

Improving FMCW GPR Precision through the CZT Algorithm for Pavement Thickness Measurements

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Principle and System Scheme
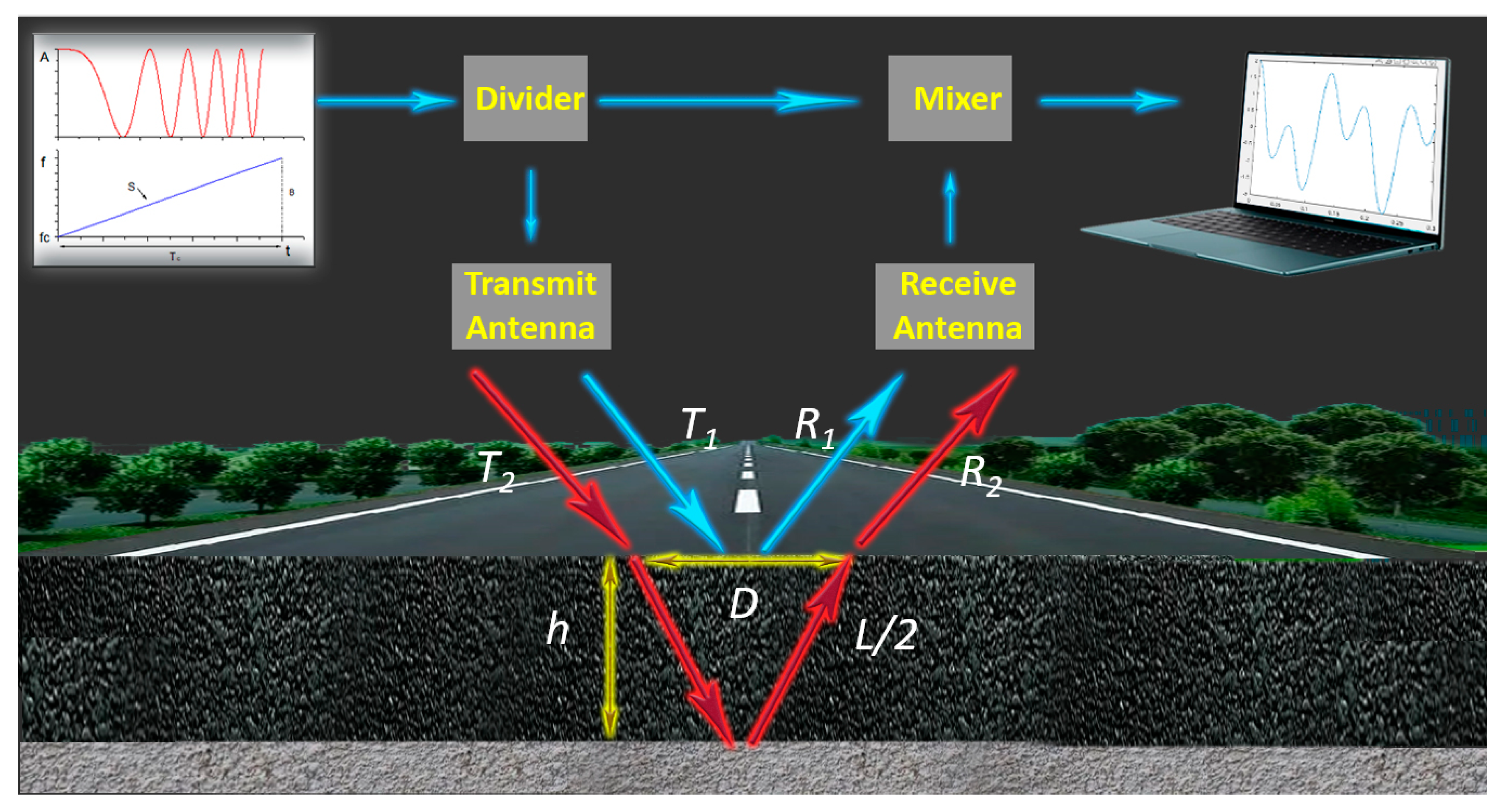
2.1. FMCW GRP Measurement System
2.2. Chirp-z Transformation
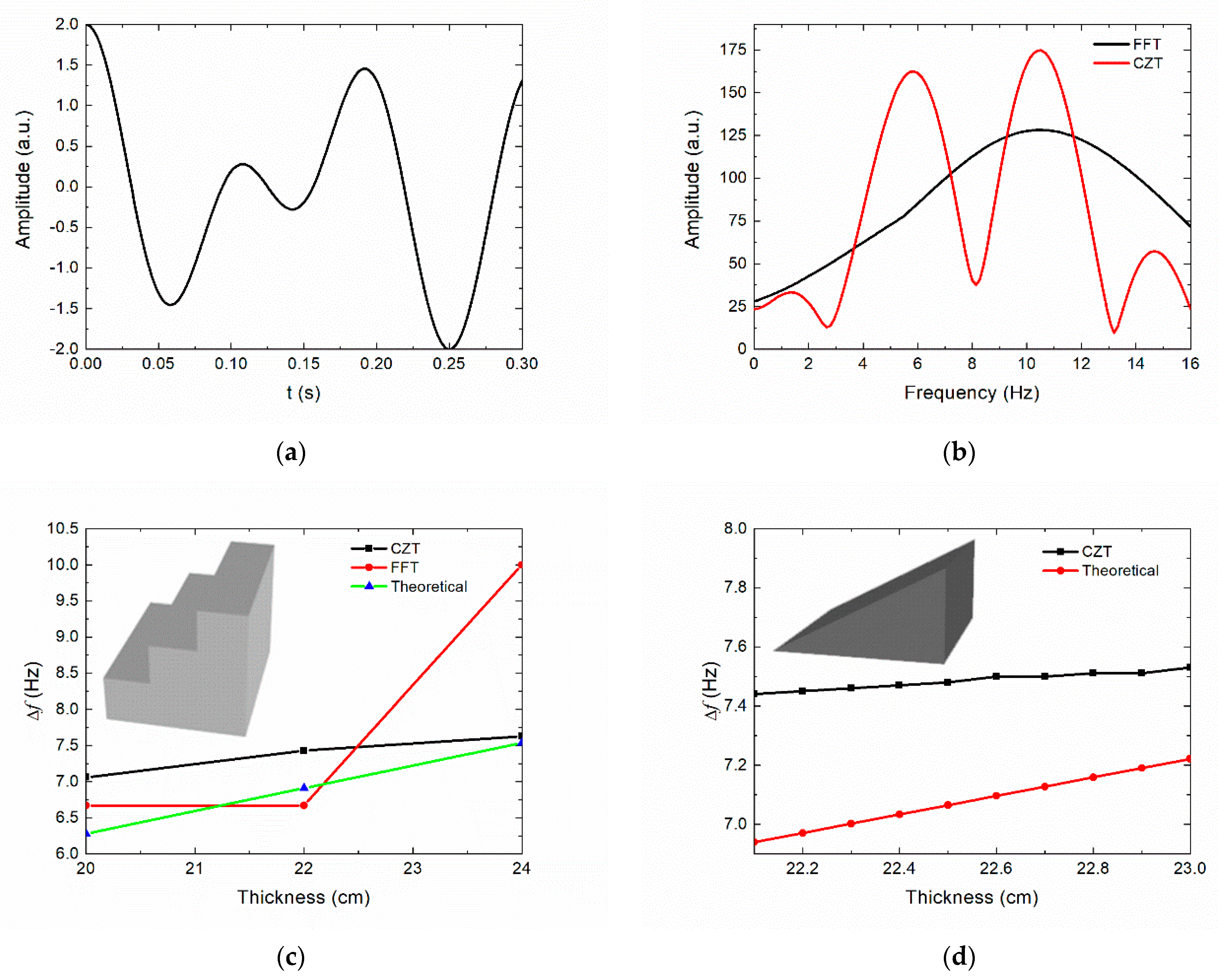
2.3. Numerical Simulation
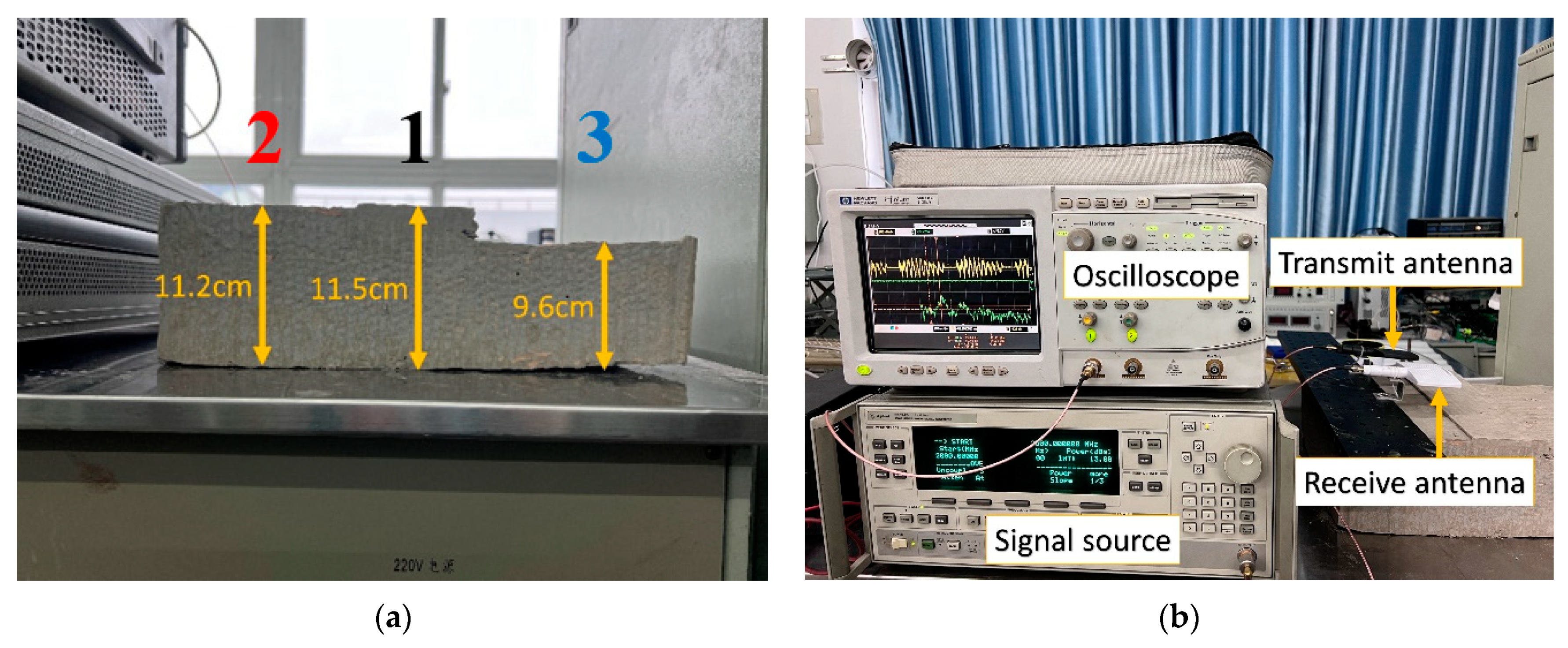
3. Experiments
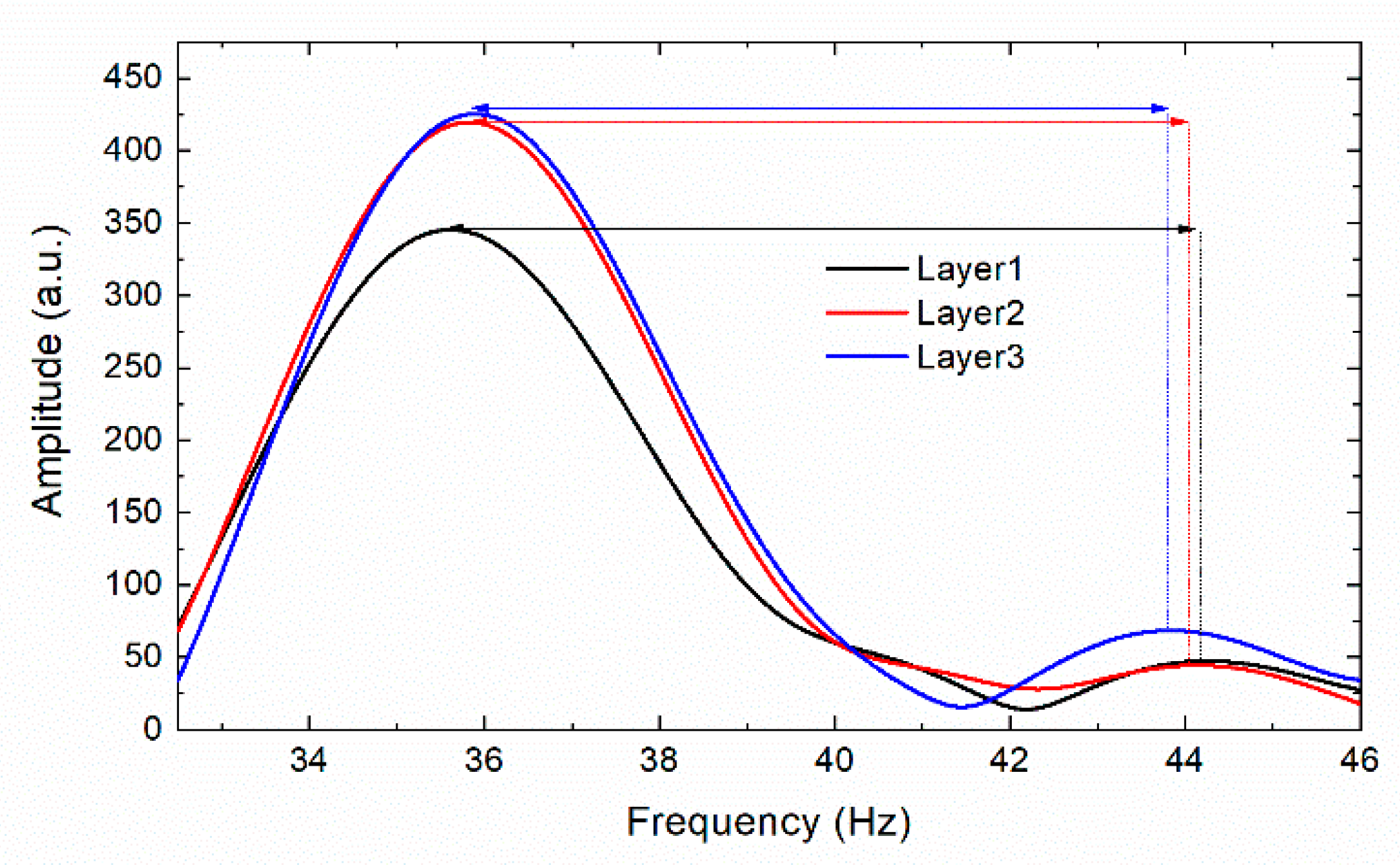
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Plati, C.; Loizos, A.; Gkyrtis, K. Assessment of Modern Roadways Using Non-destructive Geophysical Surveying Techniques. Surv. Geophys. 2020, 41, 395–430. [Google Scholar] [CrossRef]
- Elseicy, A.; Alonso-Díaz, A.; Solla, M.; Rasol, M.; Santos-Assunçao, S. Combined Use of GPR and Other NDTs for Road Pavement Assessment: An Overview. Remote Sens. 2022, 14, 4336. [Google Scholar] [CrossRef]
- AL-Qadi, I.L.; Lahouar, S. Measuring layer thicknesses with GPR—Theory to practice. Constr. Build. Mater. 2005, 19, 763–772. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Leng, Z.; Lahouar, S.; Baek, J. In-Place Hot-Mix Asphalt Density Estimation Using Ground-Penetrating Radar. Transp. Res. Rec. 2010, 2152, 19–27. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Vennapusa, P.K.R.; White, D.J.; Beresnev, I. Pavement thickness and stabilised foundation layer assessment using ground-coupled GPR. Nondestruct. Test. Eval. 2016, 31, 267–287. [Google Scholar] [CrossRef]
- Guo, C. Extraction of the Pavement Permittivity and Thickness From Measured Ground-Coupled GPR Data Using a Ground-Wave Technique. IEEE Geosci. Remote Sens. Lett. 2017, 14, 399–403. [Google Scholar] [CrossRef]
- Cui, L. FDTD Simulation for Moisture Asphalt Pavement Thickness and Density Estimation Utilizing Ground Penetrating Radar. KSCE J. Civ. Eng. 2021, 25, 3336–3345. [Google Scholar] [CrossRef]
- Ožbolt, M.; Rukavina, T.; Domitrović, J. Comparison of the Pavement Layers Thickness Measured by Georadar and Conventional Methods—Examples From Croatia. Balt. J. Road Bridge Eng. 2012, 7, 30–35. [Google Scholar] [CrossRef]
- De Coster, A. Evaluation of pavement layer thicknesses using GPR: A comparison between full-wave inversion and the straight-ray method. Construction and Building Materials 2018, 168, 91–104. [Google Scholar] [CrossRef]
