
Industrial Ergonomics Risk Analysis Based on 3D-Human Pose Estimation



Abstract
:1. Introduction
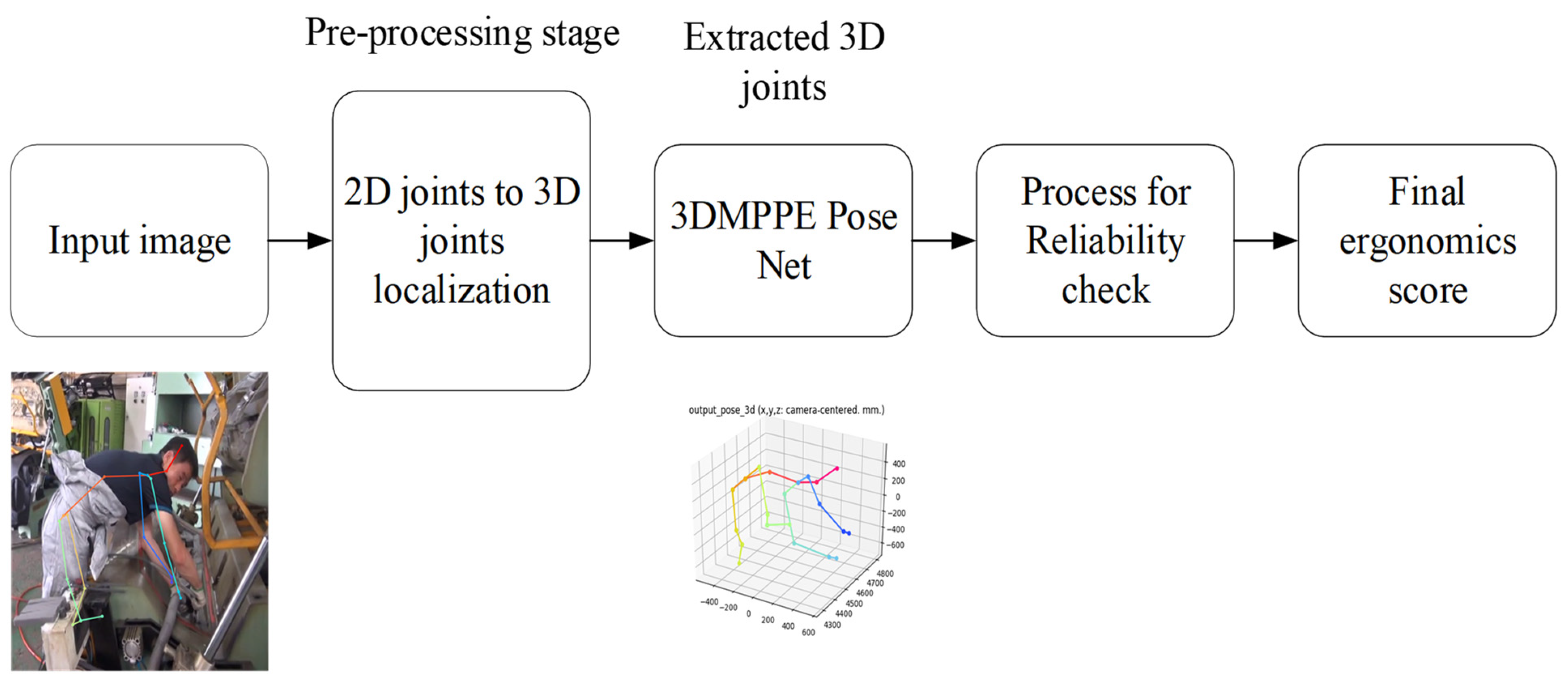
- We propose a framework for an automatic pose analysis of industrial workers to prevent long-term MSDs.
- We propose a novel approach of reliability decision to make sure input