
Fully Implantable Neural Stimulator with Variable Parameters



Abstract
:1. Introduction
2. Materials and Methods
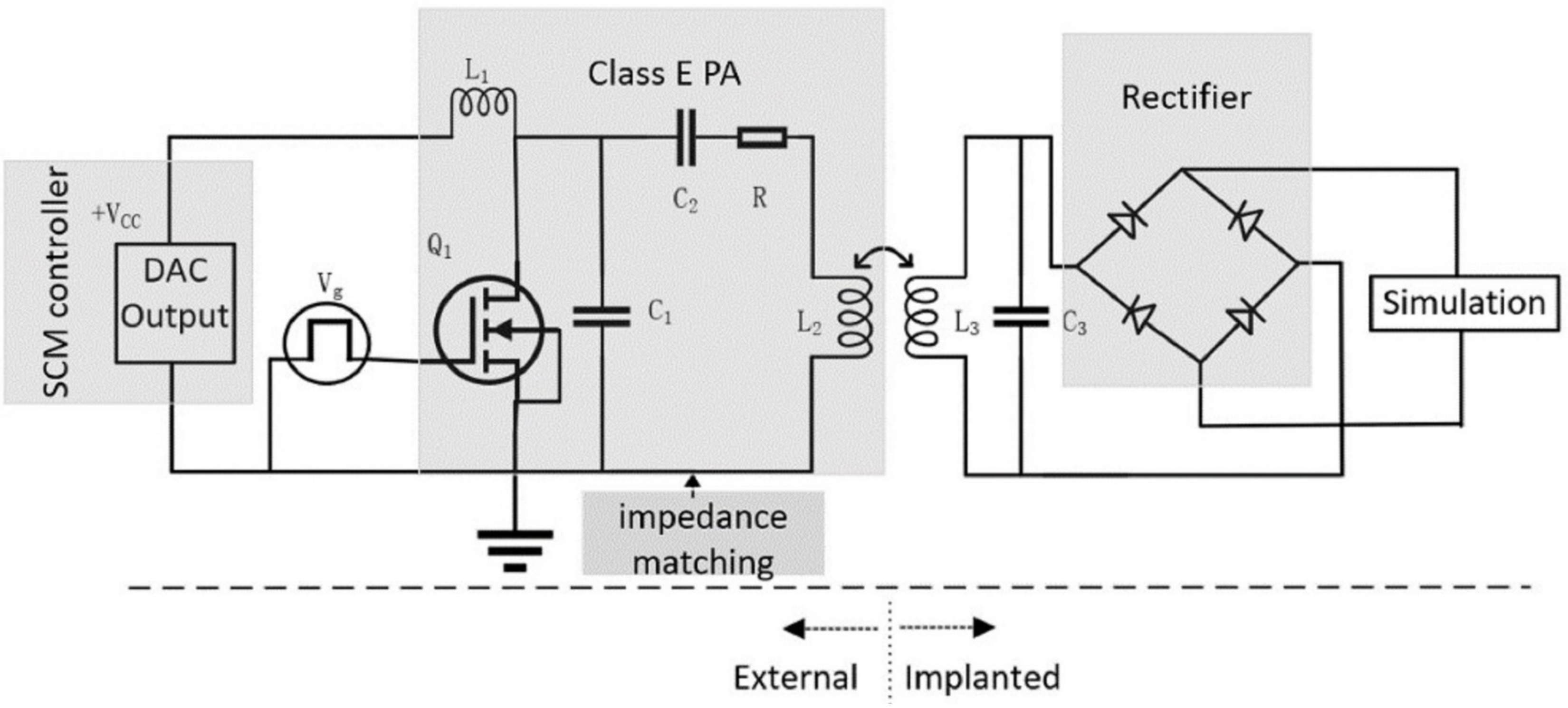
2.1. System Overview
2.2. Static Parameter Analysis
2.2.1. The External Circuit
2.2.2. The Implanted Stimulator
2.3. Dynamic Analysis
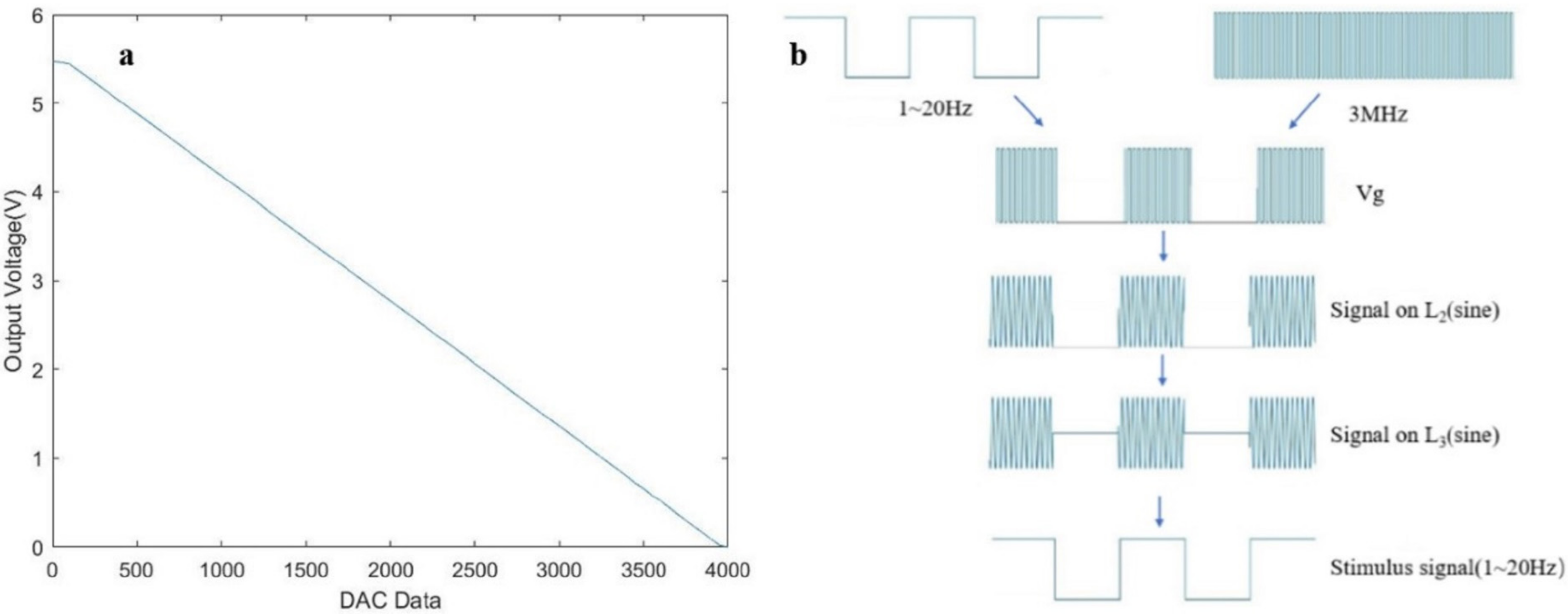
2.3.1. DAC Output
2.3.2. The Signal Modulation
3. Results
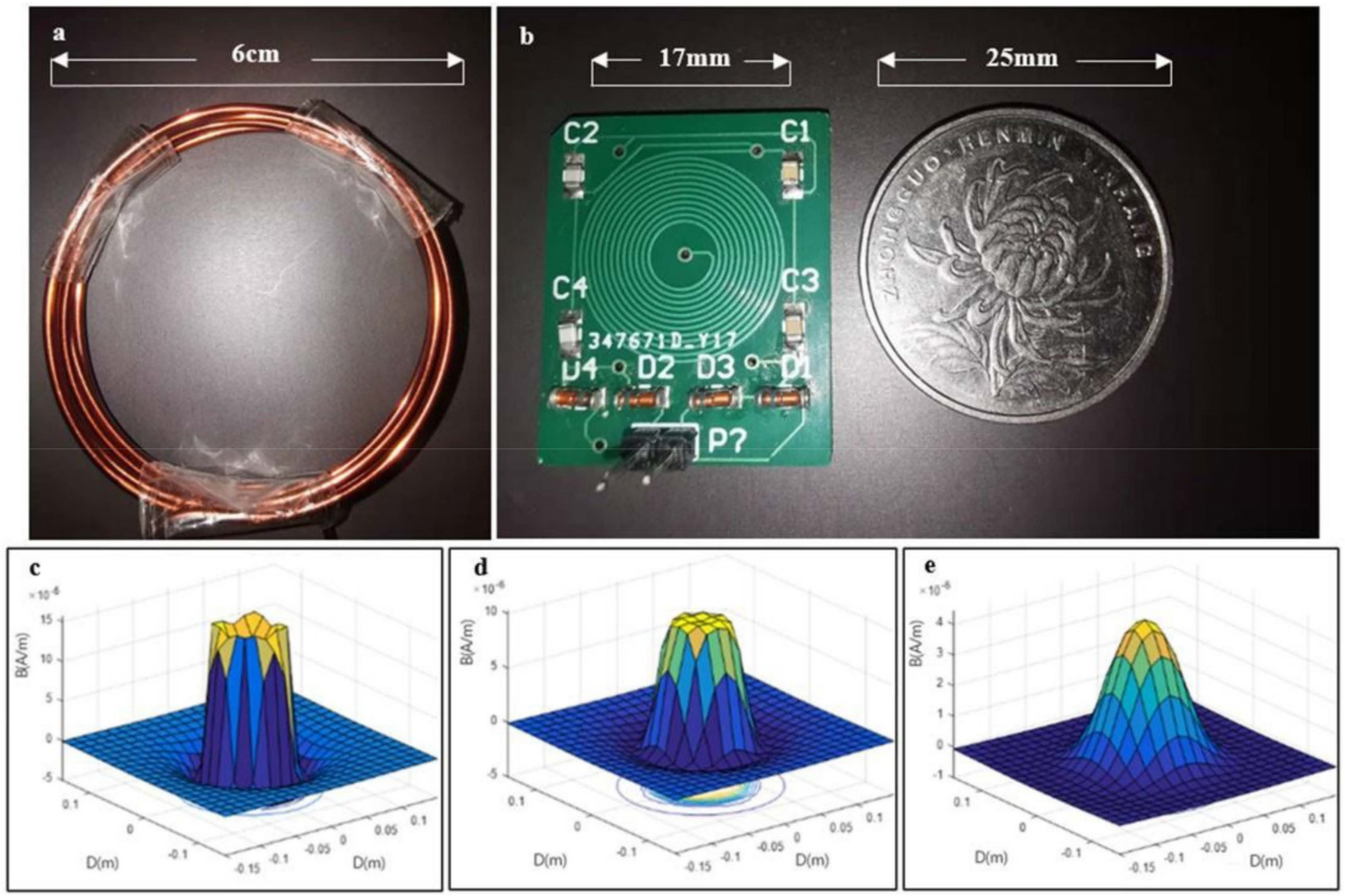
3.1. The Fabrication of Coil
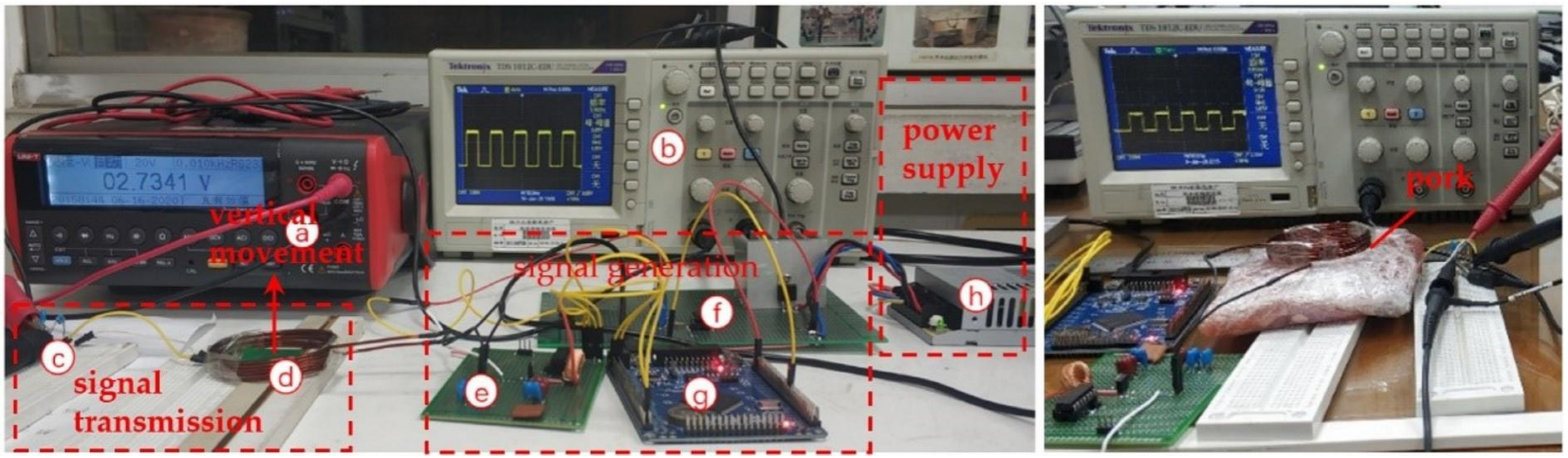
3.2. Signal Transmission Experiment
3.3. Output Performance Test
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Noble, J.; Munro, C.A.; Prasad, V.S.; Midha, R. Analysis of upper and lower extremity peripheral nerve injuries in a population of patients with multiple injuries. Trauma 1998, 45, 116–122. [Google Scholar] [CrossRef] [PubMed]
- Hadlock, T.A.; Sundback, C.A.; Hunter, D.A.; Vacanti, J.P.; Cheney, M.L. A new artificial nerve graft containing rolled Schwann cell monolayers. Microsurgery 2001, 21, 96–101. [Google Scholar] [CrossRef] [PubMed]
- Sahenk, Z.; Nagaraja, H.N.; McCracken, B.S.; King, W.M.; Freimer, M.L.; Cedarbaum, J.M.; Mendell, J.R. NT–3 promotes nerve regeneration and sensory improvement in CMT1A mouse models and in patients. J. Neurol. 2005, 65, 681–689. [Google Scholar] [CrossRef]
- Mohammad, J.; Shenaq, J.; Rabinovsky, E.; Shenaq, S. Modulation of peripheral nerve regeneration: A tissue-engineering approach. The role of amnion tube nerve conduit across a 1-centimeter nerve gap. Plast. Reconstr. Surg. 2000, 105, 660–666. [Google Scholar] [CrossRef] [PubMed]
- Koo, J.; MacEwan, M.R.; Kang, S.K.; Won, S.M.; Stephen, M.; Gamble, P.; Xie, Z.Q.; Yan, Y.; Chen, Y.Y.; Shin, J.; et al. Wireless bioresorbable electronic system enables sustained nonpharmacological neurodegenerative therapy. Nat. Med. 2018, 24, 1830. [Google Scholar] [CrossRef] [PubMed]