- Bezina, Š. Spatial Representation of GPR Data—Accuracy of Asphalt Layers Thickness Mapping. Remote Sens. 2021, 13, 864. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, S.; Al-Qadi, I.L. Real-Time Density and Thickness Estimation of Thin Asphalt Pavement Over-lay During Compaction Using Ground Penetrating Radar Data. Surv. Geophys. 2020, 41, 431–445. [Google Scholar] [CrossRef]
- Puente, I. Validation of mobile LiDAR surveying for measuring pavement layer thicknesses and volumes. NDT E Int. 2013, 60, 70–76. [Google Scholar] [CrossRef]
- Qiu, Z.; Zhao, Z.; Chen, S.; Zeng, J.; Huang, Y.; Xiang, B. Application of an Improved YOLOv5 Algorithm in Real-Time Detection of Foreign Objects by Ground Penetrating Radar. Remote Sens. 2022, 14, 1895. [Google Scholar] [CrossRef]
- Hamdan, H.; Economou, N.; Vafidis, A.; Bano, M.; Ortega-Ramirez, J. A New Approach for Adaptive GPR Diffraction Focusing. Remote Sens. 2022, 14, 2547. [Google Scholar] [CrossRef]
- Qi, S.; Li, G.; Chen, D.; Chai, M.; Zhou, Y.; Du, Q.; Cao, Y.; Tang, L.; Jia, H. Damage Properties of the Block-Stone Embankment in the Qinghai–Tibet Highway Using Ground-Penetrating Radar Imagery. Remote Sens. 2022, 14, 2950. [Google Scholar] [CrossRef]
