
Control and Stability Analysis of the LCL-Type Grid-Connected Converter without Phase-Locked Loop under Weak Grid Conditions
Abstract
:1. Introduction
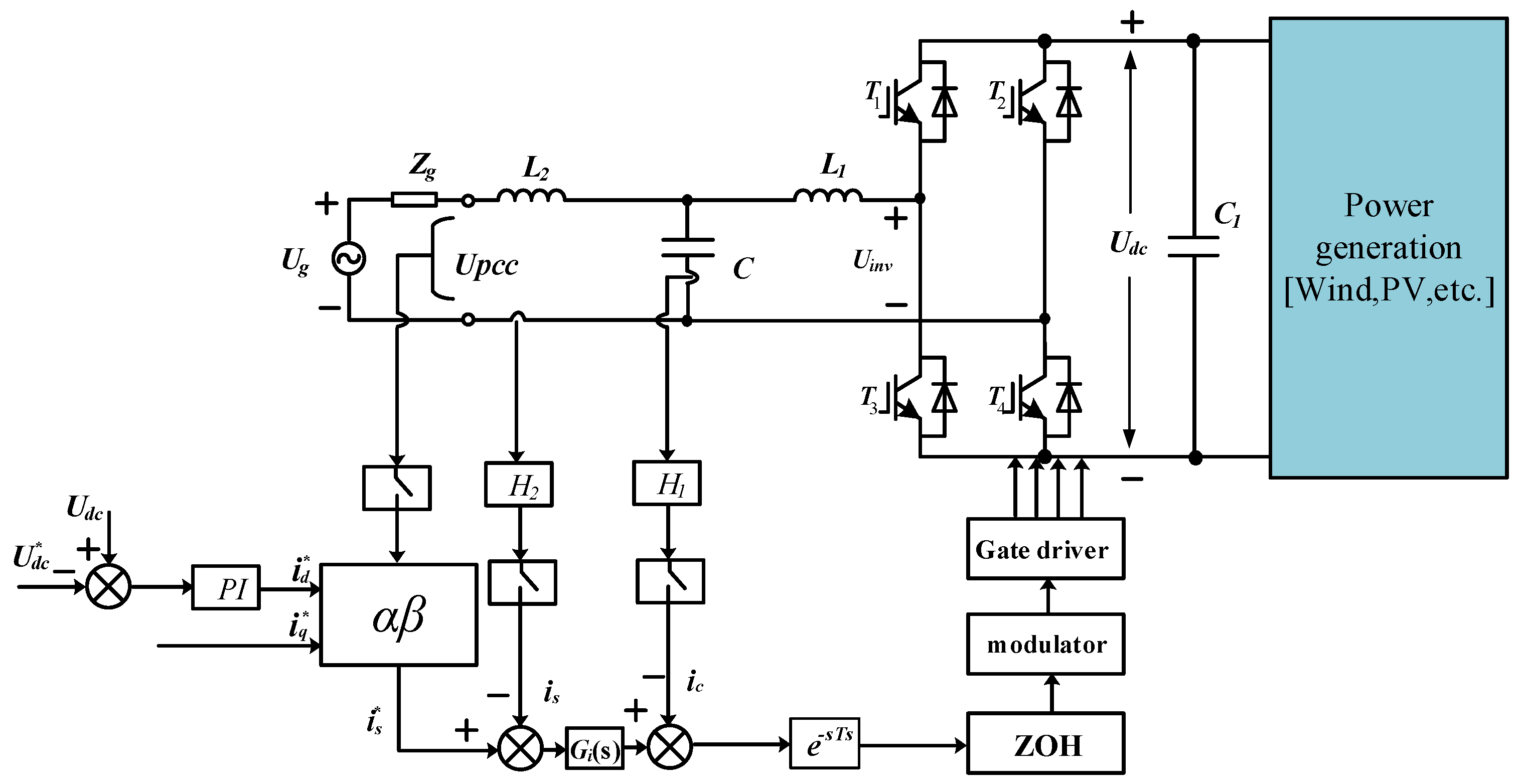
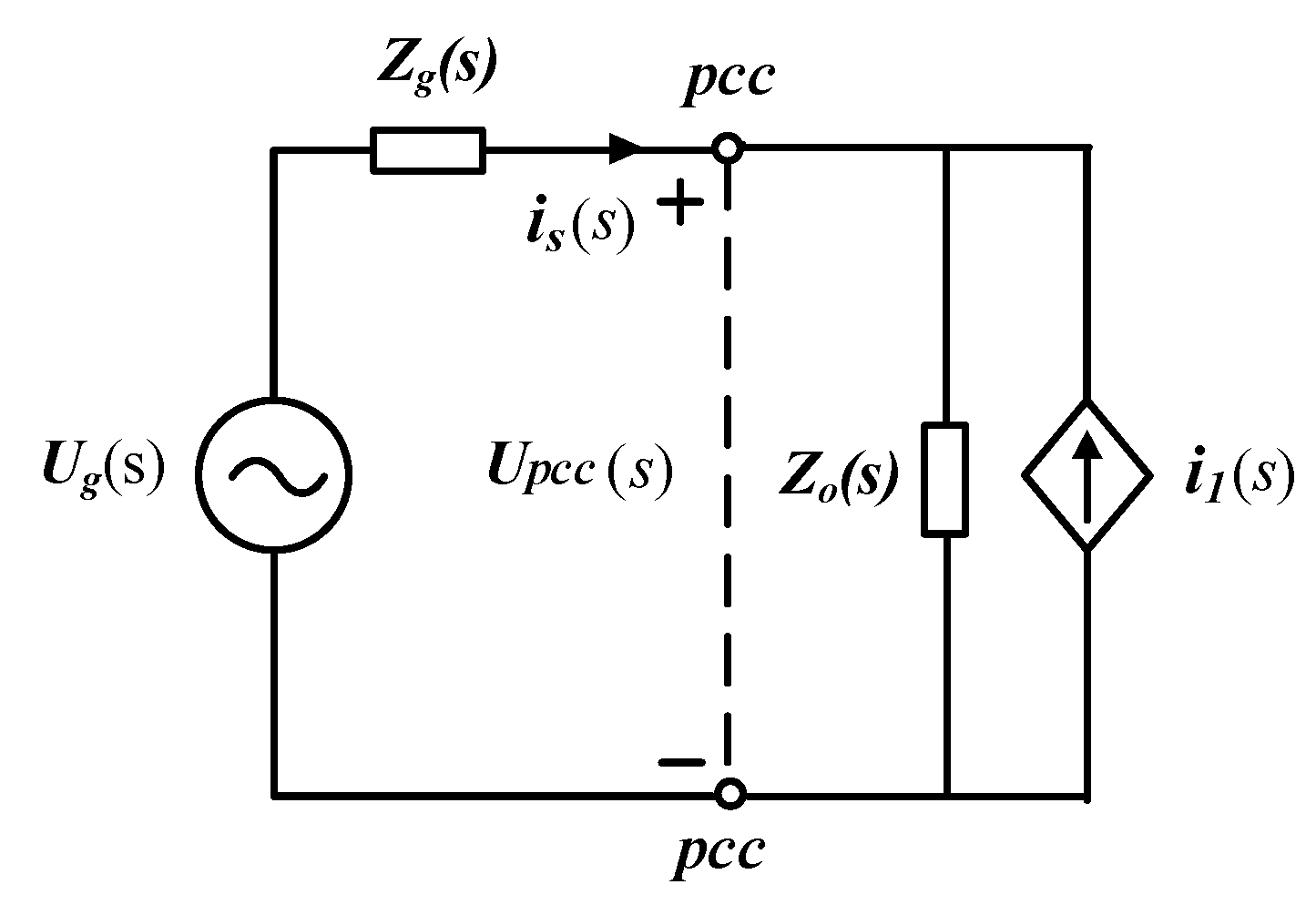
