1. Introduction
Underwater robots play an increasingly important role in tasks such as marine resource exploration and deep-sea operations [
1,
2]. As the power component of the underwater robot, the thruster is the key to controlling the motion of the machine. When the thruster fails, the thrust will be derated, or the power may even be lost. In extreme cases, this will also risk the loss of the underwater robot [
3]. Fault diagnosis can detect the problem with the thruster in good time and enable the taking of rescue measures to prevent the further deterioration of the fault, thereby avoiding greater losses. Therefore, the fault diagnosis of thrusters is of great significance in the field of underwater robots.
In recent years, both domestic and foreign scholars have conducted extensive and in-depth research on thruster fault diagnosis methods. Chen et al. summarized the current research status of thruster fault diagnosis and divided the thruster fault diagnosis methods into three categories: the qualitative analysis diagnosis method, the signal processing diagnosis method, and the analytical model diagnosis method [
4].
The diagnostic method of qualitative analysis is based on the operating mechanism of the system and infers the fault, according to the causal relationship of the fault. Common fault diagnosis methods include fault trees [
5], directed graphs [
6], and so on. Li et al. proposed a method combining the fault tree and the Monte Carlo method, established an underwater unmanned vehicle system model, obtained the minimum cut set of the fault tree, and combined the results with the Monte Carlo method for reliability verification [
7]. Zhang et al. proposed a thruster fault diagnosis method, based on gray qualitative constrained filtering, to solve the problem of forgery behavior in a qualitative simulation of the model, and verified the effectiveness of the method through comparative experiments [
8]. Xiang et al. established a fault tree model according to the potential fault source of the underwater vehicle, identified the system risk using the fuzzy neural network method, completed an online fault diagnosis, and verified the effectiveness of the method in a hardware and simulation environment [
9].
The signal processing diagnosis method extracts fault features such as amplitude and phase, according to the input and output of the system, and realizes fault diagnosis based on these features. SVM, random forests [
10], and other ensemble learning methods [
11] in machine learning are widely used in thruster fault diagnosis. Chu et al. proposed a fault diagnosis method for underwater thrusters that was based on random forest regression (RFR) and the support vector machine (SVM) [
12]. The RFR-based number theory method is used to deal with the scale imbalance between normal samples and fault samples, and the SVM is used to train the thruster fault diagnosis model. Finally, the effectiveness of the method is verified in the pool environment. Cheng et al. proposed a thruster fault diagnosis model based on principal component analysis [
13]. The diagnostic model obtained the current predicted value of the thruster current, according to the historical current samples of the normal state of the thruster, calculated the mean square error of the fault detection statistic prediction, and diagnosed faults according to the change in error. The effectiveness of the method is verified by simulation, using actual sea trial data. F. Costa proposed a fault detection method for submersibles, based on wavelet coefficient energy, which considers the boundary effect of sliding windows and realizes low-latency real-time fault diagnosis [
14]. Zhang et al. proposed a thruster fault feature extraction and fusion algorithm, which extracts fuses and normalizes the speed signal, to realize thruster fault diagnosis [
15]. Ning proposed a directed graph and support vector machine fault diagnosis method, using the difference method to extract features from the sample data, using the support vector machine to classify the extracted feature vectors [
16]. The residual value processing of the ship’s physical redundancy relationship is used to verify the completeness and accuracy of the diagnostic results. Xu proposed a thruster fault diagnosis method, based on wavelet packet transformation and genetic algorithm optimization of the backpropagation neural network (BPNN) [
17]. This method selects the fault characteristic signal from the current signal, decomposed by the wavelet packet transform and the calculated energy spectrum, and uses a BPNN optimized by a genetic algorithm to realize the thruster fault classification. The verification and experimental results show that the method’s accuracy is better than the traditional BPNN recognition model.
The analytical model diagnosis method is intended to establish a mathematical model according to the operating mechanism of the system; it obtains the residual sequence of the expected parameters and measured parameters and uses a constructed fault diagnosis model to diagnose faults [
18]. Chu et al. proposed a fault diagnosis method for underwater thrusters that is based on terminal sliding mode observers [
19]. The reconstructed system makes all state estimation errors converge to zero within a limited time, which improves the fault diagnosis speed. The effectiveness of the method is verified by simulation. Zhao et al. proposed a fault diagnosis method for navigation actuators based on a particle filter, which realizes fault diagnosis through motion state estimation [
20]. Liu et al. proposed a fault diagnosis method for underwater vehicles based on a fault observer, then established a fault function and detected the fault in the underwater vehicle earlier, through fault isolation and identification [
21].
Among the above thruster fault diagnosis methods, qualitative analysis relies more heavily on the reasoning and analysis of prior knowledge; the fault diagnosis process lacks quantitative analysis, so it is difficult to diagnose minor faults in the thruster. In addition, the process of diagnosis, reasoning, and analysis is more complicated, and it is difficult to realize the online fault diagnosis of thrusters. A diagnosis method based on signal processing finds it difficult to distinguish between the weak fault signal of the thruster and the external interference signal and lacks the quantitative analysis element needed to identify the fault degree. It is difficult to establish an accurate mathematical model, based on the analytical model diagnosis method, which affects the accuracy of fault diagnosis, but the calculation process is relatively simple and the real-time performance of fault diagnosis is good.
