





Approach for Designing Real-Time IoT Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The proposal of a methodology for designing real-time IoT systems considering the application of edge computing, fog computing, SDN (Software-Defined Networking), and NFV (Network Function Virtualization) concepts.
- An overview of the components, methods and technologies of distributed real-time systems, with particular emphasis on scheduling methods and communication protocols in the context of their applications in RTIoT systems.
- The proposal of a general RTIoT system architecture covering a broad class of applications.
2. Functional Specification Model and Synthesis of Real-Time Systems
- Developing a high-level model: The system model allows for an analysis to validate and optimize the proposed solution. This is particularly important in the case of distributed systems, where the verification of the communication and synchronization mechanisms used between processes is of significance.
- Mapping the model to the target architecture: It is possible to map to a standard architecture (e.g., a multi-core processor) or to synthesize a specialized architecture optimized for a given application.
2.1. IoT Application System Model
- Task Graph (TG): one of the simplest and most popular methods of representing functions at the system level. It is a directed acyclic graph in which nodes represent tasks and edges represent the order in which tasks are performed (usually representing transmissions). The task is activated when all preceding ones are completed. In this way, sequential dependencies between tasks are presented. Transmission volumes are represented by edge weights. A sample task graph is shown in Figure 1. The graph describes a six-task system. Tasks on the same path in the graph are sequentially executed, while tasks from parallel paths can be executed in parallel. Extended versions of task graphs can also be found in the literature, e.g., conditional task graphs and multimodal task graphs [50,51]. Such models allow for the specification of special cases, such as the conditional or alternative performance of certain tasks.
- SDF (Synchronous Data Flow) or SSDF (Statically Schedulable Data Flow): models representing data flow (often used in modeling telecommunications applications). Like the TG, SDF is a directed graph. Unlike the TG, cycles can occur in SDF. The synchronization mechanism is described by determining the number of tags generated by the execution of a given task (for each output edge). The number of tags taken from each input is also specified for each task. The task is activated if the required number of tags is available on all inputs.
- STATECHARTS: a model based on a FSM (Finite State Machine), models based on a description in the form of various forms of automation enable the specification of control flow. Unlike a classic FSM, state charts enable parallel descriptions and task specifications. Tasks are related to transitions between states.
2.2. Mapping Functional Specifications to Real-Time IoT Architecture
- Resource allocation: At this stage, the target hardware architecture of the system is determined. Resources can be processors, specialized hardware modules, and communication channels (buses, communication processors, etc.). At the same time as the allocation, the connections between system components are determined.
- Assignment of tasks to resources: This step involves assigning individual tasks to resources. Tasks are assigned to computing modules, and transmissions are assigned to communication channels. Task allocation is closely related to resource allocation. For specialized resources, only tasks corresponding to the function performed by the resource can be assigned. Transmissions must only be assigned to communication channels between resources with assigned communicating tasks. When two tasks are assigned to the same resource, transmissions between them are ignored.
