
Improving Path Accuracy of Mobile Robots in Uncertain Environments by Adapted Bézier Curves

Abstract
:1. Introduction
2. Background
3. Materials and Methods
3.1. Technical Prerequisites for the Proposed Method
- Bézier curve always passes through and ;
- Bézier curve is always tangent to the lines connecting and at and , respectively;
- Bézier curve always lies within the convex hull consisting of its control points.
3.2. Brief Description of the Proposed Algorithm and Its Importance
- Collisions can be detected a number of seconds before they happen, therefore offering the guided robot the choice between stopping and switching to a new route. The current route is considered wrong if the trajectory of the obstacle collides with the trajectory of the guided robot, or if following the current route would result in a critical distance between the robot and the obstacles.
- The predicted positions can be adapted to enhance the safety of the path. Let us consider that the guided robot has to surpass two relatively close mobile obstacles. Both obstacles are moving at a distance of less than 2 m to the guided robot. If one of the obstacles slightly approaches the guided robot, meaning that the distance between these two decreases, the waypoint which corresponds to the closest obstacle can be adapted. Gradually moving the more dangerous waypoint, the one which is closest to the guided robot, toward the less dangerous waypoint, the Bezier curve gradually balances the distance toward both closest obstacles.
3.3. Developing Real-World Simulation Stages for Path-Planning Use Cases
- : navigation speed (maximum target 1.6 m/s);
- : vital navigation space (minimum target 30 × 30 cm);
- : planned curve tolerance (maximum target 3–15 cm).
- C1: the obstacles width and height (maximum target width × height: 600 × 500 mm);
- C2: the velocity of the mobile obstacle (target 0.85 m/s, there were also videos with 1.8 and 1 m/s);
- C3: the direction of the mobile obstacles: straight lines with 90-degree edges;
- C4: the shape of the boundaries of the maneuvering space: rectangular space;
- C5: the density of the fixed obstacles: 6 and 9 depending on scenario;
- C6: the density of the mobile obstacles: 1, 5, 10, 15 obstacles, depending on scenario;
- C7: the direction of the mobile obstacles as compared to the robot’s direction: perpendicular, tangent, parallel.
- Strong connection between the constraint and performance indicator = 9;
- Average connection between the constraint and performance indicator = 3;
- Weak connection between the constraint and performance indicator = 1;
- No connection between the constraint and performance indicator = 0.
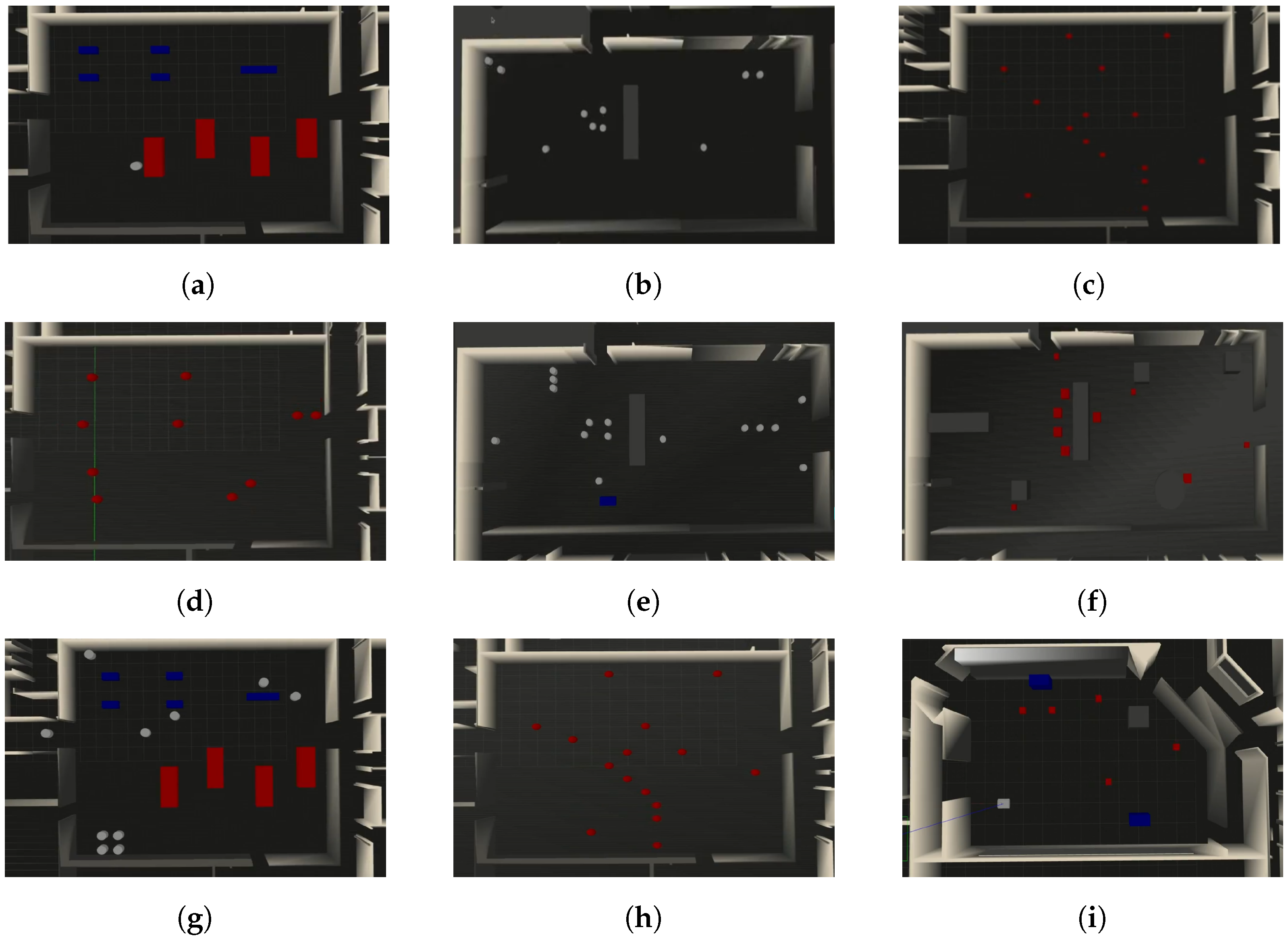
- (a)
- Stage 1—“A day in a library.” The four blue rectangles represent the study banks. The large blue rectangle represents the book registration office. The red rectangles represent the bookshelves. The white disc represents a person looking for a book.
- (b)
- Stage 2—“Gym”. The ten white circles represent children performing various activities in the gym (four children tell a story, two pairs of children run, two children measure the land to form two squares). The gray rectangle is a space intended for gymnastics exercises. In order to carry out these exercises safely, the gray space must remain free.
- (c)
- Stage 3—“Robots’ room”. The fifteen red circles represent robots that bring, carry, and place documents in the room. The room’s walls have windows through which the robots receive or give documents.
