
A Refined Taylor-Fourier Transform with Applications to Wideband Oscillation Monitoring
Abstract
:1. Introduction
- (1)
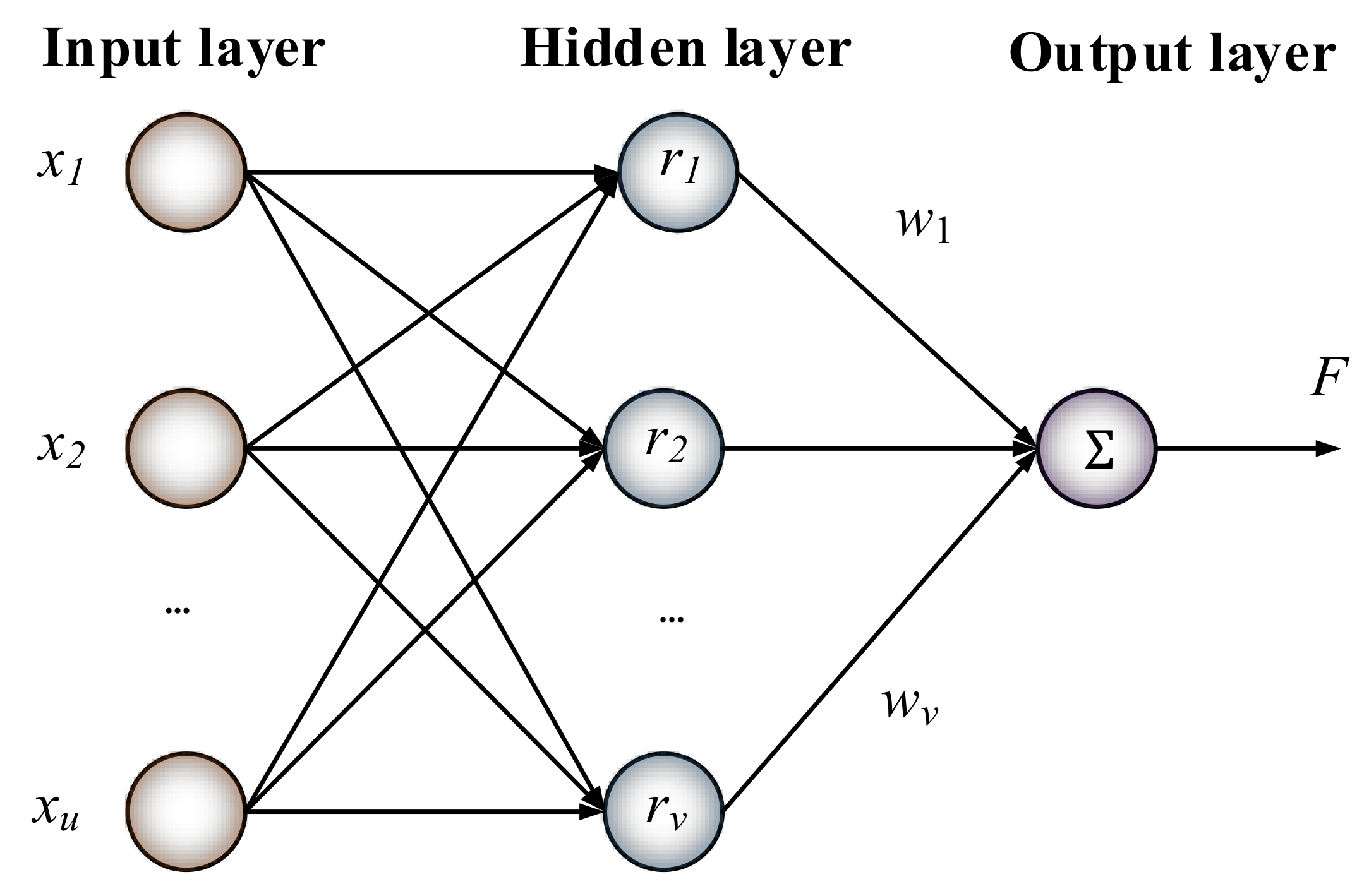
- A radial basis function (RBF) neural network is adopted to estimate the noise level, which can approximate any nonlinear function with arbitrary precision and has the advantages of global approximation capacity, compact topology, and fast convergence.
- (2)
- An adaptive window length is designed based on the noise level. The window length is designed to be longer when the SNR is low, which strikes a good balance between dynamic performance and estimation accuracy.
- (3)
- Numerous simulation tests are conducted with field data from Guyuan and Hami incidents. The results indicate that the proposed method is feasible and robust for practical applications.
2. Principle of TFT
3. Improved TFT with Adaptive Window Length
3.1. Initial Frequency
3.2. Window Length
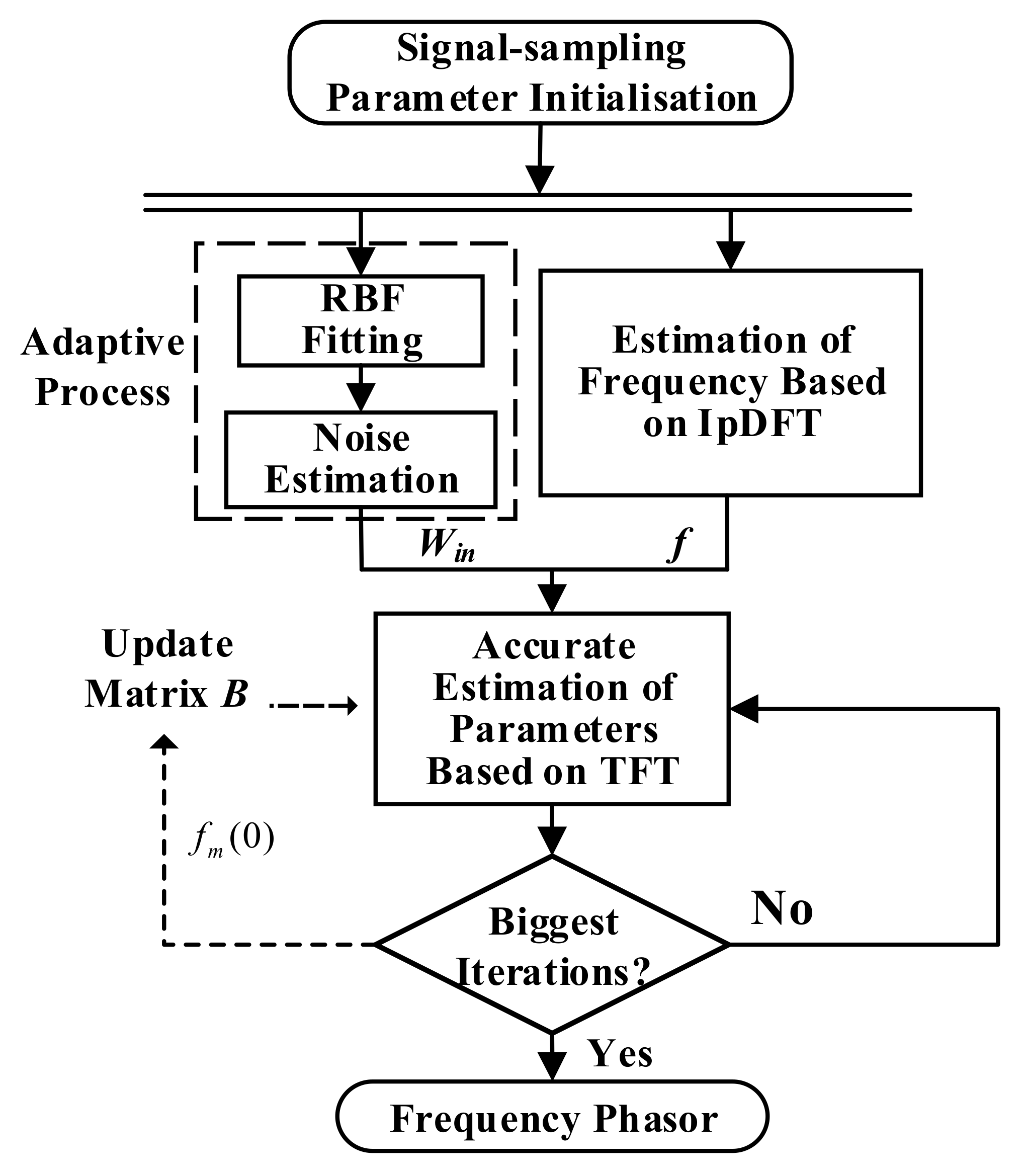
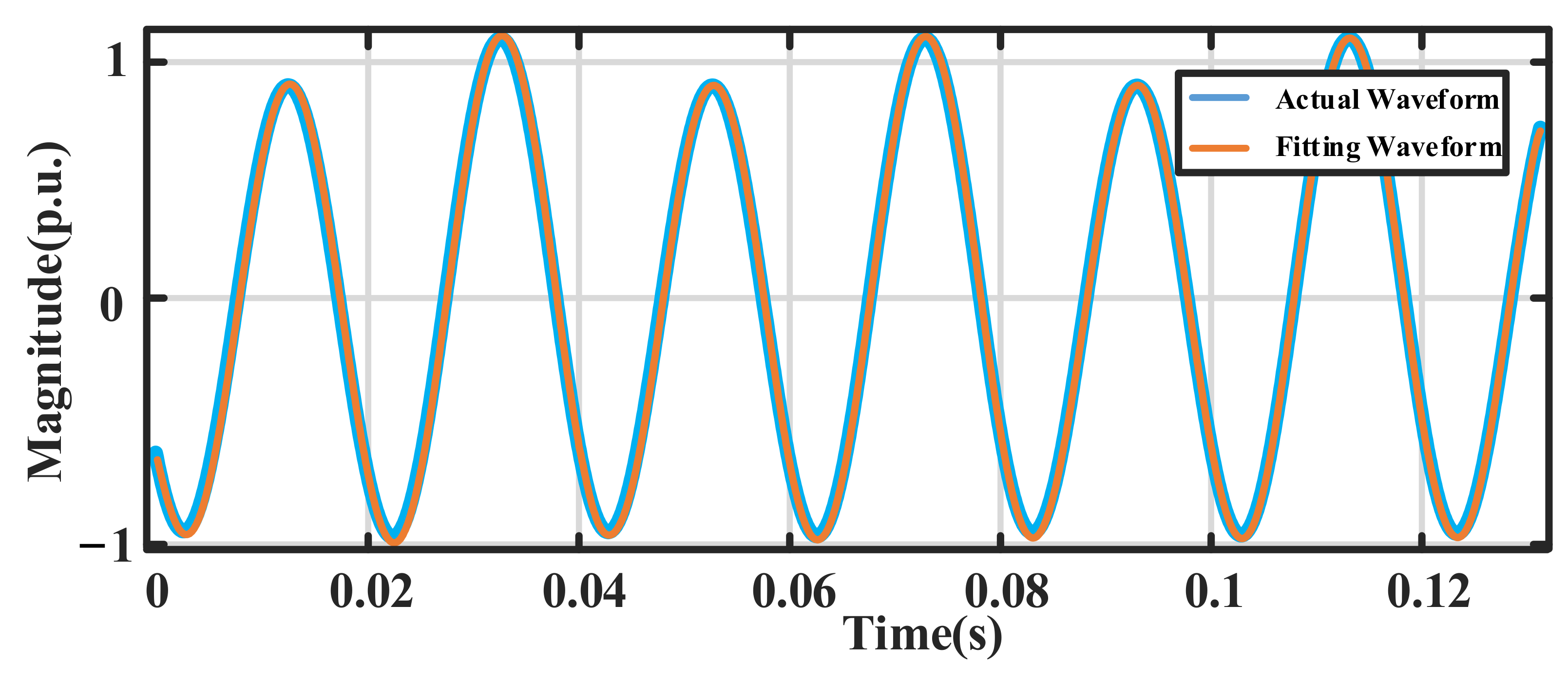
- Fitting signals using RBF neural network algorithms;
- Extracting the noise by comparing the sampled and fitted waveforms, and then estimating the signal-to-noise ratio (SNR);
- Determining the data-window length based on the SNR.