video sequence is appropriate for industrial workers’ pose analysis.
- We present a linear model for the reliability analysis, producing an accuracy estimate for a corresponding workers’ pose input.
- We aim for our research to be beneficial in ergonomics-related work to prevent a human workforce in the long term by reducing unnecessary injuries caused by bad posture working conditions.
2. Related Work
3. Method
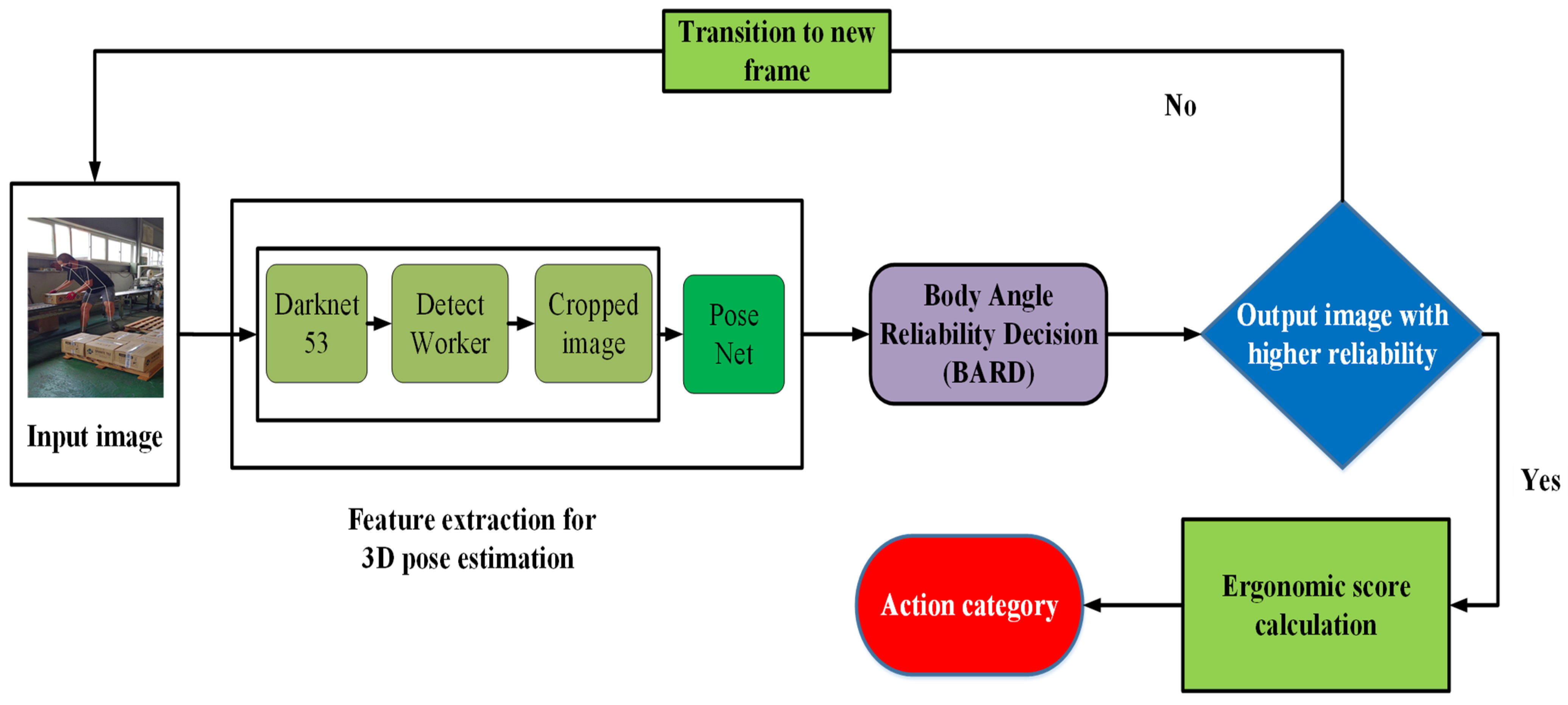
3.1. Fetaure Extraction and Worker Detection
3.2. Our Approach to Pose Estimation
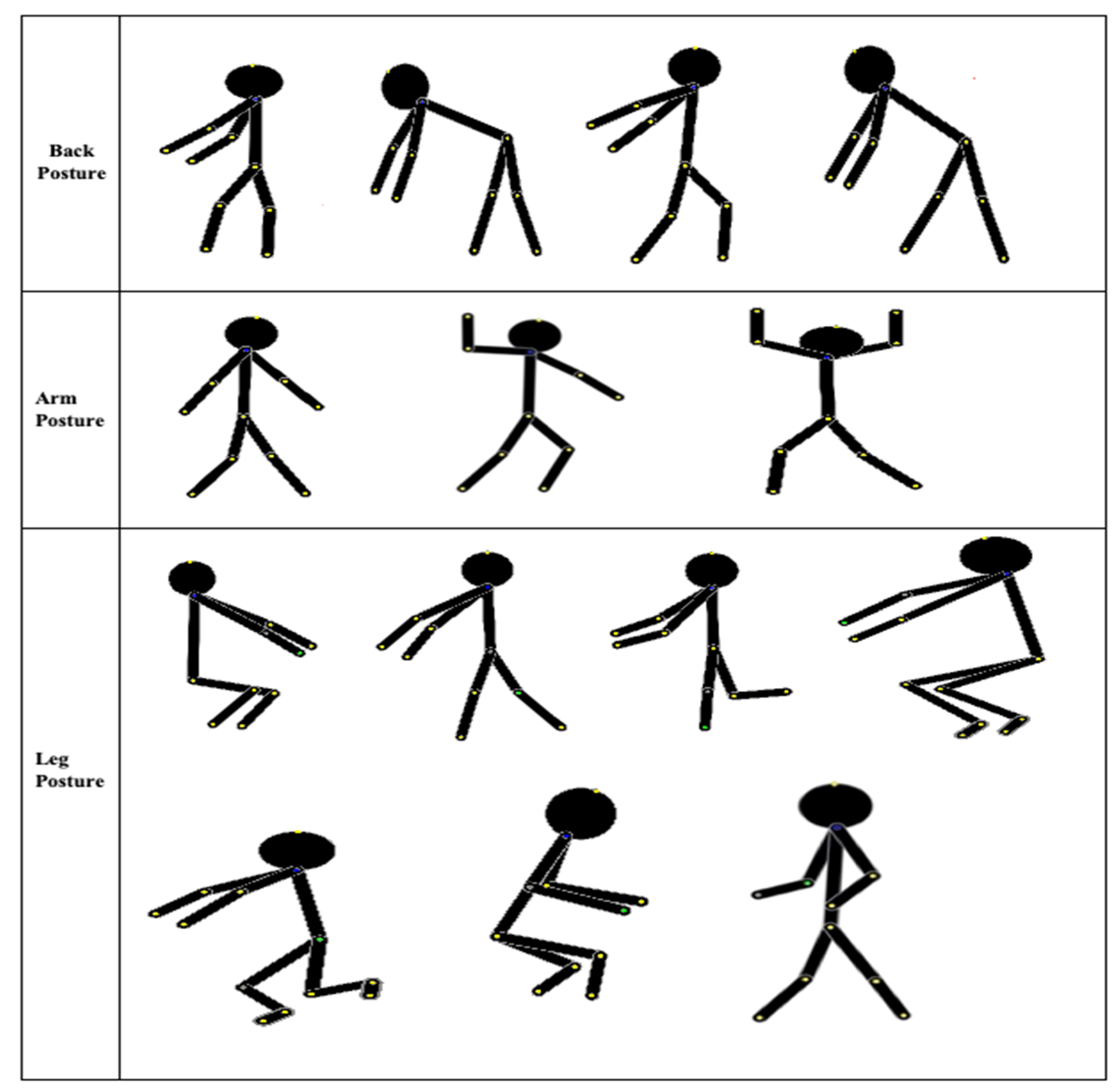
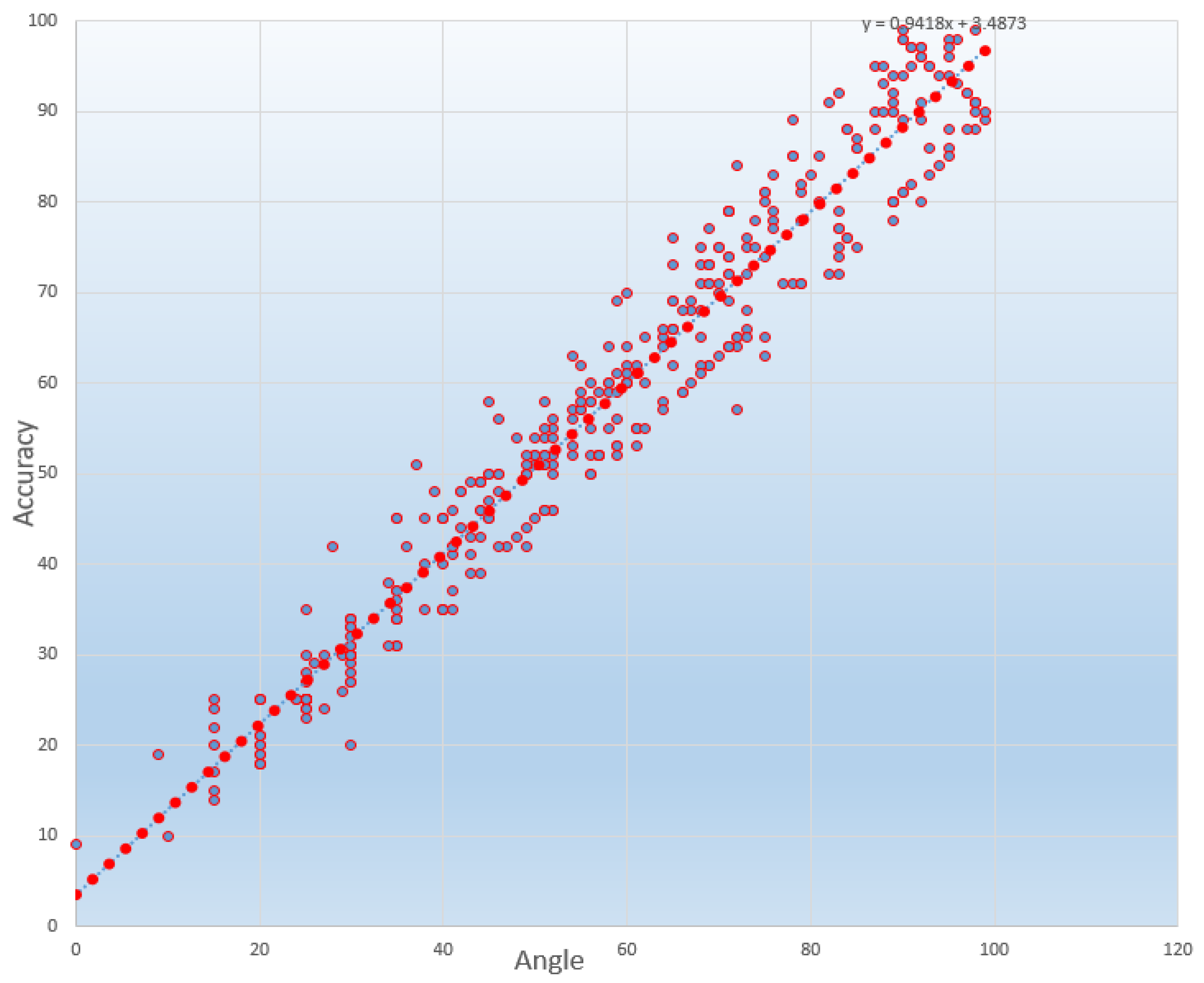
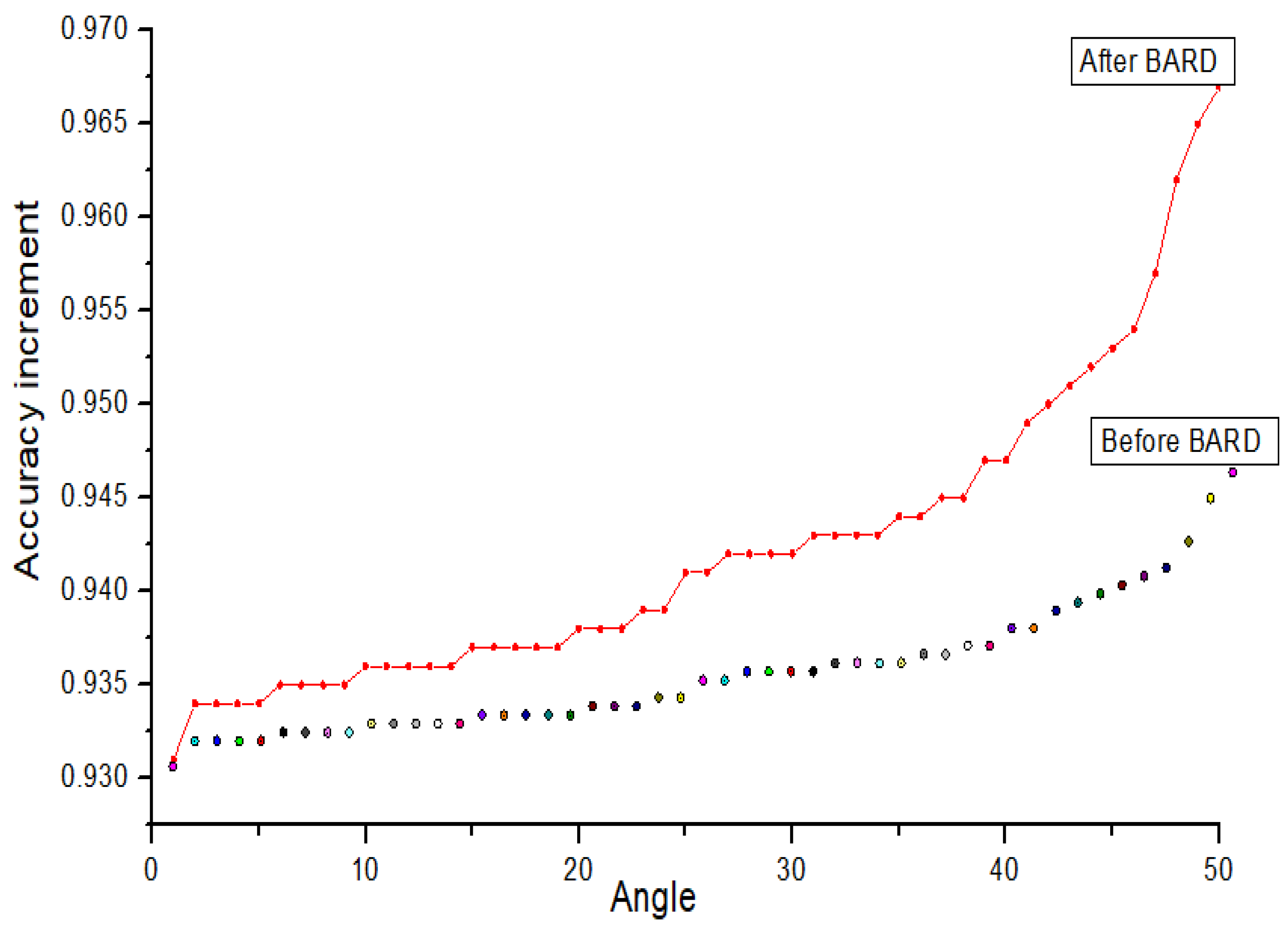