- Adkins-Muir, D.L.; Jones, T.A. Cortical electrical stimulation combined with rehabilitative training: Enhanced functional recovery and dendritic plasticity following focal cortical ischemia in rats. Neurol Res. 2003, 25, 780–788. [Google Scholar] [CrossRef]
- Berényi, A.; Belluscio, M.; Mao, D.; Buzsáki, G. Closed-loop control of epilepsy by transcranial electrical stimulation. Science 2012, 337, 735–737. [Google Scholar] [CrossRef] [Green Version]
- Calancie, B.; Harris, W.; Broton, J.G.; Alexeeva, N.; Green, B.A. “Threshold-level” multipulse transcranial electrical stimulation of motor cortex for intraoperative monitoring of spinal motor tracts: Description of method afnd comparison to somatosensory evoked potential monitoring. J. Neurosurg. 1998, 88, 457–470. [Google Scholar] [CrossRef] [Green Version]
- Kozák, G.; Földi, T.; Berényi, A. Chronic Transcranial Electrical Stimulation and Intracortical Recording in rats. JOVE 2018, 135, e56669. [Google Scholar] [CrossRef] [Green Version]
- Matsuyama, N.; Uwano, T.; Hori, E.; Ono, T.; Nishijo, H. Reward contingency modulates neuronal activity in rat septal nuclei during elemental and configural association tasks. Front. Behav. Neuro. 2011, 5, 26. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Xu, K.; Ye, S.; Guo, S.; Zheng, X. A remote constant current stimulator designed for rat-robot navigation. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 2168–2171. [Google Scholar]
- Xu, S.; Talwar, S.K.; Hawley, E.S.; Li, L.; Chapin, J.K. A multi-channel telemetry system for brain micro stimulation in freely roaming animals. J. Neuralsci. Methods 2004, 133, 57–63. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Huai, R.; Wang, H.; Lv, C.; Su, X. A robo-pigeon based on an innovative multi-mode telestimulation system. Bio-Med. Mater. Eng. 2015, 26, S357–S363. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ye, X.S.; Wang, P.; Liu, J.; Zhang, S.; Jiang, J.; Wang, Q.; Chen, W.; Zheng, X. A portable telemetry system for brain stimulation and neuronal activity recording in freely behaving small animals. J. Neurosci. Methods 2008, 174, 186–193. [Google Scholar] [CrossRef] [PubMed]
- Yun, S.; Kon, C.S.; Jeong, J.; Seo, J.; Ahn, S.H.; Choi, G.J.; Shim, S.; Shin, J.; Jung, H.H.; Chang, J.W.; et al. Remote-Controlled Fully Implantable Neural Stimulator for Freely Moving Small Animal. Electronics 2019, 8, 706. [Google Scholar] [CrossRef] [Green Version]
- Millard, R.E.; Shepherd, R.K. A fully implantable stimulator for use in small laboratory animals. J. Neuralsci. Methods 2007, 166, 168–177. [Google Scholar] [CrossRef] [Green Version]
- Perry, D.; Grayden, D.; Shepherd, R.; Fallon, J. A fully implantable rodent neural stimulator. J. Neural Eng. 2012, 9, 014001. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.D.; Tan, P.Z.; Sato, H.; Vo-Doan, T.T. Sideways Walking Control of a Cyborg Beetle. IEEE Trans. Med. Robot. Bionics 2020, 2, 331–337. [Google Scholar] [CrossRef]
- Vo-Doan, T.T.; Li, Y.; Cao, F.; Sato, H. Cyborg beetle: Thrust control of free flying beetle via a miniature wireless neuromuscular stimulator. In Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Estoril, Portugal, 18–22 January 2015; pp. 1048–1050. [Google Scholar] [CrossRef]
- Sanchez, C.J.; Chiu, C.-W.; Zhou, Y.; González, J.M.; Vinson, S.B.; Liang, H. Locomotion control of hybrid cockroach robots. J. R. Soc. Interface 2015, 12, 20141363. [Google Scholar] [CrossRef]
