
An Efficient Estimation Method for Dynamic Systems in the Presence of Inaccurate Noise Statistics


Abstract
:1. Introduction
2. Problem Formulation
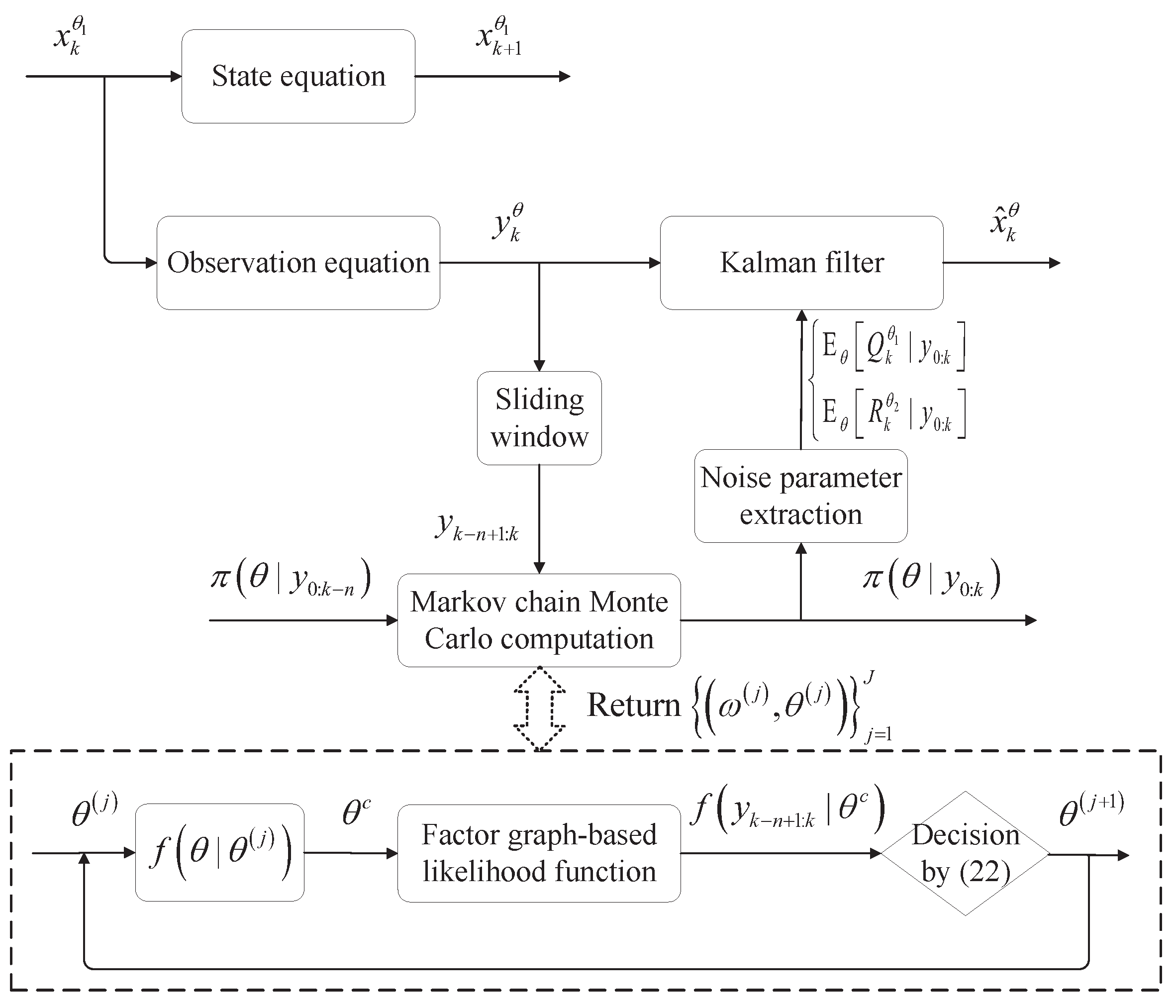
3. Improved Optimal Bayesian Kalman Filter
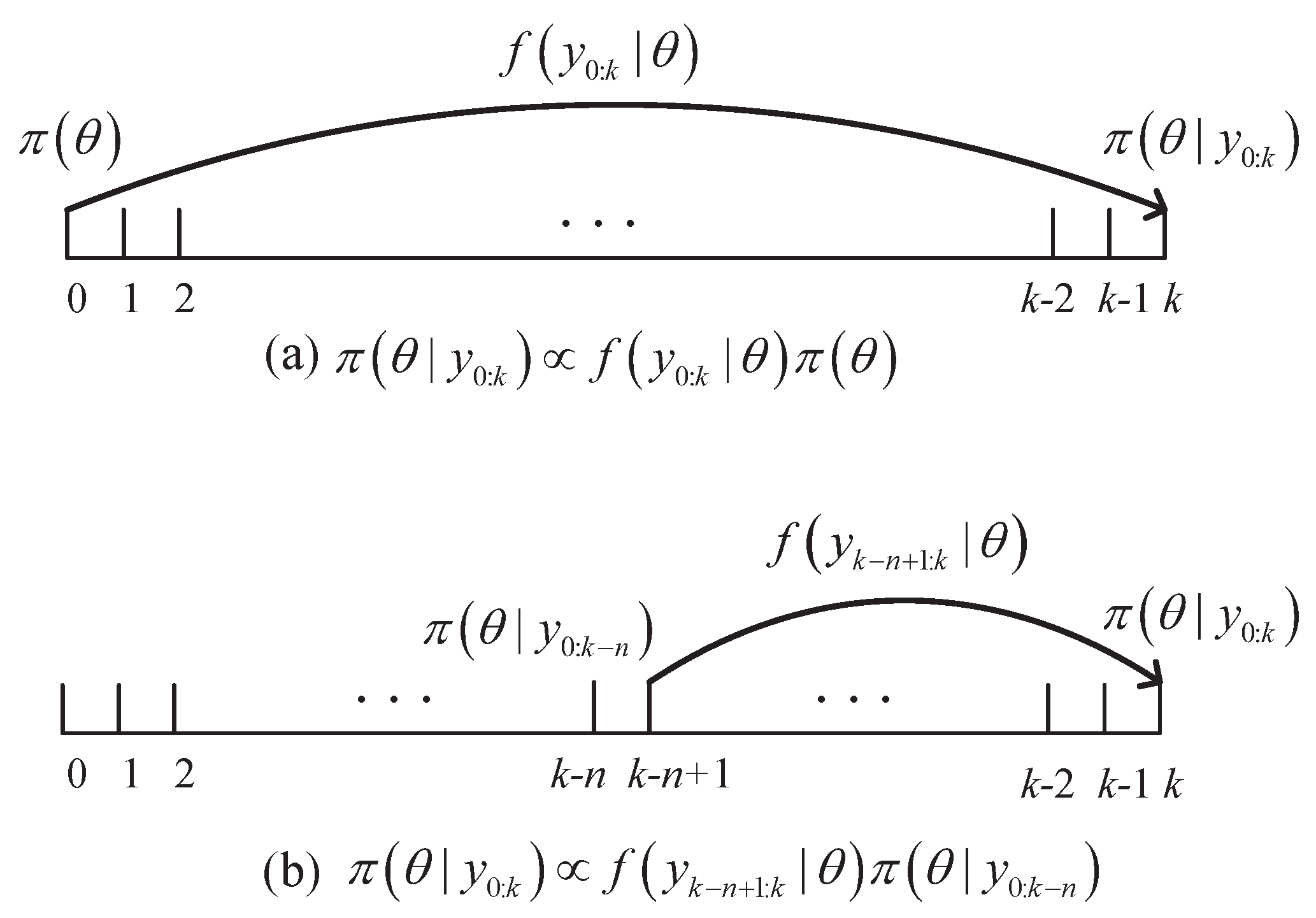
3.1. Calculation of Likelihood Function
3.2. Calculation of Posterior Effective Noise Statistics
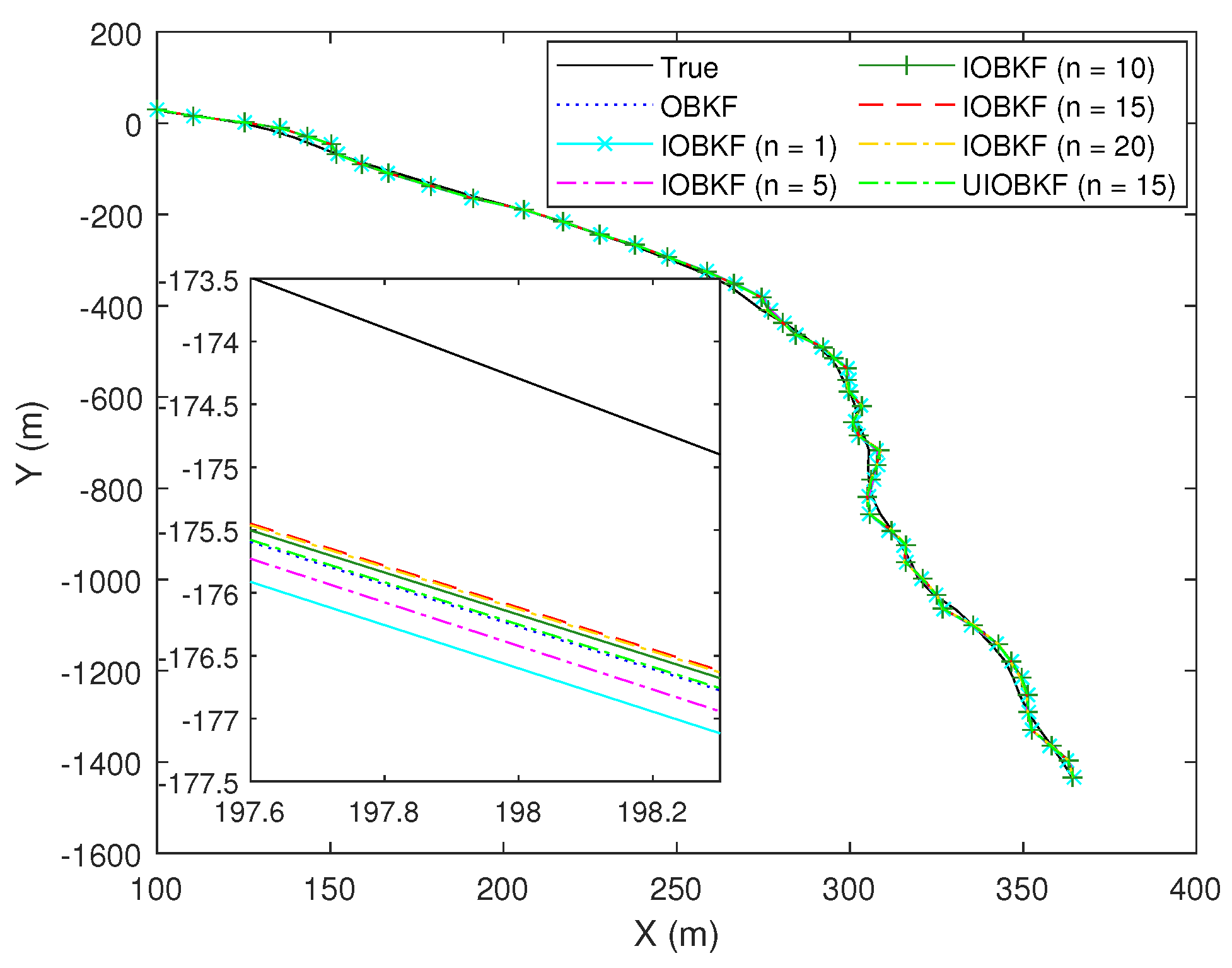
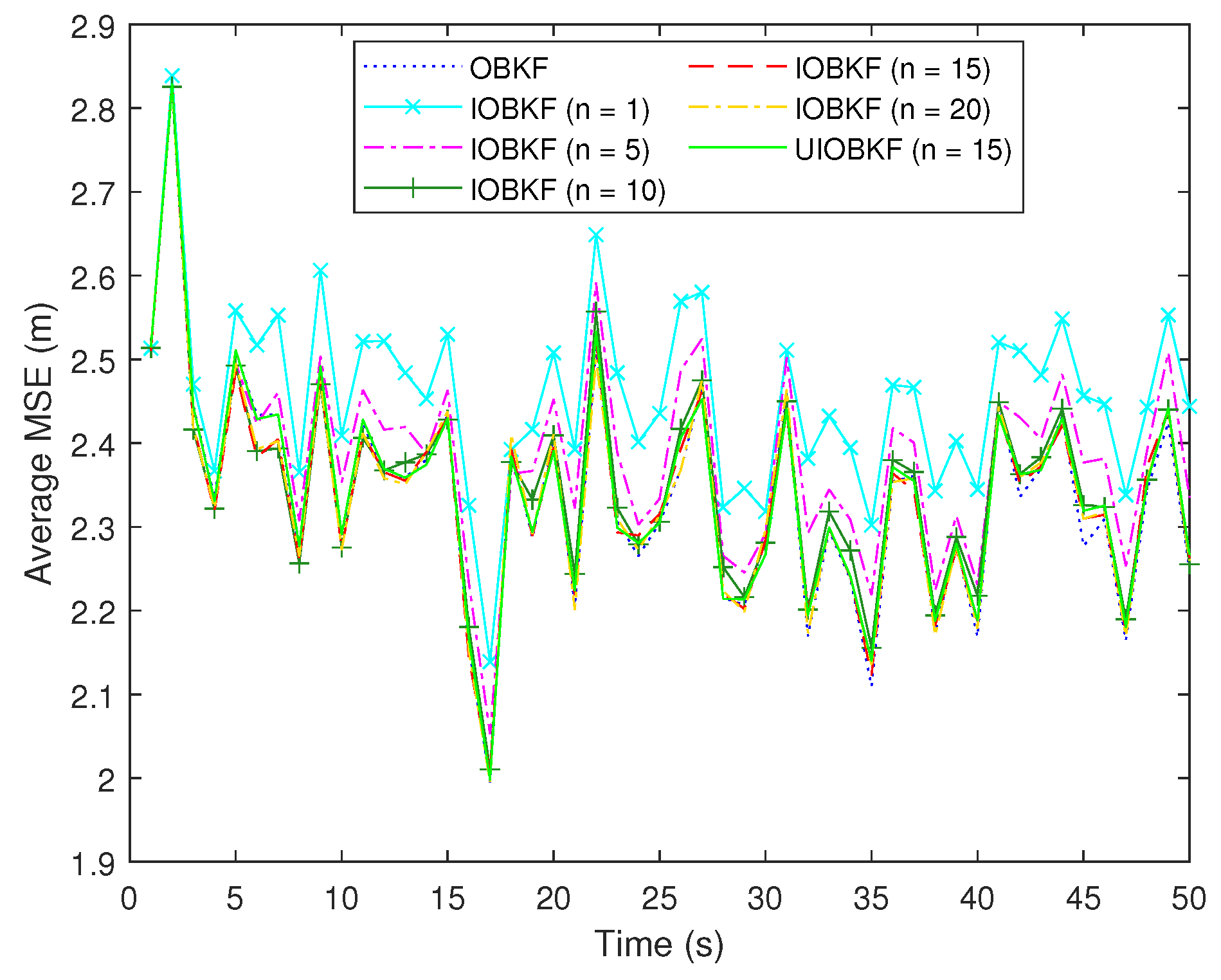
4. Numerical Simulations
4.1. Time-Invariant Noise Statistics
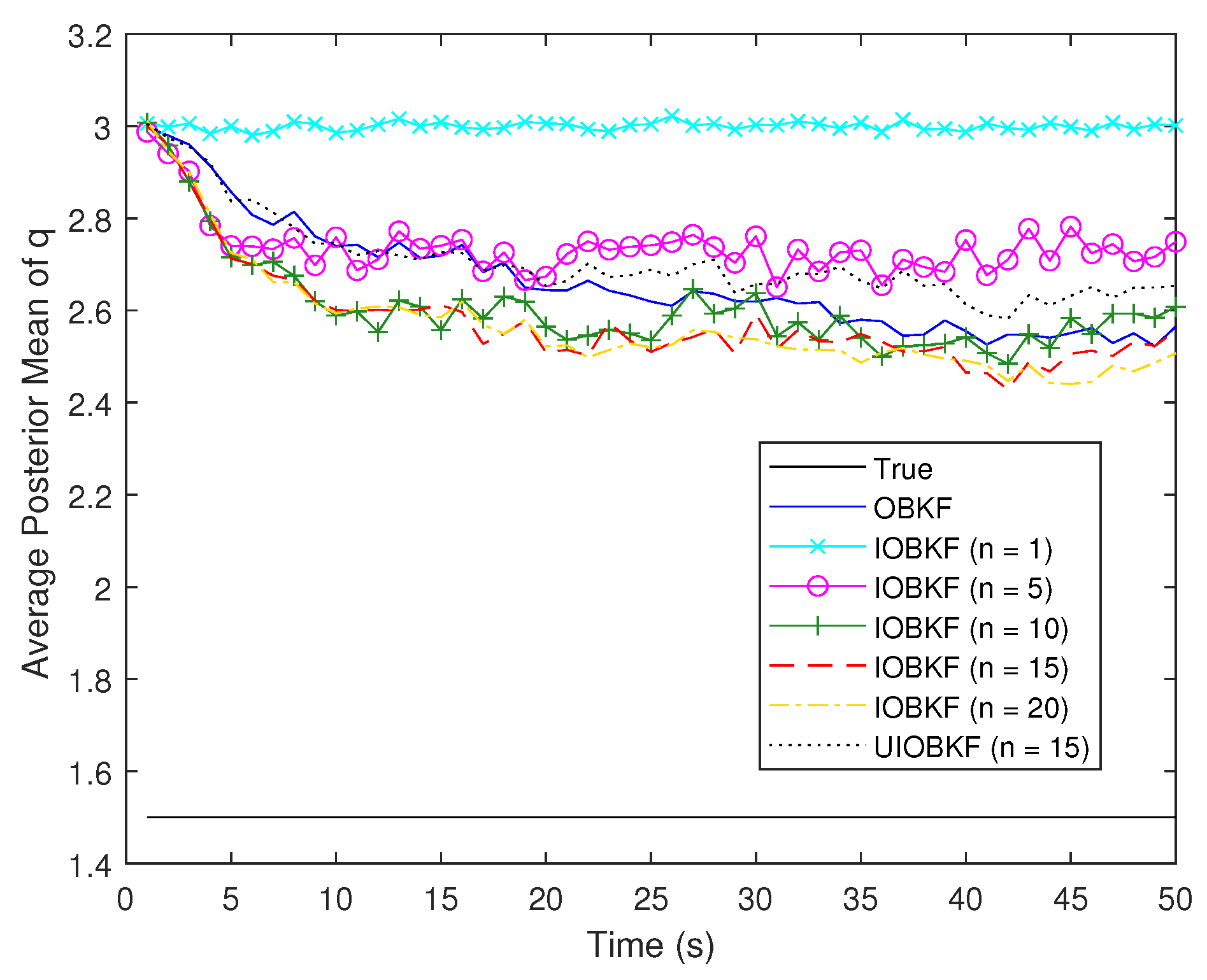
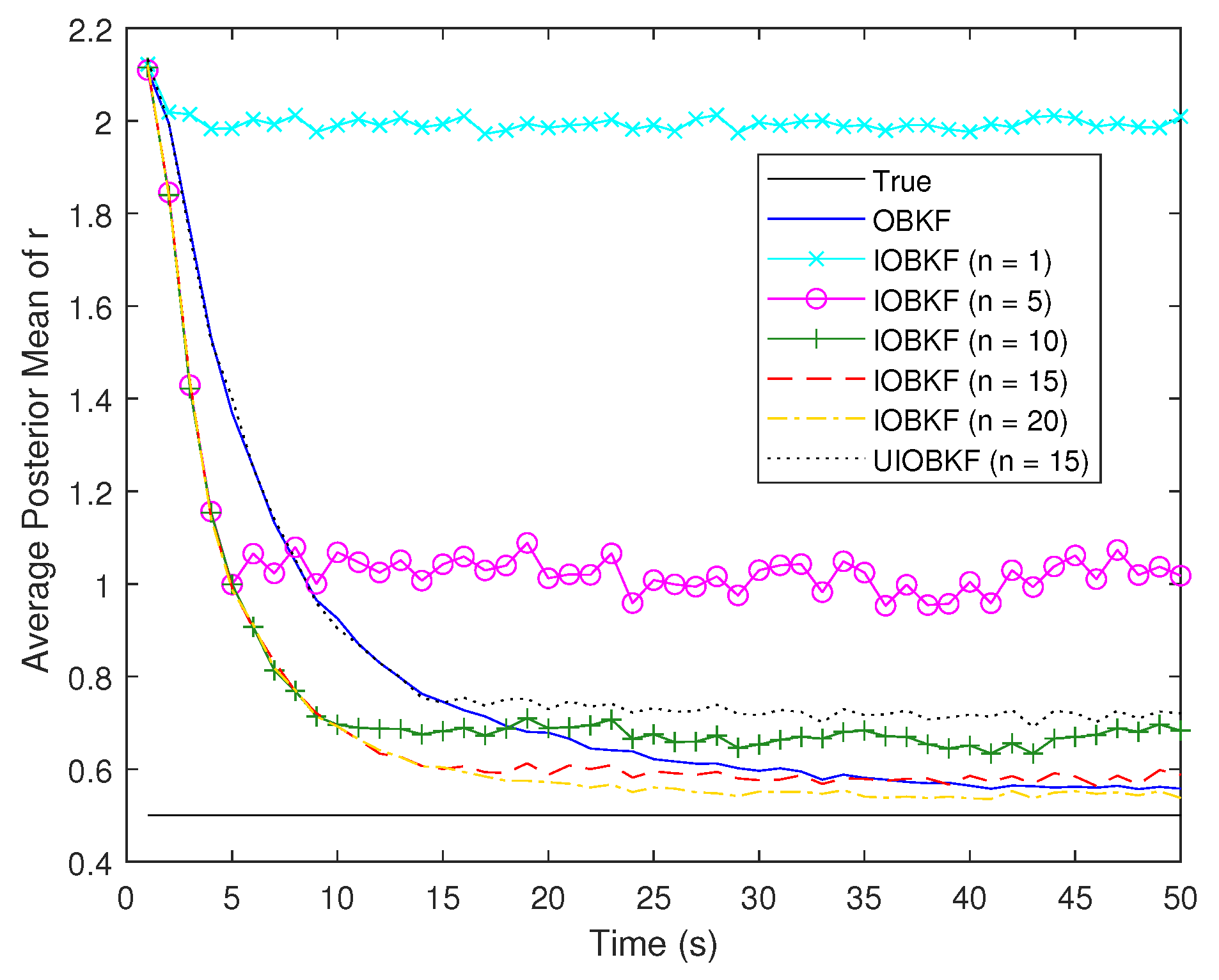
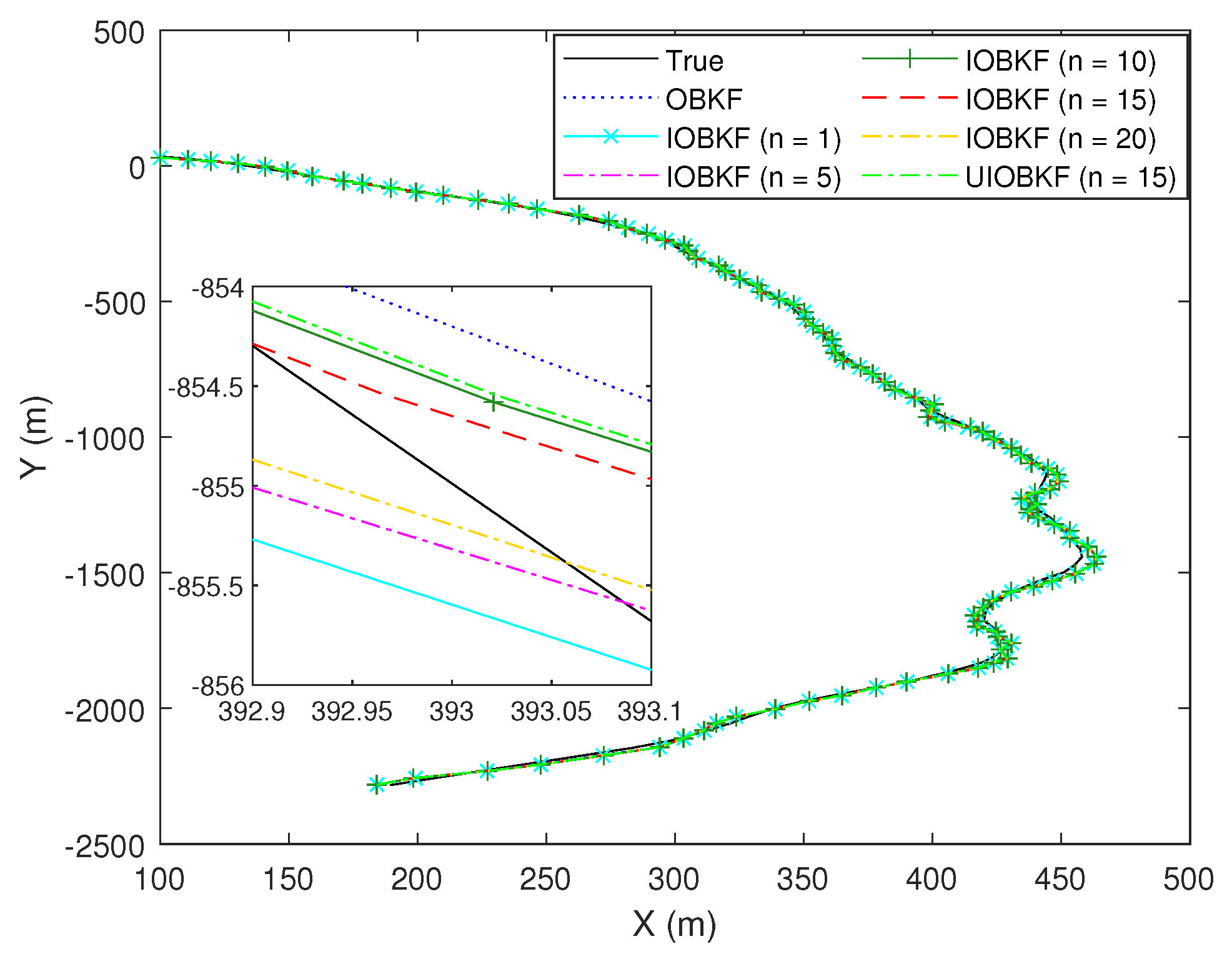
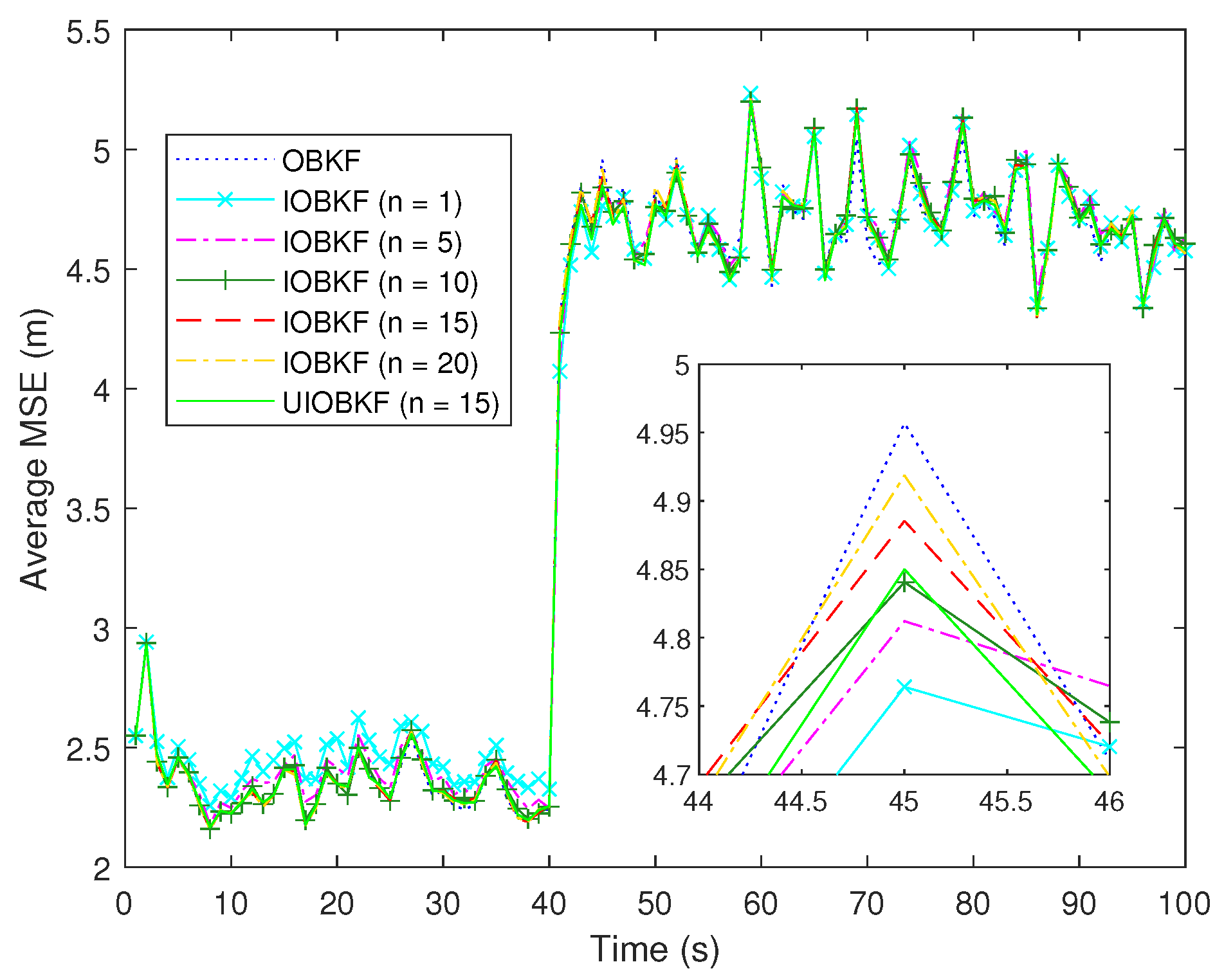
4.2. Time-Varying Noise Statistics
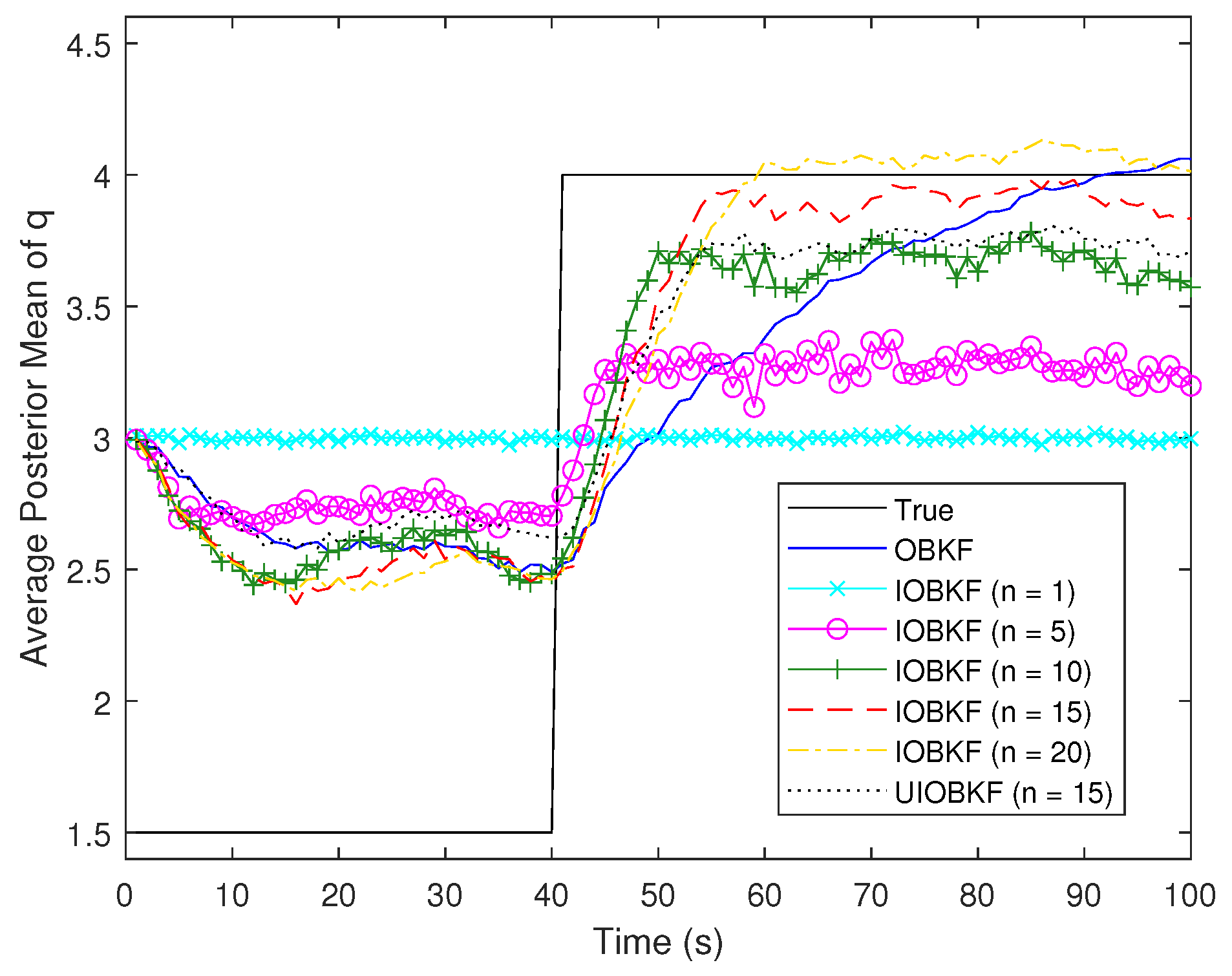
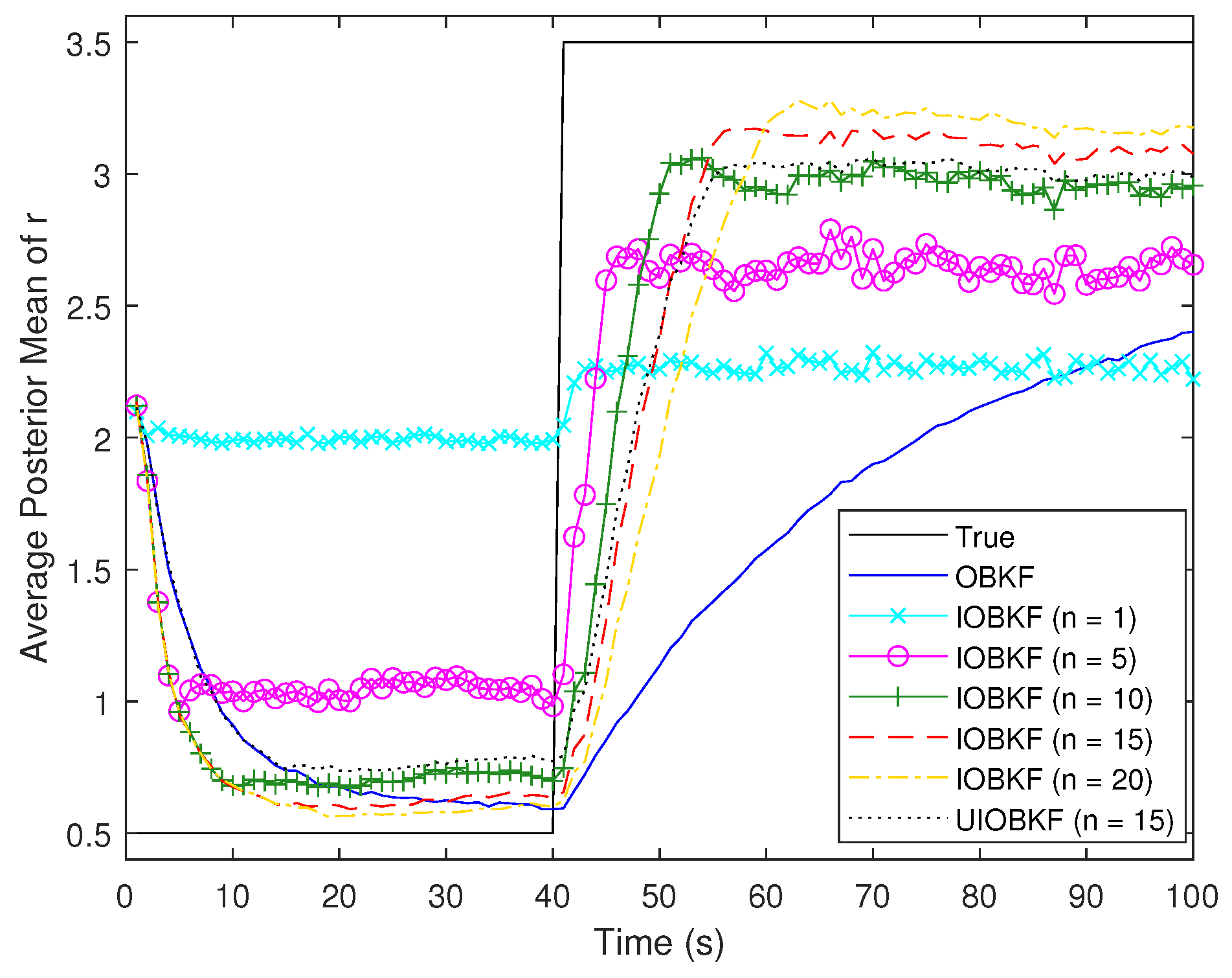