3.3. Body Angle Reliability Decicion (BARD)
4. Experiments and Results
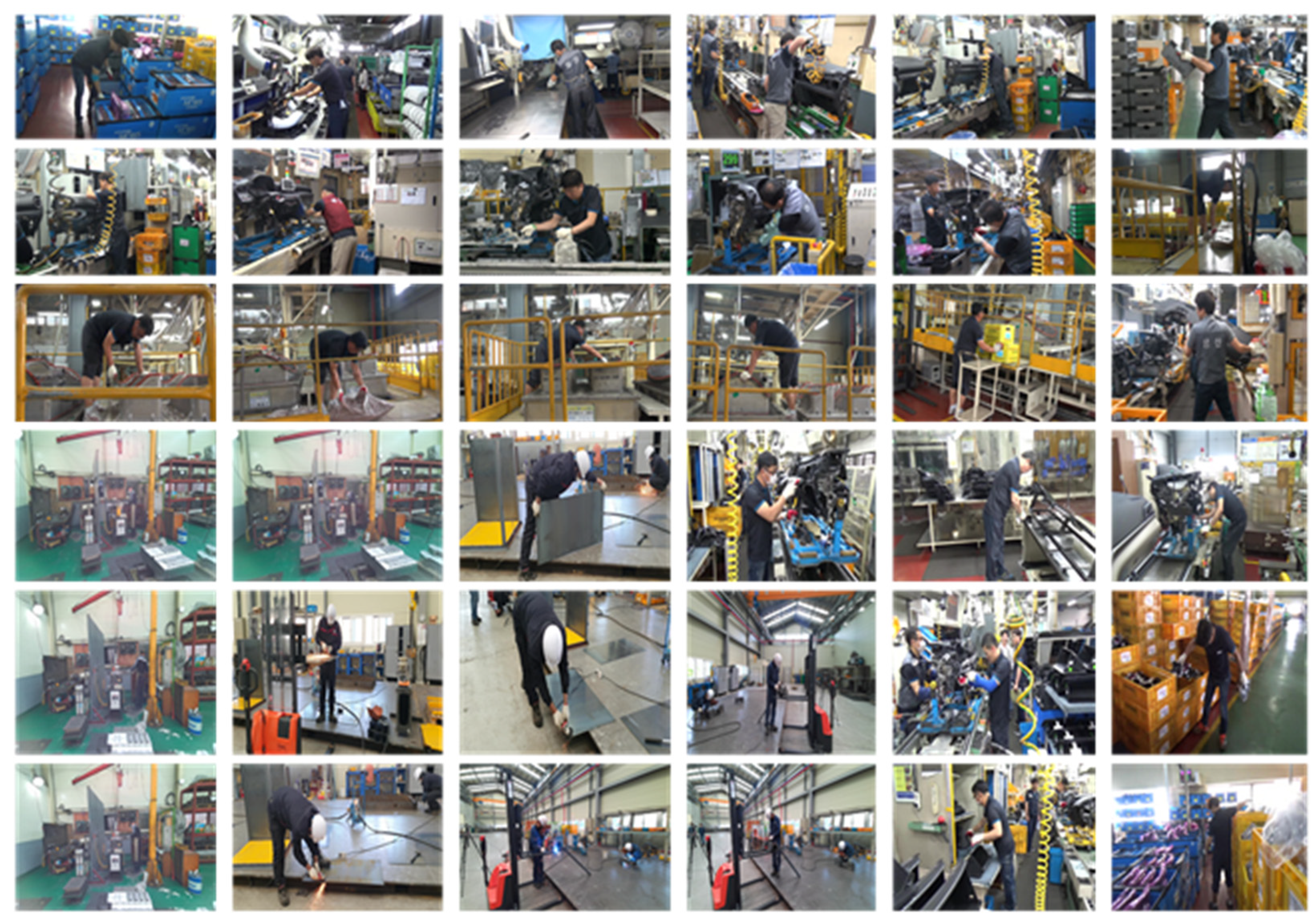
4.1. Datasets Preparation and Extraction
4.2. OWAS Score Analysis
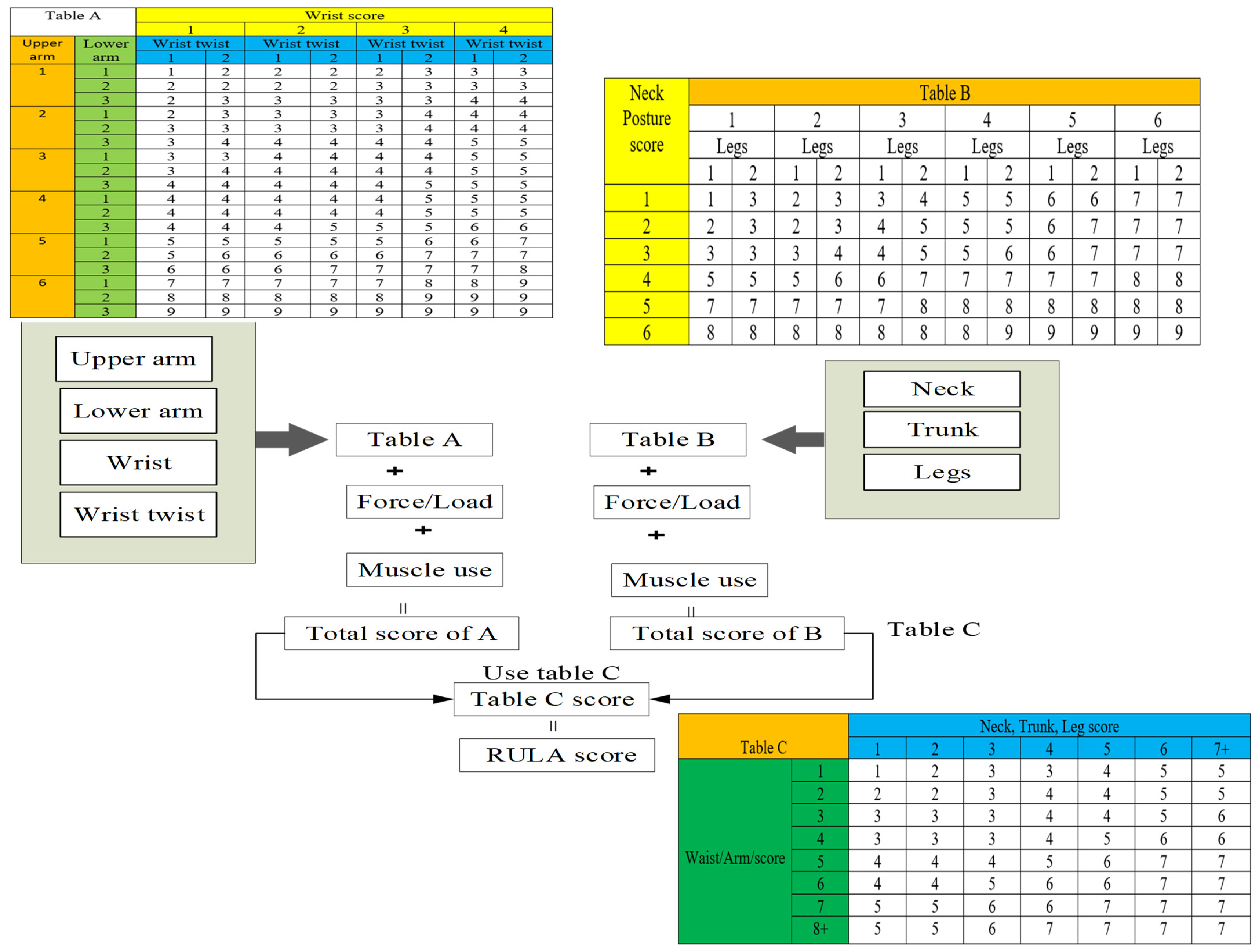
4.3. RULA Score Analysis
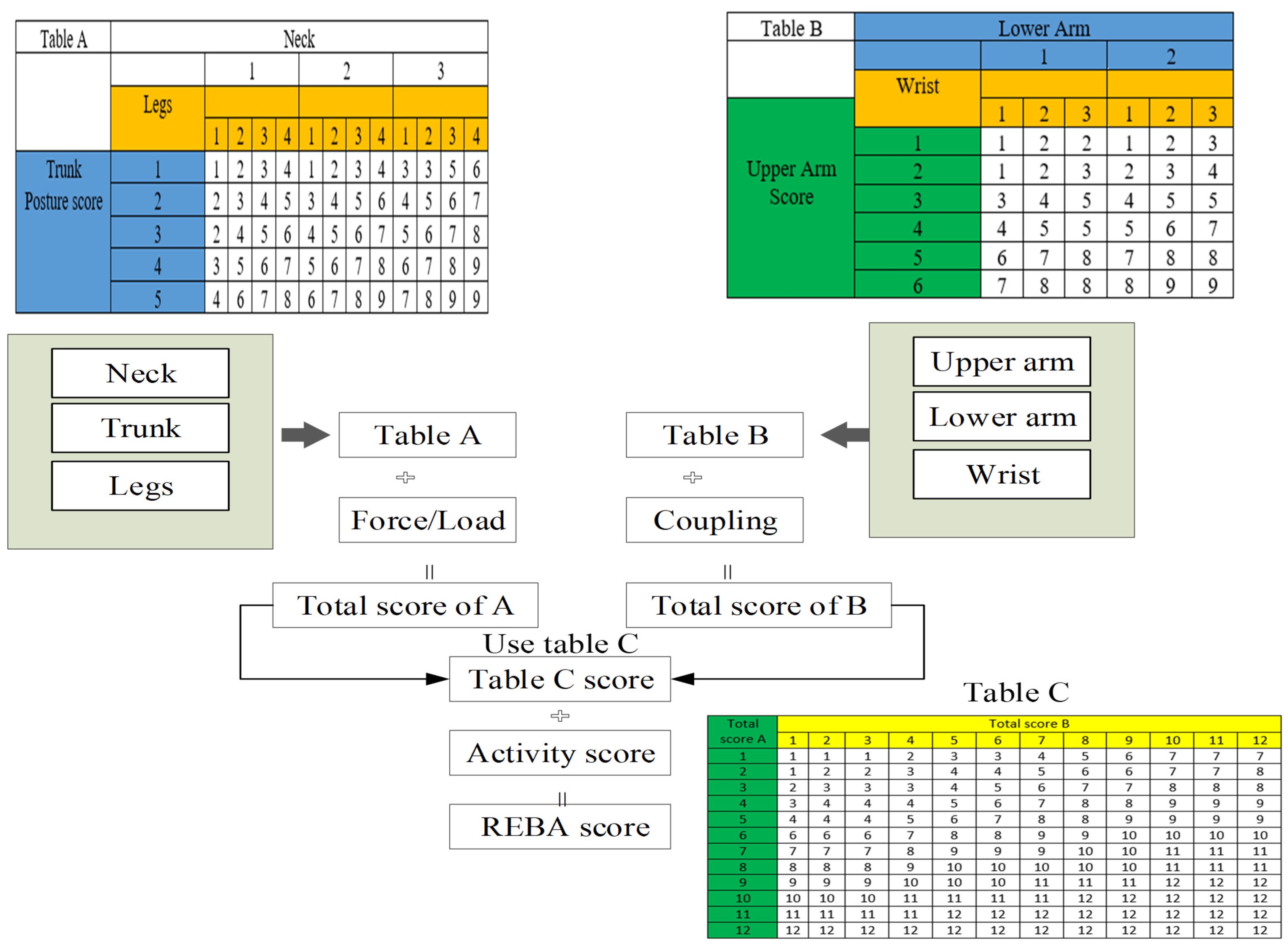
4.4. REBA Score Analysis
5. Discussion and Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bureau of Labor Statistics, US Department of Labor. Nonfatal Occupational Injuries and Illnesses Resulting in Days Away from Work in 2015. 2016. Available online: https://www.bls.gov/news.release/pdf/osh2.pdf (accessed on 22 February 2018).