- (d)
- Stage 4—“Renovating room”. The ten red circles represent cleaning robots. Their movements helped to clean the floor because the owners were not careful when they painted the room.
- (e)
- Stage 5—“Improved gym.” The fifteen white circles represent children. Four of the children tell stories. Two came together in the room; they argued, moved apart, and got back together after a few moments. Two groups of three students compete; one child dances, and two children measure squares to understand geometry better. The grey rectangle represents free space for jumping.
- (f)
- Stage 6—“Automatic room for gifts.” The ten red squares represent robots. The gray rectangles and squares represent tables. Small gifts are placed on the small gray squares to be wrapped. The room’s walls have windows for people to place small gifts directly on the tables. The small red squares represent the robots that spin around the table to wrap gifts. Near the doors, two robots ensure that no unauthorized person enters. The gray cube at the top right of the room is the space where the cards and labels are stored. The red square that moves to this gray cube brings the labels and cards closer to the gifts. The second robot moves back to the gray rectangle in the middle of the room to the table on which the gifts are stored until they are enriched with an address and a card. After they are stored, the robots take the gift and send it back to the person.
- (g)
- Stage 7—“The Library.” Inside this stage are two types of fixed obstacles: the red and the blue bodies. Red is used for the shelves and blue for the desks. The ten light gray cylinders are the pupils who look for books, the librarian, and their assistant.
- (h)
- Stage 8—“Faster cleaning”. The red bodies denote cleaning robots that are deployed to clean the conference room.
- (i)
- Stage 9—“Interaction of faster robots.” The five red cubes are robots programmed to move faster. The two blue parallelepipedic bodies are workbenches. The gray parallelepiped is also a fixed obstacle. Inside this room, there is also a light gray rectangle representing the map’s origin, i.e., inside this body, the robot’s coordinates are considered to be (0,0,0).
3.4. The Simulation Environment
3.5. The Robot’s Specifications
- Two Maxon MDP TS10439 motors that drive two tracks;
- Two US Digital-S4T encoders;
- One Roboteq motor driver;
- One Sick TIM561 Lidar;
- One Intel NUC D54250WYK mini-pc;
- On the Intel NUC, the operating system is Ubuntu 14.04, and the ROS distribution is Indigo.
3.6. Obstacle Detection Mechanism