To improve the real-time performance and accuracy of thruster fault diagnosis, this paper adopts a method based on a combination of an analytical model and signal processing for fault diagnosis. The method first establishes the underwater thruster model and the thruster load torque model. The thruster load torque model includes the fault characteristic parameters, k and B, which reflect the thruster fault. Second, an SMO is used to reconstruct the thruster load torque, according to the underwater thruster model and the input control signals. Again, the reconstructed load torque is identified as a fault signature using the LSM. Finally, we use the SVM to train a fault classification model and employ the classification model to diagnose faults online. The main innovative contributions of this paper include:
The load torque model of the underwater thruster is established, and the characteristic signals used to describe the different fault patterns of the thruster are constructed by analyzing the various characteristics of the load torque under different fault patterns.
According to the underwater thruster torque model and the input and output signals, a real-time reconstruction method of thruster load torque, based on an SMO, is proposed.
According to the load torque model and the input data in the form of a rolling window, a method for identifying the fault characteristic parameters of the thruster, based on the LSM, is proposed.
According to the identified fault characteristic parameters, a thruster fault pattern classification method, based on the SVM, is proposed.
The main structure of this paper is as follows:
Section 2 introduces the composition and dynamic model of the thruster, analyzes the load torque characteristics of the thruster under typical faults, and establishes the thruster torque model.
Section 3 introduces the thruster fault diagnosis process and the adopted fault diagnosis method.
Section 4 introduces the thruster failure simulation experiment and gives the simulation results.
Section 5 presents the conclusions drawn in this paper.
2. Problem Description
2.1. Underwater Thruster
A magnetic coupling transmission propeller thruster is mainly considered in this paper. This type of thruster is also the one most widely used in underwater robots.
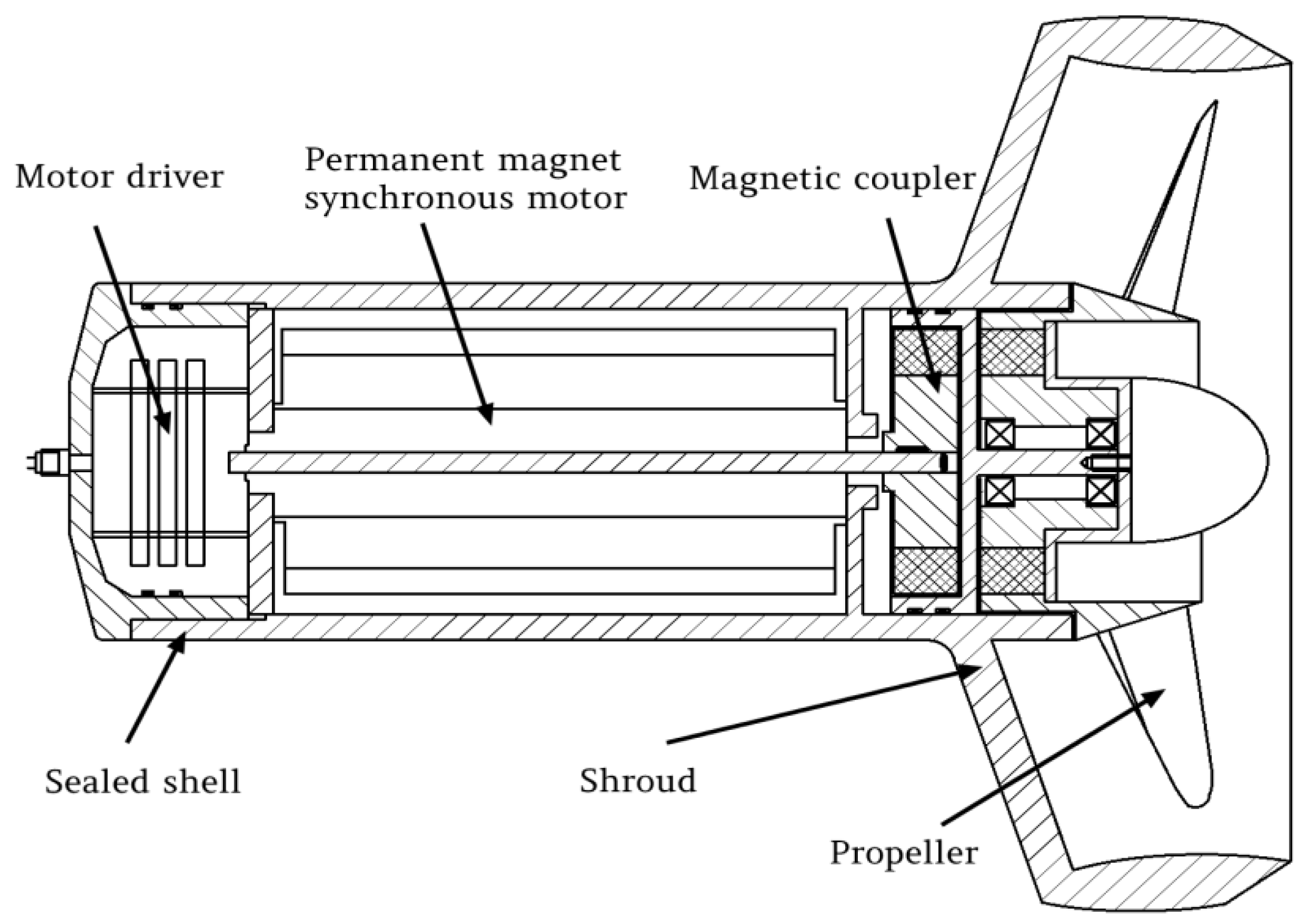
Figure 1 is a schematic diagram of a magnetically coupled underwater thruster [
22]. The thruster is composed of a permanent magnet synchronous motor (PMSM), a motor driver, a magnetic coupler, a propeller, a sealed shell, a shroud, and other components. The PMSM is the power component of the thruster and is connected to the driving shaft of the magnetic coupler, to provide power for the magnetic coupler. The thruster propeller is rigidly connected to the driven shaft of the magnetic coupler. The driving shaft and the driven shaft of the magnetic coupler are separated by a magnetic isolation sleeve, which has good sealing performance, and the two transmit power through the interaction of the magnetic field.
