
Anomalous Behavior Detection Based on the Isolation Forest Model with Multiple Perspective Business Processes

Abstract
:1. Introduction
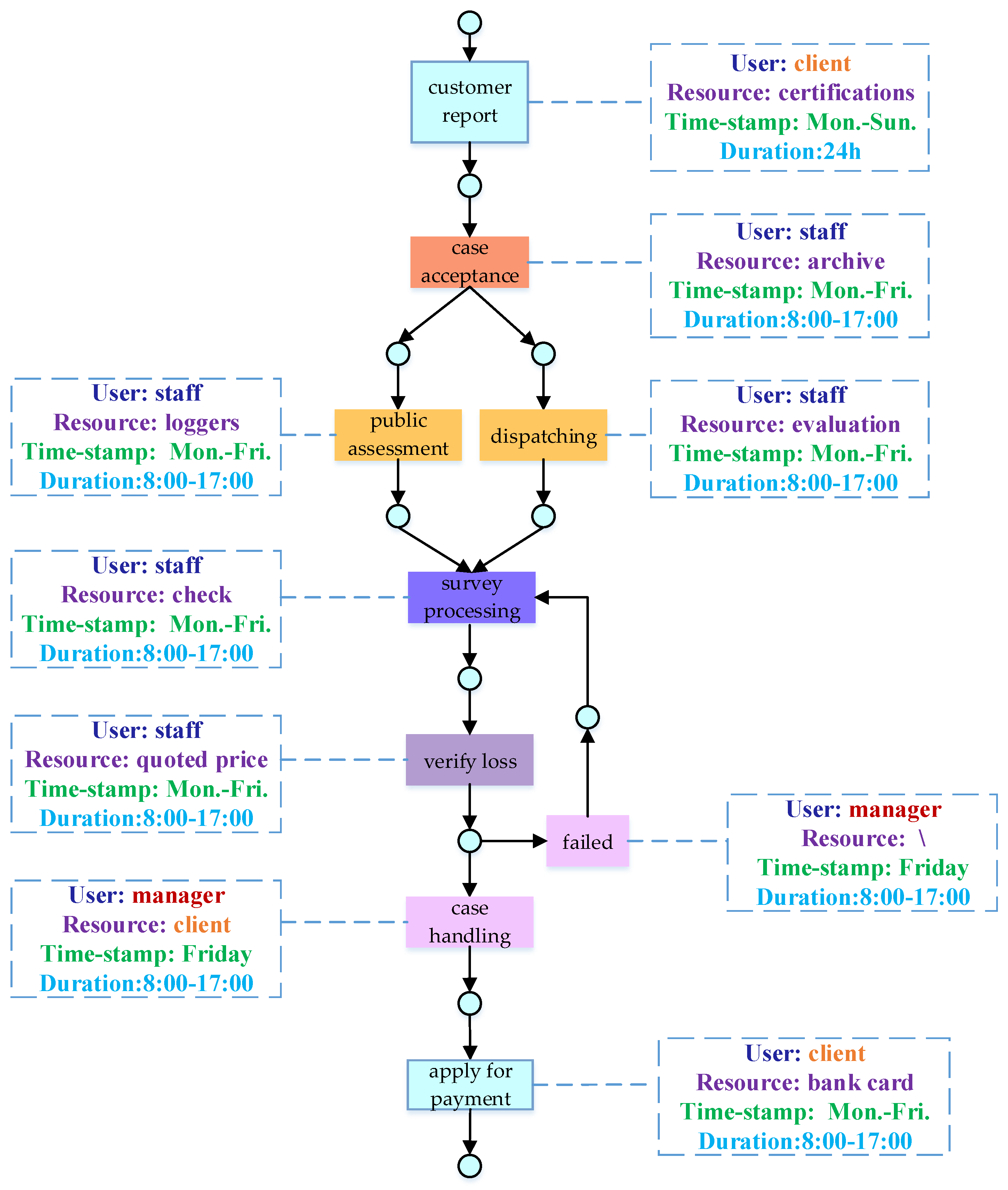
2. Problem Statement
3. Related Works
4. Preliminary
4.1. Behavioral Relationships in Event Logs
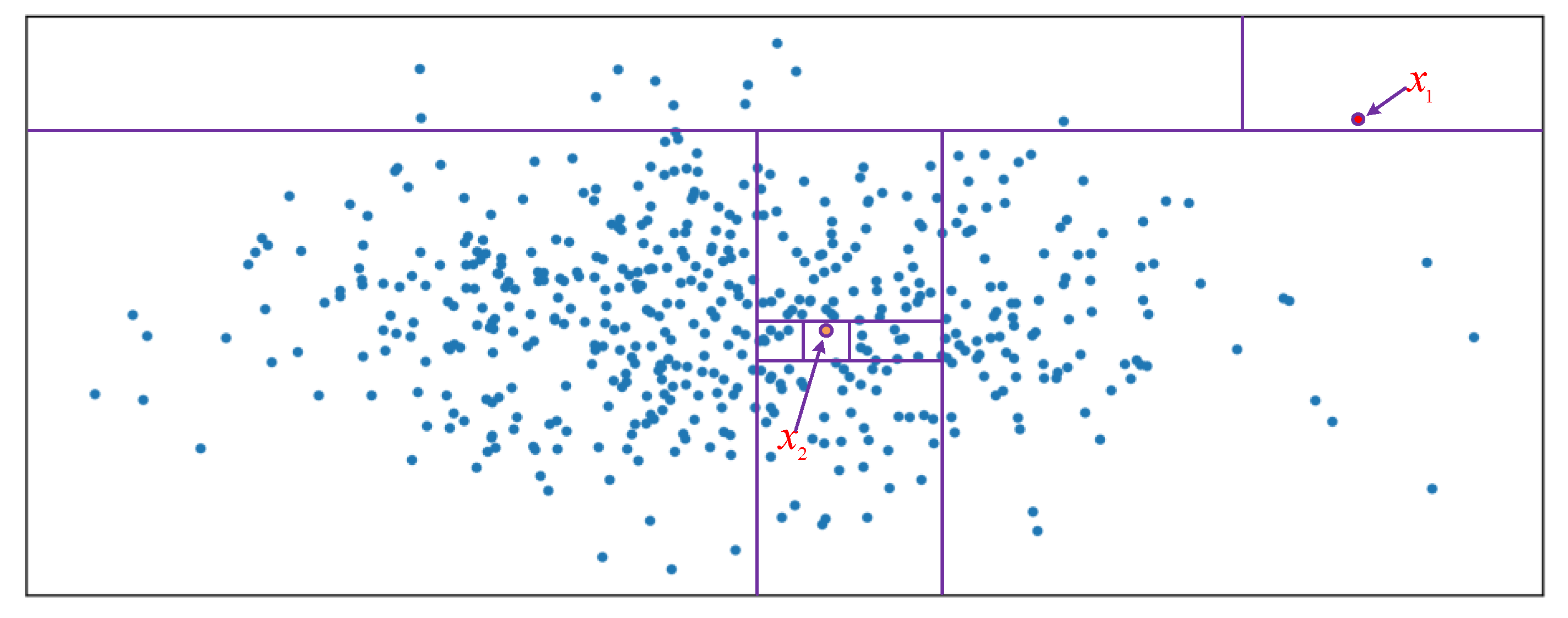