- ROS driver for the Sick Tim 561 2D laser scanner. The parameters were set according to the official configuration, which can be found at https://cdn.sick.com/media/pdf/6/46/446/dataSheet_TiM561-2050101_1071419_en.pdf (accessed on 10 August 2022).
4. The Adapted Bézier Curves Algorithm
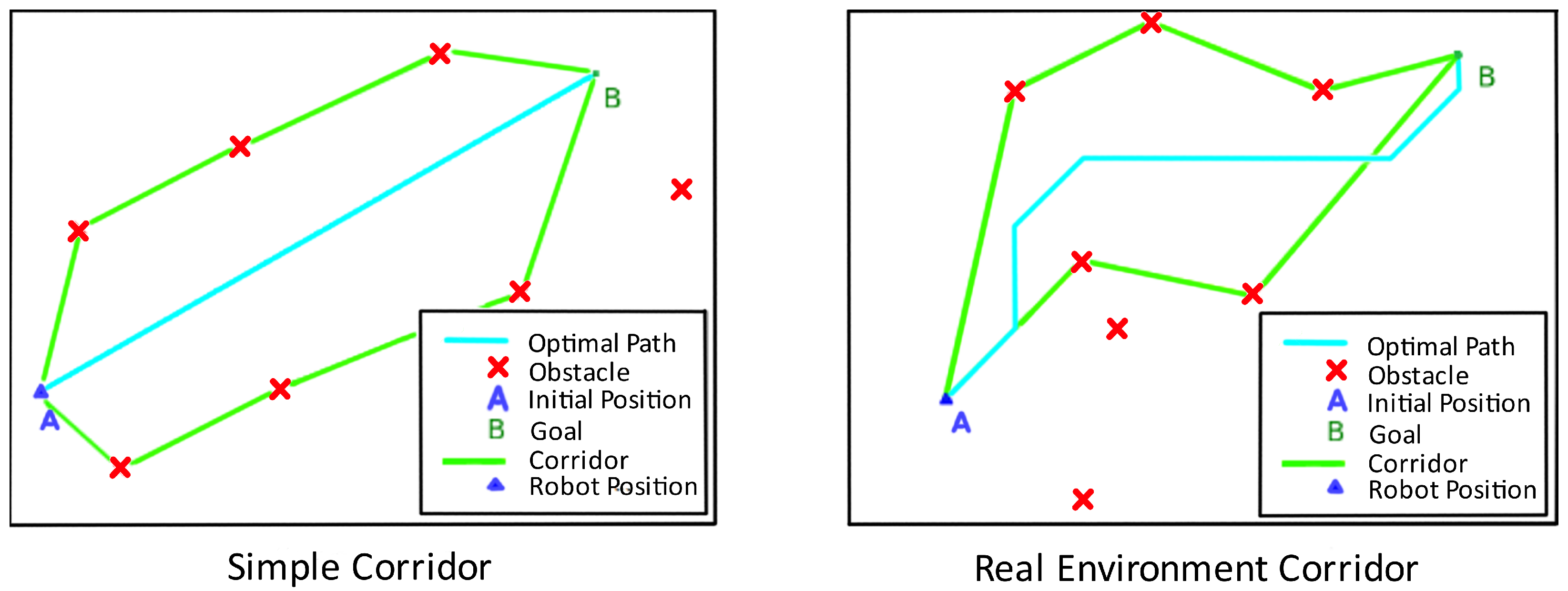
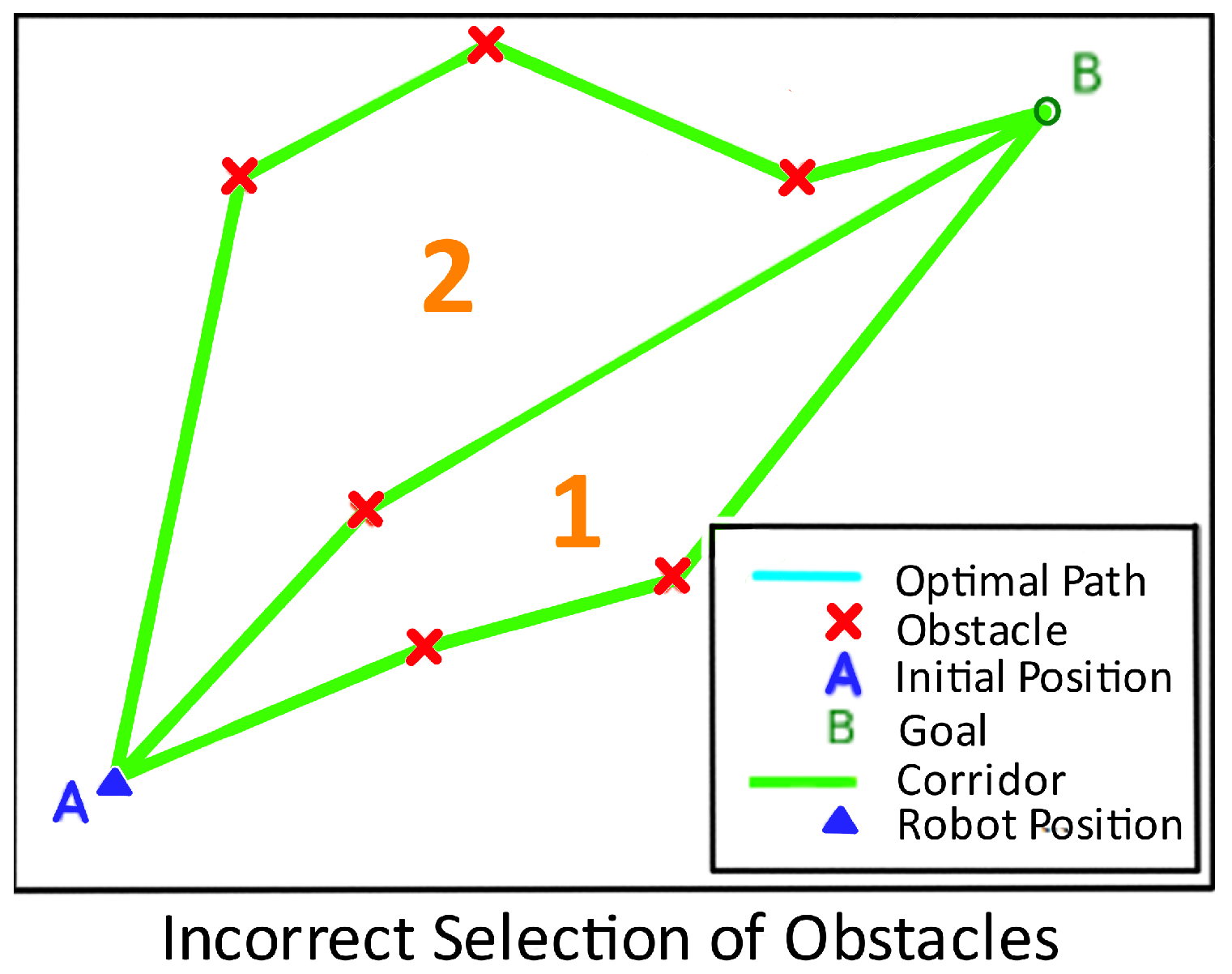
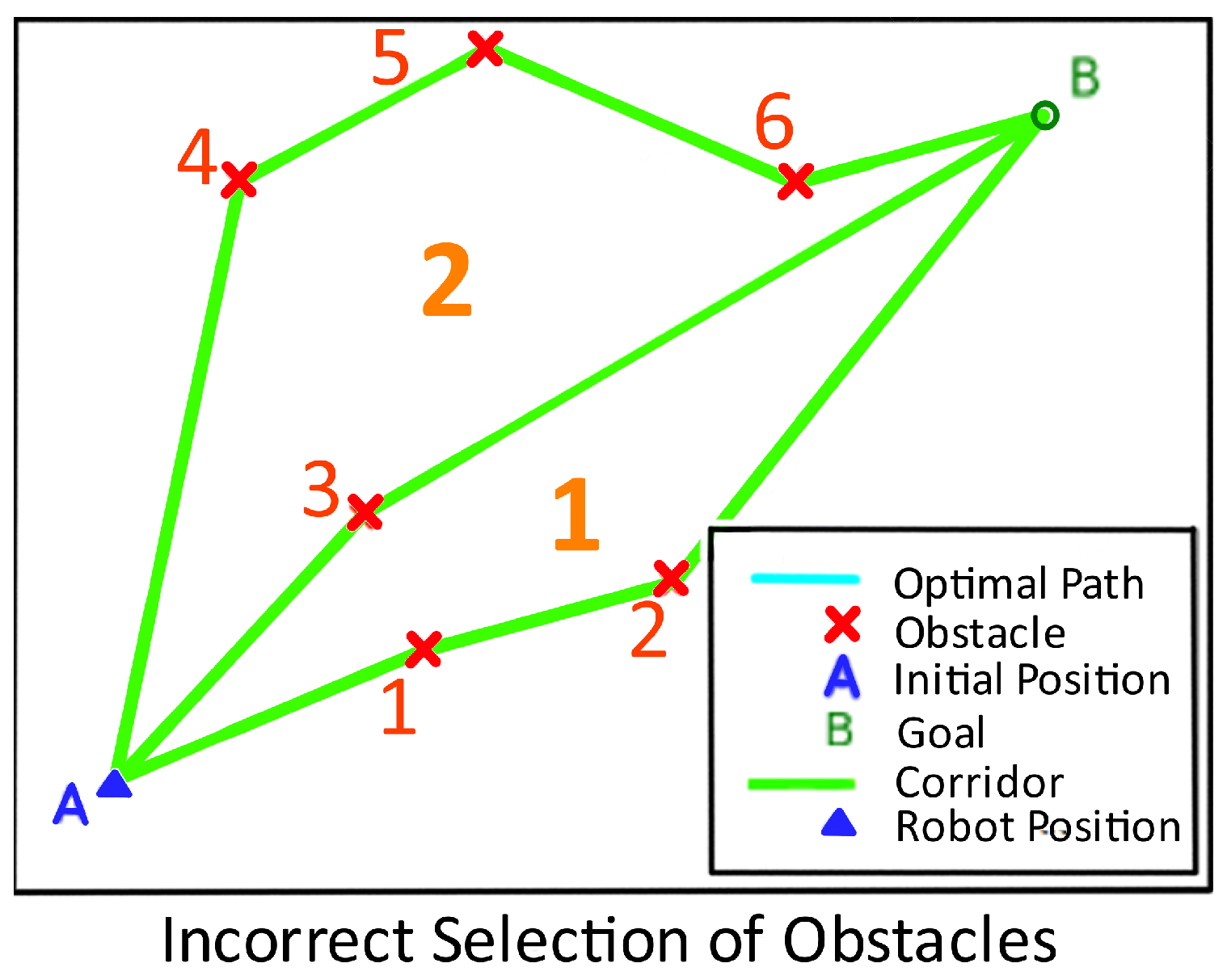
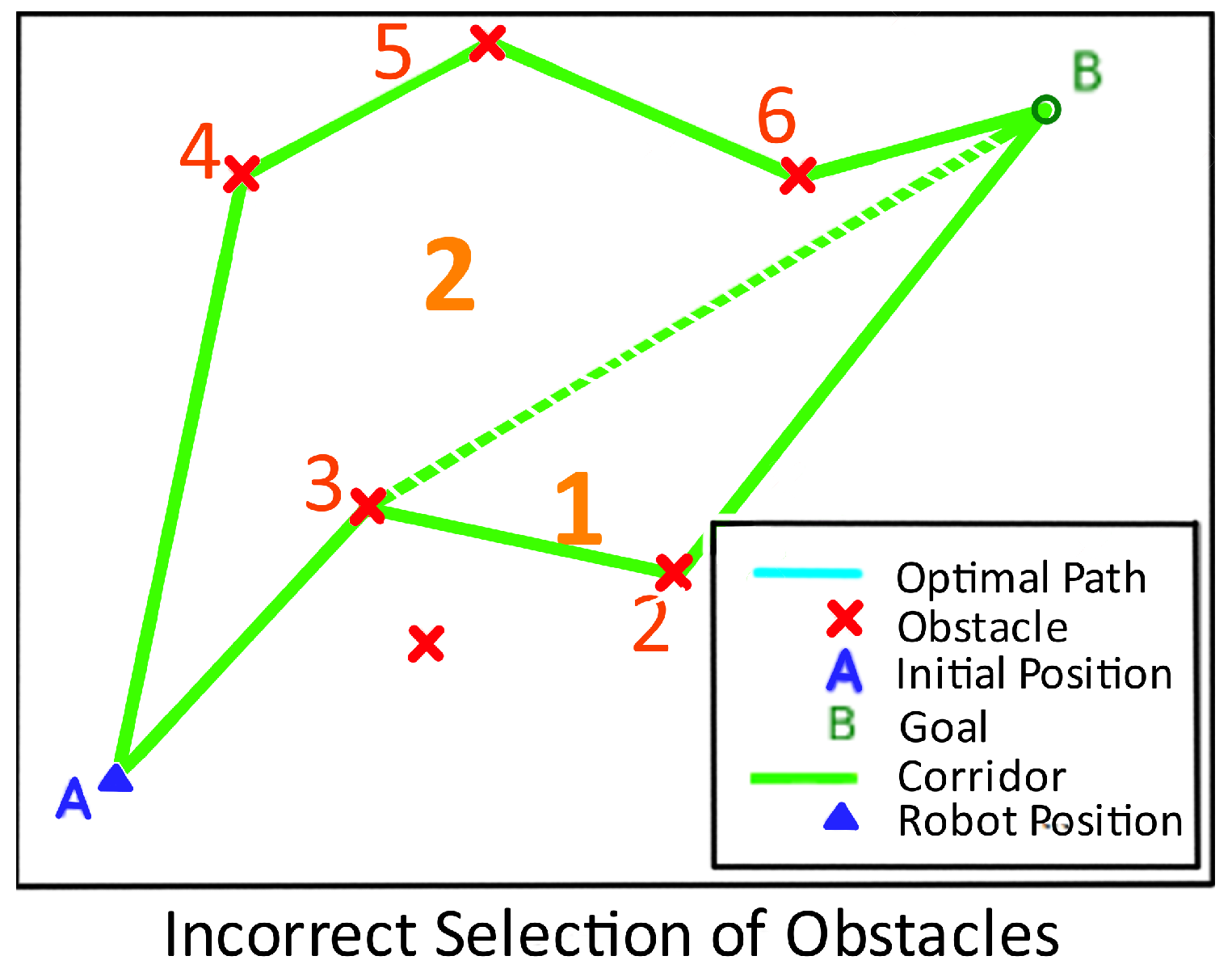
- The algorithm will consider only the obstacles whose distance to the optimal path at any time is lower than 2 m.
- The obstacles closest to the robot’s current position are selected only if their direction vector intersects the robot’s direction vector. In other words, when the closest points pose no collision risk, it is considered that the robot has already surpassed them.
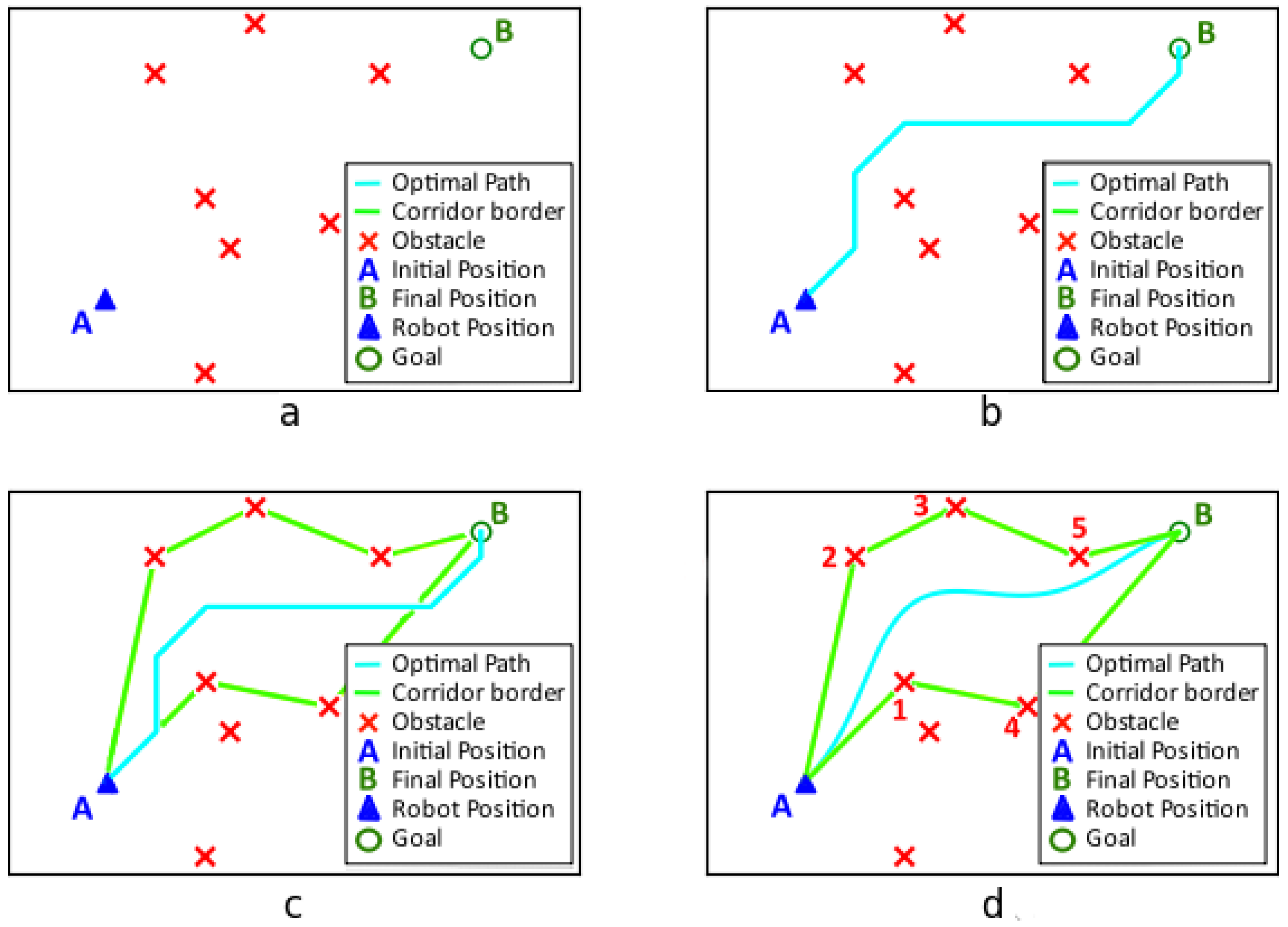
- The algorithm uses a grid-based algorithm such as D* to compute a path of optimal distance (Figure 7b);
- For the chosen path, the algorithm selects a set of obstacles that are the closest to the optimal path and represent the boundaries for the optimal corridor, Figure 7c;
- The points are ordered by the time when the robot will reach the closest position to each one of the points, as can be seen in Figure 7d;
- The algorithm generates a Bézier curve. This curve represents the planned path, as is shown in Figure 7d.