2. Model of a Single-Phase LCL-Type Grid-Connected Converter
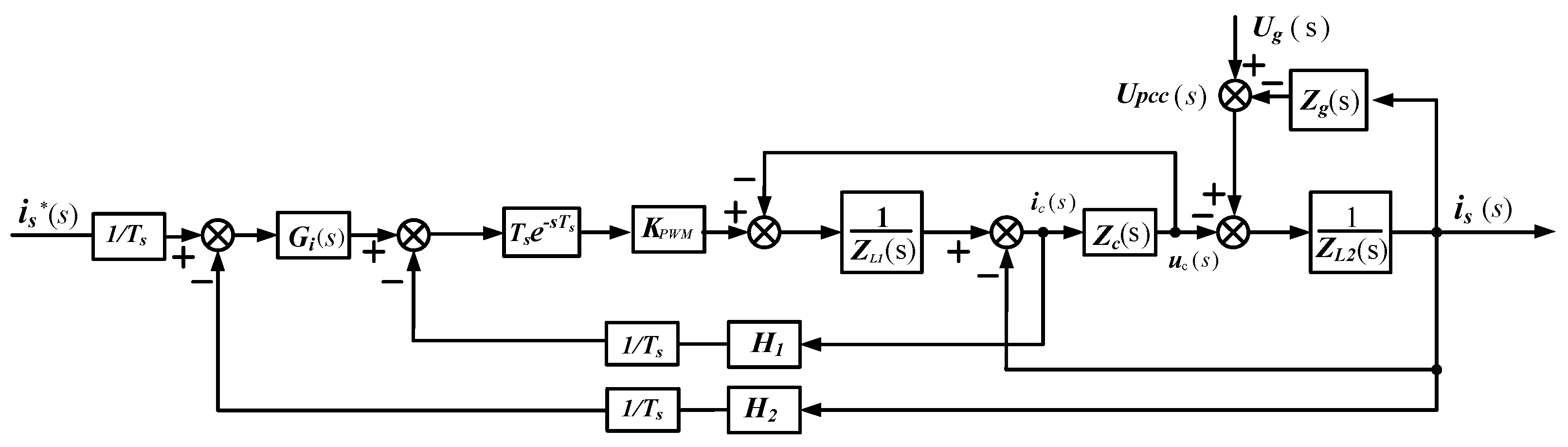
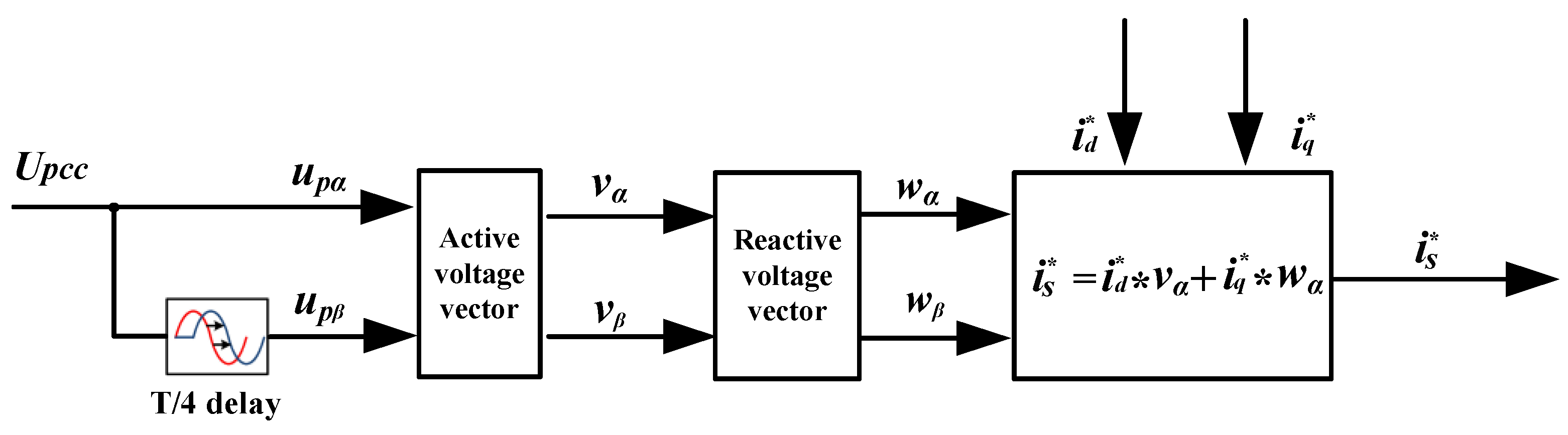
3. Control Strategies for Grid Currents
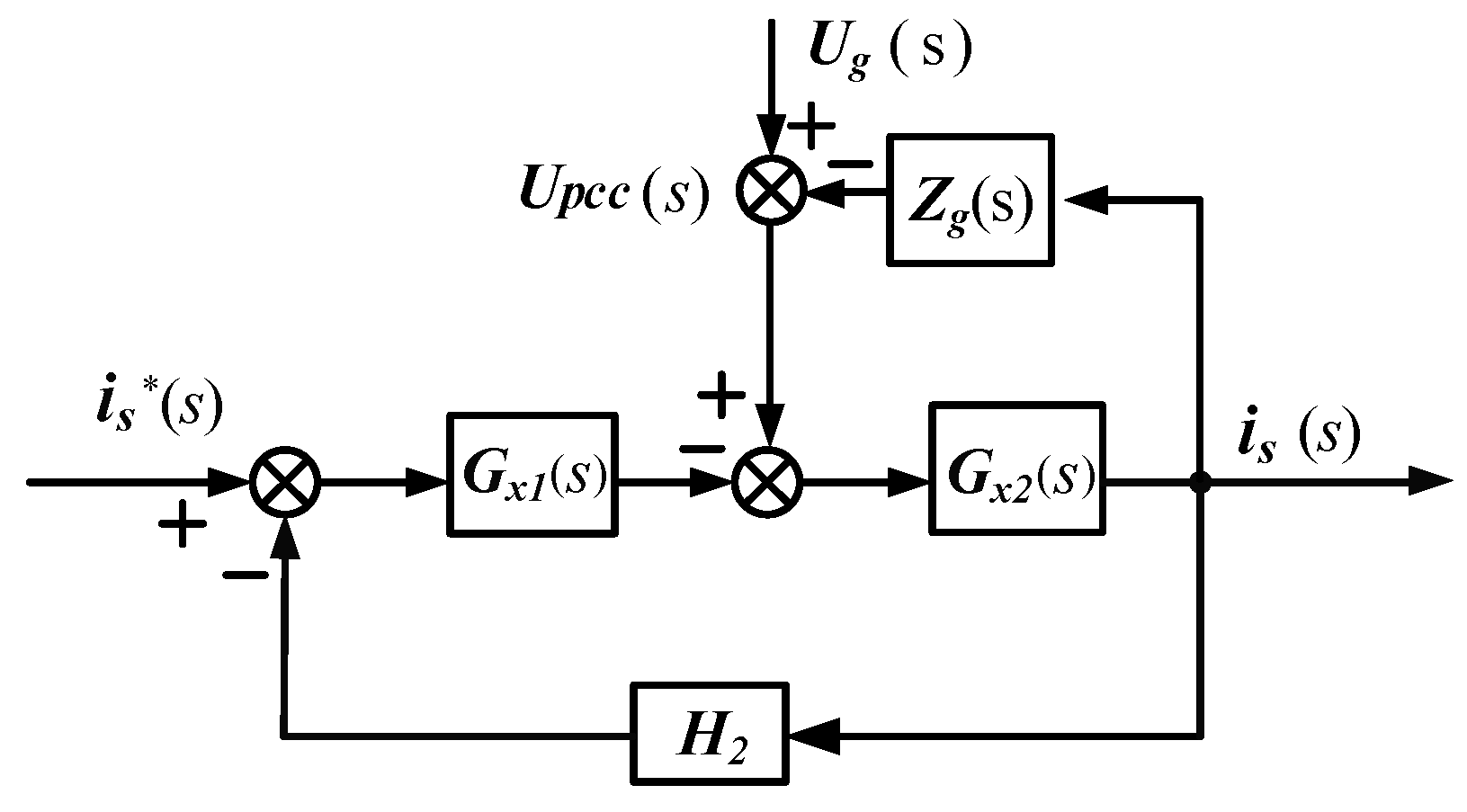