4.2.1. Both Noise Parameters q and r Jump
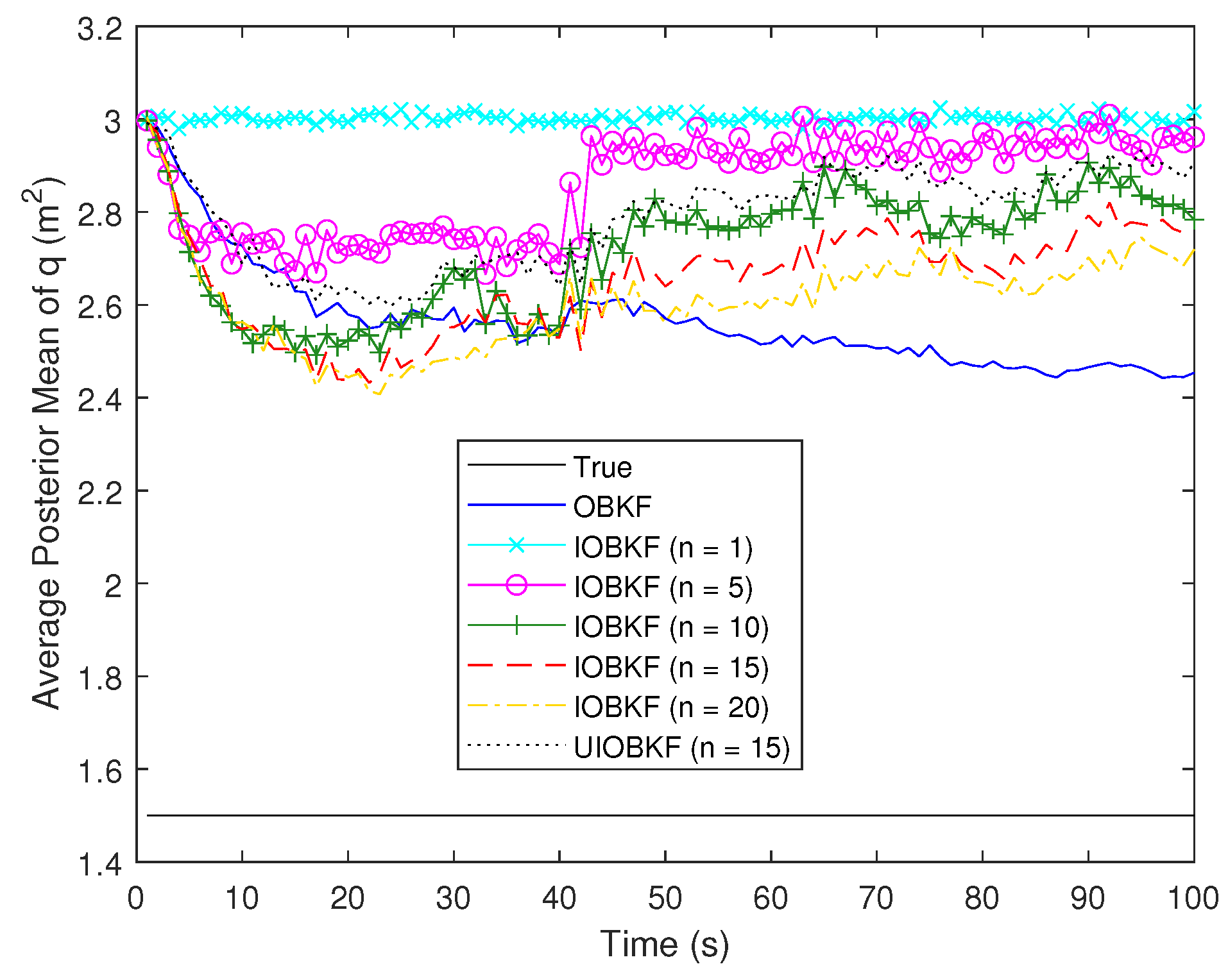
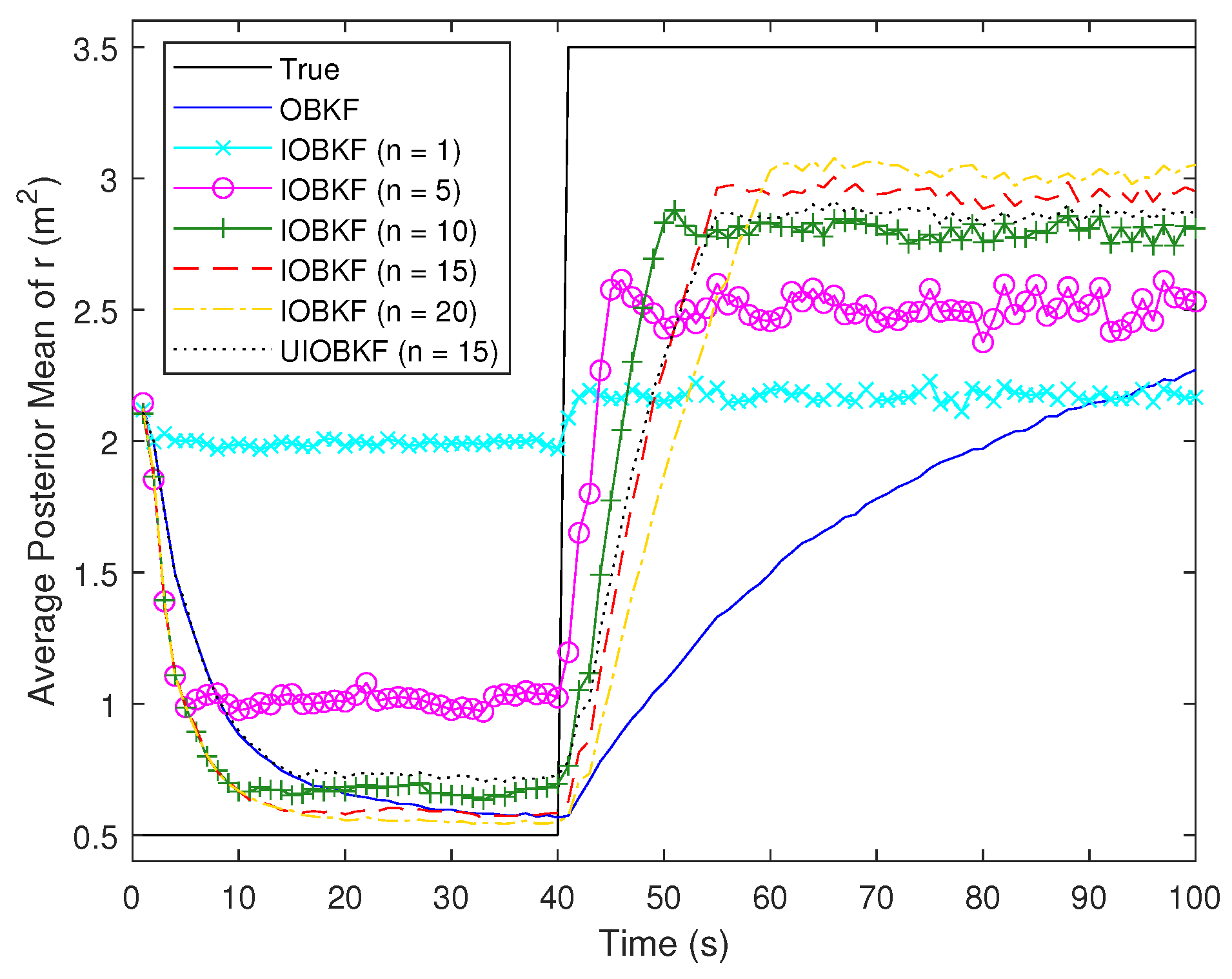
4.2.2. Noise Parameter q Is Time-Invariant and r Jumps
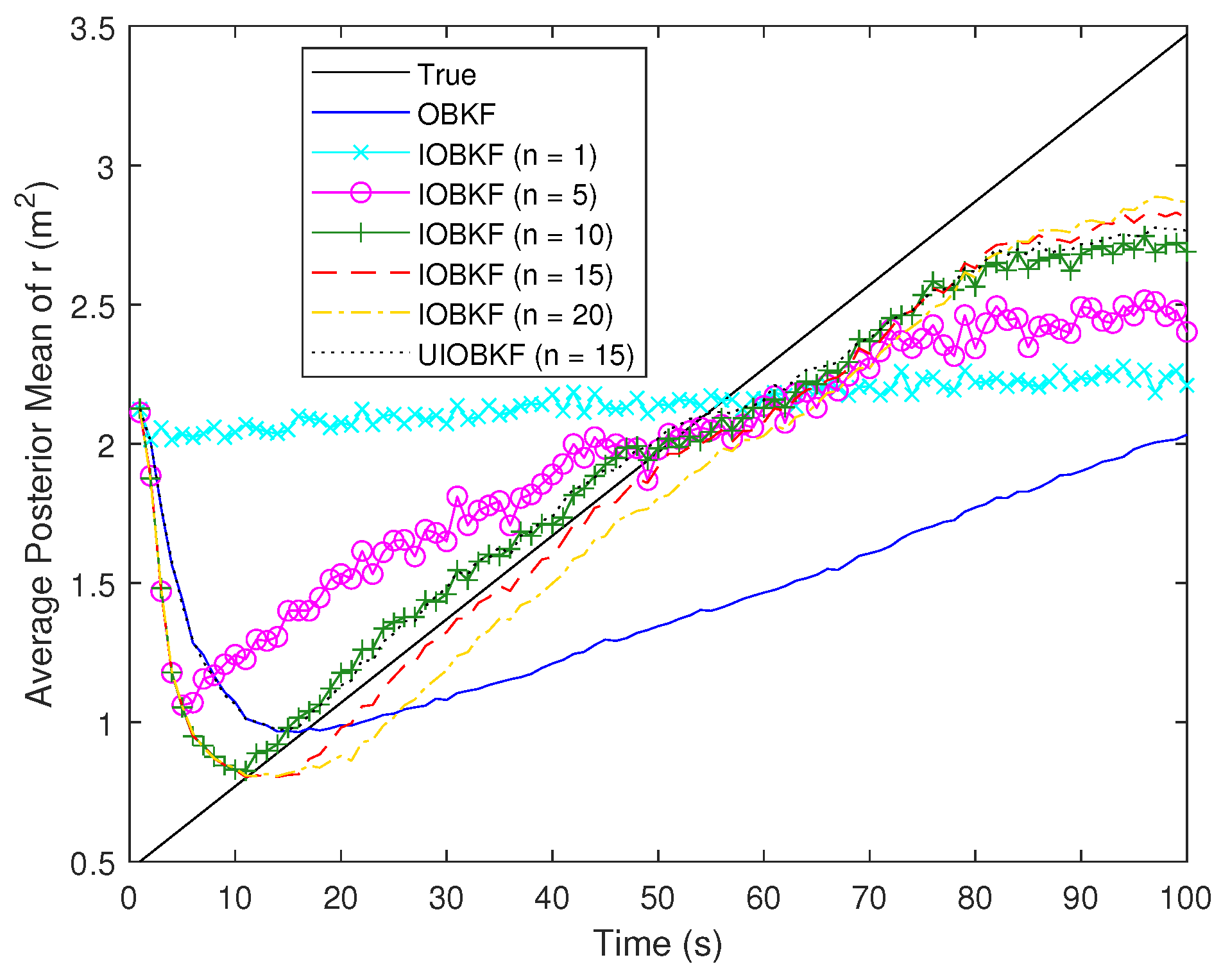
4.2.3. Noise Parameter q Is Time-Invariant and r Changes Slowly
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory, Algorthims and Software; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Chen, B.; Liu, X.; Zhao, H.; Principe, J.C. Maximum Correntropy Kalman Filter. Automatica 2017, 76, 70–77. [Google Scholar] [CrossRef] [Green Version]
- Shan, C.; Zhou, W.; Jiang, Z.; Shan, H. A New Gaussian Approximate Filter with Colored Non-Stationary Heavy-Tailed Measurement Noise. Digit. Signal Process. 2021, 122, 103358. [Google Scholar] [CrossRef]