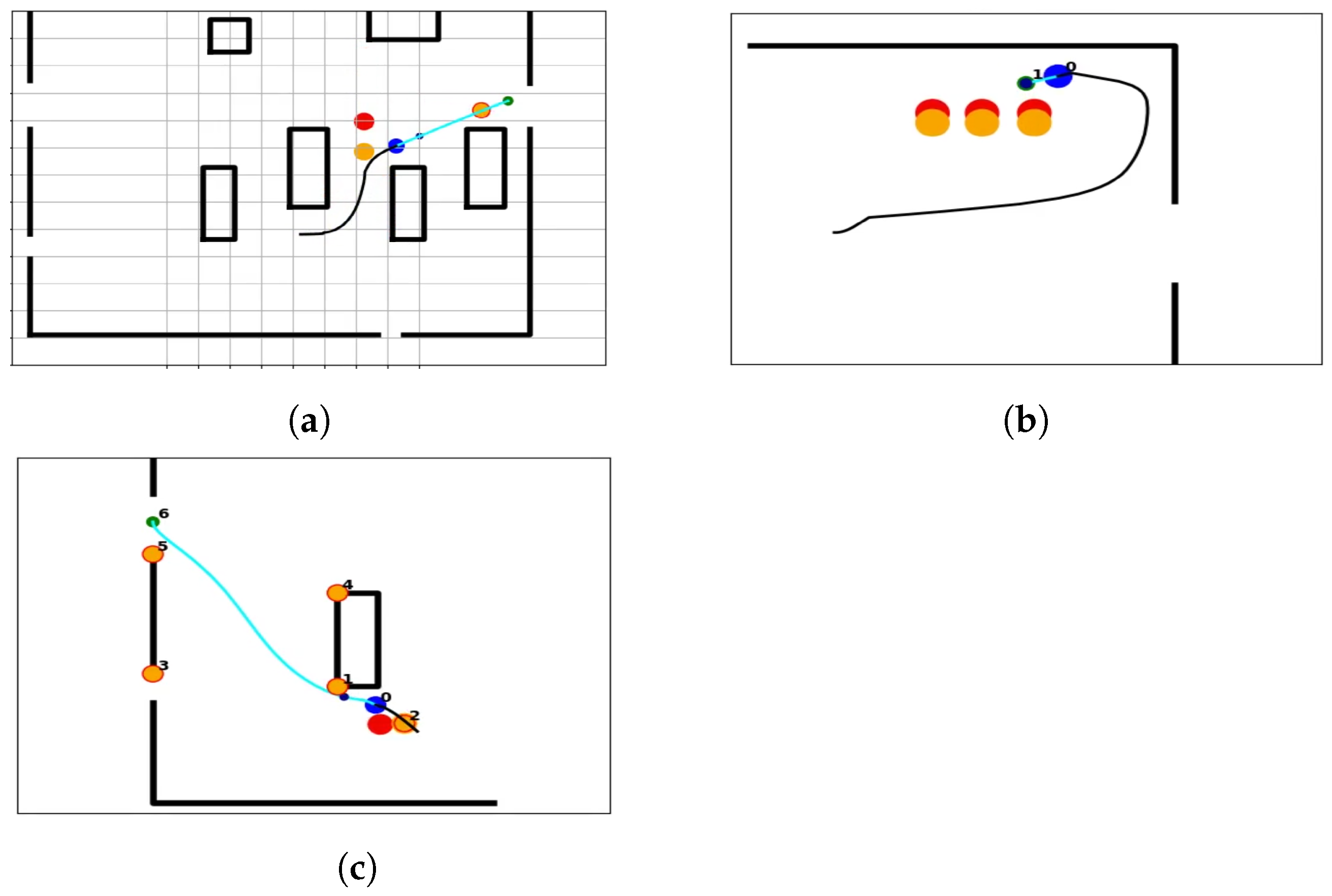
5. Improved Bézier Curve Model for Collision Avoidance
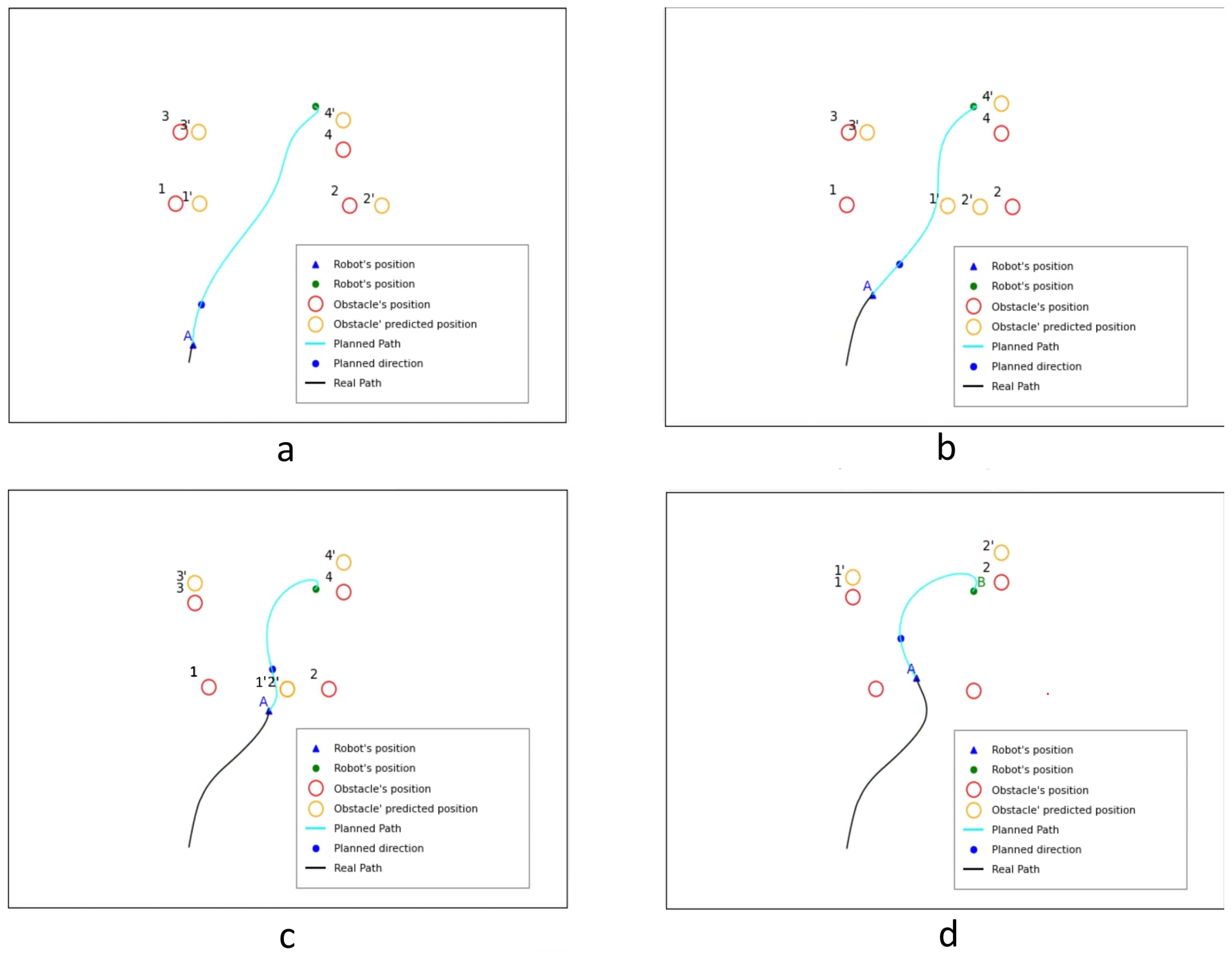
- Instead of using the obstacles’ current position, the algorithm predicts the obstacles’ position as waypoints by delaying the position by two seconds.
- A new way of path planning when the distance to the closest two obstacles is critical.
The Collision Prevention of the Improved Bézier Curve Model
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
- The classical algorithm: https://github.com/rst-tu-dortmund/teb_local_planner (accessed on 1 September 2022).
- The stages without a robot: https://drive.google.com/drive/u/0/folders/16sY46mjjswDUVzS8Xt-7Pr3hElJSlfIk (accessed on 1 September 2022).
- The stages tested in this paper: https://drive.google.com/drive/u/0/folders/1XE8OpbbFfL7j0KhhXgSR6pqVhmCN2Lf8 (accessed on 1 September 2022).
- The collisions detected when using the classical TEB planner: https://drive.google.com/drive/u/0/folders/1NK8drqK1aaMV881W1BEZRXO6OK59YziL (accessed on 1 September 2022). In the folder above, you can browse all the detected collisions for each stage, by opening the folders named Stage 1, Stage 2, …, Stage 8.
- The simulations with the enhanced algorithm: https://drive.google.com/drive/folders/1O_m9ZilqUh2t_ZlvFIpsqP2YkpOiSsVn (accessed on 1 September 2022).
References
- Abdel-Aziz, H.; Zanaty, E.; Ali, H.A.; Saad, M.K. Generating Bézier curves for medical image reconstruction. Results Phys. 2021, 23, 103996. [Google Scholar] [CrossRef]
- Bugdol, M.; Juszczyk, J. Parametric curves in liver deformation for laparoscopic purposes. In Information Technologies in Biomedicine; Springer: Berlin/Heidelberg, Germany, 2010; pp. 183–190. [Google Scholar]
- Alsmadi, M. Facial recognition under expression variations. Int. Arab J. Inf. Technol. 2016, 13, 133–141. [Google Scholar]
- Cinque, L.; Levialdi, S.; Malizia, A. Shape description using cubic polynomial Bezier curves. Pattern Recognit. Lett. 1998, 19, 821–828. [Google Scholar] [CrossRef]
- Sederberg, T. Computer Aided Geometric Design; CAGD Course Notes; Brigham Young University Press: Provo, UH, USA, 2012. [Google Scholar]
- Li, H.; Luo, Y.; Wu, J. Collision-free path planning for intelligent vehicles based on Bézier curve. IEEE Access 2019, 7, 123334–123340. [Google Scholar] [CrossRef]
- Li, H.; Luo, J.; Yan, S.; Zhu, M.; Hu, Q.; Liu, Z. Research on parking control of bus based on improved pure pursuit algorithms. In Proceedings of the 2019 18th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), Wuhan, China, 8–10 November 2019; pp. 21–26. [Google Scholar]
- Liang, Z.; Zheng, G.; Li, J. Automatic parking path optimization based on bezier curve fitting. In Proceedings of the 2012 IEEE International Conference on Automation and Logistics, Zhengzhou, China, 15–17 August 2012; pp. 583–587. [Google Scholar]
- Xu, L.; Cao, M.; Song, B. A new approach to smooth path planning of mobile robot based on quartic Bezier transition curve and improved PSO algorithm. Neurocomputing 2022, 473, 98–106. [Google Scholar] [CrossRef]
- Manyam, S.G.; Casbeer, D.W.; Weintraub, I.E.; Taylor, C. Trajectory Optimization For Rendezvous Planning Using Quadratic Bézier Curves. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 1405–1412. [Google Scholar]
- Maqsood, S.; Abbas, M.; Miura, K.T.; Majeed, A.; Iqbal, A. Geometric modeling and applications of generalized blended trigonometric Bézier curves with shape parameters. Adv. Differ. Equ. 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- BiBi, S.; Abbas, M.; Misro, M.Y.; Hu, G. A novel approach of hybrid trigonometric Bézier curve to the modeling of symmetric revolutionary curves and symmetric rotation surfaces. IEEE Access 2019, 7, 165779–165792. [Google Scholar] [CrossRef]
- Gim, S.; Adouane, L.; Lee, S.; Derutin, J.P. Clothoids composition method for smooth path generation of car-like vehicle navigation. J. Intell. Robot. Syst. 2017, 88, 129–146. [Google Scholar] [CrossRef] [Green Version]
- Benko Loknar, M.; Blažič, S.; Klančar, G. Minimum-time velocity profile planning for planar motion considering velocity, acceleration and jerk constraints. Int. J. Control 2021, 94, 1–15. [Google Scholar] [CrossRef]