- Oliveira, R.J.; Caldeira, B.; Teixidó, T.; Borges, J.F.; Carneiro, A. Increasing the Lateral Resolution of 3D-GPR Datasets through 2D-FFT Interpolation with Application to a Case Study of the Roman Villa of Horta da Torre (Fronteira, Portugal). Remote Sens. 2022, 14, 4069. [Google Scholar] [CrossRef]
- Skolnik, M.I. Introduction to Radar Systems, 3rd ed.; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Culshaw, B.; Giles, I. Frequency modulated heterodyne optical fiber Sagnac interferometer. IEEE J. Quantum Electron. 1982, 18, 690–693. [Google Scholar] [CrossRef]
- Surendra, P. FMCW—Radar Design. IETE J. Res. 2019, 65, 576–577. [Google Scholar] [CrossRef]
- Schreiner, N.S.; Baccouche, B.; Sauer-Greff, W.; Urbansky, R.; Friederich, F. In Proceedings of the High-Resolution FMCW Millimeter-Wave and Terahertz Thickness Measurements 2017 European Radar Conference (EURAD), Nuremberg, Germany, 10–12 October 2017. [CrossRef]
- Chopard, A. Terahertz waves for contactless control and imaging in aeronautics industry. NDT E Int. 2021, 122, 102473. [Google Scholar] [CrossRef]
- Ayhan, S. Millimeter-Wave Radar Sensor for Snow Height Measurements. IEEE Trans. Geosci. Remote Sens. 2017, 55, 854–861. [Google Scholar] [CrossRef]