2.2. Thruster Dynamics Model
The mathematical model of the thruster dynamic system in the natural coordinate system has the characteristics of time-varying, nonlinear, and strong coupling. To facilitate the design of the controller, the mathematical model needs to be decoupled and simplified. Mathematical methods, such as the Clark transformation and the Park transformation can change the mathematical model of the thruster from the natural coordinate system to the d-q synchronous rotation coordinate system [
23]. The mathematical model of the thruster system is completely decoupled through mathematical transformation, and the voltage equation, flux linkage equation, electromagnetic torque equation, and mechanical motion equation of the thruster in the synchronous rotating coordinate system are thus obtained.
The thruster voltage equation shows the balanced relationship of the voltage in the thruster armature; according to this equation, the current signal under the specified input voltage signal of the thruster system can be obtained [
23,
24,
25]. The equation is expressed as:
where
ud,
uq,
id,
iq,
ψd, and
ψq are the stator voltage, current, and flux linkage of the d-axis and q-axis, respectively,
ωe is the electrical angular velocity, and
R is the stator resistance.
The thruster flux linkage equation reflects the relationship between the armature current and the flux linkage; the greater the current, the greater the flux linkage [
23,
25]. The equation is expressed as:
where
Ld and
Lq are the inductances of the d-axis and q-axis, respectively, and
ψf is the permanent magnet rotor flux linkage.
Substituting (2) into (1), the thruster voltage equation can be obtained as:
The electromagnetic torque equation of the thruster reflects the relationship between the electromagnetic torque of the thruster and the armature current. The greater the armature current, the greater the electromagnetic torque [
23,
25]. The equation is expressed as:
where
Te is the electromagnetic torque generated by the thruster and
pn is the pole pair number of the PMSM.
The mechanical equation of motion expresses the relationship between the rotational speed and the torque of the propeller [
23,
25]. The equation is expressed as:
where
J,
ωm,
TL, and
Tf are the moment of inertia, mechanical angular velocity, load torque, and static torque of the thruster. respectively, and
F is the motor damping coefficient.
2.3. Analysis of Fault Characteristics
Typical fault patterns of a thruster include propeller entanglement, jamming, its breaking and falling off, etc. When the propeller is caught up in debris, such as aquatic plants and fishing nets, a propeller entanglement fault will occur. Compared with the thruster in the normal state, this fault will increase the load torque of the thruster. When the propeller is wrapped up in too much foreign matter, the propeller will jam; the load torque at this time is greatly increased, compared with the original fault of propeller entanglement. When the propeller breaks, the damaged propeller blade reduces the interaction force between the propeller and the water. Compared with the normal state, the load torque of the thruster is smaller at this time. After the propeller blades fall off, the thruster does almost no external work, and the load torque at this time is close to zero.
According to the analysis, the above typical faults will have a direct impact on the load torque of the thruster. Therefore, the fault type of the thruster can be diagnosed according to the change in load torque. However, the change in load torque can only qualitatively analyze the possible types of faults. To accurately identify the types of faults, a mathematical model of thruster load torque needs to be established. The thruster load torque mainly includes two parts: one is the propeller torque, where the rotating propeller overcomes the water resistance to generate thrust. The second is the viscous damping torque that is generated by the water in contact with the rotating propeller output shaft and the surface of the propeller, the value of which is proportional to the rotational speed.
The propeller torque,
Mk, can be expressed as [
26,
27]:
where
km is the dimensionless coefficient of the propeller torque,
ρ is the density of the water body,
Nn is the rotational speed of the propeller, and
Dp is the diameter of the propeller.
Other parameters, except the propeller speed, are constant under the given underwater robot and water environment conditions [
26], so the above formula can be simplified as:
where
and represents the propeller coefficient, and its value is related to the shape of the propeller blade. The fault of the propeller breaking and falling off can affect this value.
The damping torque,
MB, can be expressed as [
28]:
where
B is the damping coefficient of the propeller, and its value is related to the contact area between the propeller and the water body. The entanglement, jamming, and falling off of the propeller will affect the value of the coefficient, and the effect of falling off is weak.
According to (7) and (8), when combined with the rotation direction of the thruster, the load torque of the thruster is converted to:
From (7) to (9), it can be established that the fault of the thruster will change the corresponding coefficient of
k or
B. Therefore, this paper uses
k and
B as the characteristic parameters for the fault diagnosis of the thruster. The values of
k and
B cannot be directly obtained. The change in characteristic parameters can be inferred, according to the change in thruster load and the corresponding relationship between the faults and characteristic parameters. The specific relationship is shown in
Table 1.
