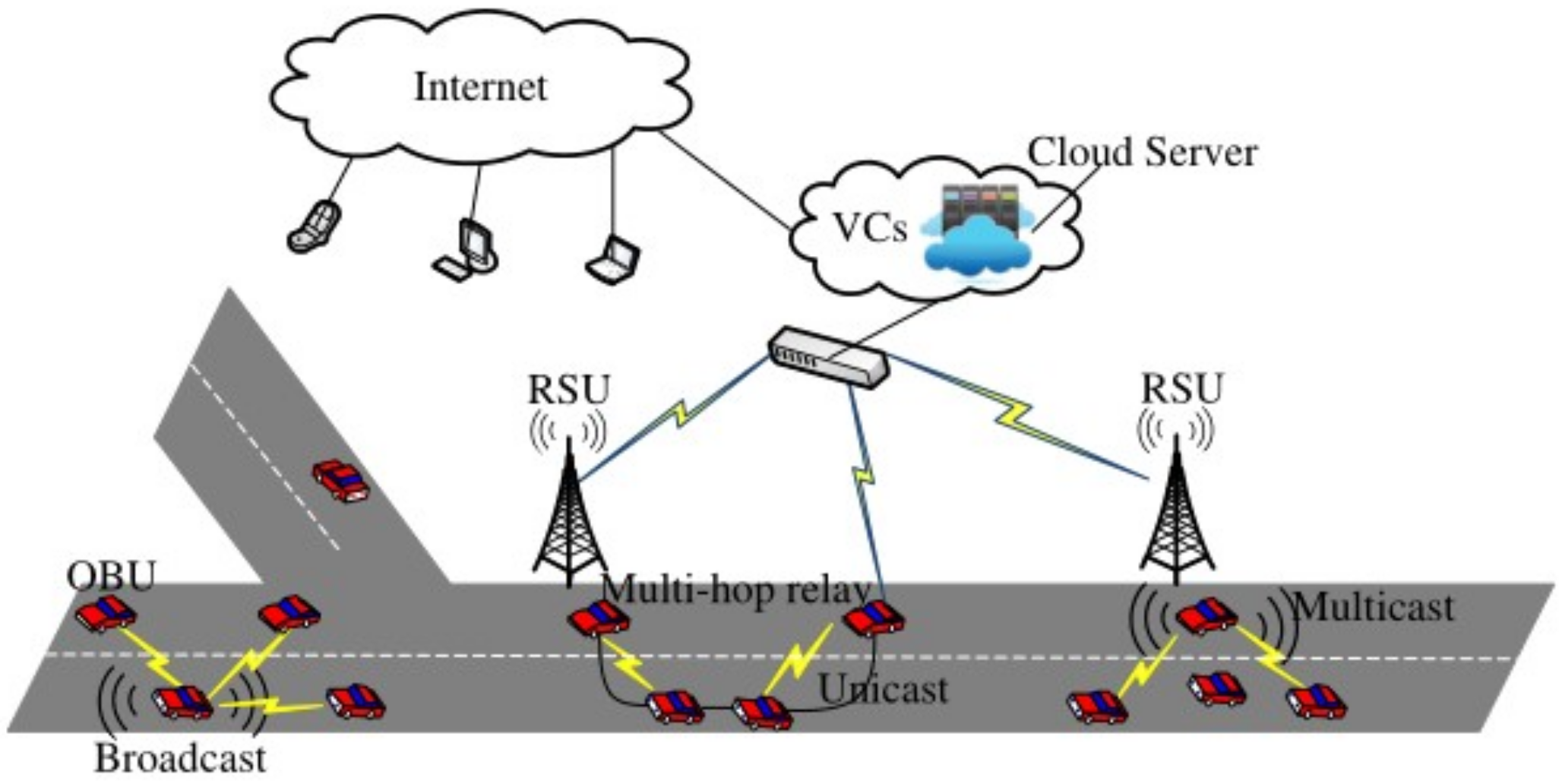
3]. The VANET is composed of vehicles equipped with wireless communication equipment and RSUs fixed on the road. The VANET architecture is shown in
Figure 1 [
4]. It mainly broadcasts information through V2V and V2R to support various applications such as road safety information, traffic management and network entertainment [
5]. The media access control (MAC) protocol in a VANET plays a decisive role in channel resource sharing and conflict management during the communication process, which is of great significance to ensure the reliability of communication and that it occurs in real time [
6]. However, the characteristics of short transmission distance between vehicles on the road, rapid movement of nodes and frequent changes in network topology can easily lead to many problems such as hidden terminals, exposed terminals, access collisions and merging collisions in mobile ad hoc networks. The traditional MAC protocol cannot meet the current needs of a VANET, so it is necessary to design new MAC protocols to improve the fairness and reliability of wireless channel access.
A binary backoff rule is proposed in the standard MAC protocol IEEE802.11p [
7], and nodes transmit data when the channel is idle through competition. When there are multiple vehicles sending data at the same time, it is easy to cause collisions and transmission failures. All colliding nodes cannot receive data packets and have to reaccess the channel, which causes a large access delay [
8]. In addition, since IEEE802.11p does not have a request to send/clear-to-send mechanism [
9] during packet broadcast, the problem of hidden terminals can easily happen.