- Hignett, S.; McAtamney, L. Rapid Entire Body Assessment (REBA). Appl. Ergon. 2000, 31, 201–205. [Google Scholar] [CrossRef]
- McAtamney, L.; Corlett, E.N. RULA: A survey method for the investigation of work-related upper limb disorders. Appl. Ergon. 1993, 24, 91–99. [Google Scholar] [CrossRef]
- Wright, E.; Haslam, R. Manual handling risks and controls in a soft drinks distribution centre. Appl. Ergon. 1999, 30, 311–318. [Google Scholar] [CrossRef]
- Liu, H.; Liu, T.; Chen, Y.; Zhang, Z.; Li, Y.-F. EHPE: Skeleton Cues-based Gaussian Coordinate Encoding for Efficient Human Pose Estimation. IEEE Trans. Multimedia 2022, 2, 1–12. [Google Scholar] [CrossRef]
- Salvendy, G. The Occupational Ergonomics Handbook; Karwowski, W., William Marras, S., Eds.; CRC Press LLC: Boca Raton, FL, USA, 1999; p. 2065. ISBN 0-8493-2641-9. [Google Scholar]
- Plantard, P.; Auvinet, E.; Pierres, A.S.; Multon, F. Pose estimation with a kinect for ergonomic studies: Evaluation of the accuracy using a virtual man-nequin. Sensors 2015, 15, 1785–1803. [Google Scholar] [CrossRef] [PubMed]
- Liebregts, J.; Sonne, M.; Potvin, J. Photograph-based ergonomic evaluations using the Rapid Office Strain Assessment (ROSA). Appl. Ergon. 2016, 52, 317–324. [Google Scholar] [CrossRef] [PubMed]
- Moon, G.; Chang, J.Y.; Lee, K.M. Camera Distance-Aware Top-Down Approach for 3D Multi-Person Pose Estimation from a Single RGB Image. In Proceedings of the International Conference on Computer Vision, Souel, Korea, 27 October–3 November 2019. [Google Scholar] [CrossRef] [Green Version]
- Alexander, T.; Szegedy, C. Deeppose: Human pose estimation via deep neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1799–1807. [Google Scholar]
- Wei, S.-E.; Ramakrishna, V.; Kanade, T.; Sheikh, Y. Convolutional Pose Machines. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4724–4732. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Fang, S.; Zhang, Z.; Li, D.; Lin, K.; Wang, J. MFD Net: Collaborative Poses Perception and Matrix Fisher Distribution for Head Pose Estimation. IEEE Trans. Multimed. 2021, 24, 2449–2460. [Google Scholar] [CrossRef]
- Liu, H.; Liu, T.; Zhang, Z.; Sangaiah, A.K.; Yang, B.; Li, Y. ARHPE: Asymmetric Relation-Aware Representation Learning for Head Pose Estimation in Industrial Human–Computer Interaction. IEEE Trans. Ind. Inform. 2022, 18, 7107–7117. [Google Scholar] [CrossRef]
- Alejandro, N.; Yang, K.; Deng, J. Stacked hourglass networks for human pose estimation. In Proceedings of the European Conference on Computer Vision 2016, Amsterdam, The Netherlands, 23–28 June 2016. [Google Scholar]
- Su, K.; Yu, D.; Xu, Z.; Geng, X.; Wang, C. Multi-Person Pose Estimation with Enhanced Channel-Wise and Spatial Information. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Hoboken, NJ, USA, 10–13 June 2019; pp. 5667–5675. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Sun, K.; Cheng, T.; Jiang, B.; Deng, C.; Zhao, Y.; Liu, D.; Mu, Y.; Tan, M.; Wang, X.; et al. Deep High-Resolution Representation Learning for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 3349–3364. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Papandreou, G.; Zhu, T.; Kanazawa, N.; Toshev, A.; Tompson, J.; Bregler, C.; Murphy, K. Towards accurate multi-person pose estimation in the wild. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4903–4911. [Google Scholar]
- Fang, H.-S.; Xie, S.; Tai, Y.-W.; Lu, C. RMPE: Regional Multi-person Pose Estimation. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2353–2362. [Google Scholar]
- He, K.; Gkioxari, G.; Dollar, P.; Ross; Girshick, B. Mask R-CNN. In Proceedings of the ICCV, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Huang, J.; Zhu, Z.; Guo, F.; Huang, G. The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation. In Proceedings of the CVPR 2020, online, 14–19 June 2020; pp. 5699–5708. [Google Scholar] [CrossRef]
- Zhang, F.; Zhu, X.; Dai, H.; Ye, M.; Zhu, C. Distribution-Aware Coordinate Representation for Human Pose Estimation. In Proceedings of the CVPR 2020, Online, 14–19 June 2020; pp. 7091–7100. [Google Scholar] [CrossRef]
- Alejandro, N.; Huang, Z.; Deng, J. “Associative Embedding: End-to-End Learning for Joint Detection and Group-Ing.” Advances in Neural Information Processing Systems 30 (2017). Available online: https://proceedings.neurips.cc/paper/2017/file/8edd72158ccd2a879f79cb2538568fdc-Paper.pdf (accessed on 6 August 2022).