- Dirafzoon, A.; Latif, T.; Gong, F.; Sichitiu, M.; Bozkurt, A.; Lobaton, E. Biobotic motion and behavior analysis in response to directional neurostimulation. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 2457–2461. [Google Scholar] [CrossRef]
- Ho, J.S.; Yeh, A.J.; Neofytou, E.; Kim, S.; Tanabe, Y.; Patlolla, B.; Beygui, R.E.; Poon, A.S.Y. Wireless power transfer to deep-tissue microimplants. Proc. Natl. Acad. Sci. USA 2014, 111, 7974–7979. [Google Scholar] [CrossRef] [Green Version]
- Montgomery, K.L.; Yeh, A.J.; Ho, J.S.; Tsao, V.; Mohan Iyer, S.; Grosenick, L.; Ferenczi, E.A.; Tanabe, Y.; Deisseroth, K.; Delp, S.L.; et al. Wirelessly powered, fully internal optogenetics for brain, spinal and peripheral circuits in mice. Nat. Methods 2015, 12, 969–974. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, K.; Jegadeesan, R.; Guo, Y.-X.; Thakor, N.V. Wireless Power Transfer Strategies for Implantable Bioelectronics. IEEE Rev. Biomed. Eng. 2017, 10, 136–161. [Google Scholar] [CrossRef] [PubMed]
- Lu, M.C.; Ho, C.Y.; Hsu, S.F.; Lee, H.C.; Lin, J.H.; Yao, C.H.; Chen, Y.S. Effects of Electrical Stimulation at Different Frequencies on Regeneration of Transected Peripheral Nerve. Neur. Neural Repair 2007, 22, 367–373. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.-S.; Hu, C.-L.; Hsieh, C.-L.; Lin, J.-G.; Tsai, C.-C.; Chen, T.-H.; Yao, C.-H. Effects of percutaneous electrical stimulation on peripheral nerve regeneration using silicone rubber chambers. J. Biomed. Mater. Res. 2001, 57, 541–549. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, Q.; He, J.P.; Ren, H.K.; Zhou, H.L.; Zheng, K.J. A fully implanted programmable stimulator based on wireless communication for epidural spinal cord stimulation in rats. J. Neurosci. Methods 2012, 204, 341–348. [Google Scholar] [CrossRef]
- Kang, S.K.; Murphy, R.K.J.; Hwang, S.W.; Lee, S.M.; Harburg, D.V.; Krueger, N.A.; Shin, J.H.; Gamble, P.; Cheng, H.Y.; Yu, S.; et al. Bioresorbable silicon electronic sensors for the brain. Nature. 2016, 530, 71–76. [Google Scholar] [CrossRef]