3.2.1. Denoising Using RBF Neural Network
- Network initialization: g training samples were randomly selected as the cluster center ci (i = 1, 2, 3, …, g).
- The input training sample sets are grouped according to the nearest rule: The input samples are assigned to each cluster set according to the Euclidean distance between the input samples and the cluster center.
- Re-adjust cluster centers: Calculate the average value of training samples in each cluster set, i.e., the new cluster center ci. If the new cluster center no longer changes, the resulting ci is the final base function center of the RBF neural network. Otherwise, return to the previous step for iteration.
3.2.2. Noise Intensity Estimation
3.2.3. Determining the Window Length
3.3. Flowchart of the Proposed Method
4. Simulations Verification
4.1. Performance Assessment Standard
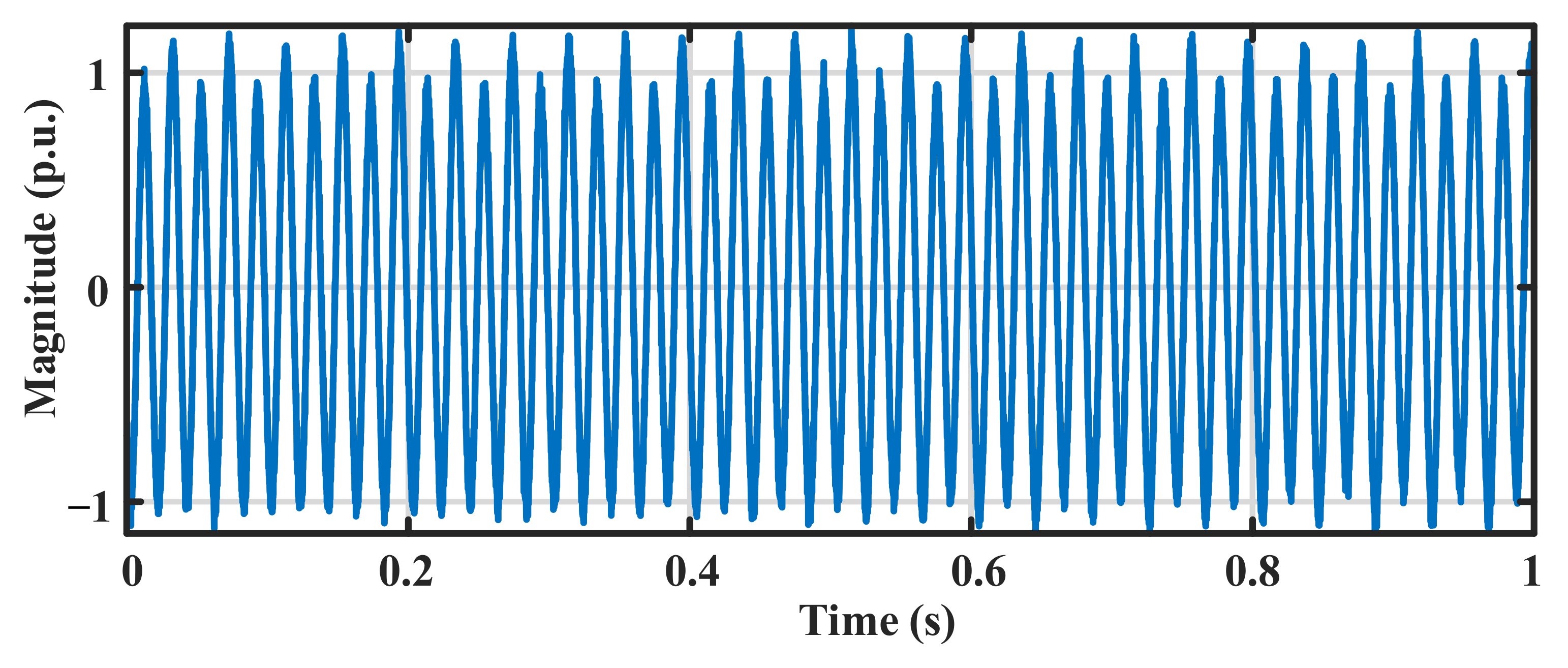
4.2. Simulation Signal Test
- (1)
- Amplitude-modulation dynamics
- (2)
- Frequency-ramp dynamics
- (3)
- Frequency-modulation dynamics
- (4)
- Multi-mode wideband oscillations
4.3. Discussion of Algorithms
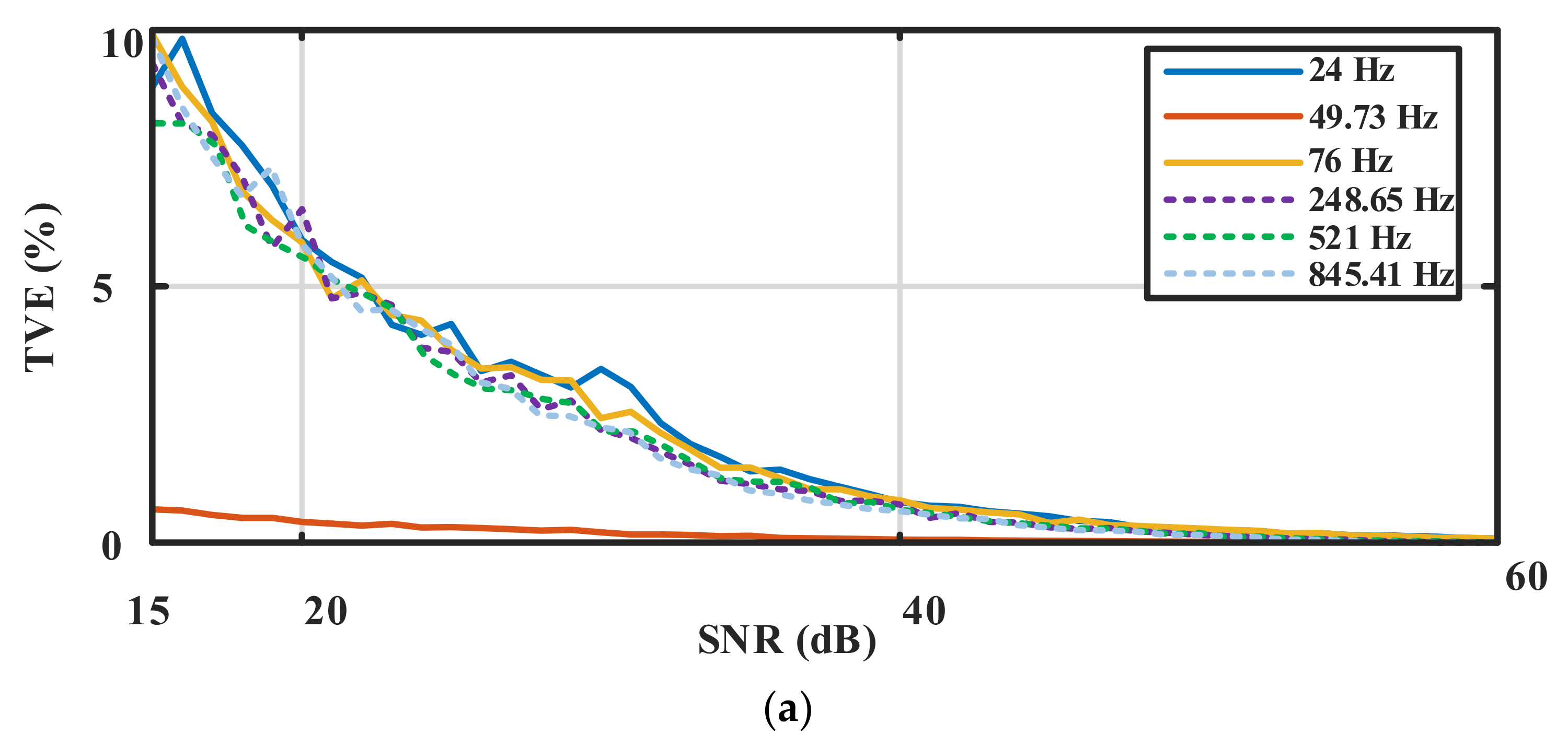
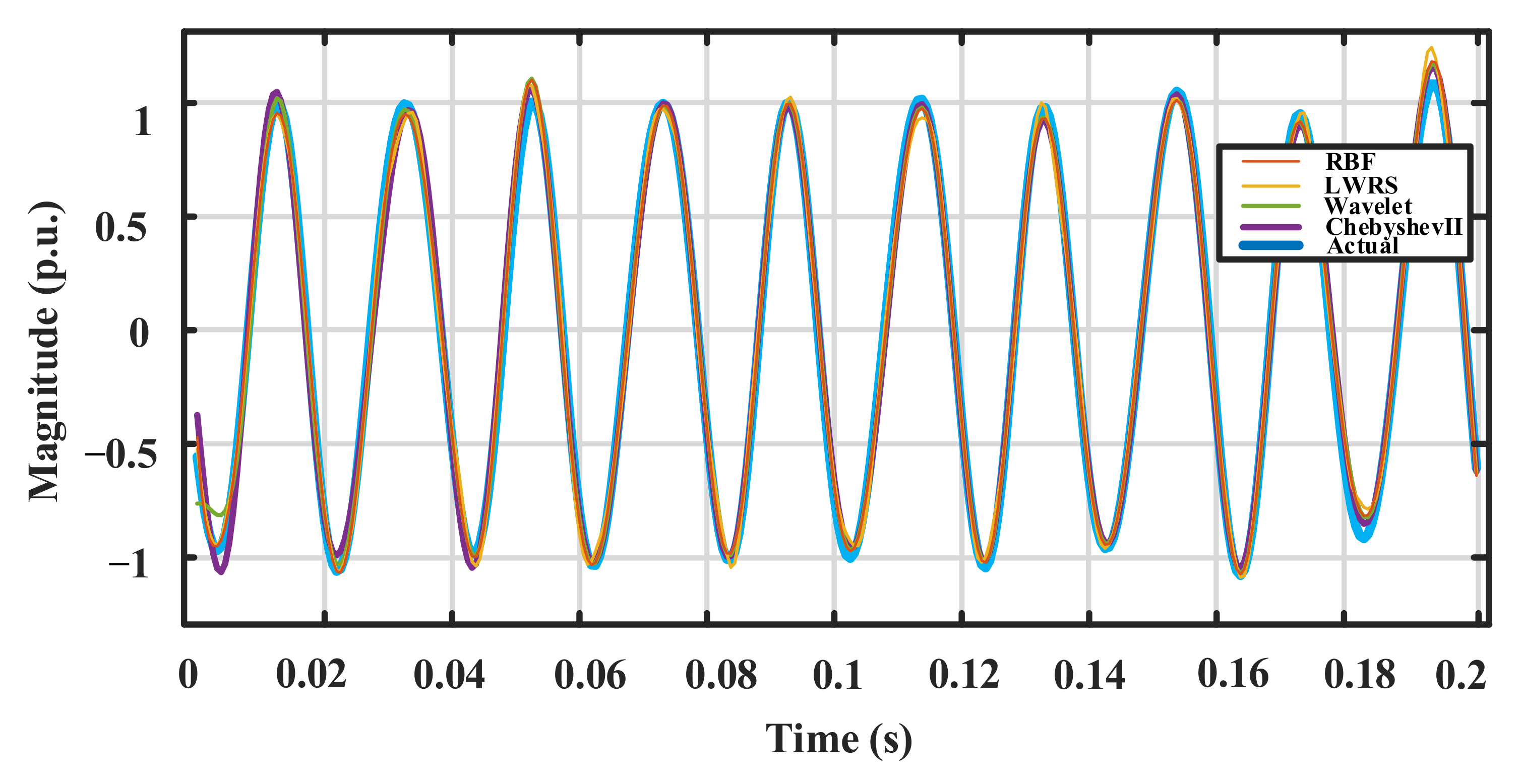
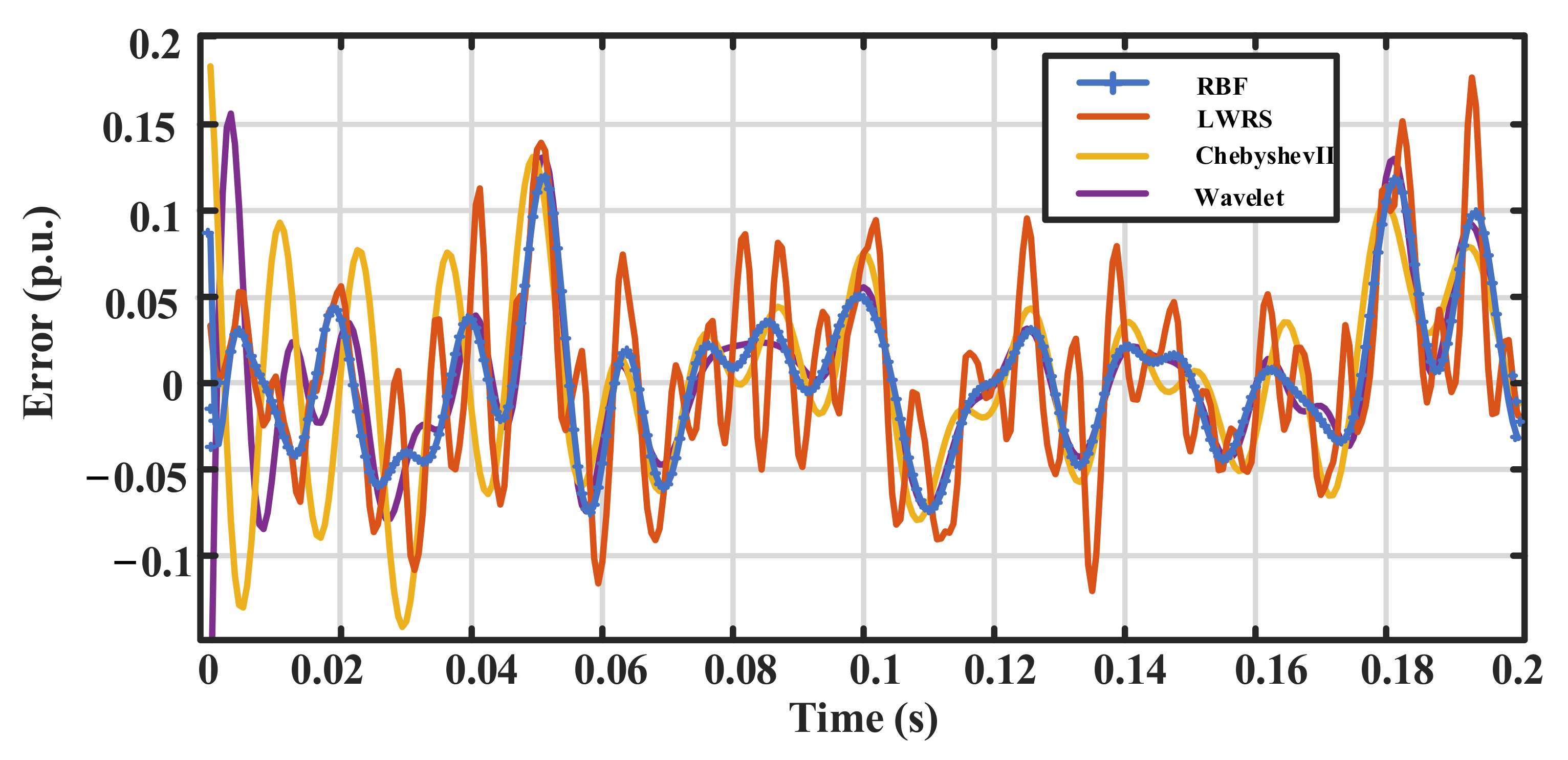
- The simulation results show that the proposed algorithm has superior dynamic performance, as it can cope with dynamic change process and maintains its accuracy under high noise levels. Theoretically, the dynamic performance improves with the Taylor expansion order, but the higher expansion order increases the computation cost.