- Zhang, G.H.; Han, C.Z.; Lian, F.; Zeng, L.H. Cardinality Balanced Multi-Target Multi-Bernoulli Filter for Pairwise Markov Model. Acta Autom. Sin. 2017, 43, 2100–2108. [Google Scholar]
- Zandavi, S.M.; Chung, V. State Estimation of Nonlinear Dynamic System Using Novel Heuristic Filter Based on Genetic Algorithm. Soft Comput. 2019, 23, 5559–5570. [Google Scholar] [CrossRef]
- Zhang, G.; Zeng, L.; Lian, F.; Liu, X.; Fu, N.; Dai, S. State Estimation for Dynamic Systems with Higher-Order Autoregressive Moving Average Non-Gaussian Noise. Front. Energy Res. 2022, 10, 990267. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; Courier Corporation: New York, NY, USA, 2012. [Google Scholar]
- Zhang, G.; Lian, F.; Han, C.; Chen, H.; Fu, N. Two Novel Sensor Control Schemes for Multi-Target Tracking via Delta Generalised Labelled Multi-Bernoulli Filtering. IET Signal Process. 2018, 12, 1131–1139. [Google Scholar] [CrossRef]
- Zhang, G.; Lan, J.; Zhang, L.; He, F.; Li, S. Filtering in Pairwise Markov Model with Student’s t Non-Stationary Noise with Application to Target Tracking. IEEE Trans. Signal Process. 2021, 69, 1627–1641. [Google Scholar] [CrossRef]
- Sarkka, S.; Nummenmaa, A. Recursive Noise Adaptive Kalman Filtering by Variational Bayesian Approximations. IEEE Trans. Autom. Contr. 2009, 54, 596–600. [Google Scholar] [CrossRef]
- Kulikova, M.V. Square-Root Algorithms for Maximum Correntropy Estimation of Linear Discrete-Time Systems in Presence of Non-Gaussian Noise. Syst. Control Lett. 2017, 108, 8–15. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Zhang, Y.; Wu, Z.; Li, N.; Chambers, J. A Novel Adaptive Kalman Filter with Inaccurate Process and Measurement Noise Covariance Matrices. IEEE Trans. Autom. Contr. 2018, 63, 594–601. [Google Scholar] [CrossRef]
- Myers, K.; Tapley, B. Adaptive Sequential Estimation with Unknown Noise Statistics. IEEE Trans. Autom. Control 1976, 21, 520–523. [Google Scholar] [CrossRef]
- Verdu, S.; Poor, H. Minimax Linear Observers and Regulators for Stochastic Systems with Uncertain Second-Order Statistics. IEEE Trans. Autom. Contr. 1984, 29, 499–511. [Google Scholar] [CrossRef]
- Dehghannasiri, R.; Esfahani, M.S.; Dougherty, E.R. Intrinsically Bayesian Robust Kalman Filter: An Innovation Process Approach. IEEE Trans. Signal Process. 2017, 65, 2531–2546. [Google Scholar] [CrossRef]
- Dehghannasiri, R.; Esfahani, M.S.; Qian, X.; Dougherty, E.R. Optimal Bayesian Kalman Filtering with Prior Update. IEEE Trans. Signal Process. 2018, 66, 1982–1996. [Google Scholar] [CrossRef]
- Loeliger, H.A. An Introduction to Factor Graphs. IEEE Signal Process. Mag. 2004, 21, 28–41. [Google Scholar] [CrossRef] [Green Version]
- Mao, Y.; Kschischang, F.R. On Factor Graphs and the Fourier Transform. IEEE Trans. Inform. Theory. 2005, 51, 1635–1649. [Google Scholar] [CrossRef]
- Zhu, F.; Huang, Y.; Xue, C.; Mihaylova, L.; Chambers, J. A Sliding Window Variational Outlier-Robust Kalman Filter Based on Student’s t Noise Modelling. IEEE Trans. Aerosp. Electron. Syst. 2022. [Google Scholar] [CrossRef]
- Lehmann, F.; Pieczynski, W. Reduced-Dimension Filtering in Triplet Markov Models. IEEE Trans. Autom. Control 2021, 67, 605–617. [Google Scholar] [CrossRef]