- Ahmadi, M.M.; Salehi-Sirzar, M. A Self-Tuned Class-E Power Oscillator. IEEE Trans. Power Electr. 2019, 34, 4434–4449. [Google Scholar] [CrossRef]
- Kazimierczuk, M.K.; Krizhanovski, V.G.; Rassokhina, J.V.; Chernov, D.V. Class-E MOSFET tuned power oscillator design procedure. IEEE Trans. Circuits Syst. I Regul. 2005, 52, 1138–1147. [Google Scholar] [CrossRef]
- Waters, B.H.; Mahoney, B.J.; Lee, G.; Smith, J.R. Optimal coil size ratios for wireless power transfer applications. In Proceedings of the 2014 IEEE International Symposium on Circuits and Systems (ISCAS), Melbourne, Australia, 1–5 June 2014; pp. 2045–2048. [Google Scholar] [CrossRef]
- Shadid, R.; Noghanian, S. A literature survey on wireless power transfer for biomedical devices. Int. J. Antennas Propag. 2018, 2018, 4382841. [Google Scholar] [CrossRef] [Green Version]
- IEEE Standards Coordinating Committee. IEEE Standard for Safety Levels with Respect to Human Exposure to Radio Frequency Electromagnetic Fields, 3 kHz to 300 GHz; IEEE Std C95.1-2005 (Revision of IEEE Std C95.1-1991); IEEE: Manhattan, NY, USA, 2005; pp. 1–238. [Google Scholar] [CrossRef]
- Cheng, H.Y.; Vepachedu, V. Recent development of transient electronics. Theor. Appl. Mech. Lett. 2016, 6, 21–31. [Google Scholar] [CrossRef] [Green Version]
- Hwang, S.W.; Huang, X.; Seo, J.H.; Song, J.K.; Stanley, K.; Hage-Ali, S.; Chung, H.J.; Tao, H.; Omenetto, F.G.; Ma, Z.Q. Materials for Bioresorbable Radio Frequency Electronics. Adv. Mater. 2013, 25, 3526–3531. [Google Scholar] [CrossRef]
- Lyu, H.; Wang, J.; La, J.-H.; Chung, J.M.; Babakhani, A. An Energy-Efficient Wirelessly Powered Millimeter-Scale Neurostimulator Implant Based on Systematic Codesign of an Inductive Loop Antenna and a Custom Rectifier. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 1131–1143. [Google Scholar] [CrossRef] [PubMed]