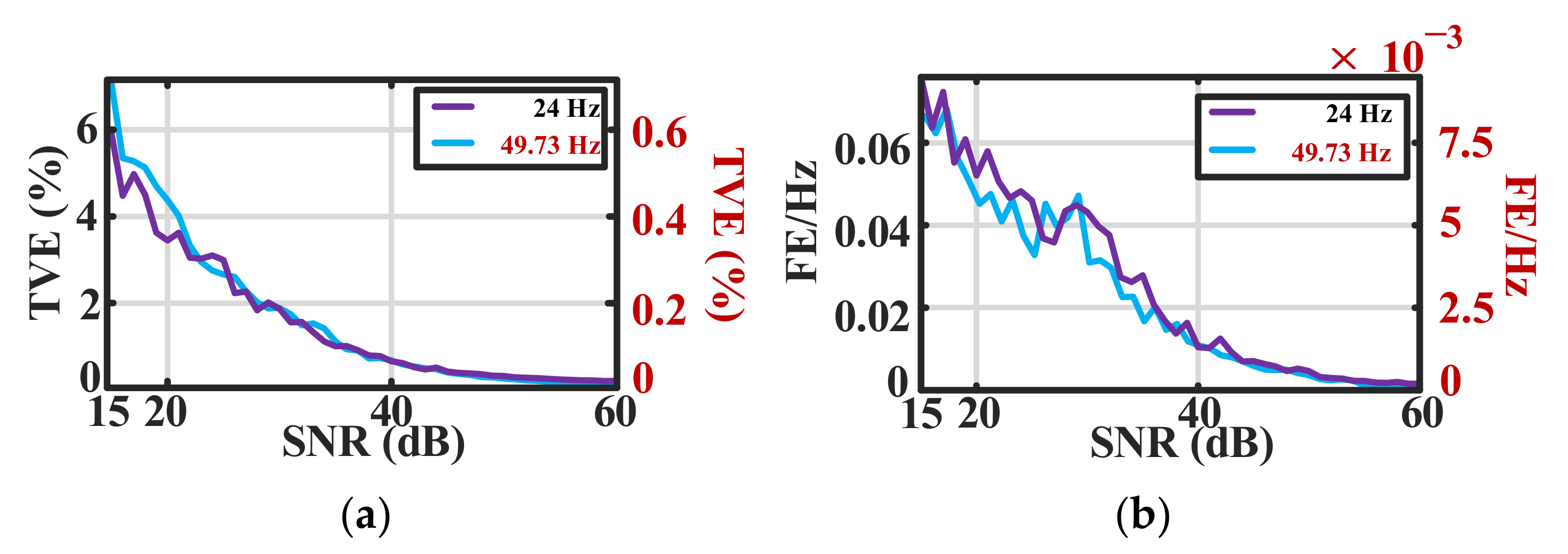
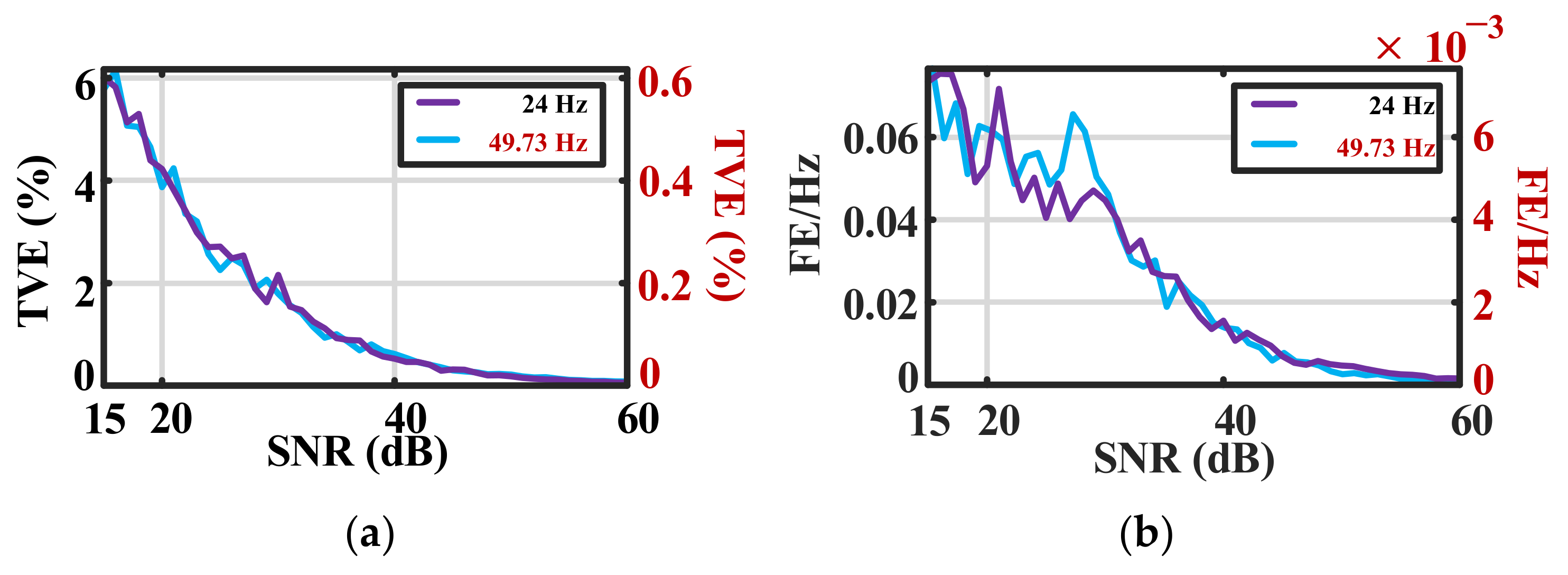
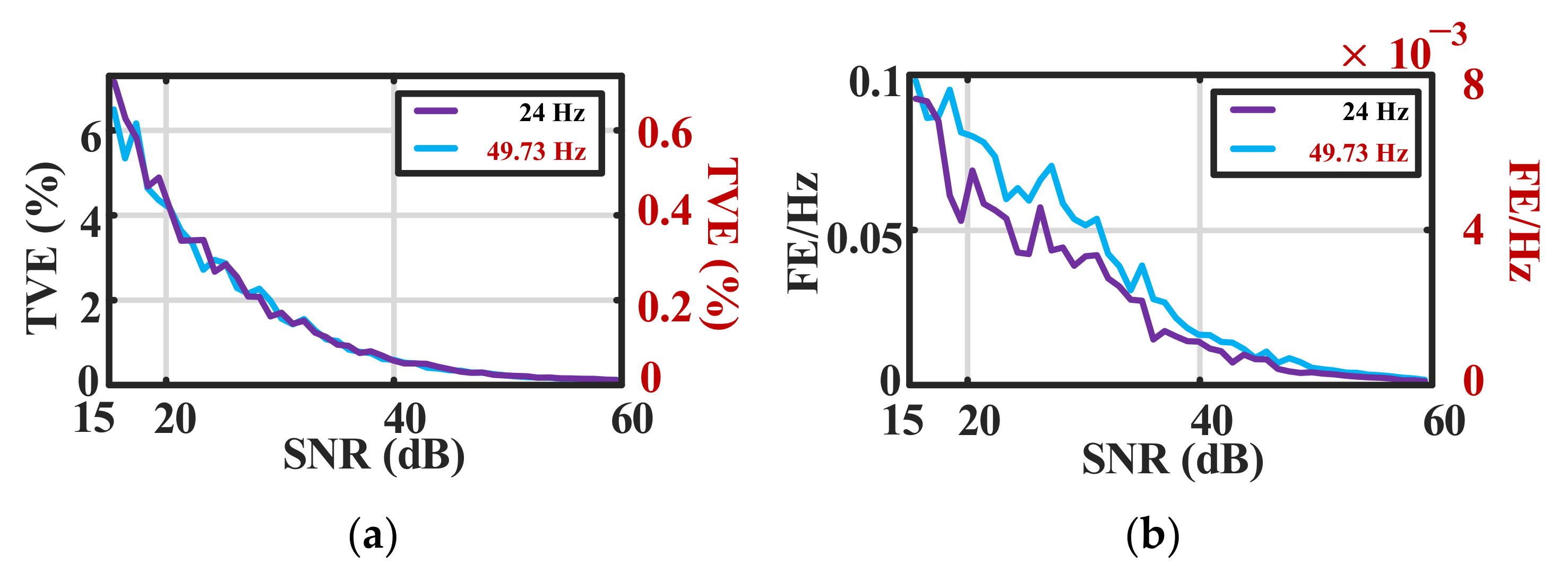
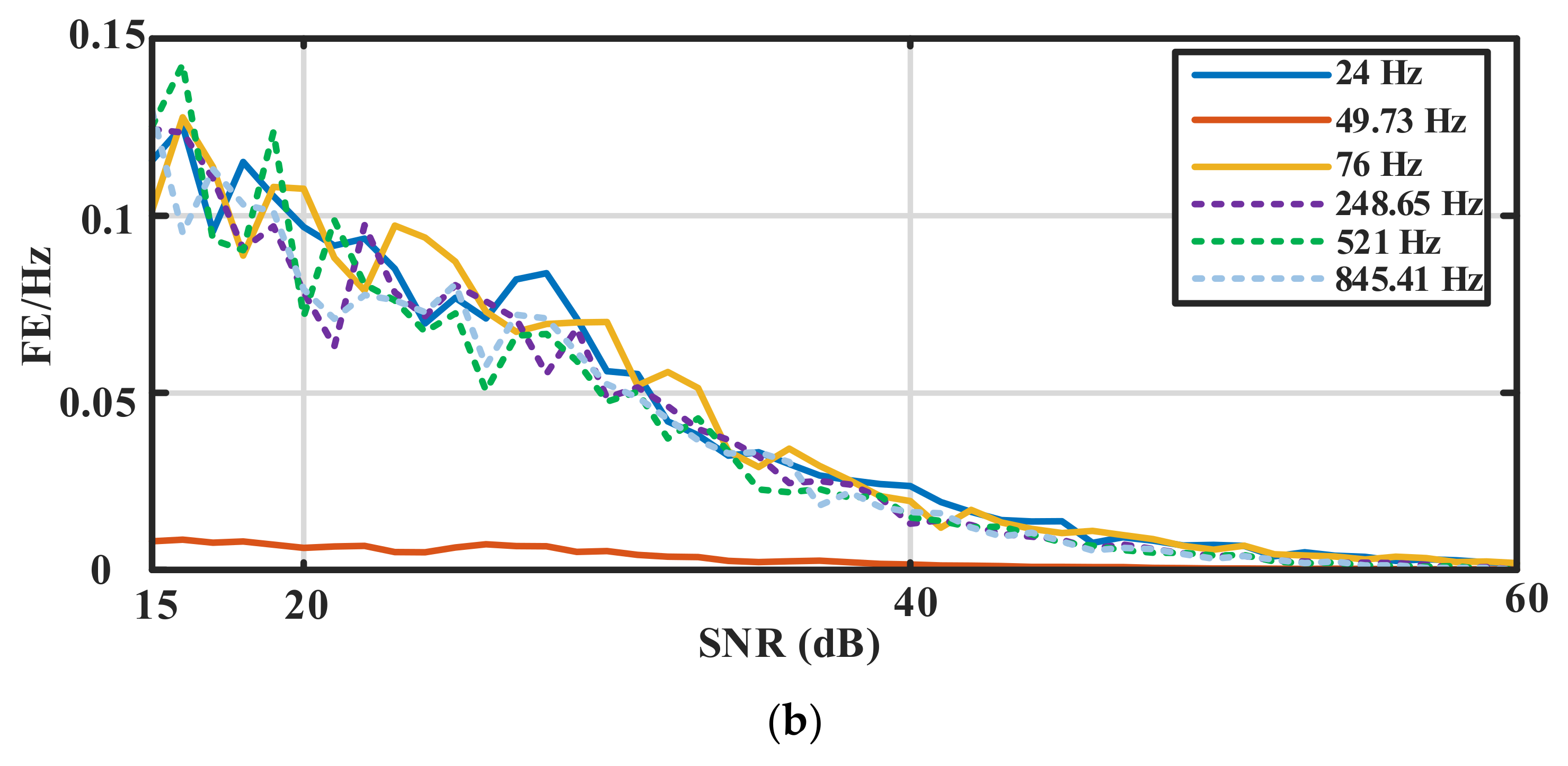
- The phasor and frequency errors of the power frequency component are much smaller than those of the other signal components because the power frequency component has a larger amplitude and is less affected by noise. According to the measurement standards for power frequency phasors given in IEEE Std. C37.118.1-2011, the maximum overall phasor error and maximum frequency error are 1% and 0.01 Hz, respectively. A combination of Figure 5, Figure 6, Figure 7 and Figure 8 reveals that the proposed algorithm fully satisfies this requirement.