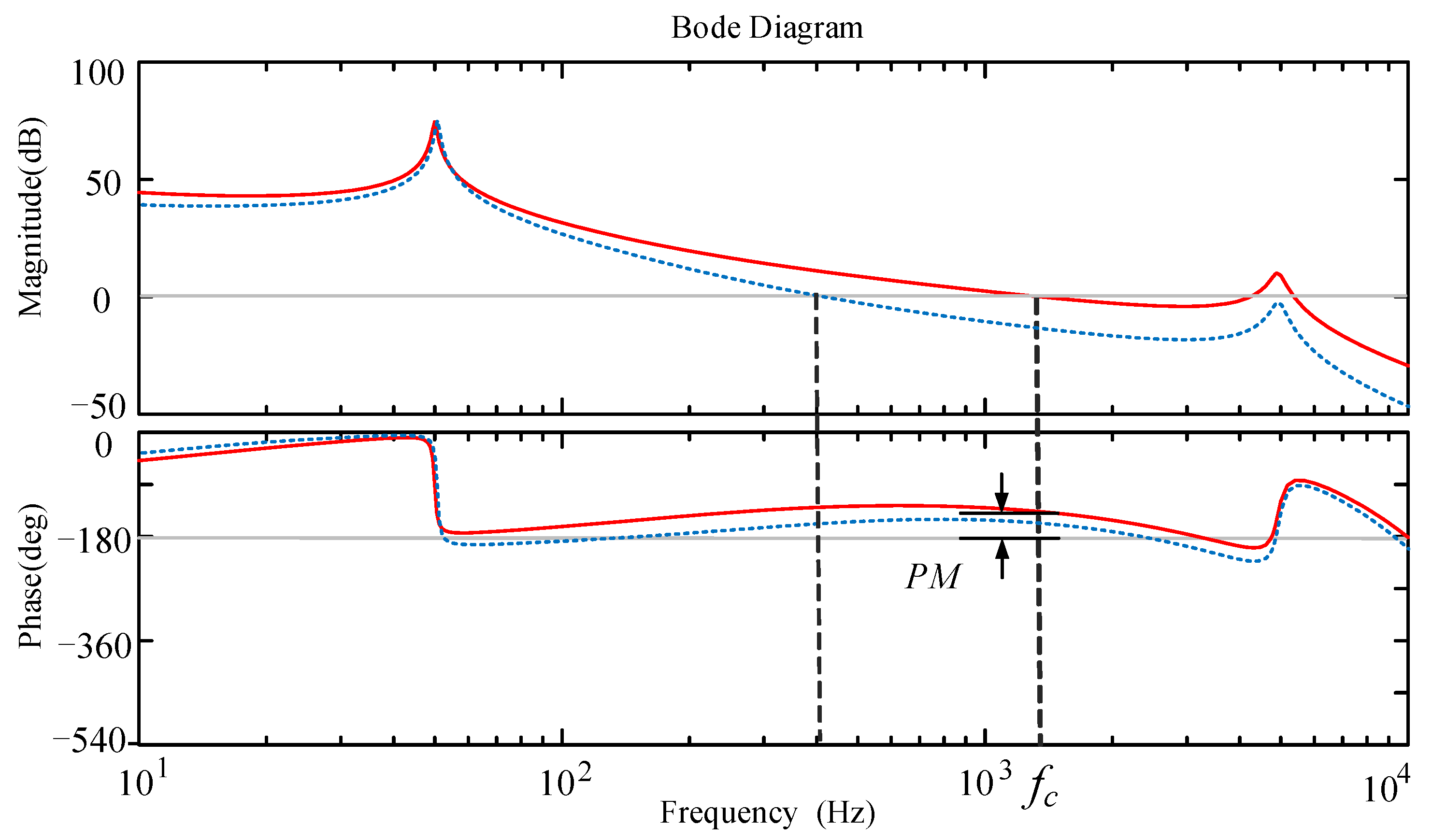
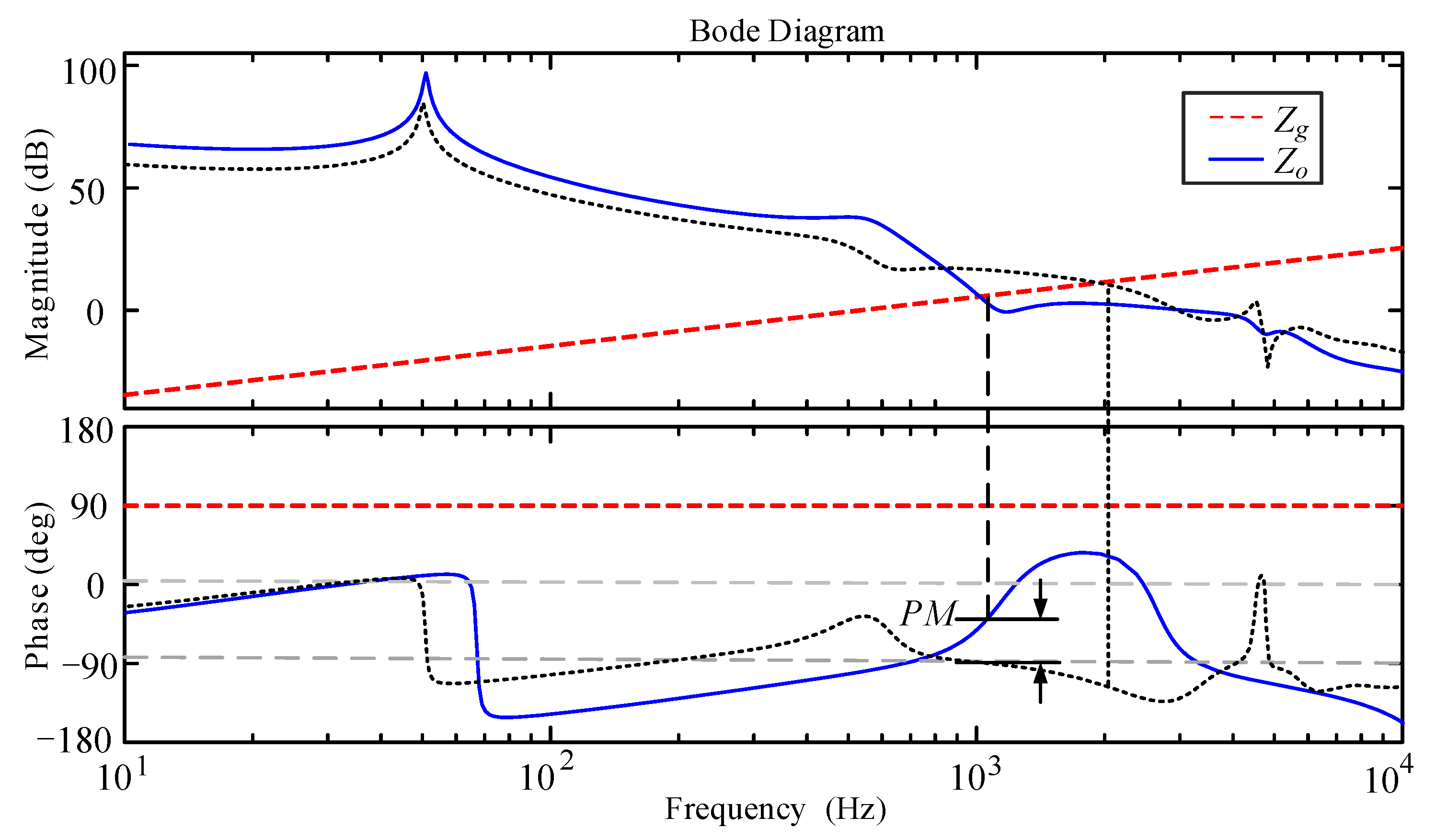
4. Stability Analysis
- (1)
- The grid-connected converter is stable when Zg = 0;
- (2)
- The impedance ratio Zg(s)/Zo(s) satisfies the Nyquist stability criterion.