In order to make up for the deficiencies of IEEE802.11p, some contention-free MAC protocols based on frequency division multiple access (FDMA), code division multiple access (CDMA) and time division multiple access (TDMA) have been proposed to improve the data transmission rate in a VANET [
10,
11]. In the MAC protocol based on FDMA, there are technical problems such as frequency synchronization and Doppler effect when the communication vehicles need to be synchronized to the same channel frequency [
12], so FDMA technology is not suitable for a VANET. In the MAC protocol based on CDMA, vehicles in the same communication range share the same frequency channel for multichannel communication through the pseudo-random noise code of the unique code sequence [
13]. This method is too complex for the implementation of protocols suitable for real traffic scenes requiring high reliable transmission [
14]. Neither of the above two MAC protocols can meet the strict quality of service (QoS) requirements in a VANET. Therefore, TDMA-based MAC protocols have been proposed in recent years. In TDMA-based MAC protocols, multiple vehicles use the same frequency channel resources to communicate without interference from neighbor vehicles. The main idea of the TDMA protocol is to divide the time into several identical frames, then divide the frames into a fixed number of time slots, and assign time slots to each vehicle node to transmit information to effectively avoid the problem of hiding and exposing terminals when nodes compete for time slots. Currently, there are two scheduling schemes for MAC protocols based on the TDMA mechanism, one is centralized TDMA and the other is distributed TDMA. In the MAC protocol of centralized TDMA [
15,
16,
17,
18,
19,
20], time slots are centrally allocated by the selected central vehicles or roadside RSUs equipment. The centralized MAC protocol requires the support of a large number of RSUs, which has high requirements for channel and high resource consumption.
The distributed TDMA-MAC protocol does not require intermediate nodes to allocate time slots for competing vehicles within the vehicle communication range, but randomly selects time slots from unused time slots to send information by listening to the time slot occupancy of neighboring vehicles. In the VeMAC [
21,
22,
23] protocol, the time slots in a frame are divided into three sets of time slots L, R and F, and the beacon is broadcast by dividing disjoint time slot sets for vehicles traveling in the opposite direction and the RSU to reduce transmission collisions. In the DTDMA protocol proposed in [
24], the data traffic is divided into multiple access categories, and a more complex random access strategy is also developed. In VeMAC and DTDMA, a random selection strategy has been adopted when the vehicle accesses the time slot, which can effectively solve problems of concurrent access channel. However, due to the fixed size of the time slot division in one frame, the scalability of vehicle accessing the time slot is so poor that is not enough to deal with the time slot access in extreme cases. When the node density is higher or lower, it will cause more collisions or waste of time slot resources. In the MoMAC protocol [
25],
L and
R are further divided into smaller subsets. When the vehicle changes its driving lane, the occupied time slot also changes. Thus, the MoMAC protocol is too complicated to achieve good results. Based on VeMAC, a near-conflict-free reserved MAC protocol (CFR-MAC in [
26]) has been proposed. In this protocol, vehicle nodes select the time slot they want to occupy and broadcast the information of reserving the time slot. However, the delay of time slot reservation becomes longer with the increase of node density and whether the time slot is successfully reserved can only be known after one frame. In the SAMD protocol [
27], a time slot reservation allocation scheme based on vehicles’ moving direction is proposed. SAMD is a hybrid protocol, which combines TDMA and CSMA/CA mechanism to divide the time slots in a frame into RS and CS time slot sets. Then, the RS set is divided into two sets based on vehicles’ driving direction and the time slots are dynamically divided according to the number of vehicles in different driving directions. The ratio of the number of time slots in two sets on RS is equal to the ratio of the traffic density in the opposite direction. In this way, the allocation of the left and right time slot sets can be dynamically adjusted. The nodes in the CS time slot set compete to acquire time slots and to reserve time slots on the service channel to send non-safety information. The SAMD protocol improves the scalability of the protocol by dynamically dividing time slots. However, due to the fast speed of vehicles and frequent changes in network topology, there may be hidden terminal problems between vehicles when dynamically adjusting time slots. The BMA protocol is also optimized based on the VeMAC protocol in [
28], which is different from dividing time slots according to driving direction in VeMAC. In BMA, the time slots in a frame are firstly divided into high-density areas and low-density areas according to the vehicle density, and then each density area is divided into two time-slot groups with the median value of the node speed as the critical value. When multiple vehicles have access collision or merge collision, the vehicle node with the largest difference from the median speed in the same density area occupies the time slot.
This paper proposes an adaptive slot access MAC protocol (ASMAC) in a distributed VANET to solve the problem of slot depletion or waste caused by more or less vehicle nodes in a fixed divided slot set under unbalanced traffic density. In the ASMAC protocol, time slots are divided into two sets and vehicles select the corresponding time slot to access according to their driving direction, which effectively avoids collisions between vehicles traveling in the opposite direction. During the driving process, when there are no available time slots in the time slot set due to the large number of vehicle nodes, the vehicle is allowed to obtain the available time slots in the reverse time slot set according to the size of the time slot index. In this way, the adaptive access of time slots is realized. For the collision problem during driving, one vehicle node is selected to continue to occupy the time slot according to the driving speed and direction of the vehicle, while the other vehicles reselect the time slot to access. Thus, it can improve the slot access rate and reduce collisions between vehicles. Compared with the VeMAC and SAMD protocols, the experimental results show that the ASMAC protocol has a higher packet reception rate and lower number of collisions.
The framework of this paper is as follows: In
Section 2, we describe the system model.