- Task prioritization: Task scheduling is necessary to determine the order in which tasks are performed when more than one task is assigned to a resource. Scheduling must consider the sequential relationships between tasks. During scheduling, speed optimization is performed. In the case of real-time systems, the main goal is to arrange the execution of tasks and transmissions in such a way that all timing constraints are met (hard-constrained systems) or that timing constraint overruns are minimized (QoS maximization).
- A distributed architecture based on internet infrastructure.
- Communication through internet links, thus not ensuring that time constraints are met.
3. Selected Elements of IoT System Architecture
3.1. Edge and Fog Computing
3.2. Programmable Networks and Virtualization Techniques
3.3. Real-Time Database Systems
4. Task/Transmission Scheduling and Communication Protocols
4.1. FIFO
4.2. Static and Dynamic Task Scheduling Methods in Real-Time Systems
4.3. Communication Protocols
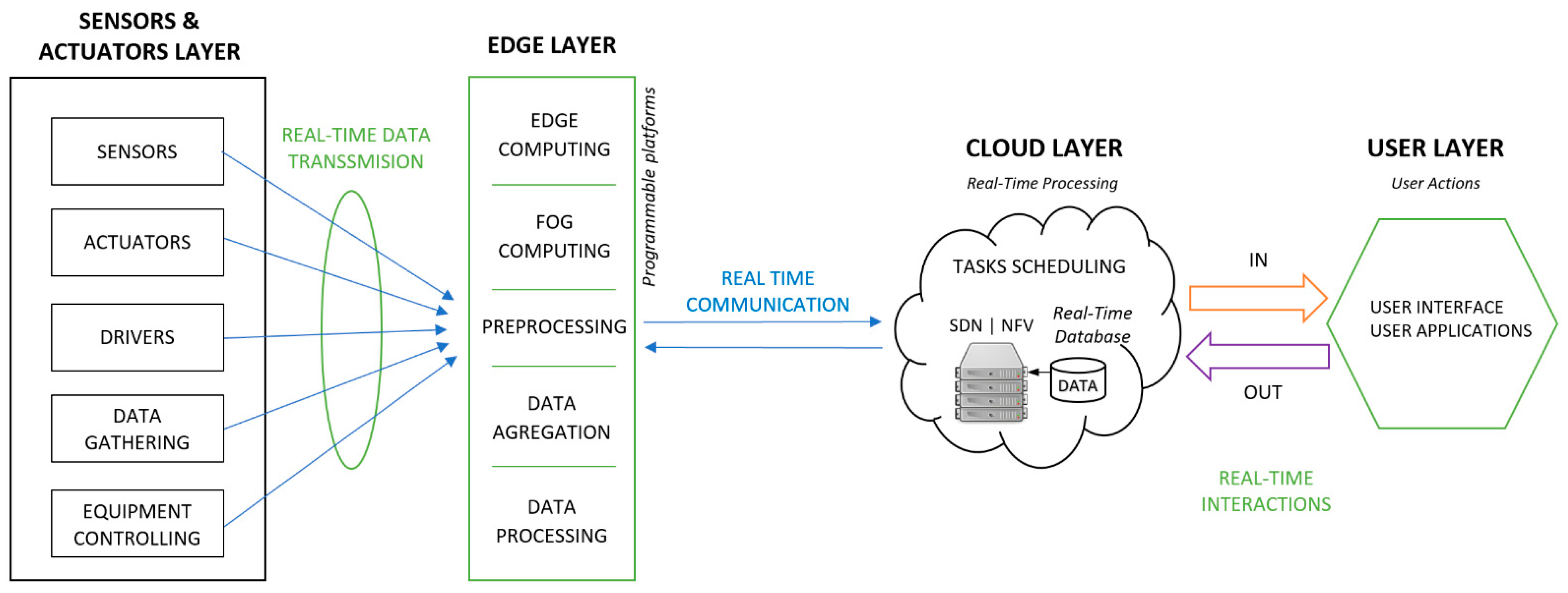
5. RTIoT System Design Methodology
- Sensor and actuator layer (SL): the layer consisting the interface between an IoT system and its environment that enables the collection of data from the environment and the control of the elements of the environment.
- Edge layer (EL) (optional): an intermediate layer that enables the distributed processing of data without the need to send them to a central system server.
- Cloud layer (CL): the layer that contains the system’s servers and databases and that usually controls the operation of the entire system.
- User layer (UL): the layer that uses user applications (mobile, web or desktop). These applications allow a user to interact with the rest of the IoT system.
5.1. System Specifications
- Maximum frequency of graph activation: This attribute specifies the maximum frequency of appearance of input events that cause the execution of functions represented by a given TG.
- Maximum number of TG instances: This attribute specifies the maximum number of simultaneous instances of the task graph. This corresponds to the maximum number of simultaneous events that cause the activation of the functions described by the TG.
- A set of time constraints: The time constraints are associated with the selected paths in the task graph and define the maximum time in which all tasks must be completed from the activation of the task that starts the path to the completion of the task that ends the path.
- For each task, an attribute is specified that assigns the task to a specific layer of the architecture. This attribute is defined by the designer.
5.2. Mapping Specifications to RTIoT System Architecture
5.3. RTIoT System Optimization
- Maximum number of instances of a given graph: This parameter determines the maximum load on the system in terms of the number of simultaneously activated tasks.
- Maximum processing time (deadline): This parameter specifies the maximum time that can elapse from the start of the tstart task to the completion of the tstop task. For a given system, there can be multiple time constraints that define different paths in task graphs. For soft-real-time systems, a soft constraint is defined as and a hard constraint is defined as .
- Transmissions are carried out over shared internet links: To ensure predictable transmission times, it is necessary to develop routing methods that consider the required order and priority of transmissions.
- Individual tasks and transmissions are assigned to resources distributed over the internet. Therefore, in order to execute them in the required order, it is necessary to use time synchronization mechanisms. This can be accomplished by developing appropriate communication protocols.
6. Conclusions
- Four-layer generic RTIoT system architecture model.
- Functional specification method in the form of a set of task graphs with assignment of tasks to IoT architecture layers.
- A method for mapping functional specifications into an RTIoT system architecture.