- The TFT algorithm is extremely dependent on the initial frequency, and the oscillation signal may be too noisy to be identified by the IpDFT algorithm at the early stage of oscillation, which may collapse the TFT algorithm. Therefore, the sampling signal can be pre-processed using the proposed algorithm.
- The data-window length also has a significant influence on the TFT algorithm. If the dynamic performance needs to be improved, specific choices can be made according to scenario requirements, and accuracy can be sacrificed to further reduce the window length.
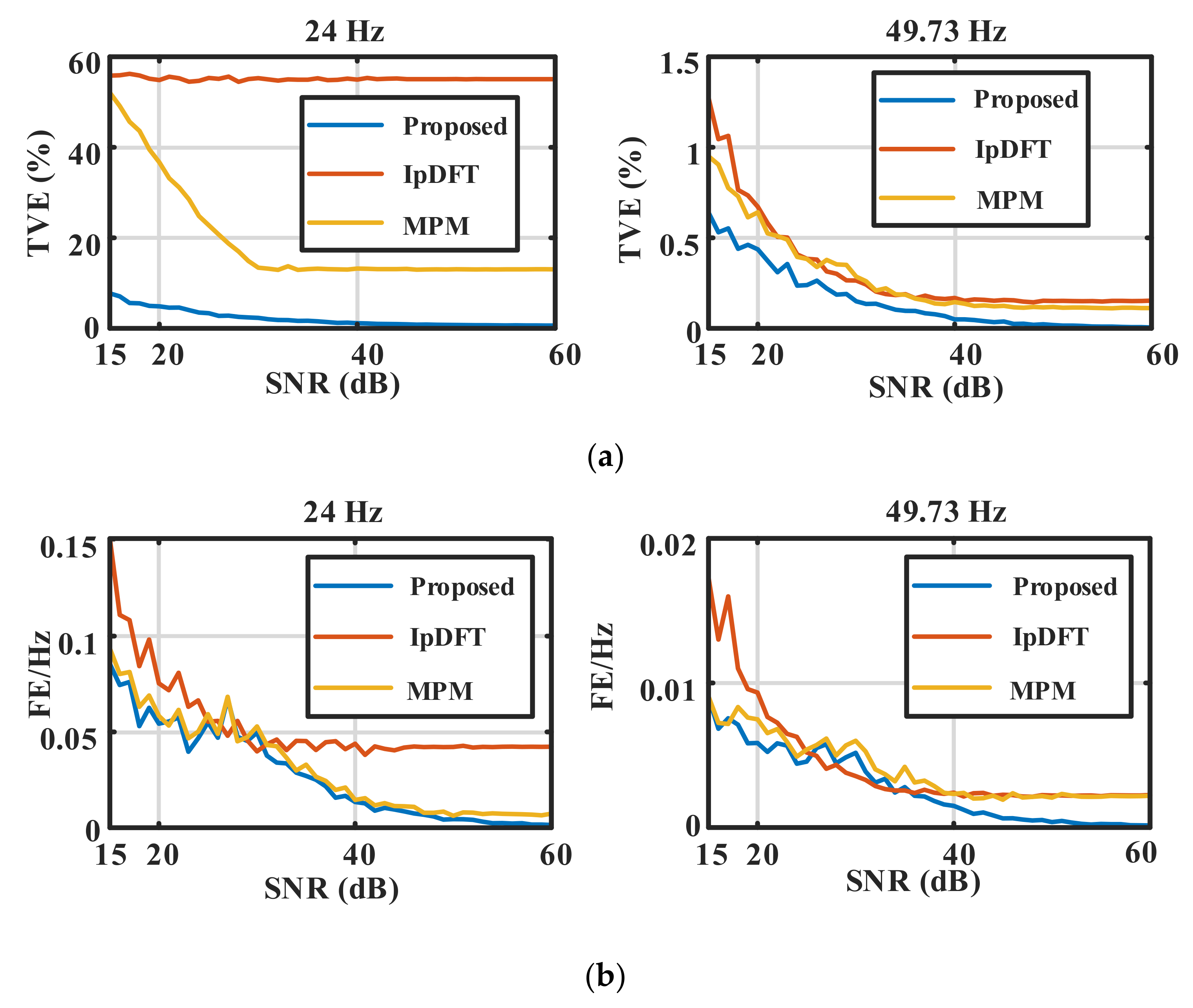
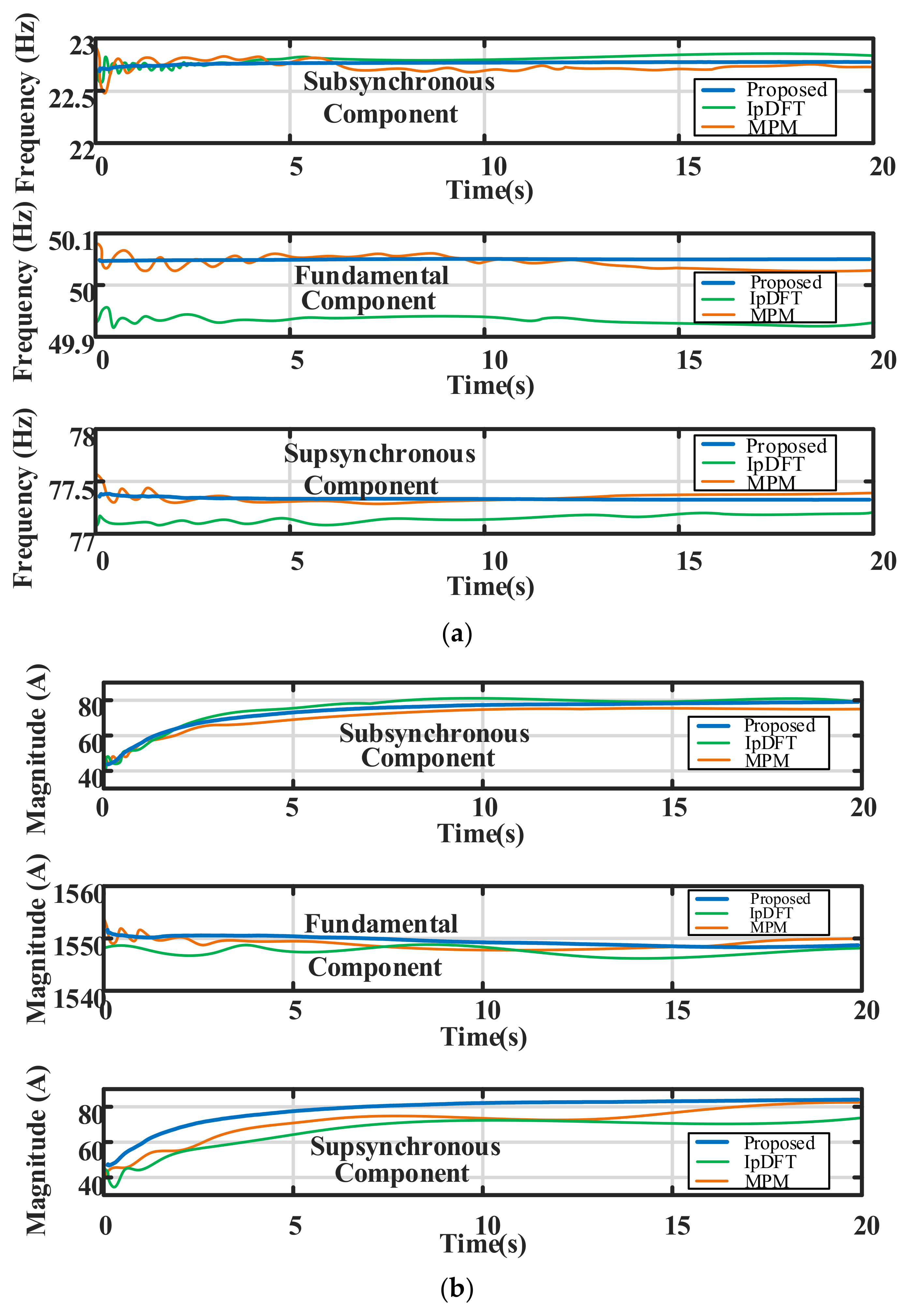
4.4. Comparison of Algorithms
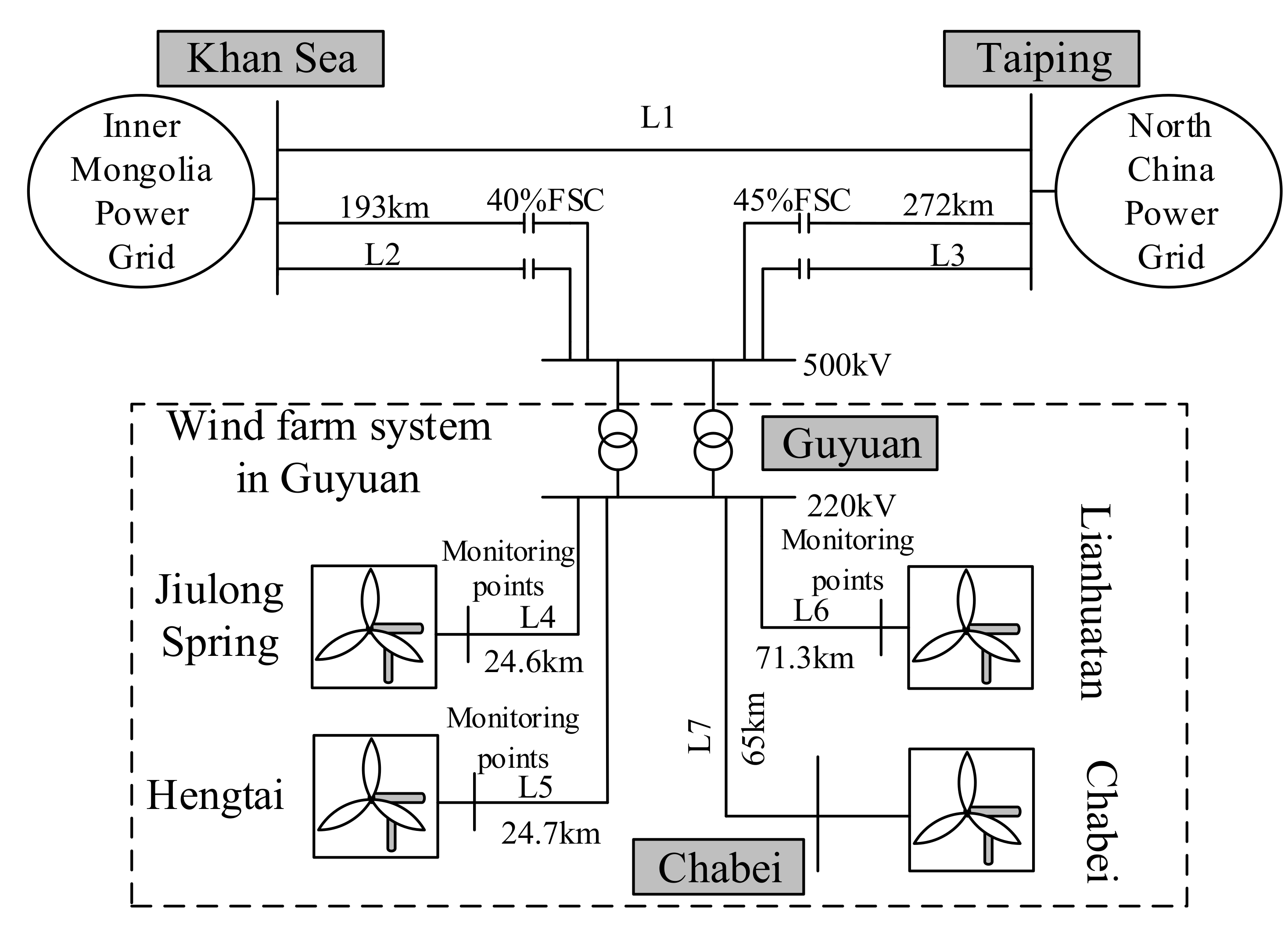
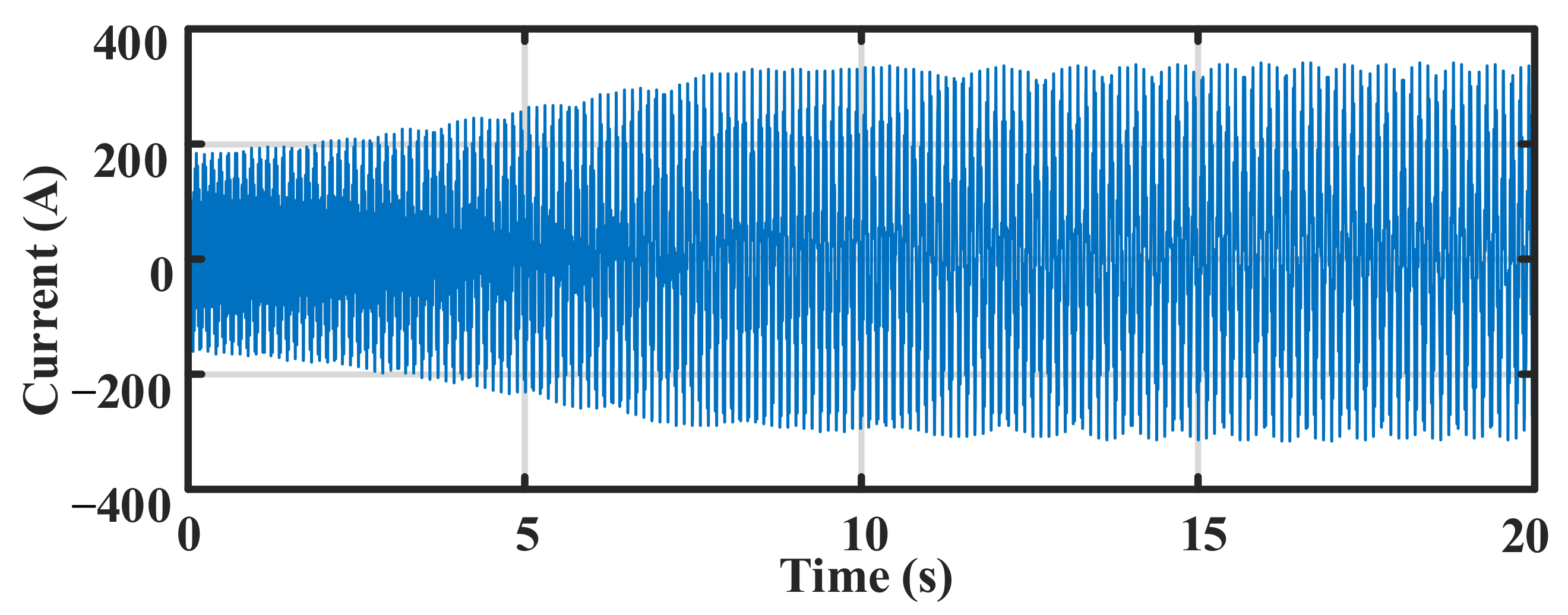
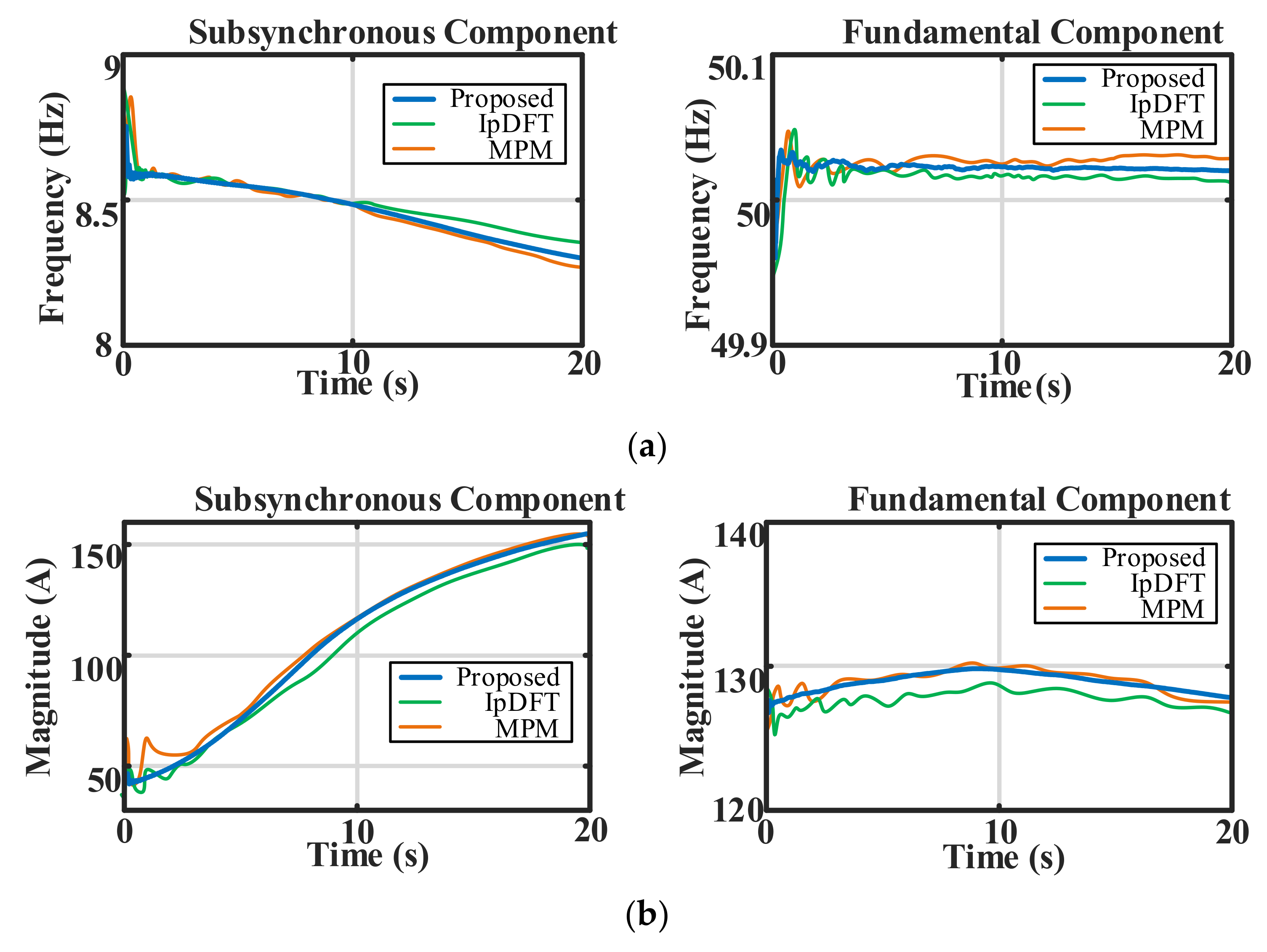
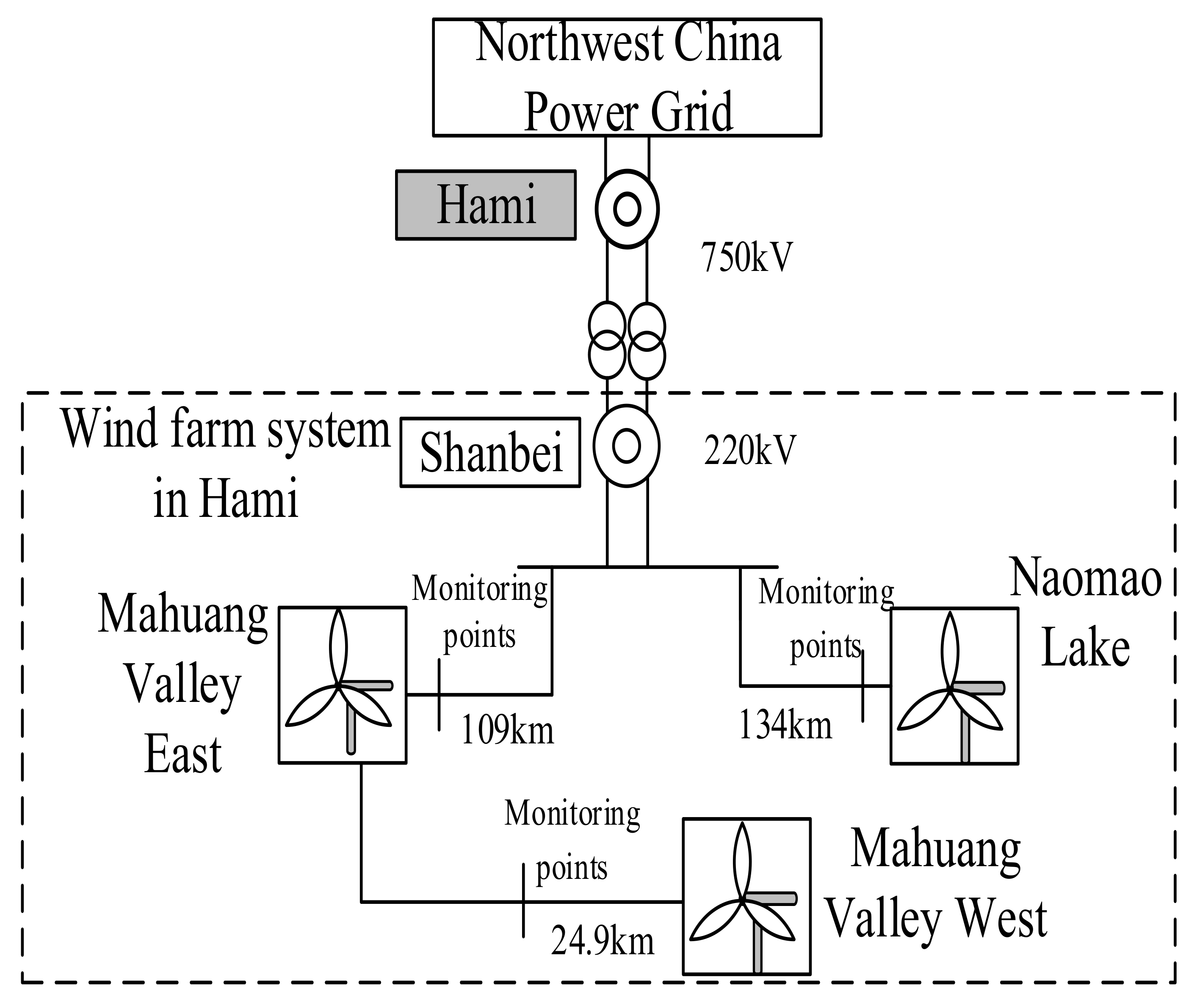
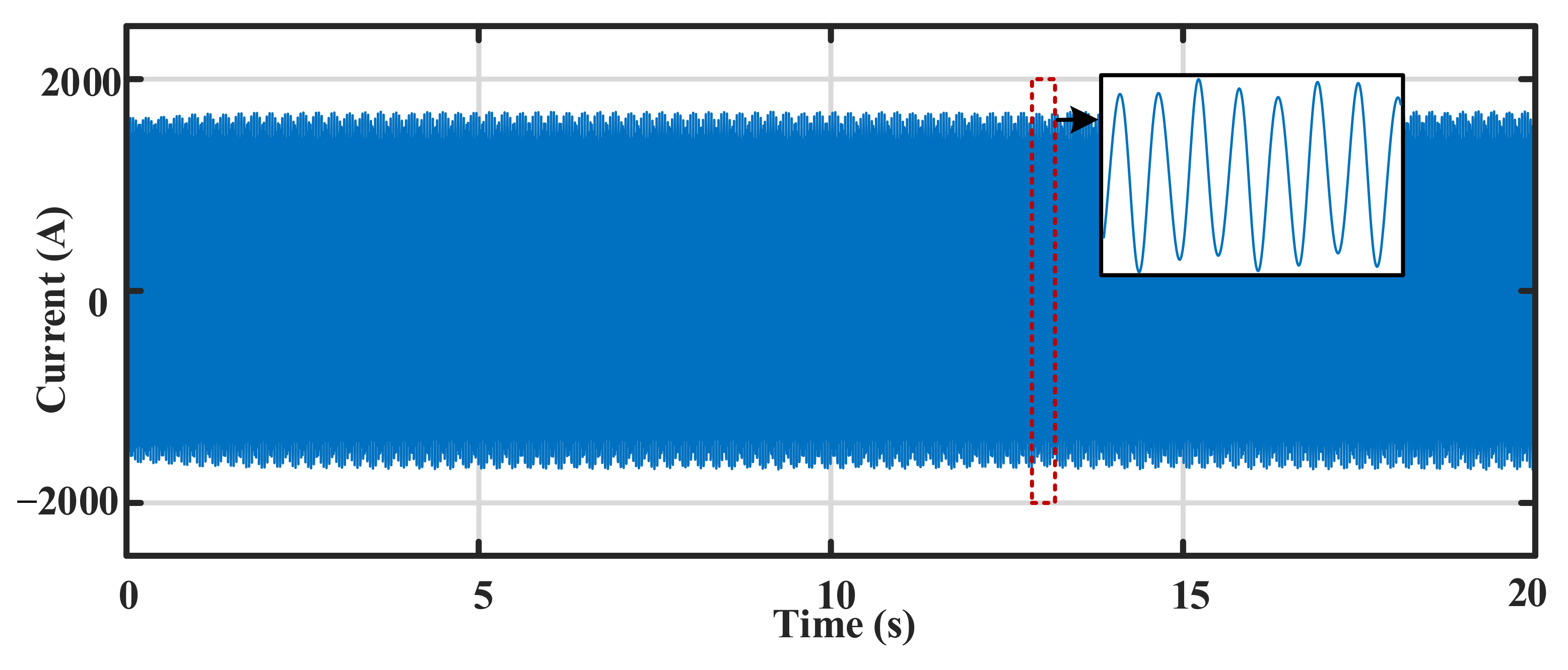
5. Field Data Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Basu, J.B.; Dawn, S.; Saha, P.K.; Chakraborty, M.R.; Ustun, T.S. A Comparative Study on System Profit Maximization of a Renewable Combined Deregulated Power System. Electronics 2022, 11, 2857. [Google Scholar] [CrossRef]
- Alamri, B.; Hossain, M.A.; Asghar, M.J. Electric Power Network Interconnection: A Review on Current Status, Future Prospects and Research Direction. Electronics 2021, 10, 2179. [Google Scholar]
- Hussain, S.M.S.; Nadeem, F.; Aftab, M.A.; Ali, I.; Ustun, T.S. The Emerging Energy Internet: Architecture, Benefits, Challenges, and Future Prospects. Electronics 2019, 8, 1037. [Google Scholar] [CrossRef] [Green Version]
- Xie, X.; Zhan, Y.; Shair, J.; Ka, Z.; Chang, X. Identifying the Source of Subsynchronous Control Interaction via Wide-Area Monitoring of Sub/Super-Synchronous Power Flows. IEEE Trans. Power Deliv. 2020, 35, 2177–2185. [Google Scholar] [CrossRef]
- Zhan, Y.; Xie, X.; Liu, H.; Liu, H.; Li, Y. Frequency-Domain Modal Analysis of the Oscillatory Stability of Power Systems With High-Penetration Renewables. IEEE Trans. Sustain. Energy 2019, 10, 1534–1543. [Google Scholar] [CrossRef]
- Xu, S.; Wang, Y.; Xiao, X.; Wu, J.; Lv, W. Non-Characteristic Harmonic Resonance in LCC-HVDC Terminals: A Practical Case Study. Int. Trans. Electr. Energ. Syst. 2021, 31, e12743. [Google Scholar] [CrossRef]