Section 3 introduces the design of the ASMAC protocol. We analyze the performance of the ASMAC protocol in
Section 4, and in
Section 5, simulation experiments are carried out to evaluate the performance of the ASMAC protocol. Finally, we summarize the work of this paper.
2. System Model
In this section, we introduce the system model of the ASMAC protocol, which includes the protocol direction, slot division, neighbor table and slot array. Single-channel communication is used in the ASMAC protocol. Each vehicle is equipped with signal transceiver equipment and a GPS device. Through these devices, the vehicle can determine its basic driving status information such as position, speed and driving direction, and it communicates with neighboring vehicles by receiving or sending wireless signals. Based on TDMA, the time is divided into frames and then the frames are divided into time slots. Each vehicle occupies a time slot and periodically broadcasts the occupancy information of time slot and driving status information.
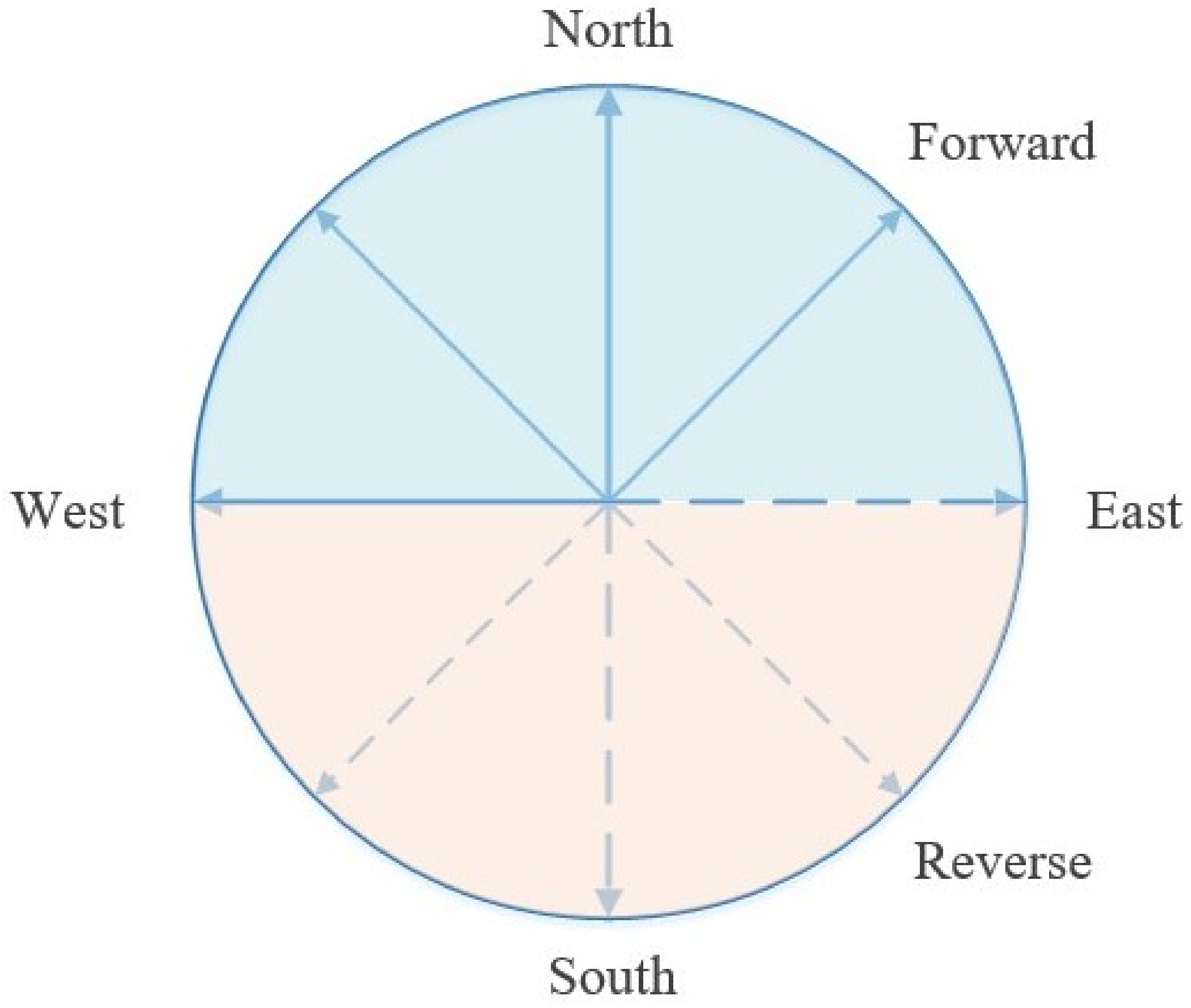
In the ASMAC protocol proposed in this paper, the VANET is composed of vehicles traveling in opposite directions on a two-way traffic road. The directions in ASMAC are defined according to the driving direction of the vehicle in the GPS, as shown in
Figure 2 [
21]. Among them, vehicles traveling from east or west to north are called forward vehicles, and vehicles traveling from east or west to south are called reverse vehicles. Vehicles in two directions are defined as two sets: the forward-driving vehicles are the set
and the reverse-moving vehicles are the set
. Since the relative speed between vehicles traveling in opposite directions is relatively large, collisions are more likely to occur. Therefore, the time slot is divided according to the two sets of vehicles’ traveling directions, which can effectively avoid the collision problem between vehicles traveling in opposite directions.