5. Simulation and Experimental Verification
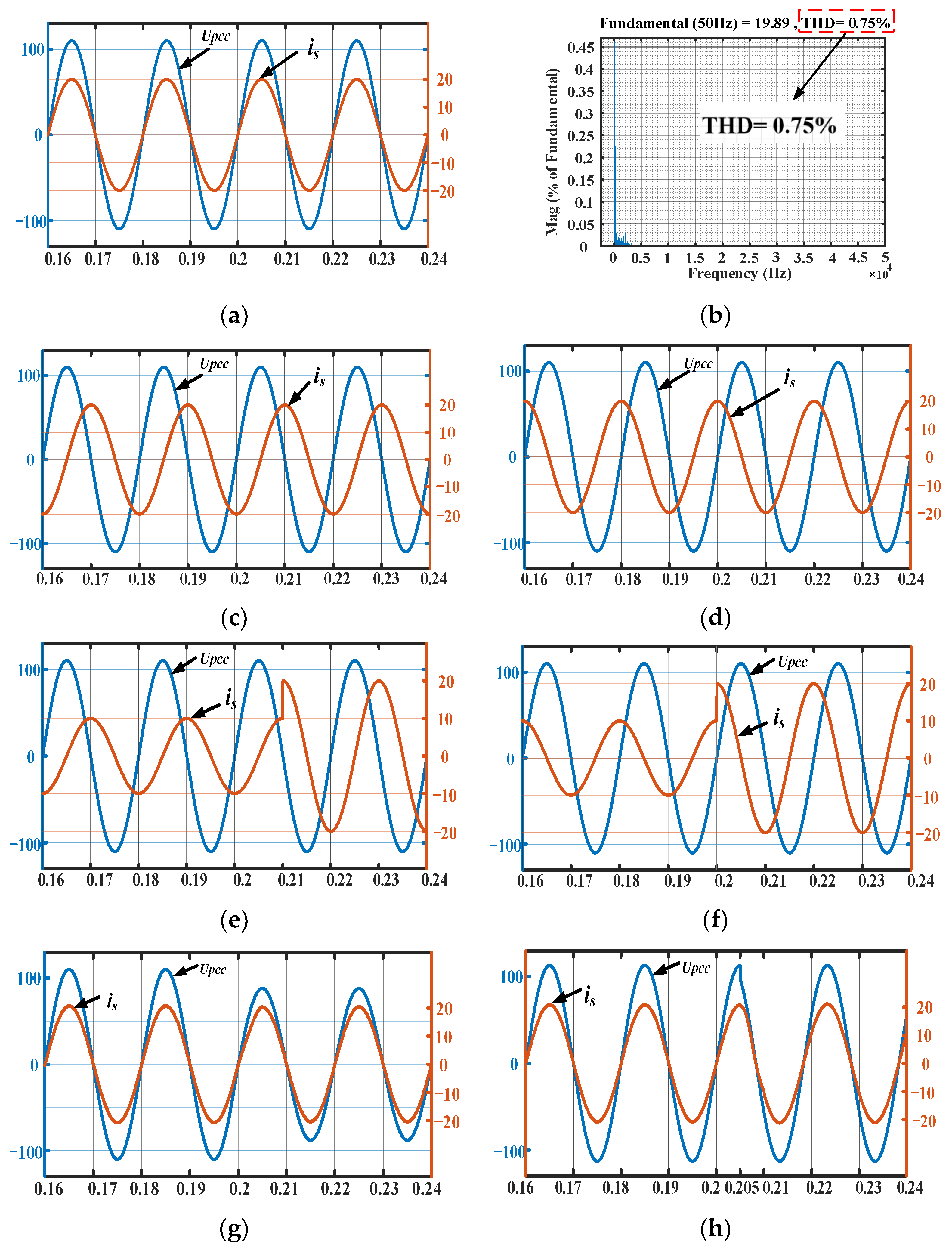
5.1. Simulation
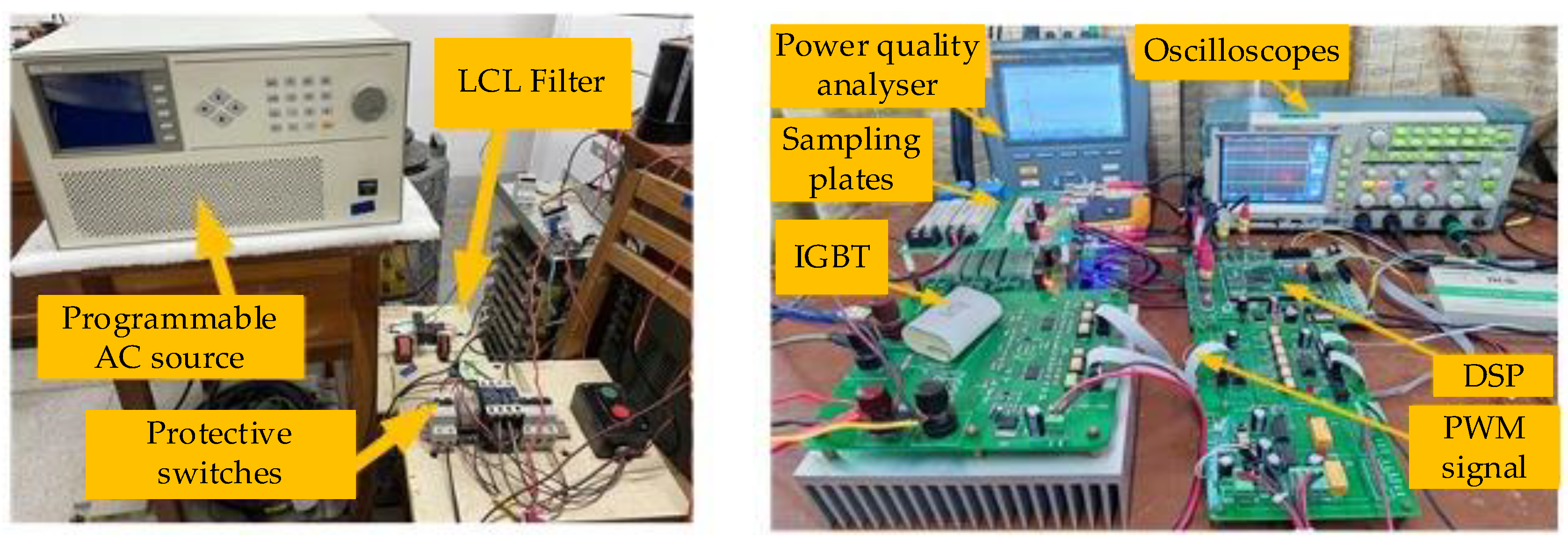
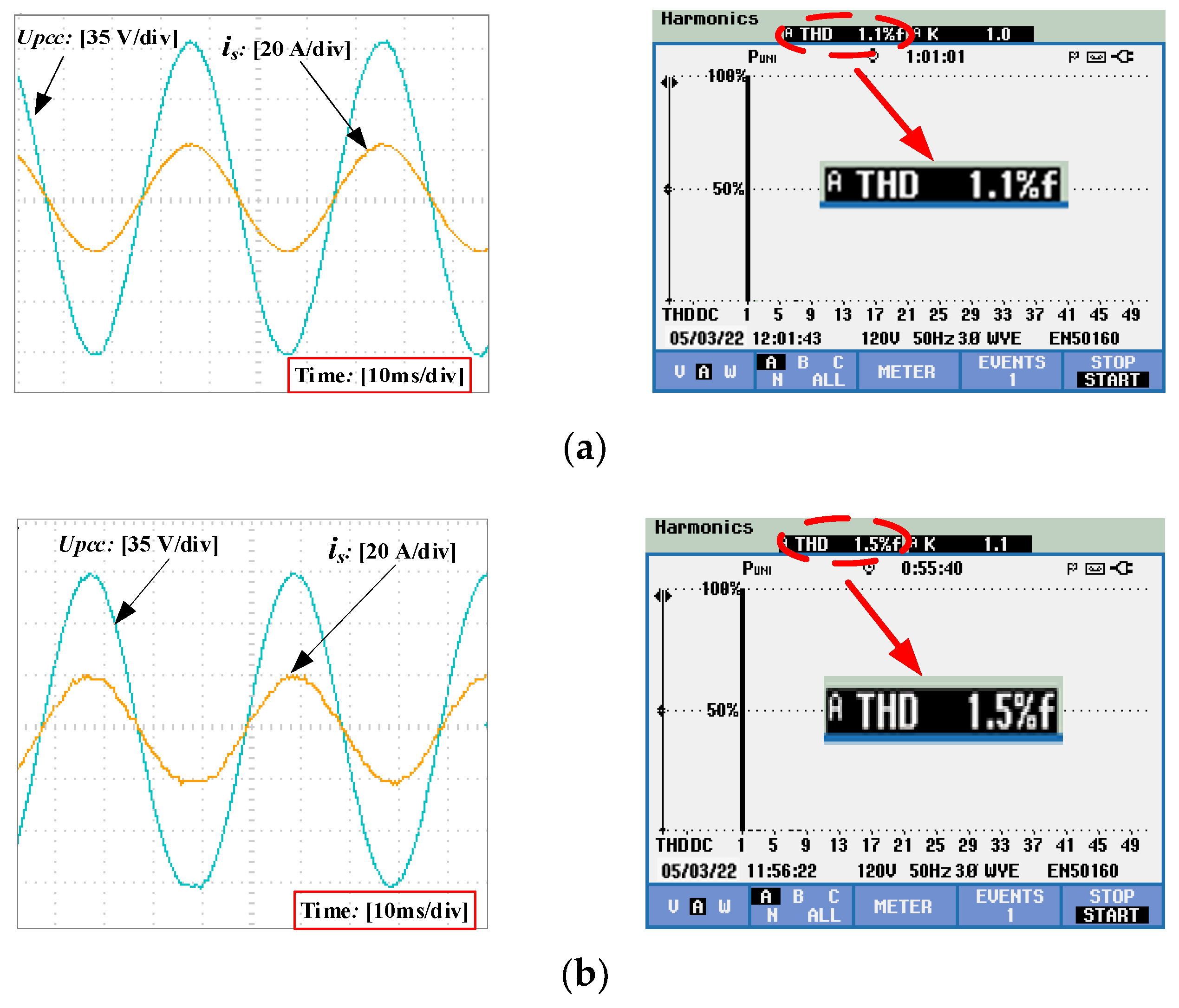
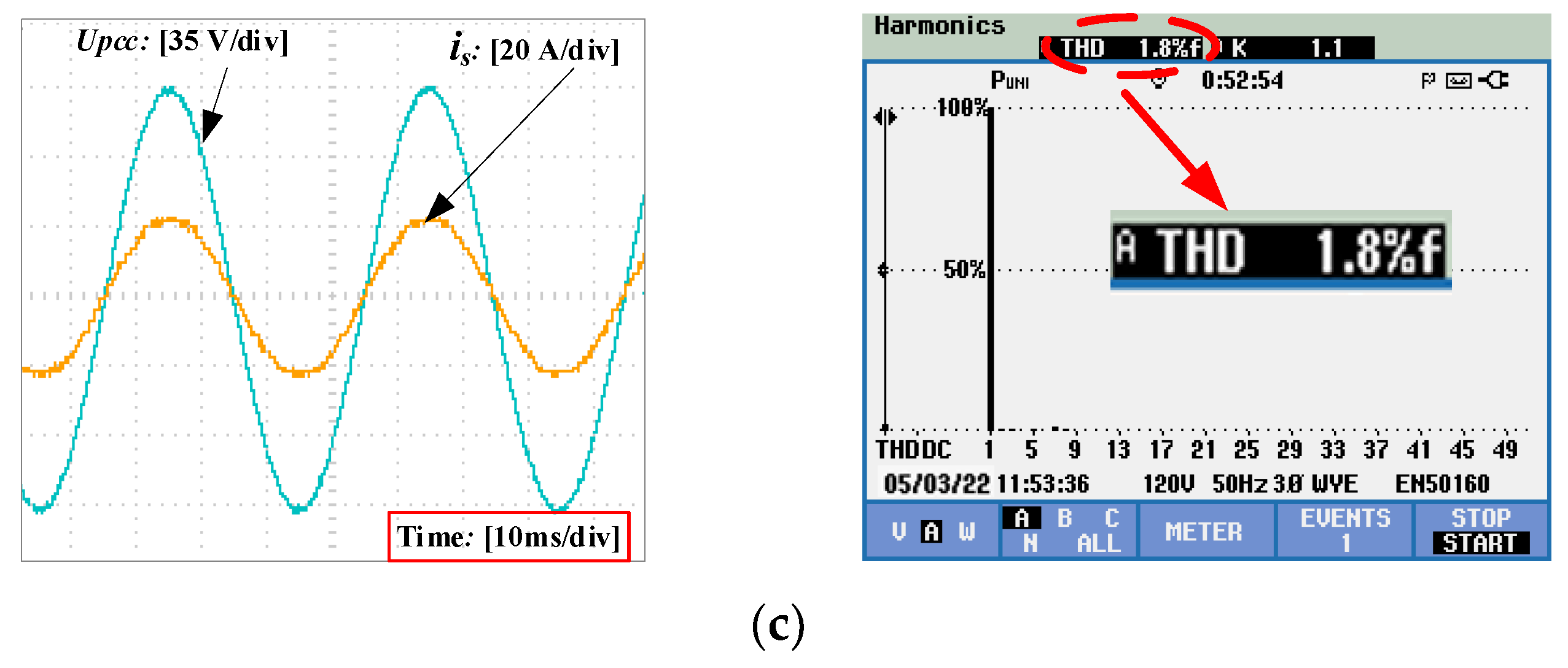