- Ait-El-Fquih, B.; Desbouvries, F. Kalman Filtering in Triplet Markov Chains. IEEE Trans. Signal Process. 2006, 54, 2957–2963. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | OBKF | IOBKF | IOBKF | IOBKF | IOBKF | IOBKF | UIOBKF |
|---|---|---|---|---|---|---|---|
| (n = 1) | (n = 5) | (n = 10) | (n = 15) | (n = 20) | (n = 15) | ||
| MSE (m) | 2.3369 | 2.4555 | 2.3852 | 2.3470 | 2.3373 | 2.3370 | 2.3423 |
| Time (s) | 0.0722 | 0.0248 | 0.0361 | 0.0439 | 0.0506 | 0.0562 | 0.0505 |
| Algorithms | OBKF | IOBKF | IOBKF | IOBKF | IOBKF | IOBKF | UIOBKF |
|---|---|---|---|---|---|---|---|
| (n = 1) | (n = 5) | (n = 10) | (n = 15) | (n = 20) | (n = 15) | ||
| MSE (m) | 4.7037 | 4.7034 | 4.7302 | 4.7211 | 4.7180 | 4.7163 | 4.7206 |
| Time (s) | 0.1259 | 0.0235 | 0.0345 | 0.0429 | 0.0507 | 0.0580 | 0.0508 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Lian, F.; Gao, X.; Kong, Y.; Chen, G.; Dai, S. An Efficient Estimation Method for Dynamic Systems in the Presence of Inaccurate Noise Statistics. Electronics 2022, 11, 3548. https://doi.org/10.3390/electronics11213548
Zhang G, Lian F, Gao X, Kong Y, Chen G, Dai S. An Efficient Estimation Method for Dynamic Systems in the Presence of Inaccurate Noise Statistics. Electronics. 2022; 11(21):3548. https://doi.org/10.3390/electronics11213548
Chicago/Turabian StyleZhang, Guanghua, Feng Lian, Xin Gao, Yinan Kong, Gong Chen, and Shasha Dai. 2022. "An Efficient Estimation Method for Dynamic Systems in the Presence of Inaccurate Noise Statistics" Electronics 11, no. 21: 3548. https://doi.org/10.3390/electronics11213548