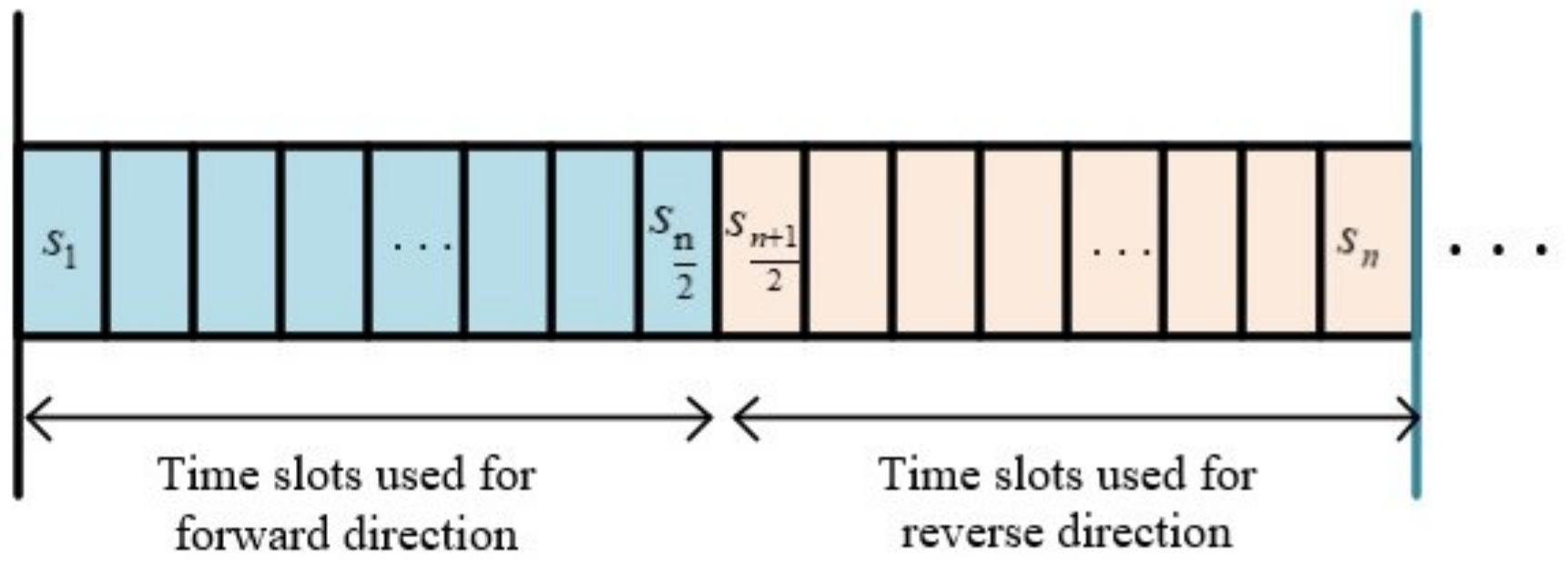
The frame is divided into n time slots based on TDMA, and each time slot is numbered
(
). Let us divide each frame into two time slot sets
and
, which are, respectively, associated with the forward-driving vehicle and the reverse-driving vehicle sets. The former time slot set is allocated to the forward-driving vehicles, and the latter time slot set is allocated to the reverse-driving vehicles, as shown in
Figure 3. Since the vehicles equipped with GPS can realize the synchronization between vehicles through a 1PPS signal, vehicle nodes can determine the time slot number of the current time slot at any time. Furthermore, it periodically broadcasts the driving status information and slot usage information through the occupied time slot.
In order to facilitate the distributed information transmission, the following definitions are made to ensure that vehicle x can maintain communication with vehicle nodes within a two-hop communication range:
: a collection of all vehicle node IDs within the communication range of vehicle x;
: the set of all vehicle IDs that vehicle x can communicate with through the intermediate one-hop neighbor node;
: the time slot occupancy set of nodes within the two-hop communication range of vehicle x.
5. Simulation Experiment and Results
In this section, the proposed protocol is simulated to evaluate the protocol performance. We use NS3 and SUMO to build the simulation environment and simulate the road vehicle communication environment, in which the traffic scenes of two-way traffic and four-way traffic lanes are included. Each direction is composed of two two-way lanes. The length of each lane is set as 1000 m and 800 m, respectively, and the communication radius R is set as 100 m. Vehicles travel at a uniform speed with normally distributed speed and have the same probability when choosing the direction of travel at the intersection. For the convenience of simulation, we assume that the vehicle broadcasts the message in the ideal wireless channel, ignoring the influence of other factors and the only factor that causes the error of the message broadcast is the collision during the transmission process. The simulation parameters are shown in
Table 1.
The first simulation scenario was a two-way highway with vehicles traveling at different speeds, generating the same number of vehicles in each direction. The second simulation scenario was an intersection with four traffic roads. A range of 40–200 vehicles were randomly generated in each direction. The size of each packet was set to 512 B and the transfer rate was 12 Mbps. The performances of the three protocols were studied under equilibrium traffic density and nonequilibrium traffic density.
First, the traffic scene of a two-way expressway and a four-way intersection under balanced traffic flow were simulated using the packet acceptance rate and the number of collisions (total number of access collisions and merge collisions) generated during driving as the evaluation indicators.