- Adams, J.; Pappu, V.A.; Dixit, A. ERCOT experience screening for Sub-Synchronous Control Interaction in the vicinity of series capacitor banks. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–5. [Google Scholar]
- Wang, L.; Xie, X.; Jiang, Q.; Liu, H.; Li, Y.; Liu, H. Investigation of SSR in Practical DFIG-Based Wind Farms Connected to a Series-Compensated Power System. IEEE Trans. Power Syst. 2015, 30, 2772–2779. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; He, J.; Xu, T.; Yu, Z.; Wang, C.; Zhang, C. Subsynchronous Interaction Between Direct-Drive PMSG Based Wind Farms and Weak AC Networks. IEEE Trans. Power Syst. 2017, 32, 4708–4720. [Google Scholar] [CrossRef]
- Li, W.; Wang, Q. Stochastic production simulation for generating capacity reliability evaluation in power systems with high renewable penetration. Energy Convers Econ. 2020, 1, 210–220. [Google Scholar] [CrossRef]
- Qi, J.; Tang, F.; Xie, J.; Li, X.; Wei, X.; Liu, Z. Research on Frequency Response Modeling and Frequency Modulation Parameters of the Power System Highly Penetrated by Wind Power. Sustainability 2022, 14, 7798. [Google Scholar] [CrossRef]
- Corsi, S.; Taranto, G.N. A Real-Time Voltage Instability Identification Algorithm Based on Local Phasor Measurements. IEEE Trans. Power Syst. 2008, 23, 1271–1279. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, X.; Xie, X.; Yang, X.; Xiao, X. Identifying Sources of Subsynchronous Resonance Using Wide-Area Phasor Measurements. IEEE Trans. Power Deliv. 2021, 36, 3242–3254. [Google Scholar] [CrossRef]
- Li, H.; Abdeen, M.; Chai, Z.; Kamel, S.; Xie, X.; Hu, Y.; Wang, K. An Improved Fast Detection Method on Subsynchronous Resonance in a Wind Power System With a Series Compensated Transmission Line. IEEE Access. 2019, 7, 61512–61522. [Google Scholar] [CrossRef]
- Chen, W.; Wang, D.; Xie, X.; Ma, J.; Bi, T. Identification of Modeling Boundaries for SSR Studies in Series Compensated Power Networks. IEEE Trans. Power Syst. 2017, 32, 4851–4860. [Google Scholar] [CrossRef]
- Appasani, B.; Mohanta, D.K. A review on synchrophasor communication system: Communication technologies, standards and applications. Prot. Control Mod. Power Syst. 2018, 3, 37. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Zhang, Y.; Zhang, P.; Jin, X.; Fu, C. Development of a WAMS based test platform for power system real time transient stability detection and control. Prot. Control Mod. Power Syst. 2016, 1, 6. [Google Scholar] [CrossRef] [Green Version]