- Requirements for communication protocols and routing methods used in RTIoT systems.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qadri, Y.A.; Nauman, A.; Zikria, Y.B.; Vasilakos, A.V.; Kim, S.W. The Future of Healthcare Internet of Things: A Survey of Emerging Technologies. IEEE Commun. Surv. Tutor. 2020, 22, 1121–1167. [Google Scholar] [CrossRef]
- Sadhukhan, P. An IoT-based E-Parking System for Smart Cities. In Proceedings of the 2017 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Udupi, India, 13–16 September 2017. [Google Scholar]
- Płaza, M.; Belka, R.; Szcześniak, Z. Towards a different world–On the potential of the internet of everything. IAPGOS 2019, 2, 8–11. [Google Scholar] [CrossRef]
- Shuja, J.; Humayun, M.A.; Alasmary, W.; Sinky, H.; Alanazi, E.; Khan, M.K. Resource efficient geo-textual hierarchical clustering framework for social IoT applications. IEEE Sens. J. 2021, 21, 25114–25122. [Google Scholar] [CrossRef]
- Khanna, A. IoT based Smart Parking System. In Proceedings of the 2016 International Conference on Internet of Things and Applications (IOTA), Maharashtra Institute of Technology, Pune, India, 22–24 January 2016. [Google Scholar]
- Ahmad, I.; Pothuganti, K. Design & implementation of real time autonomouscar by using image processing & IoT. In Proceedings of the 2020 Third International Conference on Smart Systems and Inventive Technology (ICSSIT 2020), Tirunelveli, India, 20–22 August 2020. [Google Scholar]
- Belka, R.; Deniziak, S.; Płaza, M.; Hejduk, M.; Pięta, P.; Płaza, M.; Czekaj, P.; Wołowiec, P.; Ludwinek, K. Integrated visitor support system for tourism industry based on IoT technologies. In Proceedings of the SPIE 2018, Applications in Astronomy, Communications, Industry, and High-Energy Physics Experiments, Wilga, Poland, 26 May–4 June 2018; p. 108081J. [Google Scholar] [CrossRef]
- Pięta, P.; Deniziak, S.; Belka, R.; Płaza, M.; Płaza, M. Multi-domain model for simulating smart IoT-based theme parks. In Proceedings of the SPIE 2018, Photonics Applications in Astronomy, Communications, Industry, and High-Energy Physics Experiments, Wilga, Poland, 26 May–4 June 2018; p. 108082T. [Google Scholar] [CrossRef]
- Ivankova, G.V.; Mochalina, E.P.; Goncharova, N.L. Internet of Things (IoT) in logistics. IOP Conf. Ser. Mater. Sci. Eng. 2020, 940, 1–7. [Google Scholar] [CrossRef]
- Song, Y.; Yu, F.R.; Li Zhou, F.; Yang, X.; He, Z. Applications of the Internet of Things (IoT) in Smart Logistics: A Comprehensive Survey. IEEE Internet Things J. 2021, 8, 4250–4274. [Google Scholar] [CrossRef]
- Muangprathub, J.; Boonnam, N.; Kajornkasirat, S.; Lekbangpong, N.; Wanichsombat, A.; Nillaor, P. IoT and agriculture data analysis for smart farm. Comput. Electron. Agric. 2019, 156, 467–474. [Google Scholar] [CrossRef]
- Płaza, M.; Belka, R.; Płaza, M.; Deniziak, S.; Pięta, P.; Doszczeczko, S. Analysis of feasibility and capabilities of RTLS systems in tourism industry. In Proceedings of the SPIE 2018, Photonics Applications in Astronomy, Communications, Industry, and High-Energy Physics Experiments, Wilga, Poland, 26 May–4 June 2018; p. 108080C. [Google Scholar] [CrossRef]
- Kodali, R.K.; Rajanarayanan, S.C.; Koganti, A.; Boppana, L. IoT based security system. In Proceedings of the TENCON 2019–2019 IEEE Region 10 Conference (TENCON), Kochi, India, 17–20 October 2019. [Google Scholar]
- Kang, B.; Park, S.; Lee, T.; Park, S. IoT-based monitoring system using tri-level context making model for smart home services. In Proceedings of the 2015 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 9–12 January 2015. [Google Scholar]
- Chen, X.-Y.; Jin, Z.-G. Research on Key Technology and Applications for Internet of Things. Phys. Procedia 2012, 33, 561–566. [Google Scholar] [CrossRef]
- Balandina, E.; Balandin, S.; Koucheryavy, Y.; Mouromtsev, D. IoT Use Cases in Healthcare and Tourism. In Proceedings of the 2015 IEEE 17th Conference on Business Informatics, Lisbon, Portugal, 13–16 July 2015. [Google Scholar]
- Philip, B.V.; Alpcan, T.; Jin, J.; Palaniswami, M. Distributed Real-Time IoT for Autonomous Vehicles. IEEE Trans. Ind. Inform. 2019, 15, 1131–1140. [Google Scholar] [CrossRef]