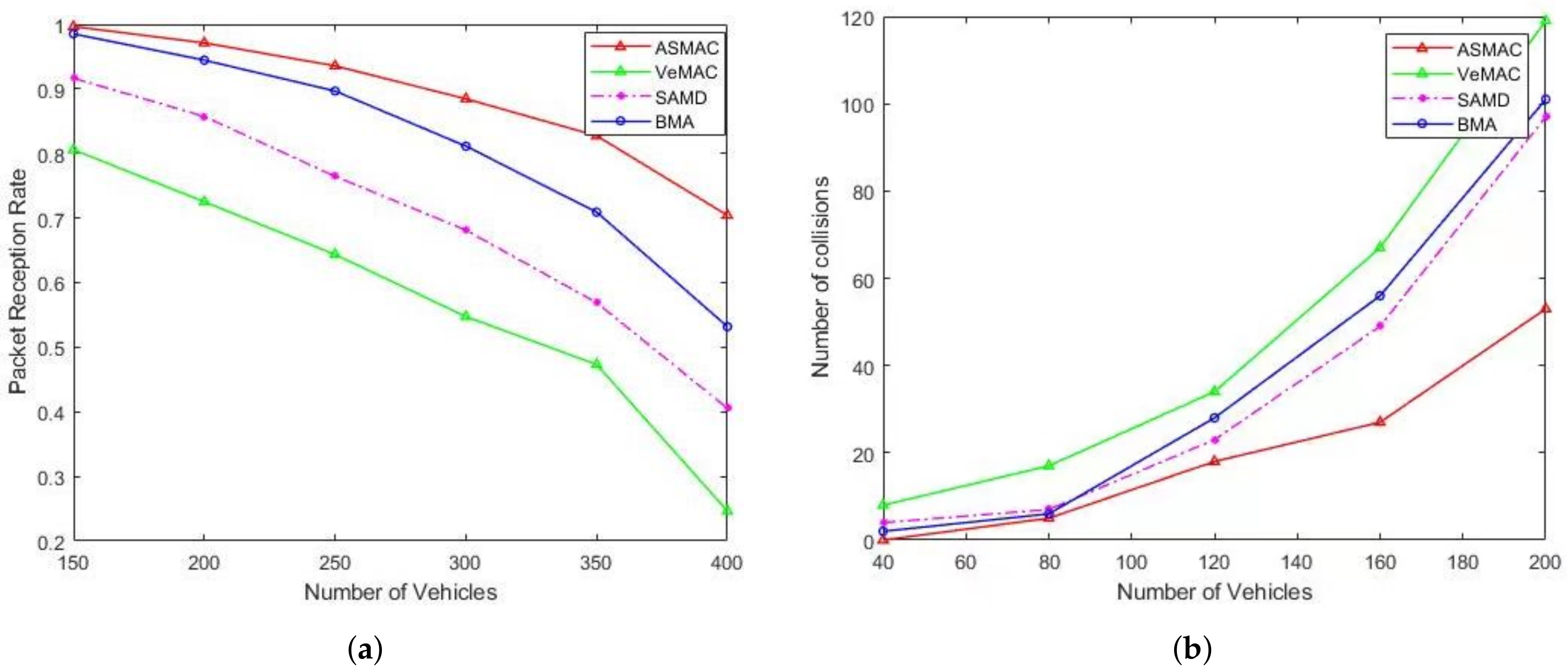
Figure 6 shows the results of the number of collisions and packet reception rate under different number of competing vehicles in the simulation process of a two-way highway. From the results in the figure, it can be seen that as the number of competing vehicle nodes increases, the number of collisions increases in all three protocols. When the number of competing vehicles is set to 200, the number of collisions in the ASMAC is reduced by 58.3%, 44.1% and 38.3% compared with the VeMAC, SAMD and BMA protocols, respectively. When the number of competing vehicles is 400, the number of collisions in the ASMAC protocol is reduced by 65.2%, 40.9% and 29.7%. This is because some time slots in VeMAC and SAMD are divided into RSU and reserved for time slots, which leads to the reduction of available time slots. Therefore, with the increase of the number of nodes competing for available time slots, a larger number of time slot access collisions occurs. With the BMA protocol, BMA divides the time slot set into two time slot groups through the median value of speed. However, when the time slot group is selected according to the vehicle speed, there are multiple vehicles with the same speed causing access collision, resulting in low data acceptance rate. In
Figure 6a, the packet reception rate of the four protocols gradually decreases with the increase of the number of vehicle nodes, but the packet reception rate of the ASMAC protocol is always higher than that of VeMAC, SAMD and MBA. Because the occurrence of collisions also affects the reception rate of data, the higher the number of collisions and the lower the reception rate of data packets.