- Pomerleau, P. Low Cost and Compact FMCW 24 GHz Radar Applications for Snowpack and Ice Thickness Measurements. Sensors 2020, 20, 3909. [Google Scholar] [CrossRef] [PubMed]
- Bhutani, A. The Role of Millimeter-Waves in the Distance Measurement Accuracy of an FMCW Radar Sensor. Sensors 2019, 19, 3938. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bhutani, A.; Marahrens, S.; Kretschmann, M.; Ayhan, S.; Scherr, S.; Göttel, B.; Pauli, M.; Zwick, T. Applications of radar measurement technology using 24 GHz, 61 GHz, 80 GHz and 122 GHz FMCW radar sensors. Tm—Tech. Mess. 2022, 89, 107–121. [Google Scholar] [CrossRef]
- Thomas, S.; Bredendiek, C.; Pohl, N. A SiGe-Based 240-GHz FMCW Radar System for High-Resolution Measurements. IEEE Trans. Microw. Theory Tech. 2019, 67, 4599–4609. [Google Scholar] [CrossRef]
- Huaqing, L.; He, Z. Study on Signal Processing of FMCW Ground Penetrating Radar. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009. [Google Scholar] [CrossRef]
- Liu, C.R.; Li, J.; Gan, X.; Xing, H.; Chen, X. Pavement thickness measurement using FM-CW radar. Subsurface and Surface Sensing Technologies and Applications III 2001. Proc. SPIE 2001, 4491, 159–166. [Google Scholar] [CrossRef]