- Moran, M.M.; Roy, R.R.; Wade, C.E.; Corbin, B.J.; Grindeland, R.E. Size constraints of telemeters in rats. J. Appl. Physiol. 1998, 85, 1564–1571. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [7] | [12] | [17] | [27] | This Work | |
|---|---|---|---|---|---|
| Waveform | Irregular | Single-phase pulse | Dual-phase pulse | Irregular | Single-phase pulse |
| Frequency | 0, 10, 20, 80 Hz | 100 Hz | 60 Hz | 1–255 Hz (1-Hz step) | 1–20 Hz (1-Hz step) |
| Duty cycle | N/A | 50% | 1.2% | N/A | 1–50% |
| Output voltage | 11 V | 9 V | N/A | 0.1–10 V | 0–5 V |
| Current | 0–5 mA | 15 mA | 0.6 mA | 1 mA | 5 mA |
| Average power | 30 mW | 67.5 mW | N/A | 10 mW | 25 mW |
| Items | Values | Items | Values |
|---|---|---|---|
| C1 | 1.62 nF | L1 | 200 μH |
| C2 | 0.87 nF | L2 | 3.64 μH |
| C3 | 494 pF | L3 | 5.59 μH |
| C4 | 1.63 nF | L4 | 0.88 μH |
| C5 | 1.37 nF | R | 10 Ω |
| TIM_Period | TIM_Prescaler | f (Hz) | Note | |
|---|---|---|---|---|
| 1 | 23 | 0 | 3 × 106 | carrier pulse |
| 2 | 7200 | 500 | 20 | stimulation pulse |
| 3 | 7200 | 1000 | 10 | stimulation pulse |
| 4 | 7200 | 2000 | 5 | stimulation pulse |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, T.; Zou, Y. Fully Implantable Neural Stimulator with Variable Parameters. Electronics 2022, 11, 1104. https://doi.org/10.3390/electronics11071104
Pan T, Zou Y. Fully Implantable Neural Stimulator with Variable Parameters. Electronics. 2022; 11(7):1104. https://doi.org/10.3390/electronics11071104
Chicago/Turabian StylePan, Tan, and Yuanwen Zou. 2022. "Fully Implantable Neural Stimulator with Variable Parameters" Electronics 11, no. 7: 1104. https://doi.org/10.3390/electronics11071104