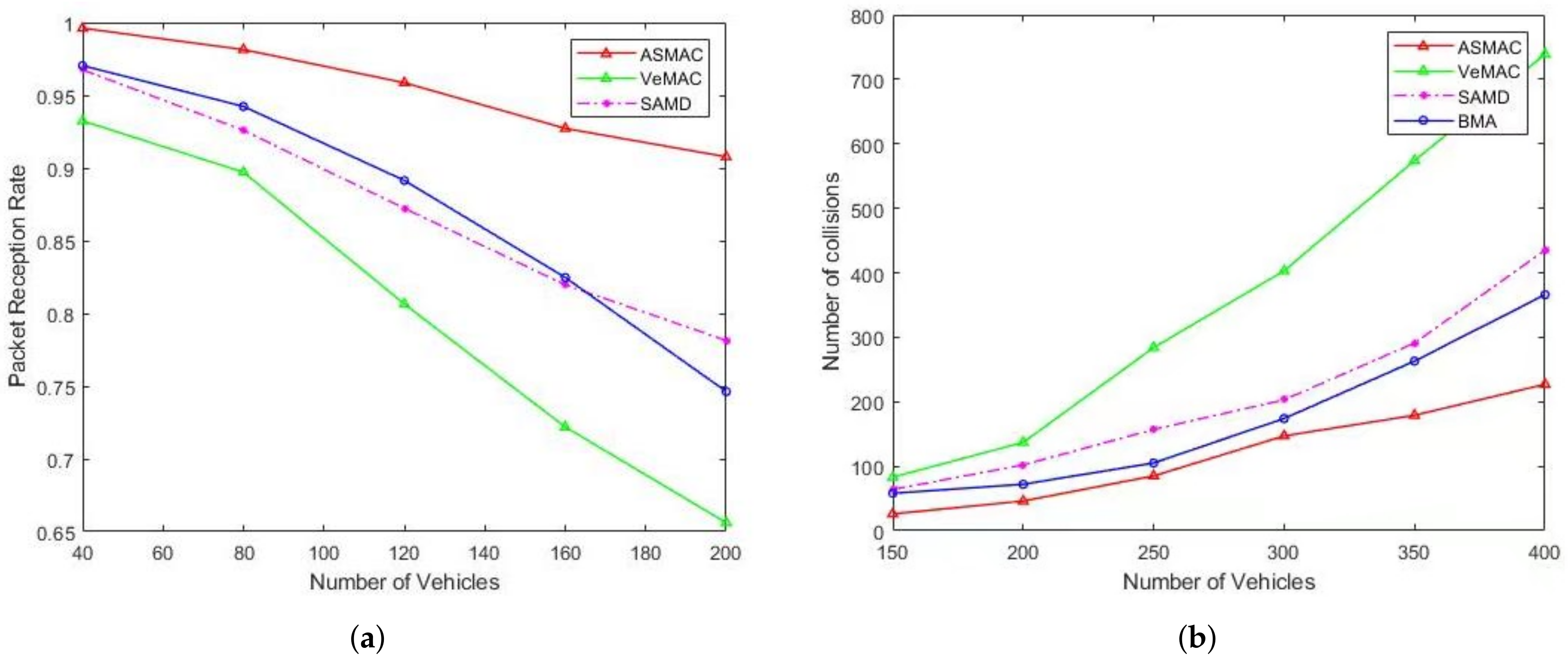
Simulations were performed in a four-way traffic scenario to evaluate the performance of the ASMAC protocol. As in the two-way traffic scenario, the same number of vehicles were generated in each direction to evaluate the number of collisions and packet reception rates for different vehicle node numbers. The simulation results are shown in
Figure 7.
From the simulation results, it can be seen that the performance of ASMAC, VeMAC, SAMD and MBA in the four-way traffic scenario is degraded compared to that of the two-way traffic scenario. When there are 200 vehicles, the number of collisions of the ASMAC protocol is 55.4%, 45% and 47% lower than the VeMAC, SAMD and MBA protocols. This is because the number of vehicle nodes increases at four-way intersections. After turning and lane changing, the vehicle needs to reacquire the time slot, resulting in an increase in time slot access collision. At the intersection, the number of merging collisions also increases, which seriously affects the performance of the MAC protocol. The SAMD and BMA protocols cannot process the vehicle in case of collision, which reduces the packet acceptance rate. In the same environment, the number of collisions of ASMAC protocol is always less than that of the VeMAC and SAMD protocols. The more vehicles, the better the performance of ASMAC.
In this paper, the performance of the three protocols in the case of unbalanced traffic flow density was studied. Firstly, we defined a parameter
r representing the traffic density ratio, which represents the ratio of the number of vehicles on the sparse side to the number of vehicles on the dense side. When
, it means that the number of vehicles on both sides is in a balanced state, while smaller
r values indicate a greater difference between the number of vehicles on both sides. The cases where the total number of generated vehicles is 200, 400 and 600 were simulated, respectively, and the reception rate of data packets was tested by using different
r values.