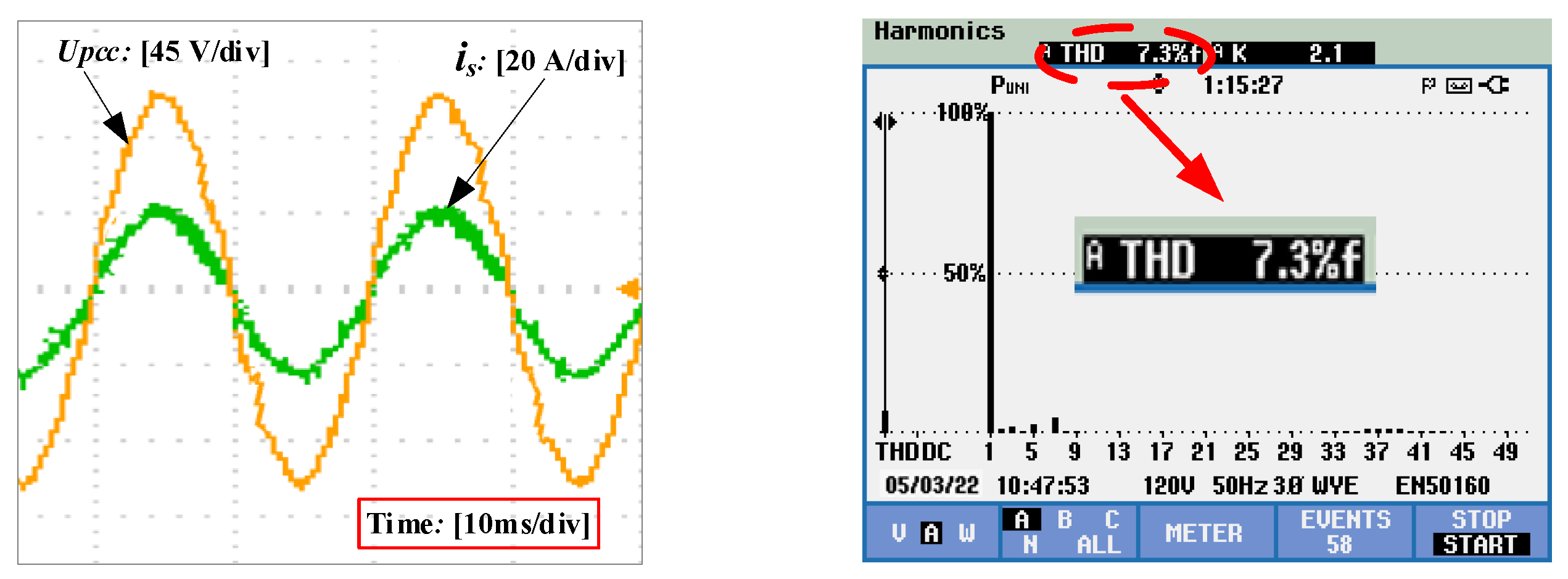
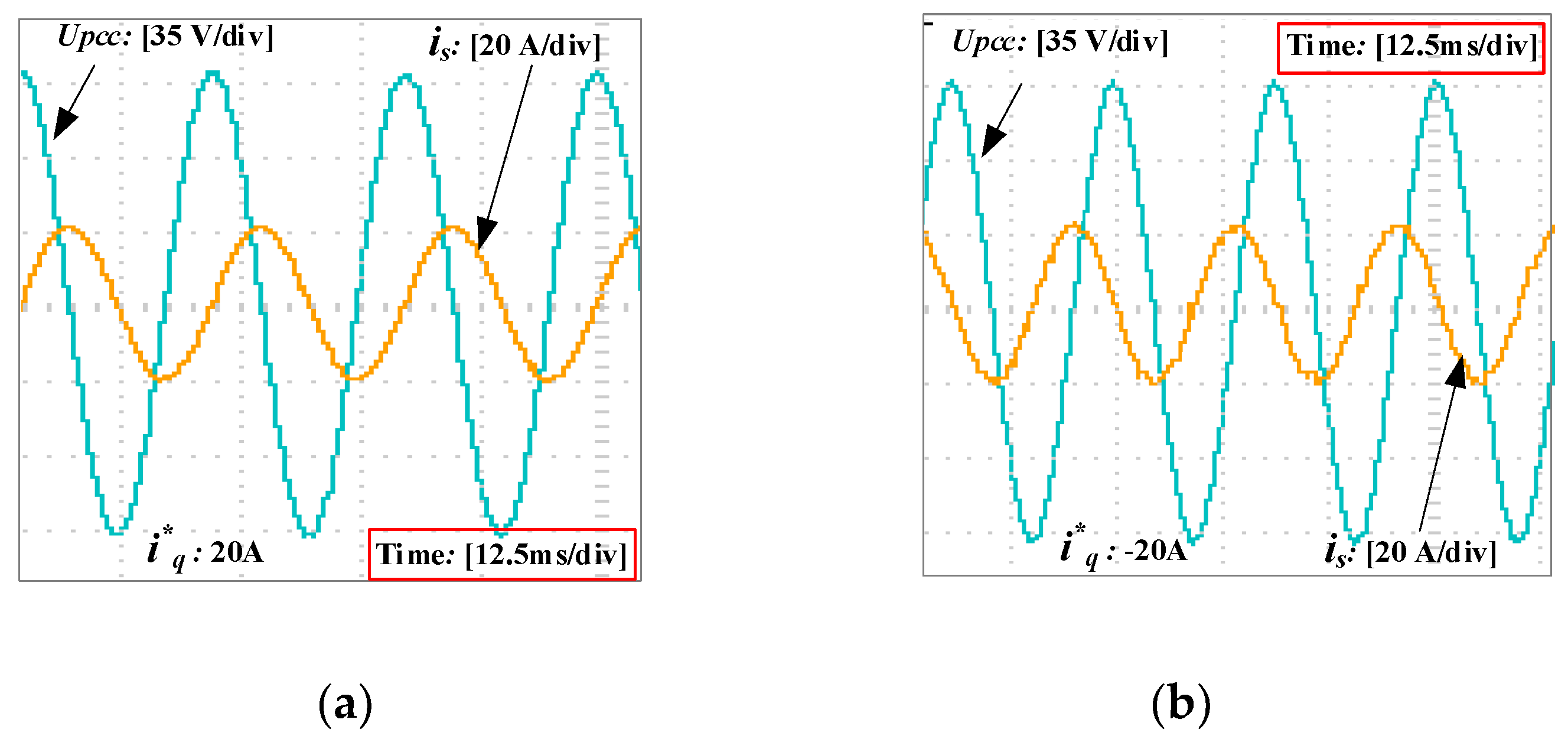
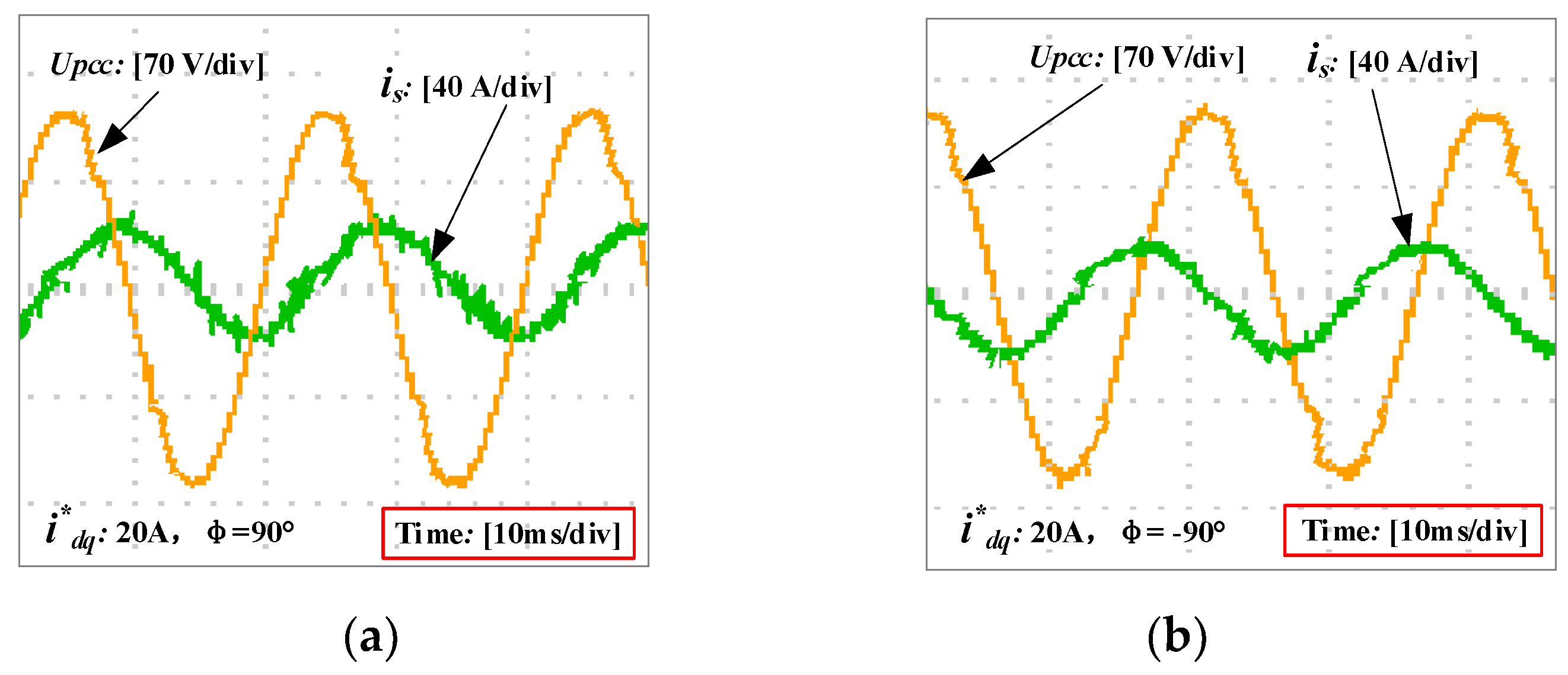
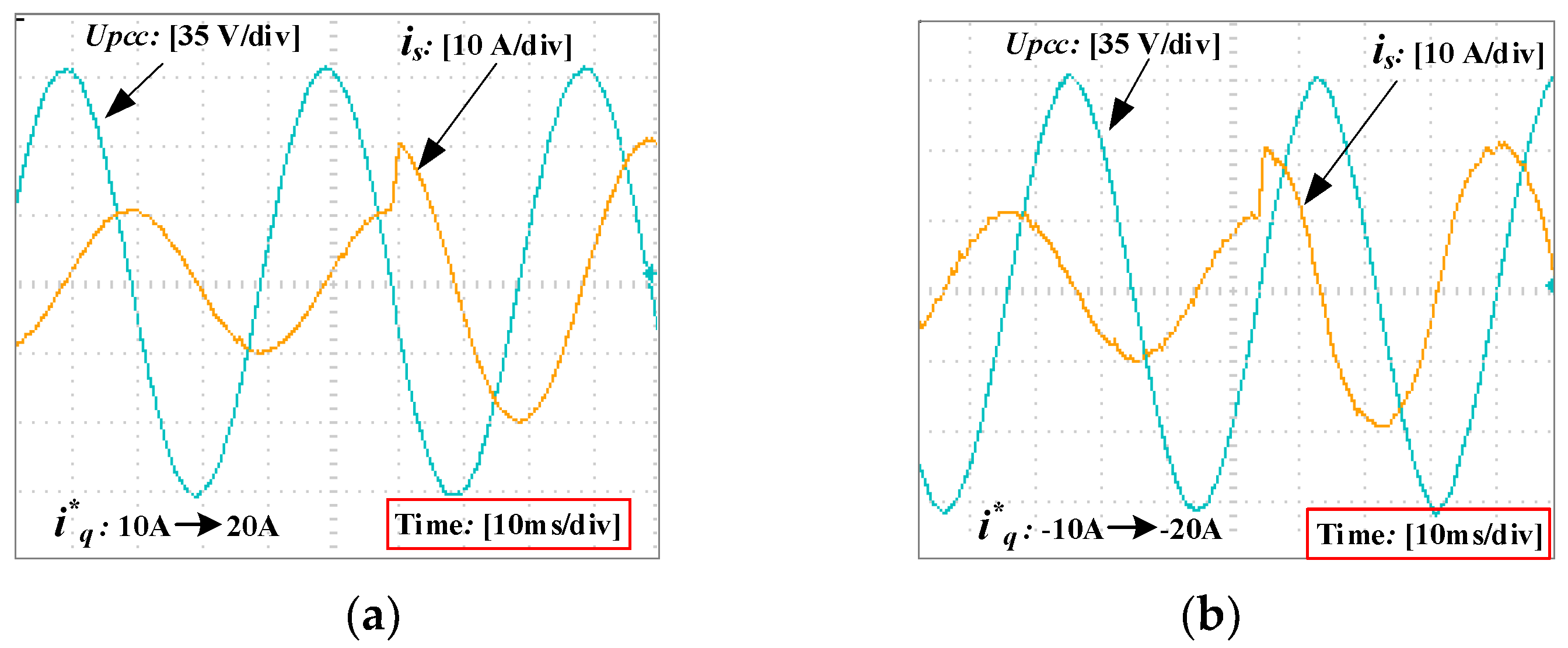
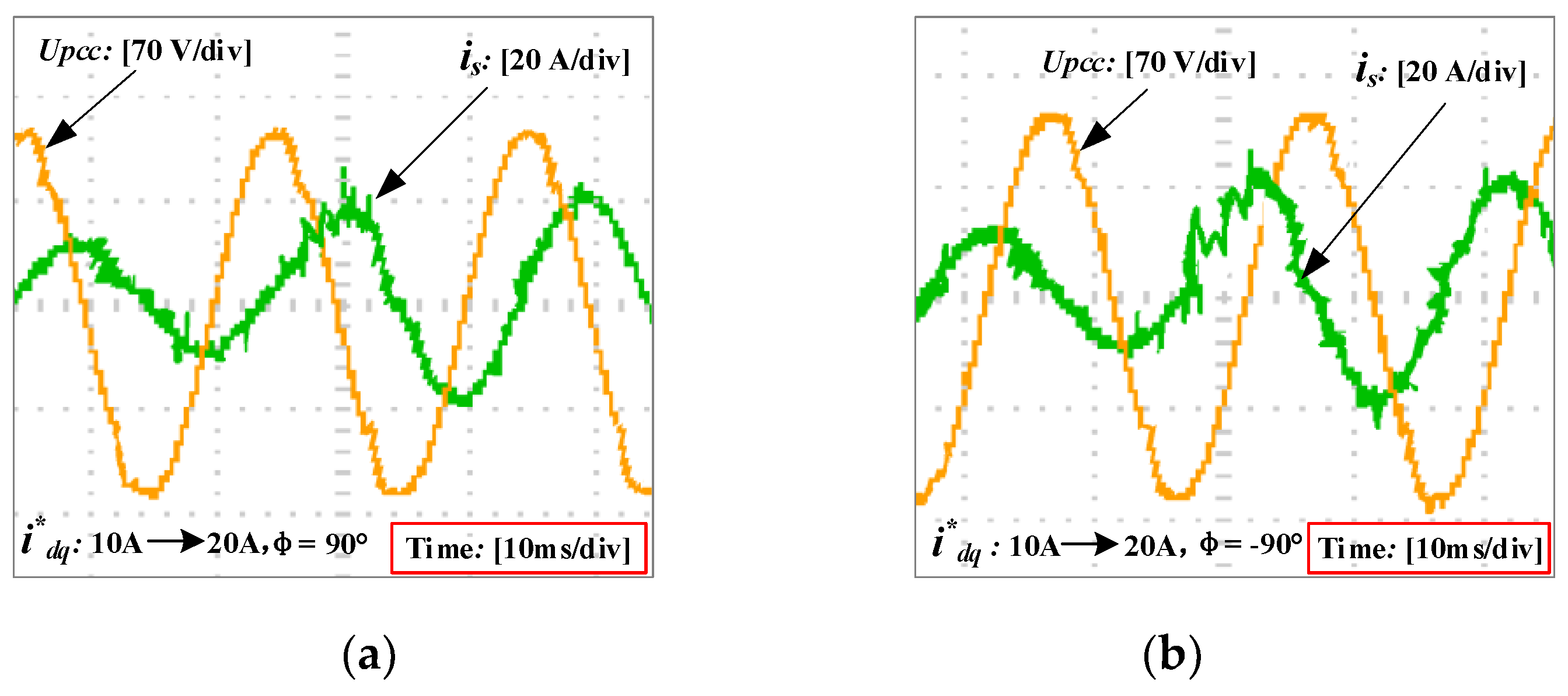
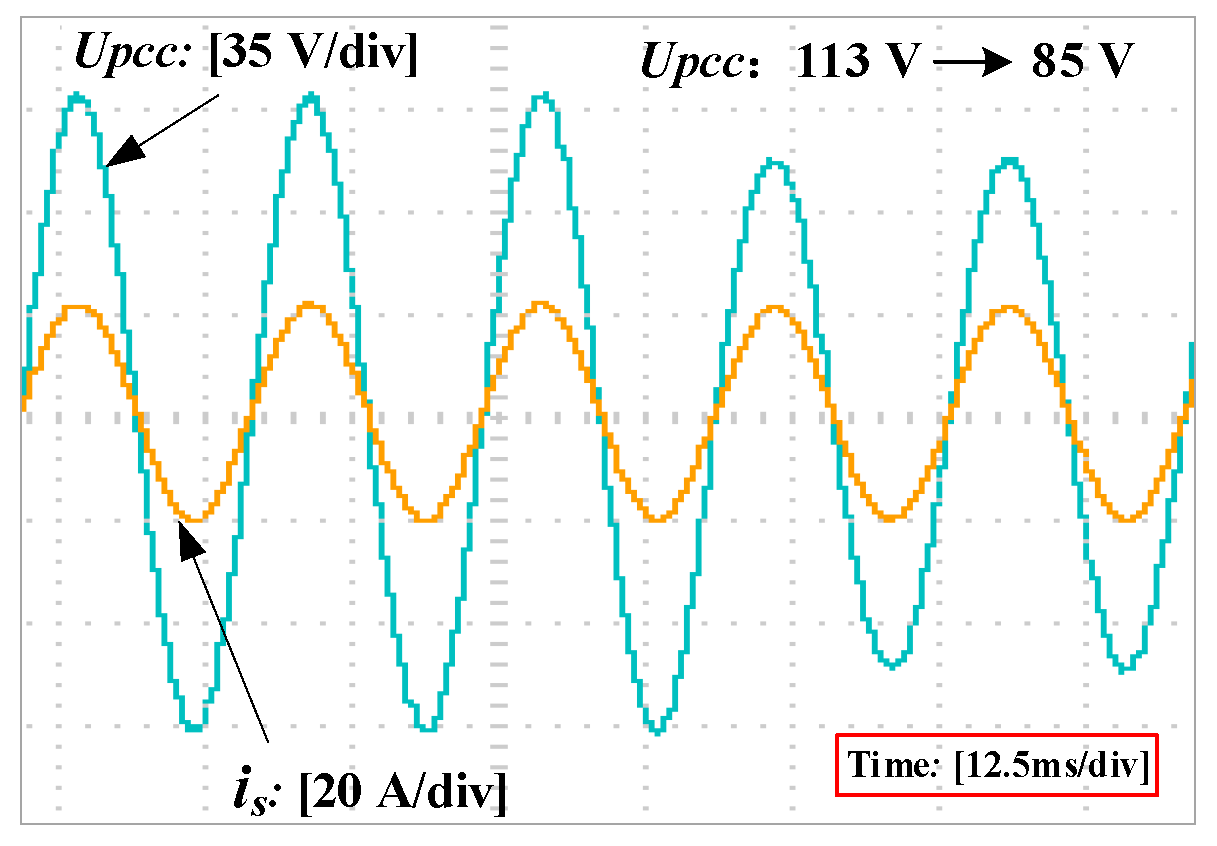