- Rabiner, L.; Schafer, R.; Rader, C. The chirp z-transform algorithm. IEEE Trans. Audio Electroacoust. 1969, 17, 86–92. [Google Scholar] [CrossRef]
- Qin, M.; Li, D.; Tang, X.; Zeng, C.; Li, W.; Xu, L. A Fast High-Resolution Imaging Algorithm for Helicopter-Borne Rotating Array SAR Based on 2-D Chirp-Z Transform. Remote Sens. 2019, 11, 1669. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, T.; Zhang, C.; Lu, D.; Zeng, Q.; Fu, W.; Yan, Y. Improving FMCW GPR Precision through the CZT Algorithm for Pavement Thickness Measurements. Electronics 2022, 11, 3524. https://doi.org/10.3390/electronics11213524
Huang T, Zhang C, Lu D, Zeng Q, Fu W, Yan Y. Improving FMCW GPR Precision through the CZT Algorithm for Pavement Thickness Measurements. Electronics. 2022; 11(21):3524. https://doi.org/10.3390/electronics11213524
Chicago/Turabian StyleHuang, Tongxing, Chaoyang Zhang, Dun Lu, Qiuyu Zeng, Wenjie Fu, and Yang Yan. 2022. "Improving FMCW GPR Precision through the CZT Algorithm for Pavement Thickness Measurements" Electronics 11, no. 21: 3524. https://doi.org/10.3390/electronics11213524