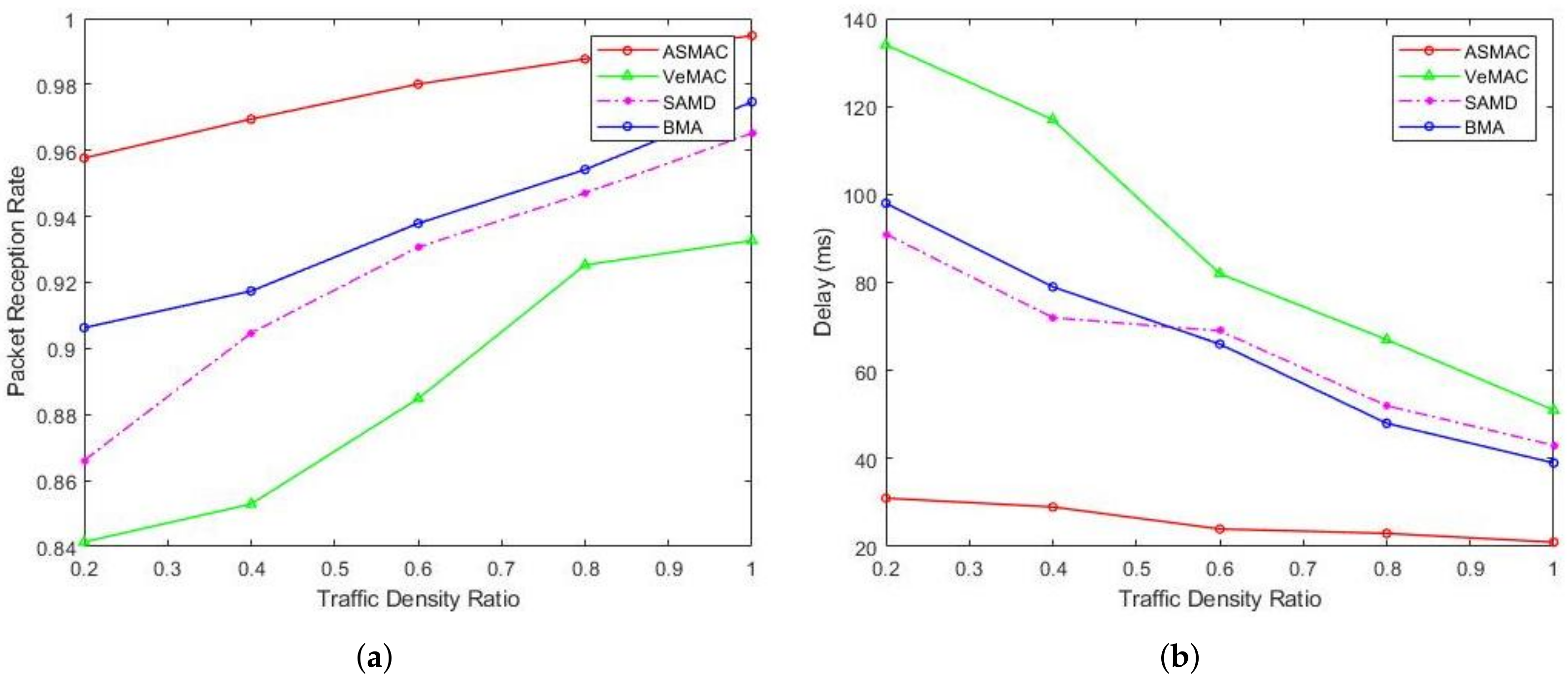
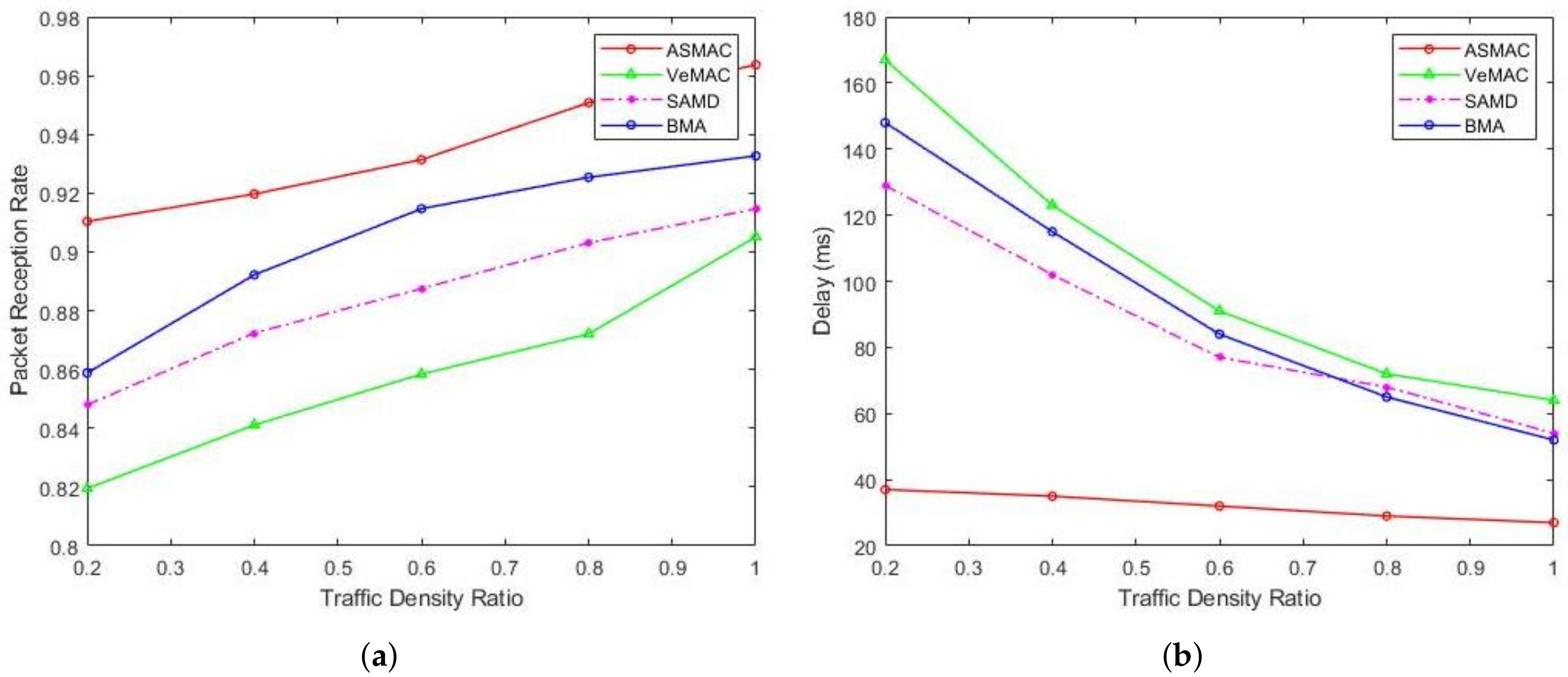
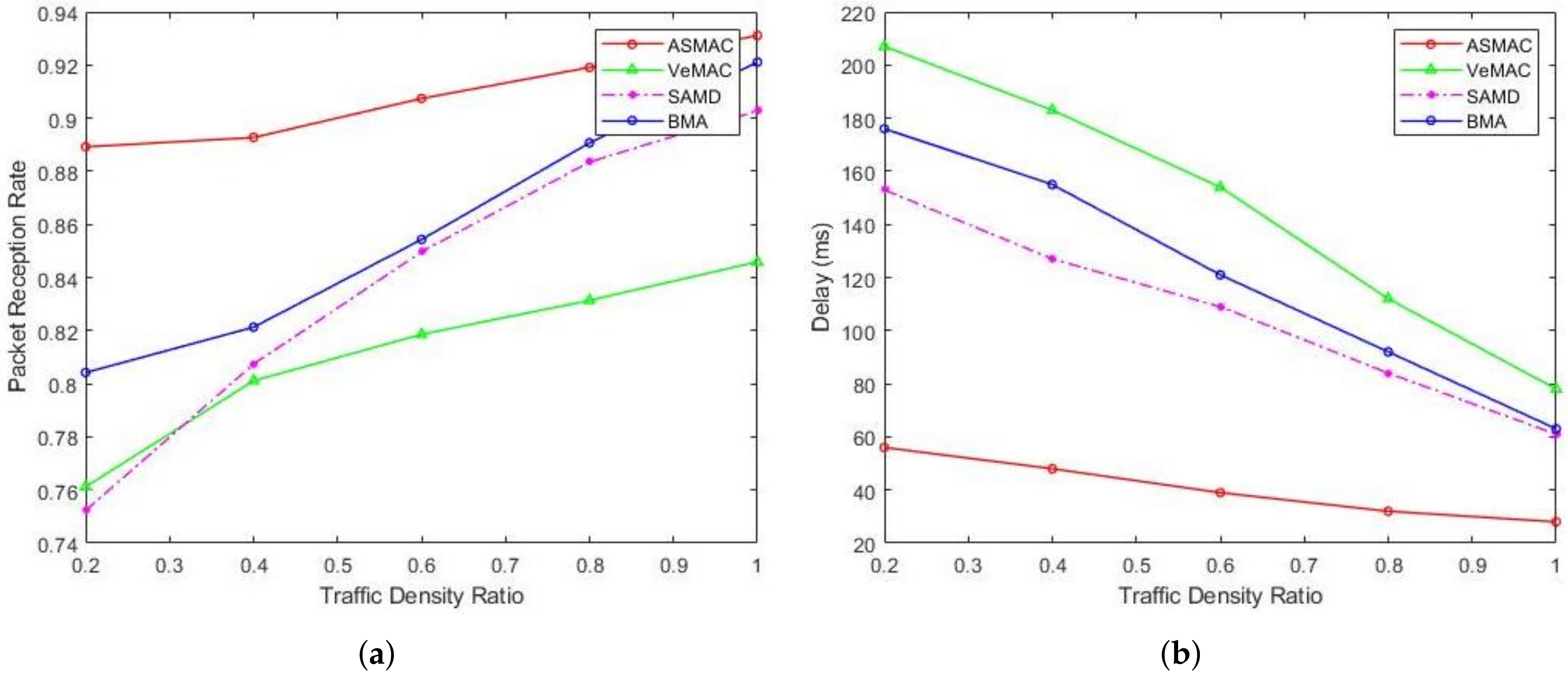
Figure 8,
Figure 9 and
Figure 10 shows the packet reception rate when the number of vehicles is 200, 400 and 600, respectively. From the simulation results, it can be seen that different traffic density ratios have a greater impact on the VeMAC protocol than on the ASMAC, SAMD and MBA protocols. When the number of vehicles is set to 200 and
r is set to 0.2, the packet reception rate in the ASMAC protocol is 11.6%, 7.1% and 5.2% higher than that in the VeMAC, SAMD and MBA protocols. When we increased the number of vehicles to 600 and
r was set to 0.2, the packet reception rate of ASMAC protocol increased by 12.8%, 13.7% and 8.5%. This is because the fixed time slot division in the VeMAC protocol makes the access collision probability higher on the side where the vehicles are denser, while the time slot resources of one sparse vehicle is wasted, resulting in a lower data packet reception rate. In the SAMD protocol, the number of left and right time slots can be dynamically divided according to the ratio of the number of nodes in the driving direction, which can effectively improve the time slot access rate. However, due to the rapid movement of vehicle nodes, it is easy to cause the merge collisions of vehicles in the opposite direction, resulting in an increase of the number of collisions. In the MBA protocol, when the node density on one side is high, the difference in vehicle speed is small. Thus, it is very easy for multiple vehicles with the same speed to compete and collide in the same time slot. In the ASMAC protocol, the vehicle on the dense side is allowed to access the time slot with the smallest time slot number in the reverse time slot set when there is no available time slot in the time slot set. In case of collision, one of the vehicles is selected to continue to use the time slot according to the driving speed. The vehicle-adaptive access to time slots improves the time slot access efficiency and avoids the waste of time slot resources.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}