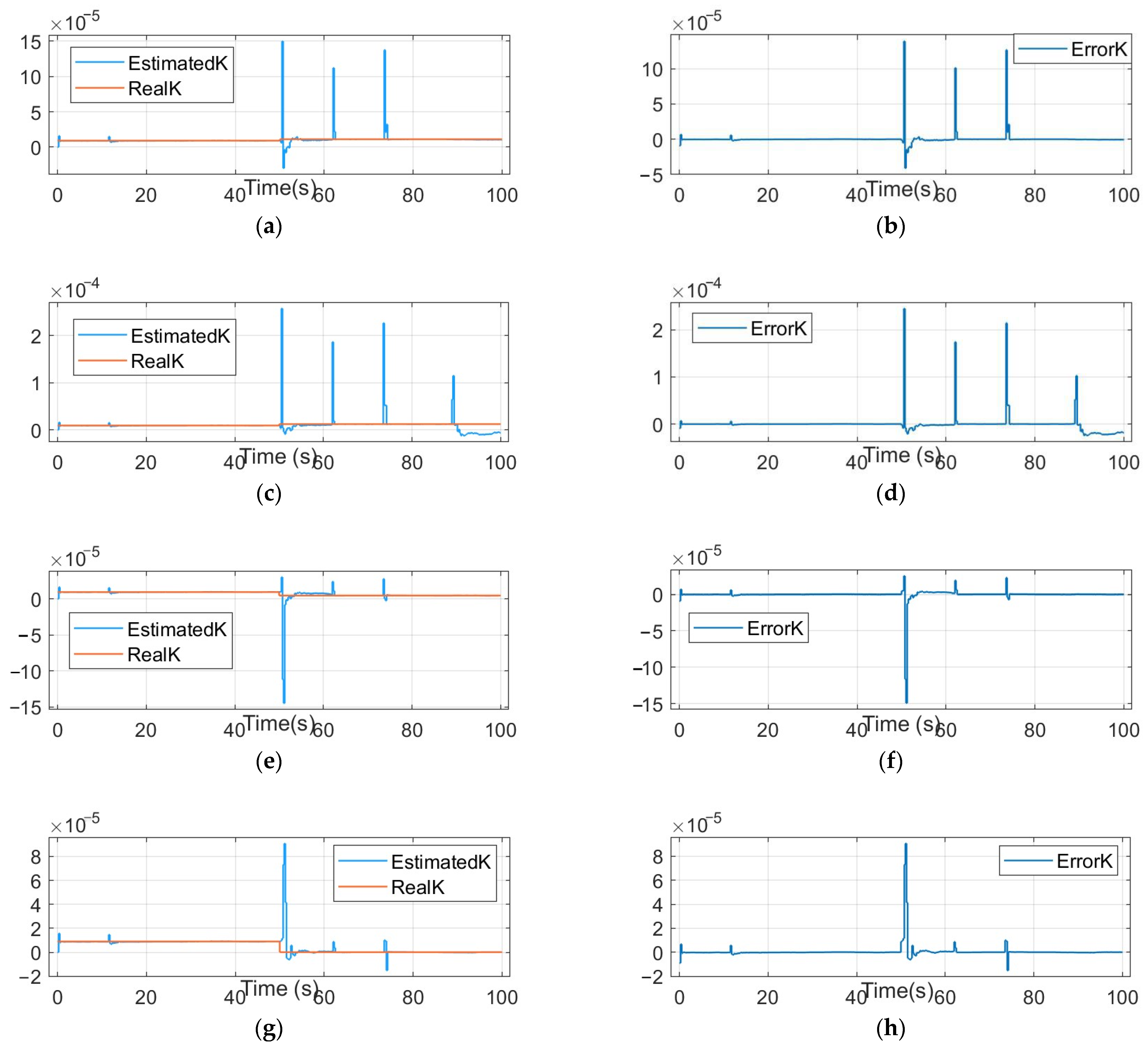
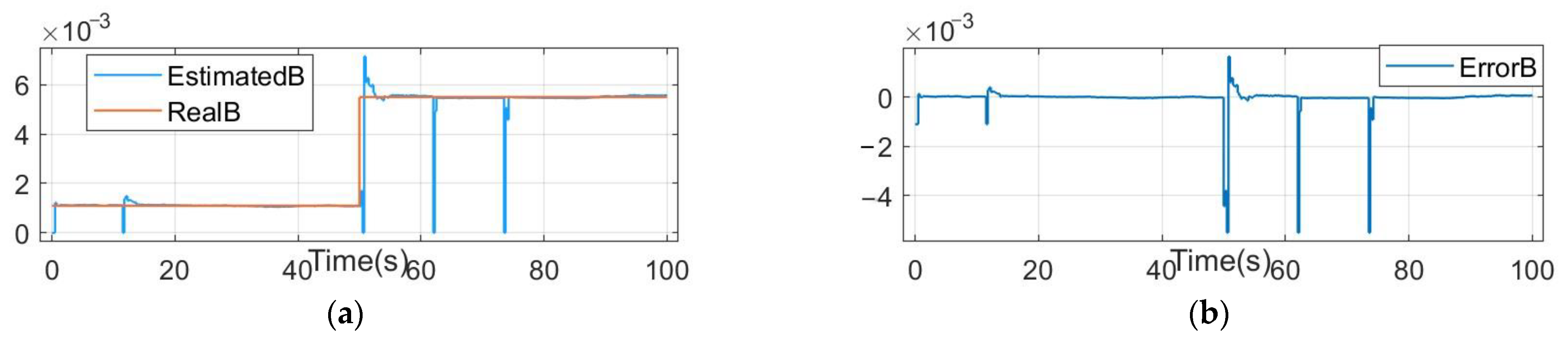
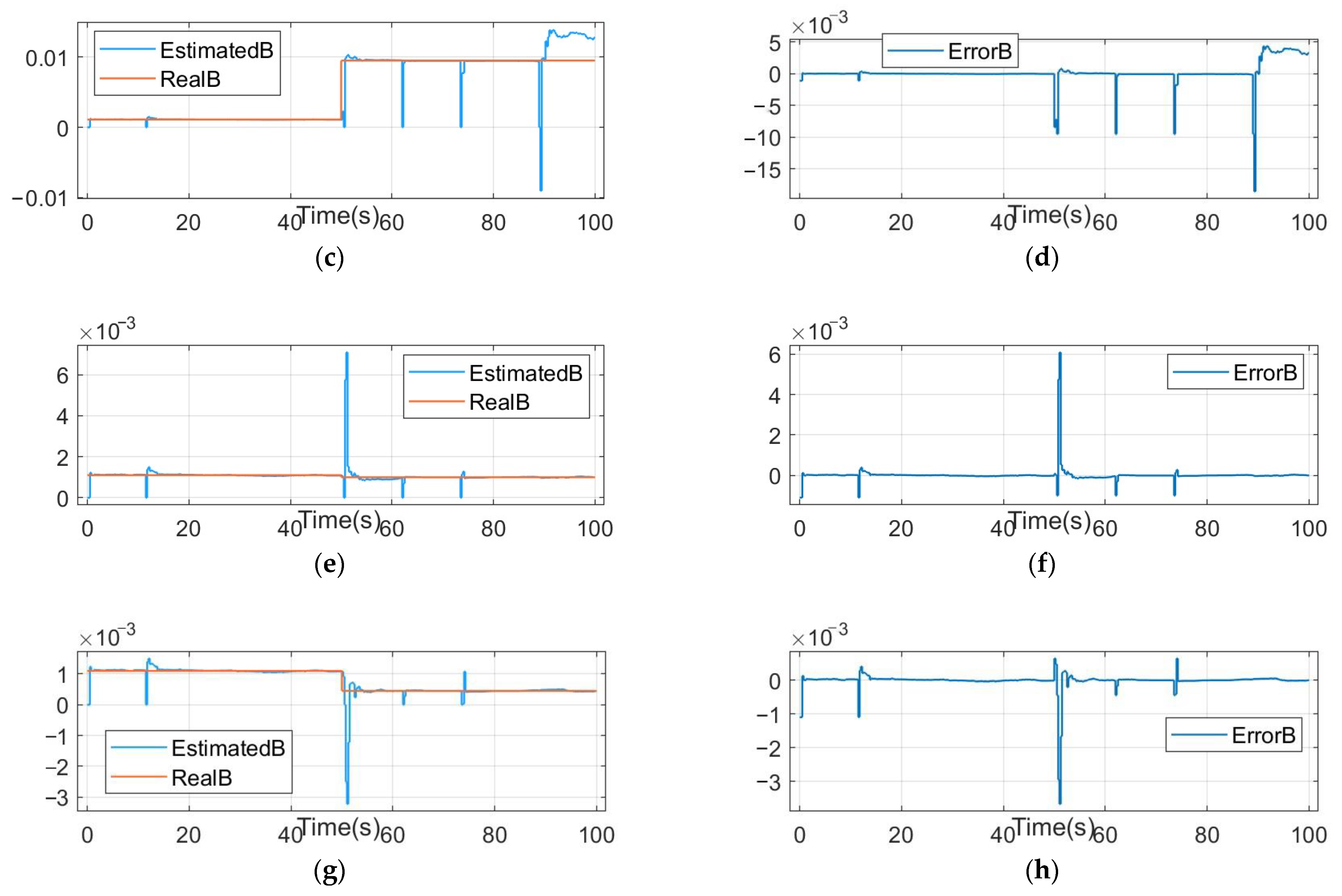
According to the above analysis, the problems of thruster fault diagnosis are mainly divided into three stages: first, the thruster load TL is estimated, according to the thruster mathematical model. Second, the thruster fault characteristic parameters, k and B, are identified according to the estimated thruster load. Third, we define the value range of the characteristic parameters corresponding to the different faults of the thruster, and classify the identified characteristic parameters, k and B, into the corresponding fault types according to this range.
3. Thruster Fault Diagnosis
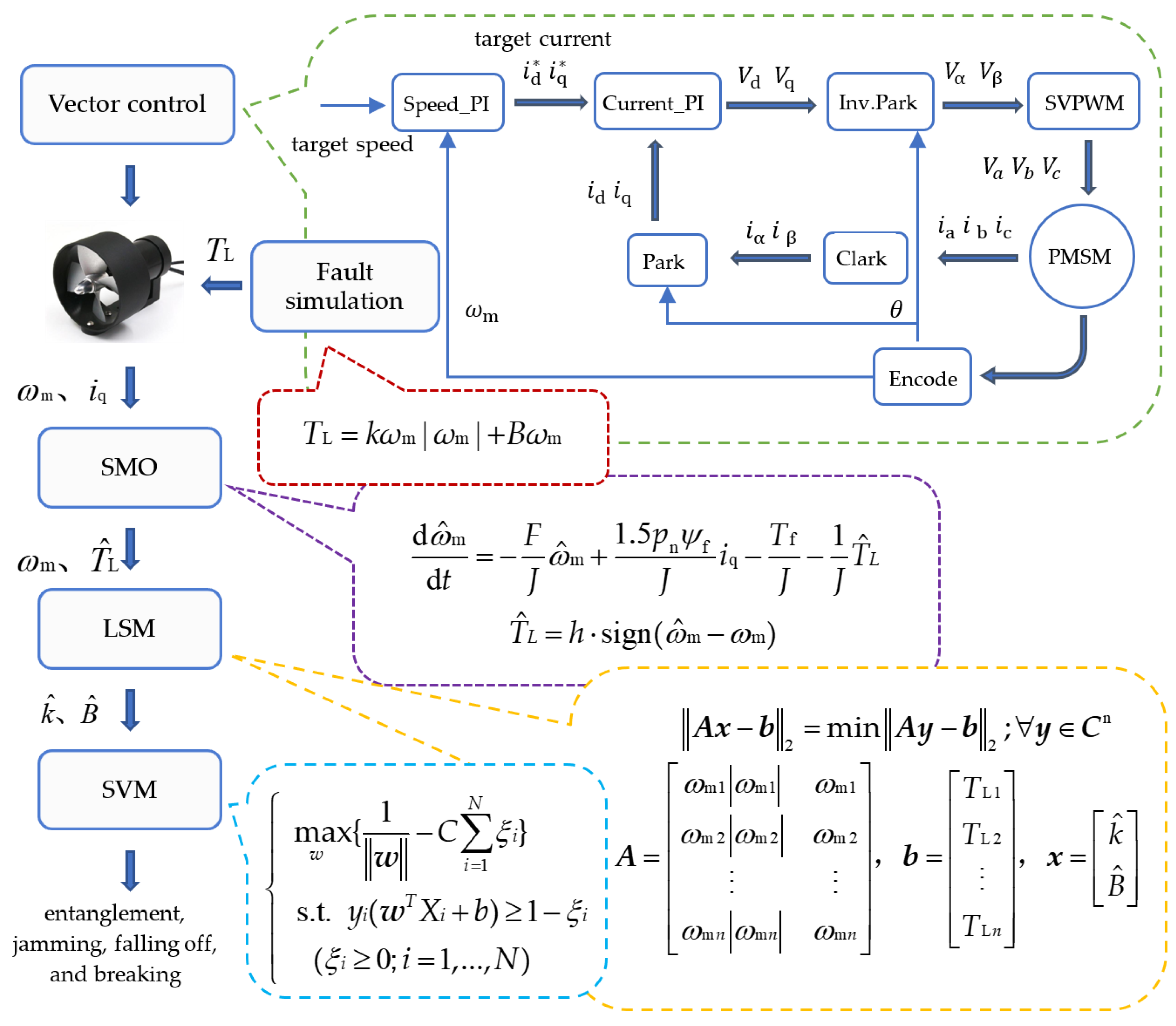
The thruster fault diagnosis process proposed in this paper is shown in
Figure 2. The double closed-loop vector control and fault simulation are necessary components for the operation of the thruster. The sliding mode observer (SMO), the least square method (LSM), and the support vector machine (SVM) are the parts of the thruster fault diagnosis. The double closed-loop vector control includes the speed loop and current loop control. The input is the target speed of the thruster, and the output is the actual speed of the thruster,
ωm, and the q-axis current,
iq. In the fault simulation part, according to the characteristic parameters
k and
B, the load torque,
TL, is applied to the thruster to simulate the different fault types of the thruster. The SMO estimates the thruster load torque,
, based on the inputs
ωm and
iq. The LSM identifies the fault characteristic parameters
and
, based on the inputs
ωm and
. The support vector machine realizes the classification of the thruster fault pattern, according to the trained classification model and the fault characteristic parameters,
and
.
3.1. Load Torque Estimation