- Saraf, S.B.; Gawali, D.H. IoT Based Smart Irrigation Monitoring And Controlling System. In Proceedings of the 2017 2nd IEEE International Conference On Recent Trends in Electronics Information & Communication Technology (RTEICT), Bangalore, India, 19–20 May 2017. [Google Scholar]
- Pawar, S.; Kithani, V.; Ahuja, S.; Sahu, S. Smart Home Security using IoT and Face Recognition. In Proceedings of the 2018 Fourth International Conference on Computing Communication Control and Automation (ICCUBEA), Pune, India, 16–18 August 2018. [Google Scholar]
- Lu, D.; Teng, Q. Application of Cloud Computing and IoT in Logistics. J. Softw. Eng. Appl. 2012, 5, 204–207. [Google Scholar] [CrossRef] [Green Version]
- Ebling, M.R.; Watson, J. IoT: From Sports to Fashion and Everything In-Between. IEEE Pervasive Comput. 2016, 15, 2–4. [Google Scholar] [CrossRef]
- Tianxiang, Z. A Mobile Architecture to Real-time Device Safety Monitoring of Amusement Park Ride Based on the Internet of Things. Contemp. Logist. 2011, 5, 42–46. [Google Scholar]
- Isyanto, H.; Arifin, A.S.; Suryanegara, M. Design and Implementation of IoT-Based Smart Home Voice Commands for disabled people using Google Assistant. In Proceedings of the 2020 International Conference on Smart Technology and Applications (ICoSTA), Surabaya, Indonesia, 20 February 2020. [Google Scholar]
- Patel, S.; Kumar, P.; Garg, S.; Kumar, R. Face Recognition based smart attendance system using IoT. Int. J. Comput. Sci. Eng. 2018, 6, 871–877. [Google Scholar] [CrossRef]
- Avatefipour, O.; Sadry, F. Traffic Management System Using IoT Technology-A Comparative Review. In Proceedings of the 2018 IEEE International Conference on Electro/Information Technology (EIT), Rochester, MI, USA, 3–5 May 2018. [Google Scholar]
- Płaza, M.; Deniziak, S.; Płaza, M.; Belka, R.; Pięta, P. Analysis of parallel computational models for clustering. In Proceedings of the SPIE 2018, Photonics Applications in Astronomy, Communications, Industry, and High-Energy Physics Experiments, Wilga, Poland, 3–10 June 2018; p. 108081O. [Google Scholar] [CrossRef]
- Pradityo, F.; Surantha, N. Indoor Air Quality Monitoring and Controlling System Based on IoT and Fuzzy Logic. In Proceedings of the 2019 7th International Conference on Information and Communication Technology (ICoICT), Kuala Lumpur, Malaysia, 24–26 July 2019. [Google Scholar]
- Kalsoom, T.; Ahmed, S.; Rafi-ul-Shan, P.M.; Azmat, M.; Akhtar, P.; Pervez, Z.; Imran, M.A.; Ur-Rehman, M. Impact of IoT on Manufacturing Industry 4.0: A New Triangular Systematic Review. Sustainability 2021, 13, 12506. [Google Scholar] [CrossRef]
- Jayaraman, P.P.; Perera, C.; Georgakopoulos, D.; Dustdar, S.; Thakker, D.; Ranjan, R. Analytics-as-a-service in a multi-cloud environment through semantically-enabled hierarchical data processing. Softw. Pract. Exp. 2010, 47, 1139–1156. [Google Scholar] [CrossRef] [Green Version]
- Mourtzis, D.; Vlachou, E.; Milas, N. Industrial Big Data as a result of IoT adoption in Manufacturing. Procedia CIRP 2016, 55, 290–295. [Google Scholar] [CrossRef] [Green Version]
- Ramnath, S.; Javali, A.; Narang, B.; Mishra, P.; Routray, S.K. IoT based localization and tracking. In Proceedings of the 2017 International Conference on IoT and Application (ICIOT), Nagapattinam, India, 19–20 May 2017. [Google Scholar]
- Khelifi, F.; Bradai, A.; Benslimane, A.; Rawat, P.; Atri, M. A Survey of Localization Systems in Internet of Things. Mob. Netw. Appl. 2019, 24, 761–785. [Google Scholar] [CrossRef]
- Bąk, S.; Czarnecki, R.; Deniziak, S. Synthesis of real-time cloud applications for Internet of Things. Turk. J. Electr. Eng. Comput. Sci. 2015, 23, 913–929. [Google Scholar] [CrossRef]
- Intel. Intel Time Coordinated Computing Tools (Intel TCC Tools). 2022. Available online: https://www.intel.com/content/www/us/en/developer/tools/time-coordinated-computing-tools/overview.html (accessed on 10 September 2022).
- Intel. Real-Time at the Edge: Overview. 2022. Available online: https://www.intel.com/content/www/us/en/design/technologies-and-topics/iot/real-time.html (accessed on 10 September 2022).