- Zdešar, A.; Škrjanc, I. Optimum velocity profile of multiple Bernstein-Bézier curves subject to constraints for mobile robots. ACM Trans. Intell. Syst. Technol. 2018, 9, 1–23. [Google Scholar] [CrossRef]
- Zhang, T.; Mo, H. Reinforcement learning for robot research: A comprehensive review and open issues. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211007305. [Google Scholar] [CrossRef]
- Klančar, G.; Seder, M. Coordinated Multi-Robotic Vehicles Navigation and Control in Shop Floor Automation. Sensors 2022, 22, 1455. [Google Scholar] [CrossRef]
- Sánchez-Ibáñez, J.R.; Pérez-del Pulgar, C.J.; García-Cerezo, A. Path Planning for Autonomous Mobile Robots: A Review. Sensors 2021, 21, 7898. [Google Scholar] [CrossRef] [PubMed]
- Klančar, G.; Seder, M.; Blažič, S.; Škrjanc, I.; Petrović, I. Drivable Path Planning Using Hybrid Search Algorithm Based on E* and Bernstein–Bézier Motion Primitives. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 4868–4882. [Google Scholar] [CrossRef]
- Casselman, B. From Bézier to Bernstein. In Feature Column from American Mathematical Society; AMS: Providence, RI, USA, 2008. [Google Scholar]
- Bézier, P.E. Example of an existing system in the motor industry: The Unisurf system. Proc. R. Soc. Lond. Math. Phys. Sci. 1971, 321, 207–218. [Google Scholar]
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419839596. [Google Scholar] [CrossRef] [Green Version]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A review of motion planning techniques for automated vehicles. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1135–1145. [Google Scholar] [CrossRef]
- Connors, J.; Elkaim, G. Manipulating B-Spline based paths for obstacle avoidance in autonomous ground vehicles. In Proceedings of the 2007 National Technical Meeting of The Institute of Navigation, Cambridge, MA, USA, 23–25 April 2007; pp. 1081–1088. [Google Scholar]
- Vickers, N.J. Animal communication: When i’m calling you, will you answer too? Curr. Biol. 2017, 27, R713–R715. [Google Scholar] [CrossRef]
- Raheem, F.A.; Abdulkareem, M.I. Development of a* algorithm for robot path planning based on modified probabilistic roadmap and artificial potential field. J. Eng. Sci. Technol. 2020, 15, 3034–3054. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Raheem, F.A.; Hameed, U.I. Path planning algorithm using D* heuristic method based on PSO in dynamic environment. Am. Acad. Sci. Res. J. Eng. Technol. Sci. 2018, 49, 257–271. [Google Scholar]
- Lee, C.Y. An algorithm for path connections and its applications. IRE Trans. Electron. Comput. 1961, 3, 346–365. [Google Scholar] [CrossRef] [Green Version]
- Blažič, S.; Klančar, G. Effective Parametrization of Low Order Bézier Motion Primitives for Continuous-Curvature Path-Planning Applications. Electronics 2022, 11, 1709. [Google Scholar] [CrossRef]
- Duraklı, Z.; Nabiyev, V. A new approach based on Bezier curves to solve path planning problems for mobile robots. J. Comput. Sci. 2022, 58, 101540. [Google Scholar] [CrossRef]
- Li, F.F.; Du, Y.; Jia, K.J. Path planning and smoothing of mobile robot based on improved artificial fish swarm algorithm. Sci. Rep. 2022, 12, 659. [Google Scholar] [CrossRef]
- Song, B.; Wang, Z.; Zou, L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Tharwat, A.; Elhoseny, M.; Hassanien, A.E.; Gabel, T.; Kumar, A. Intelligent Bézier curve-based path planning model using Chaotic Particle Swarm Optimization algorithm. Clust. Comput. 2019, 22, 4745–4766. [Google Scholar] [CrossRef]
- Rösmann, C.; Feiten, W.; Wösch, T.; Hoffmann, F.; Bertram, T. Efficient trajectory optimization using a sparse model. In Proceedings of the 2013 European Conference on Mobile Robots, Barcelona, Spain, 25–27 September 2013; pp. 138–143. [Google Scholar]
- Rösmann, C.; Hoffmann, F.; Bertram, T. Kinodynamic trajectory optimization and control for car-like robots. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5681–5686. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- Quinlan, S.; Khatib, O. Elastic bands: Connecting path planning and control. In Proceedings of the 1993 IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; pp. 802–807. [Google Scholar]