The SMO can reduce the estimation error of all states to zero in a limited time, which can be used to solve the problem of sensor fault diagnosis and reconstruction [
29]. SMO is widely used in the field of motor control. Compared with the Lomborg observer, extended Kalman filter observer, and other observers, it has the advantages of a simple structure, a small code amount, and few debugging parameters. In this paper, the SMO is used to reduce the propeller speed error to zero, according to the input and output of the propeller system, and then the load torque
TL of the propeller is estimated.
According to (4) and (5),the deformation of the mechanical motion equation of the propeller is:
where
Ld =
Lq for a surface-mounted rotor PMSM.
According to (10), the SMO is designed as:
where
and
are the estimation of the mechanical angular velocity and load torque of the propeller, respectively.
h is the sliding mode gain, and sign() is the sign function.
According to (10) and (11), it gives
where
is the torque error and
is the mechanical angular velocity error of the thruster.
According to Equation (13), if converges to , converges to , and then . The sliding mode gain, h, determines whether the system converges and also the rate of convergence. If the sliding mode gain is set to be too small, the system diverges. If the sliding mode gain is set to be too large, the system will converge but will produce large error fluctuations. Therefore, the selection of the sliding mode gain should be appropriate.
To calculate the value range of sliding mode gain
h, let
, and we introduce the Lyapunov function:
To satisfy the global asymptotic stability of the system at the equilibrium point,
s = 0, then:
is obviously true. If
is true, according to Equation (13),
h should meet:
To reduce the error fluctuation under the condition that the sliding mode observer converges, the load torque