- Bin, Y.; Cao, X.; Chen, X.; Ge, Y.; Tai, Y.; Wang, C.; Li, J.; Huang, F.; Gao, C.; Sang, N. Adversarial Semantic Data Augmentation for Human Pose Estimation. In Proceedings of the ECCV 2020, Glasgow, UK, 23–28 August 2020; pp. 606–622. [Google Scholar] [CrossRef]
- Kocabas, M.; Karagoz, S.; Akbas, E. MultiPoseNet: Fast Multi-Person Pose Estimation Using Pose Residual Network. In Proceedings of the ECCV 2018, Munich, Germany, 8–14 September 2018; pp. 437–453. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Wang, C.; Zhu, H.; Mao, Y.; Fang, H.; Lu, C. Crowdpose: Efficient crowded scenes pose es-timation and a new benchmark. In Proceedings of the CVPR 2019, Long Beach Convention, CA, USA, 16–20 June 2019. [Google Scholar]
- Qiu, L.; Zhang, X.; Li, Y.; Li, G.; Wu, X.; Xiong, Z.; Han, X.; Cui, S. Peeking into Occluded Joints: A Novel Framework for Crowd Pose Estimation; Springer: Cham, Switzerland, 2020; pp. 488–504. [Google Scholar] [CrossRef]
- Zhou, L.; Chen, Y.; Gao, Y.; Wang, J.; Lu, H. Occlusion-Aware Siamese Network for Human Pose Estimation. In Proceedings of the ECCV 2020, Glasgow, UK, 23–28 August 2020; pp. 396–412. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef] [Green Version]
- Sergey Ioffe and Christian Szegedy. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the ACML 2015, Lille, France, 6–11 July 2015. [Google Scholar]
- Abobakr, A.; Nahavandi, D.; Iskander, J.; Hossny, M.; Nahavandi, S.; Smets, M. A kinect-based workplace postural analysis system using deep residual networks. In Proceedings of the ISSE 2017, Brussels, Belgium, 15 November 2017. [Google Scholar] [CrossRef]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.E.; Sheikh, Y. OpenPose: Realtime Multi-Person 2D Pose Estimation Using Part Affinity Fields. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 43, 172–186. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.E.; Sheikh, Y. Realtime multi-person 2d pose estimation using part affinity fields. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2017, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Bogo, F.; Black, M.J.; Loper, M.; Romero, J. Detailed Full-Body Reconstructions of Moving People from Monocular RGB-D Sequences. In Proceedings of the IEEE international conference on computer vision 2015, Washington, DC, USA, 2015; pp. 2300–2308. [Google Scholar] [CrossRef]
- Yu, T.; Zhao, J.; Zheng, Z.; Guo, K.; Dai, Q.; Li, H.; Pons-Moll, G.; Liu, Y. DoubleFusion: Real-Time Capture of Human Performances with Inner Body Shapes from a Single Depth Sensor. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 42, 2523–2539. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In Computer Vision–ECCV 2014. ECCV 2014. Lecture Notes in Computer Science; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer: Cham, Switzerland, 2014; Volume 8693. [Google Scholar] [CrossRef] [Green Version]
- Ionescu, C.; Papava, D.; Olaru, V.; Sminchisescu, C. Human3. 6m: Large scale datasets and predictive methods for 3d human sensing in natural environments. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 36, 1325–1339. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.; Lee, I.; Lee, S. Propagating LSTM: 3D Pose Estimation Based on Joint Interdependency. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 123–141. [Google Scholar] [CrossRef]
- Xu, J.; Yu, Z.; Ni, B.; Yang, J.; Yang, X.; Zhang, W. Deep kinematics analysis for monocular 3d human pose estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition 2020, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Chen, X.; Lin, K.-Y.; Liu, W.; Qian, C.; Lin, L. Weakly-Supervised Discovery of Geometry-Aware Representation for 3D Human Pose Estimation. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition 2019, Long Beach, CA, USA, 15–20 June 2019; pp. 10887–10896. [Google Scholar] [CrossRef] [Green Version]
- Martinez, J.; Hossain, M.; Rayat, I.; Romero, J.; Little, J.J. View invariant 3D human pose estimation. IEEE Trans. Circuits Syst. Video Technol. 2019, 30, 4601–4610. [Google Scholar]
- Andriluka, M.; Pishchulin, L.; Gehler, P.; Schiele, B. 2d human pose estimation: New benchmark and state of the art analysis. In Proceedings of the IEEE Conference on computer Vision and Pattern Recognition 2014, Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Pavllo, D.; Feichtenhofer, C.; Grangier, D.; Auli, M. 3d human pose estimation in video with temporal convolutions and semi-supervised training. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Imtiaz Hossain, M.R.; Little, J.L. Exploiting temporal information for 3d human pose estimation. In Proceedings of the ECCV 2018, Munich, Germany, 8–14 September 2018; pp. 69–86. [Google Scholar]