4.2. Anomaly Detection Based on the Isolation Forest Model
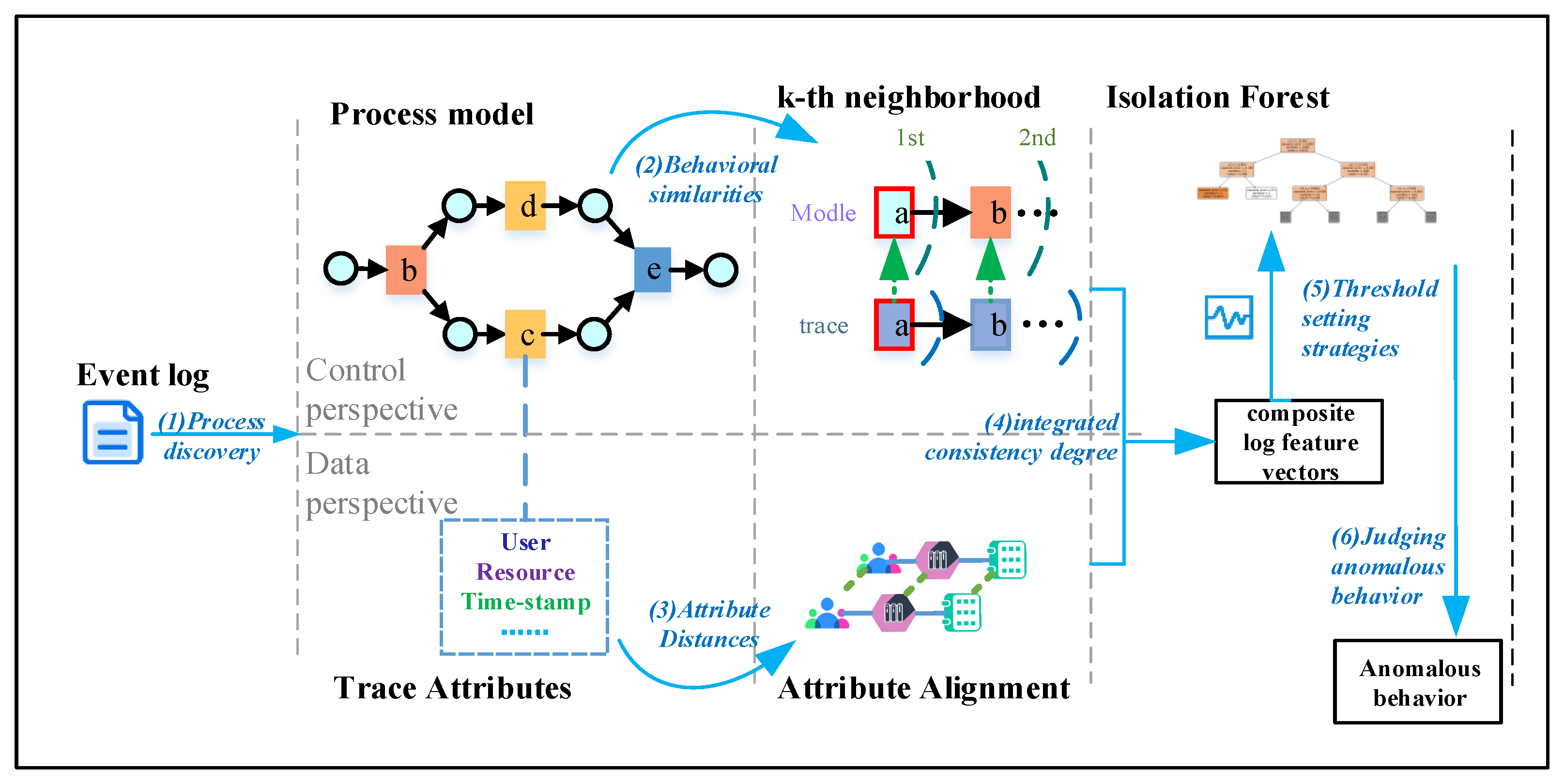
5. Multi-View Process Similarity Metric
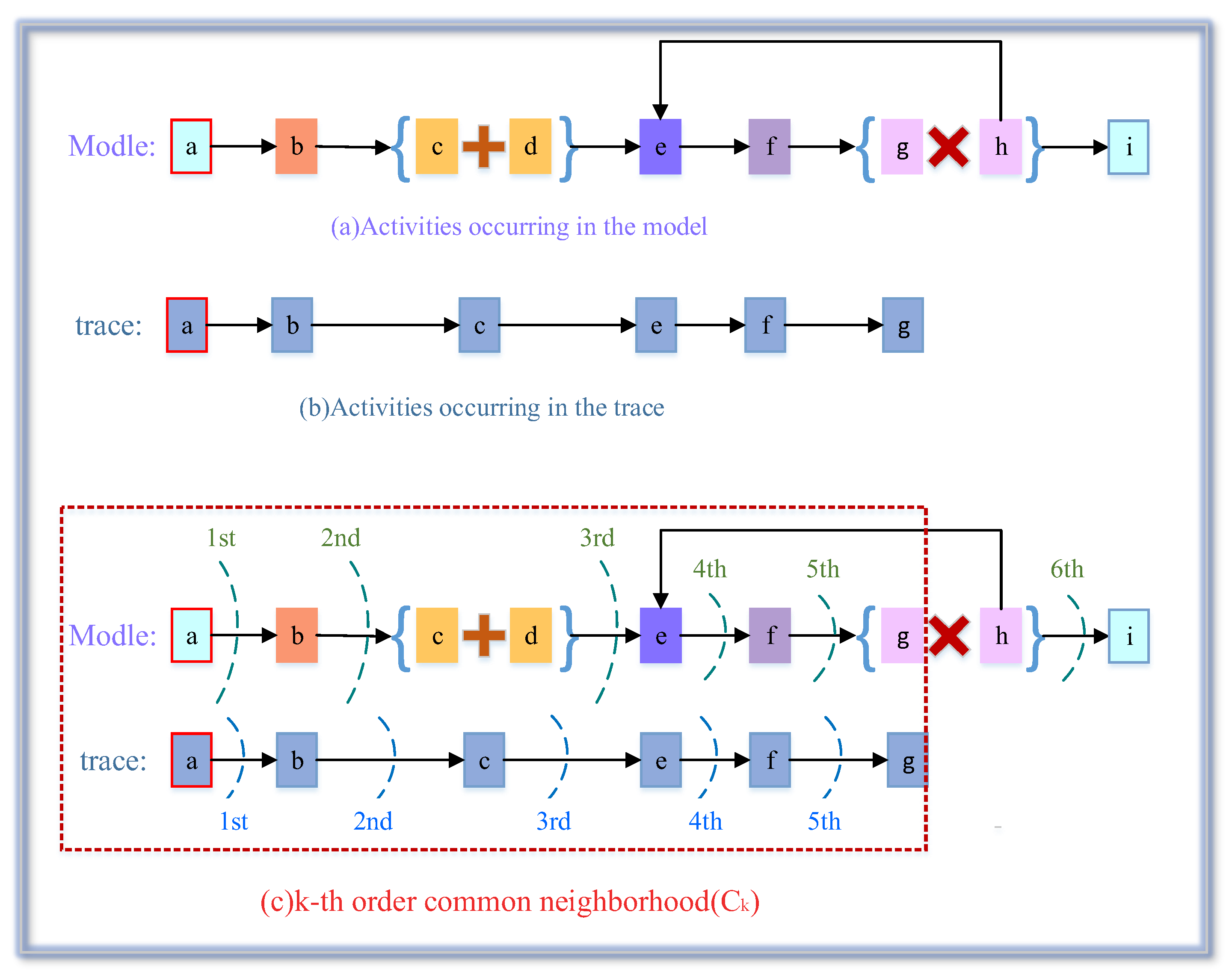
5.1. Behavioral Similarity Analysis Based on K-order Neighborhoods
| Algorithm 1: Calculation of Behavioral Conformance Degree |
 |
5.2. Alignment-Based Attribute Distance Metric
| Algorithm 2: Calculation of Attribute Conformance Degree |
 |
6. Anomalous Behavior Detection Using Isolation Forests
| Algorithm 3: Detect anomalous behavior |
 |
7. Evaluation
7.1. Experimental Setup
- Skip: some required event (no more than 3) is skipped during execution;
- Insertion: some random activity is added during execution (no more than 3);
- Rework: during execution, some events are repeated (no more than 3);
- Advance: during execution, some events occur earlier (no more than 2);
- Delay: during execution, some events are delayed (no more than 2);
- Attributes: during execution, the attributes of some events were incorrectly set (more than 3).