- Wu, J.; Ma, X.; Peng, T.; Wang, H. An Improved Timed Elastic Band (TEB) Algorithm of Autonomous Ground Vehicle (AGV) in Complex Environment. Sensors 2021, 21, 8312. [Google Scholar] [CrossRef]
- Chen, W.; Liu, J.; Tang, Y.; Ge, H. Automatic Spray Trajectory Optimization on Bézier Surface. Electronics 2019, 8, 168. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Wang, M.; Ruan, X.; Chen, L.; Ji, T.; Liu, X. Adaptive Motion Skill Learning of Quadruped Robot on Slopes Based on Augmented Random Search Algorithm. Electronics 2022, 11, 842. [Google Scholar] [CrossRef]
- Choi, J.W.; Curry, R.; Elkaim, G. Path planning based on bézier curve for autonomous ground vehicles. In Proceedings of the Advances in Electrical and Electronics Engineering-IAENG Special Edition of the World Congress on Engineering and Computer Science 2008, Sozopol, Bulgaria, 11–14 September 2008; pp. 158–166. [Google Scholar]
- Preparata, F.P.; Shamos, M.I. Computational Geometry: An Introduction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Sokolov, M.; Gabdullin, A.; Afanasyev, I.; Lavrenov, R.; Magid, E. 3D modelling and simulation of a crawler robot in ROS/Gazebo. In Proceedings of the 4th International Conference on Control, Mechatronics and Automation, Barcelona, Spain, 7–11 December 2016; pp. 61–65. [Google Scholar] [CrossRef]
- Mengacci, R.; Zambella, G.; Grioli, G.; Caporale, D.; Catalano, M.G.; Bicchi, A. An Open-Source ROS-Gazebo Toolbox for Simulating Robots With Compliant Actuators. Front. Robot. AI 2021, 246. [Google Scholar] [CrossRef] [PubMed]
- Gelperin, D. On the optimality of A*. Artif. Intell. 1977, 8, 69–76. [Google Scholar] [CrossRef]
- Lu, D.V.; Hershberger, D.; Smart, W.D. Layered costmaps for context-sensitive navigation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 709–715. [Google Scholar]
- Thrun, S. Simultaneous Localization and Mapping. In Robotics and Cognitive Approaches to Spatial Mapping; Jefferies, M.E., Yeap, W.K., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 13–41. [Google Scholar] [CrossRef]
- Kohlbrecher, S.; Von Stryk, O.; Meyer, J.; Klingauf, U. A flexible and scalable SLAM system with full 3D motion estimation. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 155–160. [Google Scholar]
- Overmars, M.; Karamouzas, I.; Geraerts, R. Flexible path planning using corridor maps. In Proceedings of the European Symposium on Algorithms, Karlsruhe, Germany, 15–17 September 2008; pp. 1–12. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | |
|---|---|---|---|---|---|---|---|
| P | 1 | 9 | 3 | 9 | 3 | 9 | 3 |
| P | 9 | 3 | 3 | 9 | 9 | 3 | 9 |
| P | 1 | 9 | 9 | 3 | 0 | 9 | 9 |
| The 1st Stage | At the library, a person inspects the shelves, stops, chooses a book, moves to the book registration area, and leaves the room. |
| The 2nd Stage | Director’s room. A syrup bottle fell and broke in the middle of the room. Two robots are wet vacuuming, two robots are dry vacuuming, and a robot cleans the hard-to-reach areas of the room. |
| The 3rd Stage | Ten children develop various skills in a room specially set up for them. They run, tell stories in a group, and play various games. |
| The 4th Stage | Fifteen robots carry documents and perform various other tasks. The difficulty of this route consists of the large number of robots and their variable paths. Some of the robots stop because they have completed their tasks while others continue to work. |
| The 5th Stage | At the conference room, obstacles are represented by a person talking on the phone, a group of three people who talk during the break and then return to their seats, and three speakers. The people that do not leave the seats represent the fixed obstacles while the other people are mobile obstacles. |
| The 6th Stage | Ten cleaning robots are performing various tasks in a room currently under renovation. They all follow different paths over different distances. |
| The 7th Stage | The day before vacation. The gym will be closed in ten minutes, and there will be only five children. Two are taking the running test. Furthermore, the other three are doing group exercises. |