- Ling, W.; Jie, W.; Li, W.; Chao, S.; Kaipei, L. The 7-terms Harris window and interpolated FFT harmonic analysis method for electrified railway. In Proceedings of the 2014 International Conference on Information Science, Electronics and Electrical Engineering, Sapporo, Japan, 26–28 April 2014; Volume 1, pp. 18–23. [Google Scholar]
- Derviškadić, A.; Romano, P.; Paolone, M. Iterative-interpolated DFT for synchrophasor estimation: A single algorithm for P- and M-class compliant PMUs. IEEE Trans Instrum Meas. 2018, 67, 547–558. [Google Scholar] [CrossRef] [Green Version]
- Shiri, F.; Mohammadi-ivatloo, B. Identification of inter-area oscillations using wavelet transform and phasor measurement unit data. Int. Trans. Electr. Energ. Syst. 2015, 25, 2831–2846. [Google Scholar] [CrossRef]
- Rana, M.J.; Alam, M.S.; Islam, M.S. Continuous wavelet transform based analysis of low frequency oscillation in power system. In Proceedings of the 2015 International Conference on Advances in Electrical Engineering (ICAEE), Dhaka, Bangladesh, 17–19 December 2015; pp. 320–323. [Google Scholar]
- Laila, D.S.; Messina, A.R.; Pal, B.C. A Refined Hilbert–Huang Transform with Applications to Interarea Oscillation Monitoring. IEEE Trans. Power Syst. 2009, 24, 610–620. [Google Scholar] [CrossRef] [Green Version]
- Andrade, M.A.; Messina, A.R.; Rivera, C.A.; Olguin, D. Identification of instantaneous attributes of torsional shaft signals using the Hilbert transform. IEEE Trans. Power Syst. 2004, 19, 1422–1429. [Google Scholar] [CrossRef]
- Ray, P.K.; Subudhi, B. Ensemble-Kalman-filter-based power system harmonic estimation. IEEE Trans Instrum Meas. 2012, 61, 3216–3224. [Google Scholar] [CrossRef]
- Yu, K.K.C.; Watson, N.R.; Arrillaga, J. An adaptive Kalman filter for dynamic harmonic state estimation and harmonic injection tracking. IEEE Trans. Power Deliv. 2005, 20, 1577–1584. [Google Scholar] [CrossRef]
- Jun, W. Feature extraction of localized scattering centers using the modified TLS-Prony algorithm and its applications. J. Syst. Eng. Electron. 2002, 13, 31–39. [Google Scholar]
- CGrund, E.; Paserba, J.J.; Hauer, J.F.; Nilsson, S.L. Comparison of Prony and eigenanalysis for power system control design. IEEE Trans. Power Syst. 1993, 8, 964–971. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, H.; Xie, X.; Yang, X.; Chen, G. Real-Time Subsynchronous Control Interaction Monitoring using Improved Intrinsic Time-Scale Decomposition. J. Mod. Power Syst. Clean Energy 2022, 1–11. [Google Scholar] [CrossRef]