7.2. Experimental Results
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nolle, T.; Luettgen, S.; Seeliger, A.; Mühlhäuser, M. BINet: Multi-perspective business process anomaly classification. Inf. Syst. 2022, 103, 101458. [Google Scholar] [CrossRef] [Green Version]
- Burattin, A.; Josep, C. A Framework for online conformance checking. In Business Process Management Workshops. In Business Process Management Workshops; Springer: Cham, Switzerland, 2018; Volume 308, pp. 165–177. [Google Scholar] [CrossRef] [Green Version]
- Breunig, M.M.; Kriegel, H.-P.; Ng, R.T.; Sander, J. LOF: Identifying density-based local outliers. In Proceedings of the 2000 ACM SIGMOD International Conference on Management of Data—SIGMOD ‘00, Dallas, TX, USA, 15–18 May 2000; Association for Computing Machinery: New York, NY, USA, 2000; pp. 93–104. [Google Scholar] [CrossRef]
- Christy, A.; Gandhi, G.M.; Vaithyasubramanian, S. Cluster Based Outlier Detection Algorithm for Healthcare Data. Procedia Comput. Sci. 2015, 50, 209–215. [Google Scholar] [CrossRef] [Green Version]
- Pillutla, M.R.; Raval, N.; Bansal, P.; Srinathan, K.; Jawahar, C.V. LSH based outlier detection and its application in distributed setting. In Proceedings of the 20th ACM International Conference on Information and Knowledge Management—CIKM ’11, Glasgow, UK, 24–28 October 2011; Association for Computing Machinery: New York, NY, USA, 2011; pp. 2289–2292. [Google Scholar] [CrossRef] [Green Version]
- Mannhardt, F.; de Leoni, M.; Reijers, H.A.; van der Aalst, W.M.P. Balanced multi-perspective checking of process conformance. Computing 2016, 98, 4. [Google Scholar] [CrossRef] [Green Version]
- Sani, M.F.; van Zelst, S.J.; van der Aalst, W.M.P. Repairing Outlier Behaviour in Event Logs using Contextual Behaviour. Enterp. Model. Inf. Syst. Archit. (EMISAJ) 2019, 14, 115–131. [Google Scholar] [CrossRef]
- Nolle, T.; Luettgen, S.; Seeliger, A.; Mühlhäuser, M. Analyzing business process anomalies using autoencoders. Mach. Learn. 2018, 107, 1875–1893. [Google Scholar] [CrossRef] [Green Version]
- Bezerra, F.; Wainer, J. Algorithms for anomaly detection of traces in logs of process aware information systems. Inf. Syst. 2013, 38, 33–44. [Google Scholar] [CrossRef]
- Genga, L.; Alizadeh, M.; Potena, D.; Diamantini, C.; Zannone, N. Discovering anomalous frequent patterns from partially ordered event logs. J. Intell. Inf. Syst. 2018, 51, 257–300. [Google Scholar] [CrossRef]
- Van Zelst, S.J.; Bolt, A.; Hassani, M.; van Dongen, B.F.; van der Aalst, W.M.P. Online conformance checking: Relating event streams to process models using prefix-alignments. Int. J. Data Sci. Anal. 2019, 8, 269–284. [Google Scholar] [CrossRef] [Green Version]
- Ghionna, L.; Greco, G.; Guzzo, A.; Pontieri, L. Outlier detection techniques for process mining applications. In Foundations of Intelligent Systems; Springer: Berlin, Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Neto, R.V.; Tavares, G.; Ceravolo, P.; Barbon, S. On the use of online clustering for anomaly detection in trace streams. In Proceedings of the XVII Brazilian Symposium on Information Systems, Uberlândia, Brazil, 7–10 June 2021; ACM: Uberlândia, Brazil, 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Mozaffari, M.; Yilmaz, Y. Online Anomaly Detection in Multivariate Settings. In Proceedings of the 2019 IEEE 29th International Workshop on Machine Learning for Signal Processing (MLSP), Pittsburgh, PA, USA, 13–16 October 2019; IEEE: Pittsburgh, PA, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Laxhammar, R.; Falkman, G. Online Learning and Sequential Anomaly Detection in Trajectories. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 6. [Google Scholar] [CrossRef] [PubMed]
- Böhmer, K.; Rinderle-Ma, S. Multi Instance Anomaly Detection in Business Process Executions. In Business Process Management; Carmona, J., Engels, G., Kumar, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- De Leoni, M.; Felli, P.; Montali, M. "Integrating BPMN and DMN: Modeling and Analysis. J. Data Semant. 2021, 10, 165–188. [Google Scholar] [CrossRef]