| The 8th Stage | The robot replenishes the stocks of perfumes for the four tables. In order to fulfill the objective of having all eight types of obstacles in the same sequence, the robot starts its activity in the space between the perfume shelves, after which it will move to each table separately. |
| The 9th Stage | This stage represents an employee located in a supermarket. Its task is to collect the money from each cash register and deposit it in the special box. |
| The 10th Stage | A robot cleans a classroom after the pupils leave the class empty. The robot inspects the entire room. |
| The 11th Stage | A difficult variant of the Third Stage was improved by increasing the number of mobile obstacles. In this case, fifteen students are present in the room. They perform various activities (e.g., tell stories, play, argue and reconcile, dance, run). |
| The 12th Stage | An automatic product packaging shop. The robots take the gift from the conveyor belt, and other robots take the gifts according to their size and take them to other packing places. Moreover, the shop has robots that deal with the delimitation of the area to avoid the injury of trespassers. Moreover, this place contains robots that inspect the gifts. People take their gifts using the windows that are present along the desks. |
| The 13th Stage | Ten students are in the reading room. People read, choose books from the shelves, and talk with the librarian and her assistant. A group of four students just entered the room, but because they did not find seats, they chose to leave. An energetic teacher enters, asks questions, and leaves the room. |
| The 14th Stage | An enhanced version of the Fourth Stage, which contains extra obstacles. The cleaning robots preparing the conference room for the upcoming visit of the general manager. The unexpected visit had just been announced, and the employees celebrated their colleague’s birthday. To avoid an unpleasant situation, the company’s staff chose to clean the room as quickly as possible so they brought in several extra robots to clean the area on time. |
| The 15th Stage | It is the first day of school. A robot comes to check if the room has been properly sanitized before the day starts. |
| The 16th Stage | They are mobile robots. These mobile obstacles reach speeds that are higher than any robot’s speed from the previous stages. |
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | S11 | S12 | S13 | S14 | S15 | S16 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C1 | 9 | 1 | 3 | 0 | 1 | 1 | 1 | 3 | 3 | 1 | 3 | 9 | 9 | 0 | 1 | 3 |
| C2 | 1 | 1 | 9 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 3 | 3 | 3 | 1 | 1 | 9 |
| C3 | 9 | 3 | 3 | 3 | 3 | 9 | 1 | 1 | 3 | 1 | 9 | 9 | 3 | 3 | 1 | 9 |
| C4 | 3 | 1 | 3 | 9 | 3 | 3 | 1 | 1 | 3 | 1 | 3 | 9 | 3 | 9 | 1 | 9 |
| C5 | 3 | 0 | 1 | 1 | 1 | 1 | 0 | 3 | 3 | 3 | 1 | 3 | 9 | 0 | 1 | 1 |
| C6 | 1 | 3 | 3 | 9 | 3 | 3 | 1 | 1 | 3 | 1 | 9 | 9 | 3 | 9 | 1 | 3 |
| C7 | 1 | 3 | 3 | 9 | 3 | 9 | 1 | 1 | 3 | 1 | 9 | 9 | 3 | 9 | 1 | 9 |
| S1 | S3 | S4 | S6 | S11 | S12 | S13 | S14 | S16 | |
|---|---|---|---|---|---|---|---|---|---|
| C1 | 9 | 3 | 0 | 1 | 3 | 9 | 9 | 0 | 3 |
| C2 | 1 | 9 | 1 | 1 | 3 | 3 | 3 | 1 | 9 |
| C3 | 9 | 3 | 3 | 9 | 9 | 9 | 3 | 3 | 9 |
| C4 | 3 | 3 | 9 | 3 | 3 | 9 | 3 | 9 | 9 |
| C5 | 3 | 1 | 1 | 1 | 1 | 3 | 9 | 0 | 1 |
| C6 | 1 | 3 | 9 | 3 | 9 | 9 | 3 | 9 | 3 |
| C7 | 1 | 3 | 9 | 9 | 9 | 9 | 3 | 9 | 9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Șomîtcă, I.-A.; Brad, S.; Florian, V.; Deaconu, Ș.-E. Improving Path Accuracy of Mobile Robots in Uncertain Environments by Adapted Bézier Curves. Electronics 2022, 11, 3568. https://doi.org/10.3390/electronics11213568
Șomîtcă I-A, Brad S, Florian V, Deaconu Ș-E. Improving Path Accuracy of Mobile Robots in Uncertain Environments by Adapted Bézier Curves. Electronics. 2022; 11(21):3568. https://doi.org/10.3390/electronics11213568
Chicago/Turabian StyleȘomîtcă, Ioana-Alexandra, Stelian Brad, Vlad Florian, and Ștefan-Eduard Deaconu. 2022. "Improving Path Accuracy of Mobile Robots in Uncertain Environments by Adapted Bézier Curves" Electronics 11, no. 21: 3568. https://doi.org/10.3390/electronics11213568