- Lee, J.; Park, S. Time-Sensitive Network (TSN) Experiment in Sensor-Based Integrated Environment for Autonomous Driving. Sensors 2019, 19, 1111. [Google Scholar] [CrossRef] [Green Version]
- Rawat, P.; Singh, K.D.; Bonnin, J.M. Cognitive Radio for M2M and Internet of Things: A survey. Comput. Commun. 2016, 94, 1–29. [Google Scholar] [CrossRef]
- Perera, C.; Talagala, D.S.; Liu, C.H.; Estrella, J.C. Energy-Efficient Location and Activity-Aware On-Demand Mobile Distributed Sensing Platform for Sensing as a Service in IoT Clouds. IEEE Trans. Comput. Soc. Syst. 2015, 2, 171–181. [Google Scholar] [CrossRef] [Green Version]
- Lasota, M.; Deniziak, S.; Chrobot, A. Scalable Distributed Datastore for Real-Time Cloud Computing. In Federated Conference on Software Development and Object Technologies; Springer: Cham, Switzerland, 2017; Volume 511, pp. 193–207. [Google Scholar]
- Czarnecki, R.; Deniziak, S. Embedded Real-Time HTTP Server. Int. J. Comput. Netw. Inf. Secur. 2015, 5, 1–8. [Google Scholar] [CrossRef]
- Zhao, J.-C.; Zhang, J.-F.; Feng, Y.; Guo, J.-X. The Study and Application of the IoT Technology in Agriculture. In Proceedings of the 2010 3rd International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010. [Google Scholar]
- Lee, J.; Kim, J.; Kim, S.; Lim, C.; Jung, J. Enhanced distributed streaming system based on RTP/RTSP in resurgent ability. In Proceedings of the Fourth Annual ACIS International Conference on Computer and Information Science (ICIS’05), Jeju Island, Republic of Korea, 14–16 July 2005. [Google Scholar]
- Kirsche, M.; Klauck, R. Unify to bridge gaps: Bringing XMPP into the Internet of Things. In Proceedings of the 2012 IEEE International Conference on Pervasive Computing and Communications Workshops, Lugano, Switzerland, 19–23 March 2012. [Google Scholar]
- Krishnaa, G.G.; Krishnaa, G.; Bhalajia, N. Analysis of Routing Protocol for Low-Power and Lossy Networks in IoT Real Time. Appl. Procedia Comput. Sci. 2016, 87, 270–274. [Google Scholar] [CrossRef] [Green Version]
- Biswas, A.R.; Giaffreda, R. IoT and Cloud Convergence: Opportunities and Challenges. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Republic of Korea, 6–8 March 2014. [Google Scholar]
- Ahmad, S.; Malik, S.; Ullah, I.; Fayaz, M.; Park, D.-H.; Kim, K.; Kim, D.H. An Adaptive Approach Based on Resource-Awareness Towards Power-Efficient Real-Time Periodic Task Modeling on Embedded IoT Devices. Processes 2018, 6, 90. [Google Scholar] [CrossRef] [Green Version]
- Eugne, D.; Ngangue, N.; Andomaya, C. On Enhancing Technology Coexistence in theIoT Era: ZigBee and 802.11 Case. IEEE Access 2016, 4, 1835–1844. [Google Scholar]
- Stonebraker, M.; Weisberg, A. The VoltDB Main Memory DBMS. IEEE Computer Society Technical Committee on Data Engineering. 2013. Available online: http://sites.computer.org/debull/A13june/VoltDB1.pdf (accessed on 10 September 2022).
- Li, W.-J.; Yen, C.; Lin, Y.-S.; Tung, S.-C.; Huang, S.M. Just IoT Internet of Things based on the Firebase Real-time Database. In Proceedings of the 2018 IEEE International Conference on Smart Manufacturing, Industrial & Logistics Engineering (SMILE), Hsinchu, Taiwan, 8–9 February 2018. [Google Scholar]
- Deniziak, S. Design Models in SYSTEMC Language. In Technical Transactions; 1-I; Krakow University of Technology: Krakow, Poland, 2007; pp. 17–33. [Google Scholar]
- Wolf, W. High-Performance Embedded Computing, Architectures, Applications, and Methodologies; Elsevier: San Francisco, CA, USA, 2007. [Google Scholar]
- Deniziak, S.; Tomaszewski, R. Co-synthesis of contention-free energy-efficient NOC-based real time embedded systems. J. Syst. Archit. 2019, 98, 92–101. [Google Scholar] [CrossRef]
- De Donno, M.; Tange, K.; Dragoni, N. Foundations and Evolution of Modern Computing Paradigms: Cloud, IoT, Edge, and Fog. IEEE Access 2019, 7, 150936–150948. [Google Scholar] [CrossRef]
- Alrowaily, M.; Lu, Z. Secure Edge Computing in IoT Systems: Review and Case Studies. In Proceedings of the 2018 IEEE/ACM Symposium on Edge Computing (SEC), Seattle, WA, USA, 25–27 October 2018. [Google Scholar]
- Wan, S.; Ding, S.; Chen, C. Edge computing enabled video segmentation for real-time traffic monitoring in internet of vehicles. Pattern Recognit. 2022, 121, 108146. [Google Scholar] [CrossRef]
- Sun, Y.; Fei, T.; Li, X.; Warnecke, A.; Warsitz, E.; Pohl, N. Real-time radar-based gesture detection and recognition built in an edge-computing platform. IEEE Sens. J. 2020, 20, 10706–10716. [Google Scholar] [CrossRef]
- Yu, W.; Liang, F.; He, X.; Hatcher, W.G.; Lu, C.; Lin, J.; Yang, X. A Survey on the Edge Computing for the Internet of Things. IEEE Access 2017, 6, 6900–6919. [Google Scholar] [CrossRef]