- Malik, J.; Abdelaziz, I.; Elhayek, A.; Shimada, S.; Ali, S.A.; Golyanik, V.; Theobalt, C.; Stricker, D. HandVoxNet: Deep Voxel-Based Network for 3D Hand Shape and Pose Estimation From a Single Depth Map. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 7111–7120. [Google Scholar] [CrossRef]
- Karhu, O.; Kansi, P.; Kuorinka, I. Correcting working postures in industry: A practical method for analysis. Appl. Ergon. 1977, 8, 199–201. [Google Scholar] [CrossRef]
- Rahman, A.; Nasrull, M.; Rani, M.R.A.; Rohani, J.M. WERA: An observational tool develop to investigate the physical risk factor associated with WMSDs. J. Hum. Ergol. 2011, 40, 19–36. [Google Scholar]
- Rahman, M.N.A.; Rahman, S.A.A.; Ismail, A.E.; Sadikin, A. Inter-Rater Reliability of the New Observational Method for Assessing an Exposure to Risk Factors Related to Work-Related Musculoskeletal Disorders (WMSDS). MATEC Web Conf. 2017, 135, 00024. [Google Scholar] [CrossRef]
- Cheng, B.; Xiao, B.; Wang, J.; Shi, H.; Huang, T.S.; Zhang, L. HigherHRNet: Scale-Aware Representation Learning for Bottom-Up Human Pose Estimation. In Proceedings of the CVPR 2020, online, 14–19 June 2020; pp. 5385–5394. [Google Scholar] [CrossRef]
- Luopajarvi, T. Ergonomic analysis of workplace and postural load. Ergonomics: The physiotherapist in the workplace. In Proceedings of the AIP Conference 2017, Yogyakarta, Indonesia, 9–10 November 2017; pp. 51–78. [Google Scholar]
- Yu, C. Occlusion-aware networks for 3d human pose estimation in video. In Proceedings of the IEEE/CVF Interna-tional Conference on Computer Vision 2019, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Burt, S.; Punnett, L. Evaluation of interrater reliability for posture observations in a field study. Appl. Ergon. 1999, 30, 121–135. [Google Scholar] [CrossRef]
- Martinez, J.; Hossain, R.; Romero, J.; Little, J.J. A simple yet effective baseline for 3d human pose estimation. In Proceedings of the IEEE International Conference on Computer Vision 2017, Venice, Italy, 22–29 October 2017. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Image | Waist | Arm | Leg | Weight | OWAS score | Action Category |
|---|---|---|---|---|---|---|
 | 3 | 3 | 2 | 1 | 1 | 1 |
 | 1 | 2 | 2 | 1 | 1 | 1 |
 | 1 | 1 | 2 | 1 | 1 | 1 |
 | 4 | 1 | 3 | 1 | 2 | 2 |
| Input Image | Neck Score | Trunk Score | Leg Score | U/A Score | L/A Score | Wrist Score | Action Category |
|---|---|---|---|---|---|---|---|
| 2 | 3 | 1 | 3 | 2 | 1 | 2 |
| 1 | 2 | 1 | 3 | 1 | 2 | 1 |
| 2 | 1 | 1 | 1 | 1 | 3 | 1 |
| 2 | 4 | 2 | 1 | 2 | 1 | 2 |
| Input Image | Neck Score | Trunk Score | Leg Score | U/A Score | L/A Score | Wrist Score | Action Category |
|---|---|---|---|---|---|---|---|
| 3 | 3 | 1 | 3 | 3 | 1 | 2 |
| 3 | 1 | 3 | 1 | 2 | 1 | 2 |
| 2 | 1 | 4 | 3 | 1 | 1 | 2 |
| 1 | 2 | 1 | 3 | 4 | 2 | 3 |
| Method | OWAS Accuracy | RULA Accuracy | REBA Accuracy |
|---|---|---|---|
| Before applying BARD | 91% | 92% | 92% |
| After applying BARD | 94% | 93% | 93% |
| Method | OWAS Accuracy | RULA Accuracy | REBA Accuracy |
|---|---|---|---|
| Before applying BARD | 74% | 78% | 81% |
| After applying BARD | 83% | 82% | 82% |
| Method | OWAS Accuracy | RULA Accuracy | REBA Accuracy |
|---|---|---|---|
| Before applying BARD | 91% | 92% | 92% |
| After applying BARD | 95% | 94% | 94% |
| Method | OWAS Accuracy | RULA Accuracy | REBA Accuracy |
|---|---|---|---|
| Before applying BARD | 78% | 86% | 86% |
| After applying BARD | 83% | 81% | 81% |
| Method | OWAS Accuracy | RULA Accuracy | REBA Accuracy |
|---|---|---|---|
| Higher HR Net | 73% | 75% | 72% |
| Ours | 75% | 76% | 74% |
| OWAS Score | ||
|---|---|---|
| Back | 0.959 | 0.941 |
| Arms | 0.943 | 0.941 |
| Legs | 0.946 | 0.947 |
| Risk | 0.961 | 0.958 |
| RULA Score | ||
|---|---|---|
| Table A score | 0.956 | 0.946 |
| Table B score | 0.947 | 0.947 |
| Risk | 0.931 | 0.941 |
| RULA Score | ||
|---|---|---|
| Table A score | 0.954 | 0.961 |
| Table B score | 0.944 | 0.936 |
| Risk | 0.941 | 0.924 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paudel, P.; Kwon, Y.-J.; Kim, D.-H.; Choi, K.-H. Industrial Ergonomics Risk Analysis Based on 3D-Human Pose Estimation. Electronics 2022, 11, 3403. https://doi.org/10.3390/electronics11203403
Paudel P, Kwon Y-J, Kim D-H, Choi K-H. Industrial Ergonomics Risk Analysis Based on 3D-Human Pose Estimation. Electronics. 2022; 11(20):3403. https://doi.org/10.3390/electronics11203403
Chicago/Turabian StylePaudel, Prabesh, Young-Jin Kwon, Do-Hyun Kim, and Kyoung-Ho Choi. 2022. "Industrial Ergonomics Risk Analysis Based on 3D-Human Pose Estimation" Electronics 11, no. 20: 3403. https://doi.org/10.3390/electronics11203403