of the sliding mode observer is expressed as:
At this point, when the error between the estimated speed and the actual speed of the propeller is greater than the threshold H (H ≥ 1), the absolute value of the sliding mode gain is h∙H, and the observer converges quickly. When the error is less than or equal to the threshold, H, the absolute value of the sliding mode gain is less than h∙H. With the decrease in the error, , the fluctuation of the estimated load torque, , is smaller.
3.2. Parameter Identification
There are many methods for parameter identification. The LSM is the most widely used classical algorithm for parameter identification problems. It has the characteristics of a simple objective function, zero minimum objective function value, and moderate computation [
30]. This method is applied to the identification of the thruster fault characteristic parameters,
k and
B.
Theoretically,
k and
B can be solved according to the two groups of information in
TL and
ωm. However, using the estimated values of the torque and speed of the thruster to solve the equations may lead to contradictions and cannot obtain the solutions in the usual sense. At this point, we find
and
, and make
and
TL the closest to represent the solution of the problem, which is usually represented by a 2-norm:
where
x is the least-square solution of the thruster fault characteristic parameters,
n is the number of rows of the least squares matrix,
A, and the size of
n will affect the accuracy and speed of parameter identification.
is the set of
n-dimensional complex vectors, and
y is an element in the
set.
n groups of data are intercepted through the time window, and the identification of fault characteristic parameters is realized, according to Equation (9). The identification result is:
where pinv(
A) is the pseudo-inverse of matrix
A.