- Hamdan, S.; Ayyash, M.; Almajali, S. Edge-Computing Architectures for Internet of Things Applications: A Survey. Sensors 2020, 20, 6441. [Google Scholar] [CrossRef]
- Bonomi, F.; Milito, R.; Zhu, J.; Addepalli, S. Fog Computing and its Role in the Internet of Things. In Proceedings of the First Edition of the MCC Workshop on Mobile Cloud Computing, Helsinki, Finland, August 2012; pp. 13–16. [Google Scholar]
- Oktian, Y.E.; Witanto, E.N.; Lee, S.-G. A Conceptual Architecture in Decentralizing Computing, Storage, and Networking Aspect of IoT Infrastructure. IoT 2021, 2, 205–221. [Google Scholar] [CrossRef]
- Li, J.; Jin, J.; Yuan, D.; Zhang, H. Virtual Fog: A Virtualization Enabled Fog Computing Framework for Internet of Things. IEEE Internet Things J. 2018, 5, 121–131. [Google Scholar] [CrossRef]
- Li, Y.; Xuan Phan, L.T.; Loo, B.T. Network Functions Virtualization with Soft Real-Time Guarantees. In Proceedings of the IEEE INFOCOM 2016-The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016. [Google Scholar]
- Jawdhari, H.A.; Abdullah, A.A. The Application of Network Functions Virtualization on Different Networks, and its New Applications in Blockchain: A Survey. Spec. Issue Comput. Technol. Inf. Manag. 2021, 18, 1007–1044. [Google Scholar] [CrossRef]
- Abdulqadir, H.R.; Zeebaree, S.R.M.; Shukur, H.M.; Sadeeq, M.A.M.; Salim, B.W.; Salih, A.A.; Kak, S.F. A study of moving from cloud computing to fog computing. Qubahan Acad. J. 2022, 2, 60–70. [Google Scholar] [CrossRef]
- Cao, K.; Liu, Y.; Meng, G.; Sun, Q. An overview on edge computing research. IEEE Access 2020, 8, 85714–85728. [Google Scholar] [CrossRef]
- Al-Shammari, B.K.J.; Al-Aboody, N.; Al-Raweshidy, H.S. IoT Traffic Management and Integration in the QoS Supported Network. IEEE Internet Things J. 2017, 5, 352–370. [Google Scholar] [CrossRef] [Green Version]
- Cui, L.; Xu, C.; Yang, S.; Huang, J.Z.; Li, J.; Ming, X.W.Z.; Lu, N. Joint Optimization of Energy Consumption and Latency in Mobile Edge Computing for Internet of Things. IEEE Internet Things J. 2018, 6, 4791–4803. [Google Scholar] [CrossRef]
- Atlam, H.F.; Walters, R.J.; Wills, G.B. Fog Computing and the Internet of Things: A Review. Big Data Cogn. Comput. 2018, 2, 10. [Google Scholar] [CrossRef]
- Novo, O. Blockchain Meets IoT: An Architecture for Scalable Access Management in IoT. IEEE Internet Things J. 2018, 5, 1184–1195. [Google Scholar] [CrossRef]
- Ngabo, D.; Wang, D.; Iwendi, C.; Anajemb, J.A.; Ajao, L.A.; Biamba, C. Blockchain-Based Security Mechanism for the Medical Data at Fog Computing Architecture of Internet of Things. Electronics 2021, 10, 2110. [Google Scholar] [CrossRef]
- Tayyaba, S.K.; Shah, M.A.; Khan, O.A.; Ahmed, A.W. Software Defined Network (SDN) Based Internet of Things (IoT): A Road Ahead. In Proceedings of the ICFNDS’17: Proceedings of the International Conference on Future Networks and Distributed Systems, Cambridge, UK, 19–20 July 2017; pp. 1–8. [Google Scholar]
- Mazhar, N.; Salleh, R.; Zeeshan, M.; Hameed, M.M.; Khan, N. R-IDPS: Real time SDN based IDPS system for IoT security. In Proceedings of the 2021 IEEE 18th International Conference on Smart Communities: Improving Quality of Life Using ICT, IoT and AI (HONET), Karachi, Pakistan, 11–13 October 2021. [Google Scholar]
- Hasan, K.; Wu, X.-W.; Biswas, K.; Ahmed, K. A Novel Framework for Software Defined Wireless Body Area Network. In Proceedings of the 2018 8th International Conference on Intelligent Systems, Modelling and Simulation (ISMS), Kuala Lumpur, Malaysia, 8–10 May 2018. [Google Scholar]
- Yassein, M.B.; Aljawarneh, S.; Al-Rousan, M.; Mardini, W.; Al-Rashdan, W. Combined Software-Defined Network (SDN) and Internet of Things (IoT). In Proceedings of the 2017 International Conference on Electrical and Computing Technologies and Applications (ICECTA), Ras Al Khaimah, United Arab Emirates, 21–23 November 2017. [Google Scholar]
- Li, J.; Altman, E.; Touati, C. A General SDN-based IoT Framework with NVF Implementation. ZTE Commun. 2015, 13, 42–45. [Google Scholar]
- Tang, W.; Zhang, R.; Feng, S. A Spatiotemporal Model for Hard-deadlineMulti-stream Traffic in Uplink IoT Networks. IEEE Internet Things J. 2021, 9, 601–615. [Google Scholar] [CrossRef]
- Audsley, N.C.; Burns, A.; Richardson, M.F.; Wellings, A.J. Absolute and relative temporal constraints in hard real-time databases. In Proceedings of the Fourth Euromicro Workshop on Real-Time Systems, Athens, Greece, 3–5 June 1992. [Google Scholar]
- Druid. Apache Druid Is a Real-time Database to Power Modern Analytics Applications. 2022. Available online: https://druid.apache.org/ (accessed on 10 September 2022).