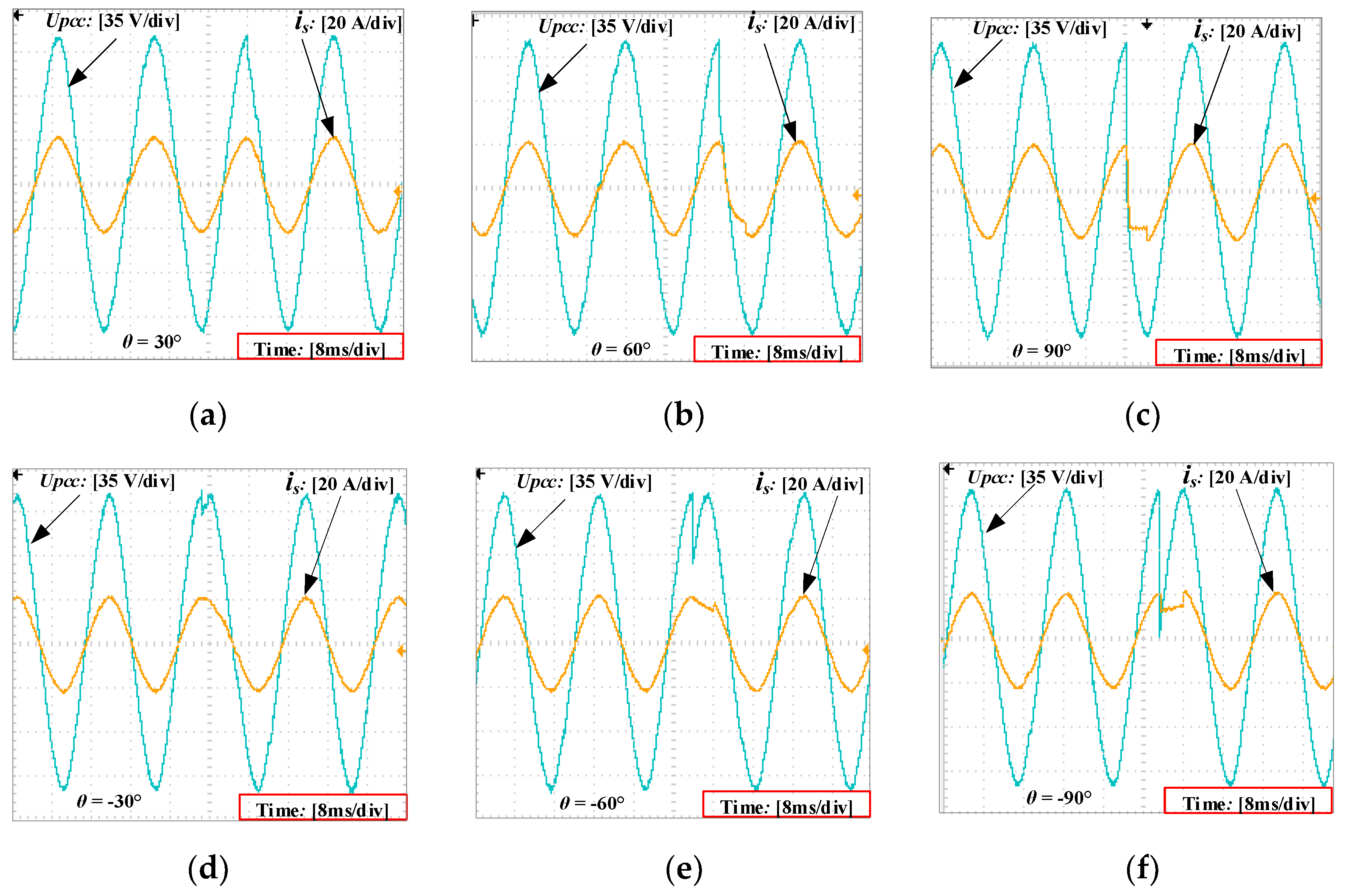
5.2. Experimental Verification
6. Conclusions
- (1)
- The proposed control strategy can effectively avoid the harmonic and instability problems caused by PLL under weak grid conditions. The THD of the grid current is less than 1.8% and the third and fifth harmonic contents are less than 1.1%. Compared with the traditional control strategy, it has better steady-state performance and stronger robustness.