- Tavares, G.M.; da Costa, V.G.T.; Martins, V.E.; Ceravolo, P.; Barbon, S. Anomaly Detection in Business Process based on Data Stream Mining. In Proceedings of the XIV Brazilian Symposium on Information Systems—SBSI’18, Caxias do Sul, Brazil, 4–8 June 2018; Association for Computing Machinery: Caxias do Sul, Brazil, 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Ebrahim, M.; Golpayegani, S.A.H. Anomaly detection in business processes logs using social network analysis. J. Comput. Virol. Hack. Tech. 2022, 18, 127–139. [Google Scholar] [CrossRef]
- Van der Aalst, W.M.P. Process Mining: Data Science in Action, 2nd ed.; Springer: Berlin, Heidelberg, Germany, 2016. [Google Scholar]
- Chan, N.N.; Yongsiriwit, K.; Gaaloul, W.; Mendling, J. Mining Event Logs to Assist the Development of Executable Process Variants. In Advanced Information Systems Engineering; Springer: Thessaloniki, Greece, 2014; Volume 8484, pp. 548–563. [Google Scholar] [CrossRef]
- Polyvyanyy, A.; Smirnov, S.; Weske, M. Business process model abstraction. In Handbook on Business Process Management 1; Springer: Berlin, Heidelberg, Germany, 01 January 2014; pp. 147–165. [Google Scholar] [CrossRef]
- Fang, X.; Wu, J.; Liu, X. An Optimized Method of Business Process Mining Based on the Behavior Profile of Petri Nets. Inf. Technol. J. 2013, 13, 86–93. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.T.; Ting, K.M.; Zhou, Z.-H. “Isolation Forest. In Proceedings of the 2008 Eighth IEEE International Conference on Data Mining; IEEE: Pisa, Italy, 19 December, 2008; pp. 413–422. [Google Scholar] [CrossRef]
- Liu, F.T.; Ting, K.M.; Zhou, Z.-H. "Isolation-Based Anomaly Detection. ACM Transactions on Knowledge Discovery from Data 2012, 6, 1–39. [Google Scholar] [CrossRef]
- Bloemen, V.; Van Zelst, S.; Van der Aalst, W.; Van Dongen, B.; Van de Pol, J. Aligning observed and modelled behaviour by maximizing synchronous moves and using milestones. Information Systems 2022, 103, 101456. [Google Scholar] [CrossRef]
- Raschka, S. Python Machine Learning; Packt Publishing Ltd.: Birmingham, UK, 2015. [Google Scholar]
- Mannhardt, F.; Blinde, D. Analyzing the Trajectories of Patients with Sepsis using Process Mining. RADAR 2017, 1859, 72–80. [Google Scholar]
- Wressnegger, C.; Schwenk, G.; Arp, D.; Rieck, K. A close look on n-grams in intrusion detection. In Proceedings of the 2013 ACM Workshop on Artificial Intelligence and Security, Berlin, Germany, 4 November 2013; Association for Computing Machinery: New York, NY, USA, 4 November, 2013; pp. 67–76. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event Id | Case Id | Activity | User | Resource | Timestamp |
|---|---|---|---|---|---|
| … | … | … | … | … | … |
| 671 | 476 | a | client | certifications | Monday |
| 672 | 476 | b | staff | archive | Monday |
| 673 | 477 | h | manager | \ | Thursday |
| 674 | 476 | c | staff | loggers | Tuesday |
| 675 | 477 | e | staff | check | Wednesday |
| 676 | 478 | a | client | certifications | Monday |
| 677 | 476 | e | staff | check | Wednesday |
| 678 | 476 | f | staff | quoted price | Thursday |
| 679 | 478 | b | staff | archive | Tuesday |
| 680 | 476 | g | manager | staff | Friday |
| 681 | 477 | d | staff | evaluation | Tuesday |
| … | … | … | … | … | … |
| Judgment | |||
|---|---|---|---|
| Abnormal | Normal | ||
| Actual | Abnormal | TA | FN |
| Normal | FA | TN | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, N.; Fang, X.; Lu, K. Anomalous Behavior Detection Based on the Isolation Forest Model with Multiple Perspective Business Processes. Electronics 2022, 11, 3640. https://doi.org/10.3390/electronics11213640
Fang N, Fang X, Lu K. Anomalous Behavior Detection Based on the Isolation Forest Model with Multiple Perspective Business Processes. Electronics. 2022; 11(21):3640. https://doi.org/10.3390/electronics11213640
Chicago/Turabian StyleFang, Na, Xianwen Fang, and Ke Lu. 2022. "Anomalous Behavior Detection Based on the Isolation Forest Model with Multiple Perspective Business Processes" Electronics 11, no. 21: 3640. https://doi.org/10.3390/electronics11213640