- Volt Active Data. Where We Sit in the Stack. 2022. Available online: https://www.voltactivedata.com/ (accessed on 10 September 2022).
- Litwin, W.; Neimat, M.-A.; Schneider, D.A. LH*—A scalable, distributed data structure. ACM Trans. Database Syst. 1996, 21, 480–525. [Google Scholar] [CrossRef]
- Lasota, M.; Deniziak, S.; Chrobot, A. An SDDS-Based Architecture for a Real-Time Data Store. Int. J. Inf. Eng. Electron. Bus. 2016, 1, 21–28. [Google Scholar] [CrossRef]
- Hayatunnufus; Riasetiawan, M.; Ashari, A. Performance Analysis of FIFO and Round Robin Scheduling Process Algorithm in IoT Operating System for Collecting Landslide Data. In Proceedings of the 2020 International Conference on Data Science, Artificial Intelligence, and Business Analytics (DATABIA), Medan, Indonesia, 16–17 July 2020. [Google Scholar]
- Malik, S.; Ahmad, S.; Ullah, I.; Park, D.H.; Kim, D.H. An Adaptive Emergency First Intelligent Scheduling Algorithm for E cient Task Management and Scheduling in Hybrid of Hard Real-Time and Soft Real-Time Embedded IoT Systems. Sustainability 2019, 11, 2192. [Google Scholar] [CrossRef] [Green Version]
- Pereira, D.A.; Ourique de Morais, W.; Pignaton de Freitas, E. NoSQL real-time database performance comparison. Int. J. Parallel Emergent Distrib. Syst. 2017, 33, 144–156. [Google Scholar] [CrossRef]
- Kaur, K.; Sachdeva, M. Performance Evaluation of NewSQL Databases. In Proceedings of the 2017 International Conference on Inventive Systems and Control (ICISC), Coimbatore, India, 19–20 January 2017. [Google Scholar]
- Singh, R.K.; Pandey, S.; Shanker, U. A Non-Database Operations Aware Priority Ceiling Protocol for Hard Real-Time Database Systems. In Proceedings of the 2019 10th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kanpur, India, 6–8 July 2019. [Google Scholar]
- Halang, W.A.; Stoyenko, A.D. Real Time Computing; Springer: Berlin/Heidelberg, Germany, 1994; pp. 261–282. [Google Scholar]
- Abohamama, A.S.; El-Ghamry, A.; Hamouda, E. Real-Time Task Scheduling Algorithm for IoT-Based Applications in the Cloud–Fog Environment. J. Netw. Syst. Manag. 2022, 30, 54. [Google Scholar] [CrossRef]
- Koukopoulos, D. The Impact of FIFO Compositions with Other Protocols on the Stability of Multimedia Networks Facing Dynamic Adversarial Attacks. In Proceedings of the MINES’13, 2013 Fifth International Conference on Multimedia Information Networking and Security, Beijing, China, 1 November 2013; pp. 575–578. [Google Scholar]
- Kashyap, R.; Arora, K.; Sharma, M.; Aazam, A. Security-Aware GA based Practical Byzantine Fault Tolerance for Permissioned Blockchain. In Proceedings of the 2019 4th International Conference on Control, Robotics and Cybernetics (CRC), Tokyo, Japan, 27–30 September 2019. [Google Scholar]
- Xu, G.; Liu, Y.; Xing, J.; Luo, T.; Gu, Y.; Liu, S.; Zheng, X.; Vasilakos, A.V. SG-PBFT: A Secure and Highly Efficient, Blockchain PBFT Consensus Algorithm for Internet of Vehicles, Computer Science. J. Parallel Distrib. Comput. 2022, 164, 1–11. [Google Scholar] [CrossRef]
- Park, G.-L.; Shirazi, B.; Marquis, J.; Choo, H. Decisive path scheduling: A new list scheduling method. In Proceedings of the 1997 International Conference on Parallel Processing, Bloomington, IL, USA, 11–15 August 1997. [Google Scholar]
- Zonios, C.; Tenentes, V. Energy Efficient Speech Command Recognition for Private Smart Home IoT Applications. In Proceedings of the 2021 10th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 5–7 July 2021. [Google Scholar]
- Teng, S.; Zhang, W.; Zhu, H.; Fu, X.; Su, J.; Cui, B. A Least-Laxity-First Scheduling Algorithm of Variable Time Slice for Periodic Tasks. Int. J. Softw. Sci. Comput. Intell. 2012, 2, 19. [Google Scholar]
- Furst, J.; Chen, K.; Kim, H.-S.; Bonnet, P. Evaluating Bluetooth Low Energy for IoT. In Proceedings of the 2018 IEEE Workshop on Benchmarking Cyber-Physical Networks and Systems (CPSBench), Porto, Portugal, 10–13 April 2018. [Google Scholar]