- (2)
- This method does not need Park transforms and PLL, which reduces the computation and complexity and is beneficial to digital realization.
- (3)
- When the reactive current or the grid voltage changes suddenly, the system can respond quickly, and the tracking is fast. The system has better dynamic performance.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Priyadarshi, N.; Bhaskar, M.S.; Azam, F.; Singh, M.; Dhaked, D.K.; Taha, I.B.M.; Hussien, M.G. Performance Evaluation of Solar-PV-Based Non-Isolated Switched-Inductor and Switched-Capacitor High-Step-Up Cuk Converter. Electronics 2022, 11, 1381. [Google Scholar] [CrossRef]
- Maganti, S.; Padhy, N.P. A Flexible Compensation Strategy for Weak Grid-Tied Current Controlled Converters under Unbalanced and Harmonic Conditions. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Lin, P.; Zhang, C.; Wang, P.; Li, X.; Xiao, J.; Tu, P.; Hoong, C.F. A global robust output regulation method for grid-connected inverter with LCL filter in weak grid condition. In Proceedings of the 2017 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), Siem Reap, Cambodia, 18–20 June 2017; pp. 1646–1651. [Google Scholar] [CrossRef]
- Sedo, J.; Kascak, S. Control of single-phase grid connected inverter system. In Proceedings of the 2016 ELEKTRO, Strbske Pleso, Slovakia, 16–18 May 2016; pp. 207–212. [Google Scholar] [CrossRef]
- Wu, H.; Wang, X. Design-Oriented Transient Stability Analysis of PLL-Synchronized Voltage-Source Converters. IEEE Trans. Power Electron. 2019, 35, 3573–3589. [Google Scholar] [CrossRef] [Green Version]
- Fang, J.; Li, X.; Li, H.; Tang, Y. Stability Improvement for Three-Phase Grid-Connected Converters through Impedance Reshaping in Quadrature-Axis. IEEE Trans. Power Electron. 2017, 33, 8365–8375. [Google Scholar] [CrossRef]
- Zhu, D.; Zhou, S.; Zou, X.; Kang, Y.; Zou, K. Small-Signal Disturbance Compensation Control for LCL-Type Grid-Connected Converter in Weak Grid. IEEE Trans. Ind. Appl. 2020, 56, 2852–2861. [Google Scholar] [CrossRef]
- Yang, D.; Wang, X.; Liu, F.; Xin, K.; Liu, Y.; Blaabjerg, F. Symmetrical PLL for SISO Impedance Modeling and Enhanced Stability in Weak Grids. IEEE Trans. Power Electron. 2019, 35, 1473–1483. [Google Scholar] [CrossRef]
- Zhu, D.; Zhou, S.; Zou, X.; Kang, Y. Improved Design of PLL Controller for LCL-Type Grid-Connected Converter in Weak Grid. IEEE Trans. Power Electron. 2019, 35, 4715–4727. [Google Scholar] [CrossRef]
- Zhou, J.Z. Impact of short circuit ratio and phase locked loop parameters on the small-signal behaviour of a VSC-HVdc converter. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; p. 1. [Google Scholar] [CrossRef]
- Wu, X.; Huang, T.; Chen, X.; Hu, H.; He, G. Frequency Characteristic and Impedance Analysis on Three-Phase Grid-Connected Inverters Based on DDSRF-PLL. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Korea, 27–31 May 2019. [Google Scholar] [CrossRef]
- Scoltock, J.; Geyer, T.; Madawala, U.K. Model Predictive Direct Power Control for Grid-Connected NPC Converters. IEEE Trans. Ind. Electron. 2015, 62, 5319–5328. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H.-P. Power-Synchronization Control of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Syst. 2009, 25, 809–820. [Google Scholar] [CrossRef]
- Sun, Y.; Li, S. Comparison of conventional and a novel direct-current vector control for a LCL-filter based VSC-converter connected to weak grid. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Li, Z.; Yang, L.; Yang, D.; Peng, Z.; Shao, D.; Liu, J. Indirect Current Control Method Based on Reference Current Compensation of an LCL-Type Grid-Connected Inverter. Energies 2022, 15, 965. [Google Scholar] [CrossRef]
- Agorreta, J.L.; Borrega, M.; López, J.; Marroyo, L. Modeling and Control of $N$ -Paralleled Grid-Connected Inverters with LCL Filter Coupled Due to Grid Impedance in PV Plants. IEEE Trans. Power Electron. 2010, 26, 770–785. [Google Scholar] [CrossRef]
- Wang, X.; Ruan, X.; Liu, S.; Tse, C.K. Full Feedforward of Grid Voltage for Grid-Connected Inverter with LCL Filter to Suppress Current Distortion Due to Grid Voltage Harmonics. IEEE Trans. Power Electron. 2010, 25, 3119–3127. [Google Scholar] [CrossRef]
- Rodriguez, P.; Pou, J.; Bergas, J.; Candela, J.I.; Burgos, R.P.; Boroyevich, D. Decoupled Double Synchronous Reference Frame PLL for Power Converters Control. IEEE Trans. Power Electron. 2007, 22, 584–592. [Google Scholar] [CrossRef]
- Rodríguez, P.; Luna, A.; Candela, I.; Mujal, R.; Teodorescu, R.; Blaabjerg, F. Multiresonant Frequency-Locked Loop for Grid Synchronization of Power Converters under Distorted Grid Conditions. IEEE Trans. Ind. Electron. 2010, 58, 127–138. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Gercek, C.; Renner, H.; Reinders, A.; Fickert, L. Resonance Instability of Photovoltaic E-Bike Charging Stations: Control Parameters Analysis, Modeling and Experiment. Appl. Sci. 2019, 9, 252. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vidal, A.; Yepes, A.G.; Doval-Gandoy, J.; Freijedo, F.D. Small-Signal Modeling, Stability Analysis and Design Optimization of Single-Phase Delay-Based PLLs. IEEE Trans. Power Electron. 2015, 31, 3517–3527. [Google Scholar] [CrossRef] [Green Version]
- Liserre, M.; Teodorescu, R.; Blaabjerg, F. Stability of photovoltaic and wind turbine grid-connected inverters for a large set of grid impedance values. IEEE Trans. Power Electron. 2006, 21, 263–272. [Google Scholar] [CrossRef]
- Strachan, N.P.W.; Jovcic, D. Stability of a Variable-Speed Permanent Magnet Wind Generator with Weak AC Grids. IEEE Trans. Power Deliv. 2010, 25, 2779–2788. [Google Scholar] [CrossRef]
- Wang, X.; Ruan, X.; Bao, C.; Pan, D.; Xu, L. Design of the PI regulator and feedback coefficient of capacitor current for grid-connected inverter with an LCL filter in discrete-time domain. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 1657–1662. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Ug | 80 V |
| 150 V | |
| fo | 50 Hz |
| fs | 20 kHz |
| fsw | 10 kHz |
| L1 | 300 μH |
| C | 10 μF |
| L2 | 180 μH |
| Utri | 3 V |
| H2 | 0.14 |
| C1 | 10,000 μF |
| RL | 40 Ω |
| 3rd | 5th | |
|---|---|---|
| Zg = 0 mH | 0.78% | 0.49% |
| Zg = 0.9 mH | 0.95% | 0.58% |
| Zg = 1.8 mH | 1.06% | 0.69% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, L.; Zeng, S.; Liu, J.; Zhang, Z.; Yao, J. Control and Stability Analysis of the LCL-Type Grid-Connected Converter without Phase-Locked Loop under Weak Grid Conditions. Electronics 2022, 11, 3322. https://doi.org/10.3390/electronics11203322
Xie L, Zeng S, Liu J, Zhang Z, Yao J. Control and Stability Analysis of the LCL-Type Grid-Connected Converter without Phase-Locked Loop under Weak Grid Conditions. Electronics. 2022; 11(20):3322. https://doi.org/10.3390/electronics11203322
Chicago/Turabian StyleXie, Lingling, Sencai Zeng, Jinbao Liu, Zhao Zhang, and Junyi Yao. 2022. "Control and Stability Analysis of the LCL-Type Grid-Connected Converter without Phase-Locked Loop under Weak Grid Conditions" Electronics 11, no. 20: 3322. https://doi.org/10.3390/electronics11203322