3.3. Fault Pattern Classification
SVM and random forest methods, as used in ensemble learning, are common pattern classification methods. With a simple structure, global optimality, and good generalization ability, the SVM is a common and effective algorithm for solving problems such as pattern classification and function estimation [
31], but it performs poorly on large data sets. The accuracy of the random forest method is very high, and it can effectively run using large data sets, but the space and time required for training are large, and the real-time performance is poor. The data samples in this paper are small, and algorithms with high real-time performance are needed to achieve the real-time fault diagnosis of thrusters. Therefore, this paper selects the SVM method to train the fault characteristic parameters k and B, identified in
Section 3.2 and realizes the fault mode classification.
The application of an SVM in thruster fault diagnosis can be divided into two steps: the establishment of the thruster fault classification model, and thruster fault pattern classification. The basic idea of the fault classification model is to find an optimal decision boundary. The decision boundary separates the positive and negative classes of the training set data samples, which maximizes the distance from any sample to the decision boundary. Thruster fault pattern classification is used to classify the data samples of a test set into the different fault types, according to the established classification model.
The input data
X and learning objective
Y of the training set samples are:
where the input data include
N samples, and each sample
contains a set of thruster fault characteristic parameters. The learning target sample
of the binary variable corresponds to the input data samples one by one, indicating thruster failure (negative class) and normal activity (positive class).
Let the normal vector of the decision boundary be
and the decision boundary be expressed as:
where
b is the intercept of the decision boundary.
In order to make classification accurate and establish a classification interval, then:
At this time, the distance
ds from the vector
xs on the classification interval to the decision boundary is:
Therefore, the problem of thruster fault classification is transformed into the problem of the conditional maximum:
In the process of thruster fault diagnosis, the fault characteristic parameters
k and
B, when estimated individually, will deviate from their classification. If the classification is strictly via Equation (24), some data will be too close to the decision boundary, or even cannot be divided. To solve the above problems, the above formula is adjusted as:
where
ξi is the relaxation variable, and its value determines the classification basis of the
i-th vector.
C is the penalty coefficient, which indicates the tolerance of classification according to the relaxation variables. The larger the value, the more intolerable the classification.
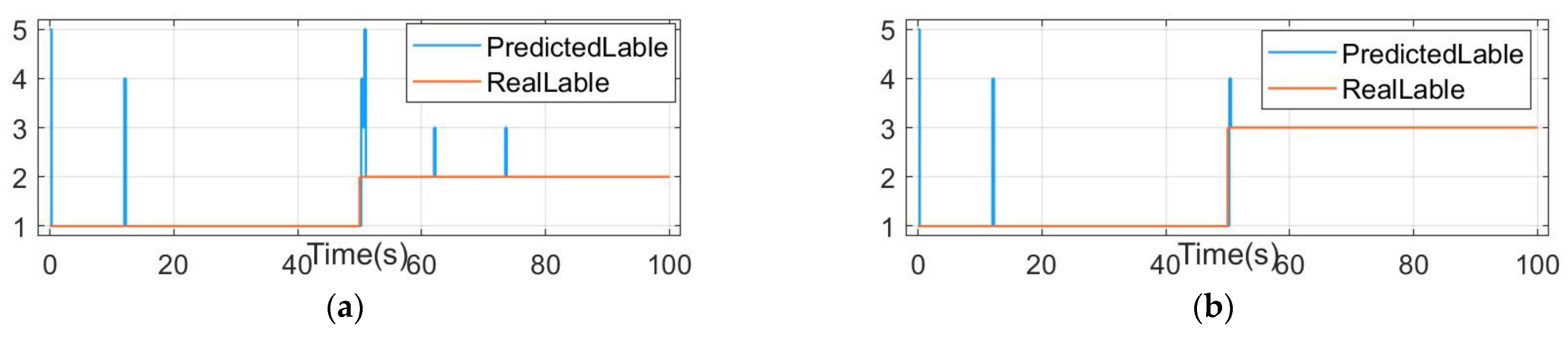
The data of offline modeling come from the characteristic parameter signals of various fault patterns, as obtained from simulation tests. Equation (25) is a binary classification model of the thruster state. For the four types of thruster failure patterns discussed in this paper, SVM is used to establish several pairwise binary classification models for thruster failure pattern classification.