- de la O Serna, J.A. Dynamic phasor estimates for power system oscillations. IEEE Trans Instrum. Meas. 2007, 56, 1648–1657. [Google Scholar] [CrossRef]
- Chen, L.; Zhao, W.; Wang, F.; Wang, Q.; Huang, S. An interharmonic phasor and frequency estimator for subsynchronous oscillation identification and monitoring. IEEE Trans Instrum. Meas. 2019, 68, 1714–1723. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Jin, Z.; Terzija, V. An adaptive decomposition scheme for wideband signals of power systems based on the modified robust regression smoothing and Chebyshev-II IIR filter bank. IEEE Trans. Power Deliv. 2019, 34, 220–230. [Google Scholar] [CrossRef]
- Xu, S.; Wang, Y.; Xiao, X.; Xu, W.; Wang, Y. Adaptive Damping an Improved Resonance Mitigation Scheme for Shunt Capacitors. IEEE Trans. Power Deliv. 2022, 37, 755–764. [Google Scholar] [CrossRef]
- Hou, M.; Han, X. Constructive Approximation to Multivariate Function by Decay RBF Neural Network. IEEE Trans Neural Netw. 2010, 21, 1517–1523. [Google Scholar]
- IEEE. IEEE Std C37.118.1-2011; IEEE Standard for Synchrophasor Measurements for Power Systems. (Revision of IEEE Std C37.118-2005). IEE: Geneva Switzerland, 2011; pp. 1–61. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | p.u. | Rad |
|---|---|---|
| 1 | 0.1e0.1t | π/3 + 100 cos (0.2πt) |
| 2 | 1 + 5/12 cos (0.24πt) | 0.75π + πt2 |
| 3 | 0.1e0.1t | −100 cos (0.2πt) |
| 4 | 0.1 | 7π/12 + 5πt2 |
| 5 | 0.1e0.15t | 7π/36 + 10πt2 |
| 6 | 0.1 | 5π/3 + 17πt2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Q.; Ma, Z.; Li, P.; Jiang, X.; Wang, C. A Refined Taylor-Fourier Transform with Applications to Wideband Oscillation Monitoring. Electronics 2022, 11, 3734. https://doi.org/10.3390/electronics11223734
Xu Q, Ma Z, Li P, Jiang X, Wang C. A Refined Taylor-Fourier Transform with Applications to Wideband Oscillation Monitoring. Electronics. 2022; 11(22):3734. https://doi.org/10.3390/electronics11223734
Chicago/Turabian StyleXu, Qunwei, Zhiquan Ma, Pei Li, Xiaolong Jiang, and Chaoqun Wang. 2022. "A Refined Taylor-Fourier Transform with Applications to Wideband Oscillation Monitoring" Electronics 11, no. 22: 3734. https://doi.org/10.3390/electronics11223734