- Beshley, M.; Kryvinska, N.; Beshley, H.; Yaremko, O.; Pyrih, J. Virtual Router Design and Modeling for Future Networks with QoS Guarantees. Electronics 2021, 10, 1139. [Google Scholar] [CrossRef]
- Schulzrinne, H.; Rao, A.; Lanphier, R. Real Time Streaming Protocol (RTSP). RFC 1998, 2326. [Google Scholar]
- Rhinow, F.; Veloso, P.P.; Puyelo, C.; Barrett, S.; O Nuallain, E. P2P live video streaming in WebRTC. In Proceedings of the 2014 World Congress on Computer Applications and Information Systems (WCCAIS), Hammamet, Tunisia, 17–19 January 2014. [Google Scholar]
- Jianbing, L.; Shuhui, C. The Design and Implementation of RTSP/RTP Multimedia Traffic Identification Algorithm. J. Phys. Conf. Ser. 2019, 1168, 1–8. [Google Scholar] [CrossRef]
- Saint-Andre, P. Extensible Messaging and Presence Protocol (XMPP): Core. RFC 3920, IETF. October 2004. Available online: https://www.rfc-editor.org/rfc/rfc6120 (accessed on 10 September 2022).
- Saint-Andre, P. Extensible Messaging and Presence Protocol (XMPP): Instant Messaging and Presence, RFC 3921, IETF. October 2004. Available online: http://www.kandroid.org/board/data/board/guestbook/file_in_body/1/xmpp.pdf (accessed on 10 September 2022).
- MQTT. MQTT: The Standard for IoT Messaging. 2022. Available online: https://mqtt.org (accessed on 10 September 2022).
- Bormann, C.; Castellani, A.P.; Shelby, Z. CoAP: An Application Protocol for Billions of Tiny Internet Nodes. IEEE Internet Comput. 2012, 16, 62–67. [Google Scholar] [CrossRef]
- Porcius, M.; Fortuna, C.; Kandus, G.; Mohorcic, M. Integrating custom hardware into Sensor Web.SoftCOM 2010. In Proceedings of the 18th International Conference on Software, Telecommunications and Computer Networks, Split, Croatia, 23–25 September 2010. [Google Scholar]
- Internet Engineering Task Force. The WebSocket Protocol. 2022. Available online: https://datatracker.ietf.org/doc/html/rfc6455 (accessed on 10 September 2022).
- Muller, G.L. HTML5 WebSocket Protocol and Its Application to Distributed Computing. Available online: https://arxiv.org/abs/1409.3367 (accessed on 10 September 2022).
- Ha, M.; Kim, D.; Kim, S.H.; Hong, S. Inter-MARIO: A Fast and Seamless Mobility Protocol to Support Inter-Pan Handover in 6LoWPAN. In Proceedings of the 2010 IEEE Global Telecommunications Conference GLOBECOM 2010, Miami, FL, USA, 6–10 December 2010; pp. 1–6. [Google Scholar]
- Tosi, J.; Taffoni, F.; Santacatterina, M.; Sannino, R.; Formica, D. Performance Evaluation of Bluetooth Low Energy: A Systematic Review. Sensors 2017, 17, 2898. [Google Scholar] [CrossRef] [Green Version]
- Varghese, S.G.; Kurian, C.P.; George, V.I.; John, A.; Nayak, V.; Upadhyay, A. Comparative study of zigBee topologies for IoT-based lighting automation. IET Wirel. Sens. Syst. 2019, 4, 201–207. [Google Scholar] [CrossRef]
- Haxhibeqiri, J.; De Poorter, E.; Moerman, I.; Hoebeke, J. A Survey of LoRaWAN for IoT: From Technologyto Application. Sensors 2018, 18, 3995. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.-G.; Wang, L. A Deadline-Aware Estimation of Distribution Algorithm for Resource Scheduling in Fog Computing Systems. In Proceedings of the 2019 IEEE Congress on Evolutionary Computation (CEC), Wellington, New Zealand, 10–13 June 2019. [Google Scholar]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deniziak, S.; Płaza, M.; Arcab, Ł. Approach for Designing Real-Time IoT Systems. Electronics 2022, 11, 4120. https://doi.org/10.3390/electronics11244120
Deniziak S, Płaza M, Arcab Ł. Approach for Designing Real-Time IoT Systems. Electronics. 2022; 11(24):4120. https://doi.org/10.3390/electronics11244120
Chicago/Turabian StyleDeniziak, Stanisław, Mirosław Płaza, and Łukasz Arcab. 2022. "Approach for Designing Real-Time IoT Systems" Electronics 11, no. 24: 4120. https://doi.org/10.3390/electronics11244120