5. Conclusions
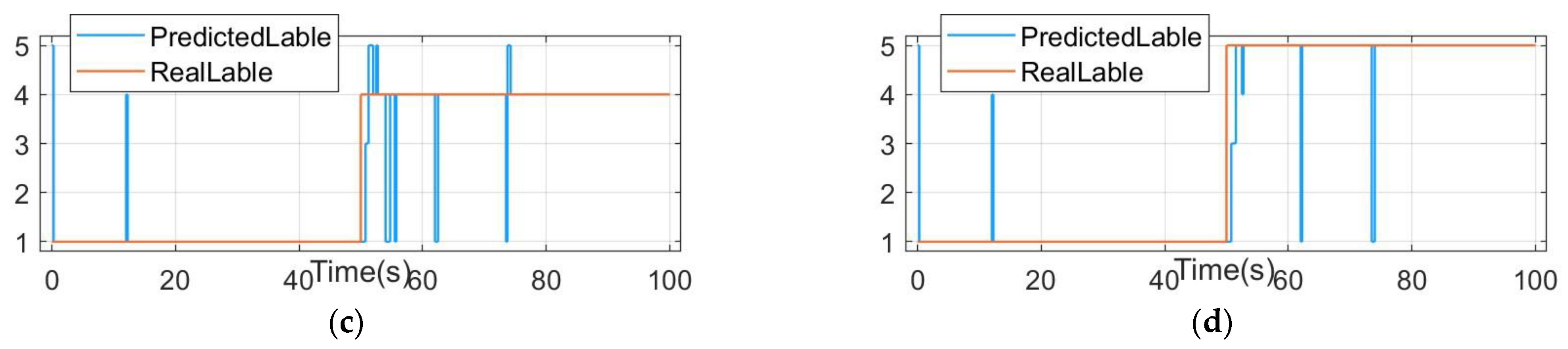
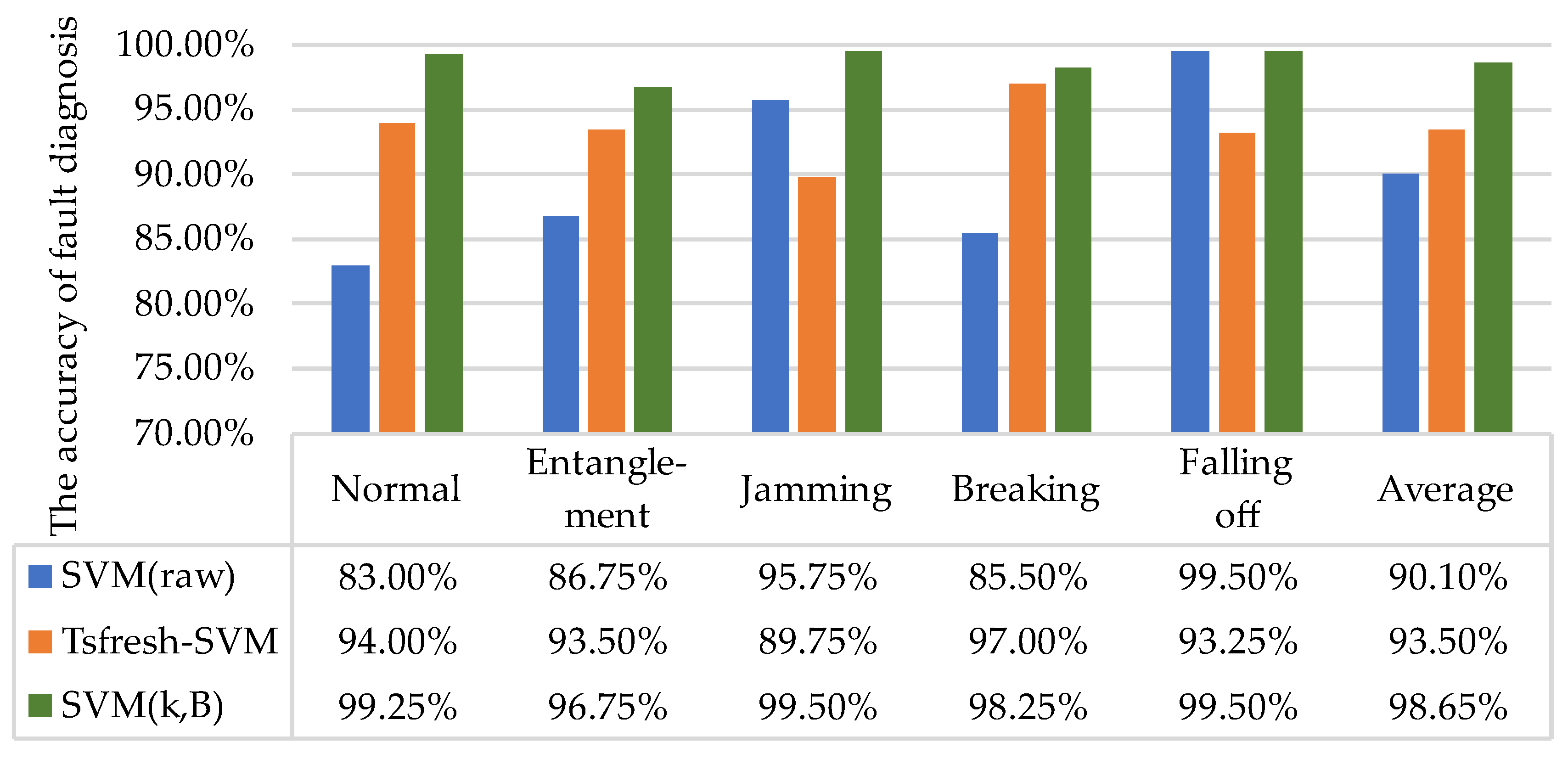
Aiming at identifying the typical faults of thrusters, this paper presents a fault diagnosis method based on thruster load feature extraction. By analyzing the load torque characteristics of propeller entanglement, jamming, breaking, falling off, and other faults, a thruster fault load torque model is established. SMO, LSM, and SVM are used to estimate the thruster load, identify the fault characteristic parameters and classify the fault patterns. The simulation results show that the proposed method is feasible in the fault pattern classification of underwater thrusters, and the accuracy of correctly identifying the fault type of thrusters within 5 s after the thruster fault occurs reaches more than 95%. In addition, three groups of contrast experiments are designed to compare the accuracy of fault diagnosis of thrusters in a single state. The results show that the fault diagnosis method based on thruster load feature extraction has the highest minimum accuracy and average accuracy for thruster fault diagnosis, which are 96.75% and 98.65% respectively.
The fault diagnosis method in this paper offers great advantages in terms of accuracy and stability, but the effectiveness of this method needs to be further verified in the real-world environment. Therefore, in future works, we plan to embed the fault diagnosis method into the underwater thruster drive system, verify the effectiveness of the fault diagnosis method on the real thruster, and realize the real-time online fault diagnosis of the thruster, taking advantage of the rapidity and accuracy of the fault diagnosis method to find faults in the propeller in good time and take measures to reduce its loss.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}